最小次元状態オブザーバ…Homework
[1] 制御対象のモデルが

で与えられるとします。これに対する状態オブザーバは、微分方程式

で表され、解ベクトル は、制御対象の状態ベクトル
は、制御対象の状態ベクトル と同じ次元数
と同じ次元数 を持ちます。
を持ちます。
いま、出力方程式 (
( のサイズは
のサイズは 、行フルランク)を通して、状態に関する情報が部分的に得られていることに注目します。そこで、もう一つの補完的な出力方程式
、行フルランク)を通して、状態に関する情報が部分的に得られていることに注目します。そこで、もう一つの補完的な出力方程式 (
( のサイズは
のサイズは 、行フルランク)を
、行フルランク)を![\left[\begin{array}{c} C\\ U \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-11ae4fa5860643b918bc291c015d1d2a_l3.png "Rendered by QuickLaTeX.com") が正則となるように適切に選んで
が正則となるように適切に選んで
![\displaystyle{(3)\quad \left[\begin{array}{c} y(t)\\ z(t) \end{array}\right] = \left[\begin{array}{c} C\\ U \end{array}\right]x(t) \Rightarrow x(t)= \left[\begin{array}{c} C\\ U \end{array}\right]^{-1} \left[\begin{array}{c} y(t)\\ z(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b28a7aae35bcf881f67e5569ccd68d85_l3.png "Rendered by QuickLaTeX.com")
とすれば、状態に関する全情報が得られそうです。もちろん

を達成する仕組みが必要です。いま、その仕組みを

とします。(5)の第1式から、を掛けた(1)の第1式を辺々引くと

を得ます。ここで

を仮定し、 を
を

とおけば

を得ます。もし が安定行列であれば、(4)を達成できます。また
が安定行列であれば、(4)を達成できます。また

を仮定すると

を得て、状態推定が行われていることがわかります。状態オブザーバ(2)と比べると、計算機内で解くべき微分方程式の解ベクトルの次元数がから に低次元化されていることになります。が正則となるためには、の行数は以下にすることはできませんから、最小次元状態オブザーバと呼ばれています。
に低次元化されていることになります。が正則となるためには、の行数は以下にすることはできませんから、最小次元状態オブザーバと呼ばれています。
[2] 以上から、適当なを選んで、(7)、(8)、(10)を満足し、安定行列をもつ(3)を設計することを考えます。たとえば![C=[I_p\ 0]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3b9688ae8c8aeac553550e792c30bf18_l3.png "Rendered by QuickLaTeX.com") のときは
のときは![U=[-L\ I_{n-p}]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-83c3f97232fcbdd1c16cd61be2e4b27e_l3.png "Rendered by QuickLaTeX.com") のように選びます(
のように選びます( のサイズは
のサイズは )。このとき、(7)と(10)をまとめた
)。このとき、(7)と(10)をまとめた
![\displaystyle{(12)\quad \left[\begin{array}{cc} \hat{A}&\hat{B}\\ \hat{C}&\hat{D} \end{array}\right] = \left[\begin{array}{cc} UA\\ I_n \end{array}\right] \left[\begin{array}{cc} U\\ C \end{array}\right]^{-1} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a9e11f95310f8f3e91322bbb209c8f4e_l3.png "Rendered by QuickLaTeX.com")
において、![A=\left[\begin{array}{cc} A_{11}& A_{12}\\ A_{21}& A_{22} \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6da1affedca741e17d659c9182e04b50_l3.png "Rendered by QuickLaTeX.com") (
( のサイズは
のサイズは )のように分割すると
)のように分割すると
![\displaystyle{(13)\quad \left[\begin{array}{cc} -L& I_{n-p} \end{array}\right] \left[\begin{array}{cc} A_{11}& A_{12}\\ A_{21}& A_{22} \end{array}\right] = \left[\begin{array}{cc} -LA_{11}+A_{21}& -LA_{12}+A_{22} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-013eed85425387d5eadeb3b6a5391297_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(14)\quad \left[\begin{array}{cc} -L& I_{n-p}\\ I_p & 0 \end{array}\right]^{-1} = \left[\begin{array}{cc} 0& I_{p}\\ I_{n-p} & L \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-660d9c1df75183d3afec6705a6c3ac49_l3.png "Rendered by QuickLaTeX.com")
より、、 、
、 、
、 は次式から求められます。
は次式から求められます。
![\displaystyle{(15)\quad \boxed{\left\{\begin{array}{lll} \hat{A}=A_{22}-LA_{12}\\ \hat{B}=A_{21}-LA_{11}+\hat{A}L\\ \hat{C}= \left[\begin{array}{cc} 0\\ I_{n-p} \end{array}\right]\\ \hat{D}= \left[\begin{array}{cc} I_{p}\\ L \end{array}\right] \end{array}\right.} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ba9d6526eff83e7894d3ec54c6f96e0f_l3.png "Rendered by QuickLaTeX.com")
ここで、はが安定行列となるように選ぶ必要があります。そのためには が可観測対であればよいのですが、これについてはあとで触れます。また、は(10)から定めます。
が可観測対であればよいのですが、これについてはあとで触れます。また、は(10)から定めます。
● モータの状態方程式
![\displaystyle{(16)\quad \left[\begin{array}{c} \dot{\theta}(t)\\ \dot{\omega}(t) \end{array}\right]= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 0 & -\frac{1}{T_m} \end{array}\right] }_{A} \left[\begin{array}{c} \theta(t)\\ \omega(t) \end{array}\right]+ \underbrace{ \left[\begin{array}{c} 0\\ \frac{1}{K_ET_m} \end{array}\right] }_{B} u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e95207cda654ebaf7485fe467b4eff54_l3.png "Rendered by QuickLaTeX.com")
と出力方程式
![\displaystyle{(17)\quad y(t)= \underbrace{ \left[\begin{array}{cc} 1 & 0 \end{array}\right] }_{C} \left[\begin{array}{c} \theta(t)\\ \omega(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-181f79035e64702aea850bc818dfa728_l3.png "Rendered by QuickLaTeX.com")
に対する状態オブザーバの低次元化を行ってみます。ちょうど![C=[1\ 0]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1eb038408256303120052256fece6bdb_l3.png "Rendered by QuickLaTeX.com") となっているので、
となっているので、![U=[-L\ 1]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ac9bfaf2bc4a8c3d4727c3031ff267d6_l3.png "Rendered by QuickLaTeX.com") とおきます。設計式(15)に
とおきます。設計式(15)に 、
、 、
、 、
、 を代入して
を代入して
![\displaystyle{(18)\quad \left\{\begin{array}{lll} \hat{A}=-\frac{1}{T_m}-L\\ \hat{B}=\hat{A}L\\ \hat{C}= \left[\begin{array}{cc} 0\\ 1 \end{array}\right]\\ \hat{D}= \left[\begin{array}{cc} 1\\ L \end{array}\right]\\ \hat{J}=\frac{1}{K_ET_m} \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5c9ef1b1a40ae6aeaab1a8d4e8bfc53c_l3.png "Rendered by QuickLaTeX.com")
ここで、は とするのであれば
とするのであれば と決めます。以上から、次の低次元化された状態オブザーバが得られました。
と決めます。以上から、次の低次元化された状態オブザーバが得られました。
![\displaystyle{(19)\quad \left\{\begin{array}{lll} \dot{\hat{z}}(t)=\underbrace{-\frac{\alpha}{T_m}}_{\hat{A}}\hat{z}(t) +\underbrace{\frac{\alpha(1-\alpha)}{T_m^2}}_{\hat{B}}y(t) +\underbrace{\frac{1}{K_ET_m}}_{\hat{J}}u(t),\ \hat{z}(0)=0\\ \hat{x}(t)= \underbrace{ \left[\begin{array}{cc} 0\\ 1 \end{array}\right]}_{\hat{C}}\hat{z}(t) + \underbrace{ \left[\begin{array}{cc} 1\\ L \end{array}\right] }_{\hat{D}}y(t) \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9bfd472ab38f4e90833894fadfad6f9d_l3.png "Rendered by QuickLaTeX.com")
●次図は 、
、 の下で、
の下で、 と変えたとき、状態オブザーバが真の状態を推定する様子をシミュレーションしています。
と変えたとき、状態オブザーバが真の状態を推定する様子をシミュレーションしています。
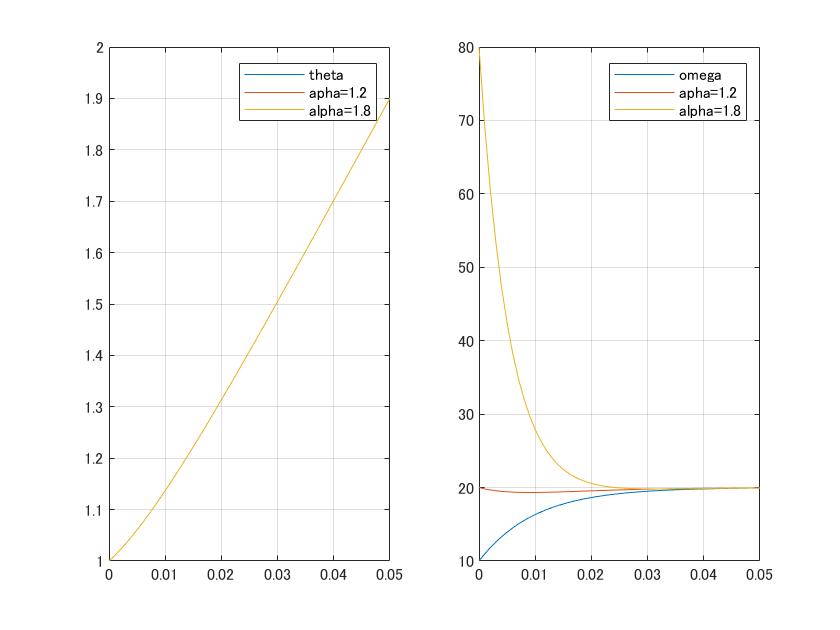 図1 状態推定の例
図1 状態推定の例
演習 A42…Flipped Classroom
次のコードを用いて図1のグラフを描け。
| MATLAB |
|
| SCILAB |
|
Note A42 線形関数オブザーバ
制御対象の状態空間表現

に対して、もう一つの状態空間表現

を考えます。ただし、サイズ の行列とサイズ
の行列とサイズ の行列
の行列 に対して
に対して

が満足されるものとします。このとき

から

を得ます。また

を得て、状態の線形関数 の推定が行われていることがわかります。
の推定が行われていることがわかります。
したがって、条件(3)を満足する状態空間表現(2)は、線形関数オブザーバと呼ばれます。特に のとき、は最小次元状態オブザーバとなります。
のとき、は最小次元状態オブザーバとなります。
●興味深いのは、状態フィードバック

を推定させる場合で、線形関数オブザーバの次元数 が最小次元状態オブザーバの次数より小さくできる可能性があります。
が最小次元状態オブザーバの次数より小さくできる可能性があります。
たとえば機械系でよく見られる、次の1入力 出力
出力 次系
次系
![\displaystyle{(10)\quad \left\{\begin{array}{l} \left[\begin{array}{c} \dot{y}(t)\\ \ddot{y}(t) \end{array}\right]= \underbrace{ \left[\begin{array}{cc} 0 & I_p \\ A_{21} & A_{22} \end{array}\right] }_{A} \left[\begin{array}{c} y(t)\\ \dot{y}(t) \end{array}\right]+ \underbrace{ \left[\begin{array}{c} 0\\ B_2 \end{array}\right] }_{B} u(t)\\ y(t)= \underbrace{ \left[\begin{array}{cc} I_n & 0 \end{array}\right] }_{C} \left[\begin{array}{c} y(t)\\ \dot{y}(t) \end{array}\right] \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-70c3410208fc14d4768b6a45442062a9_l3.png "Rendered by QuickLaTeX.com")
および、これに対する状態フィードバック
![\displaystyle{(11)\quad u(t)=\underbrace{ \left[\begin{array}{cc} K_1 & K_2 \end{array}\right] }_{K}x(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-76dda86fe4ec6fa4e53fe2df3c3f49f6_l3.png "Rendered by QuickLaTeX.com")
を考えます。この状態フィードバックを推定する線形関数オブザーバは、 入力1出力1次系
入力1出力1次系

として得られます。実際、とを
![\displaystyle{(13)\quad \begin{array}{l} L=A_{22}-\lambda I_p,\ U=K_2 \left[\begin{array}{cc} -L & I_p \end{array}\right] \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-63e157b6fe7523c3e016e3822895c448_l3.png "Rendered by QuickLaTeX.com")
と選べば、(3)の第2、3、4式を満足していることを次のように確かめることができます。
![\displaystyle{(14)\quad \begin{array}{l} \underbrace{ \lambda K_2\left[\begin{array}{cc} -L & I_p \end{array}\right] + K_2(A_{21}+\lambda L) \left[\begin{array}{cc} I_n & 0 \end{array}\right] }_{\hat{A}U+\hat{B}C} = \underbrace{ K_2\left[\begin{array}{cc} -L & I_p \end{array}\right] \left[\begin{array}{cc} 0 & I_p \\ A_{21} & A_{22} \end{array}\right] }_{UA}\\ \underbrace{ K_2B_2 }_{\hat{J}} = \underbrace{ K_2\left[\begin{array}{cc} -L & I_p \end{array}\right] \left[\begin{array}{c} 0\\ B_2 \end{array}\right] }_{UB}\\ \underbrace{ 1\cdot K_2\left[\begin{array}{cc} -L & I_p \end{array}\right] + (K_1+K_2L) \left[\begin{array}{cc} I_n & 0 \end{array}\right] }_{\hat{C}U+\hat{D}C} = \underbrace{ \left[\begin{array}{cc} K_1 & K_2 \end{array}\right] }_{K} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-92fe0b99d4f40416cb7cd4fdcf78d696_l3.png "Rendered by QuickLaTeX.com")
●状態フィードバックを推定する線形関数オブザーバ(したがって最小次元状態オブザーバ)に対しても分離定理を示すことができます。すなわち制御対象のモデル(1)に対して、 の場合の(3)を満たす線形関数オブザーバ(2)による閉ループ系は
の場合の(3)を満たす線形関数オブザーバ(2)による閉ループ系は

を定義すると、次式となります。
![\displaystyle{(16)\quad \boxed{\left[\begin{array}{c} \dot{x}(t) \\ \dot{e}(t) \end{array}\right]= \underbrace{ \left[\begin{array}{cc} A-BF & -B\hat{C} \\ 0 & \hat{A} \end{array}\right] }_{A_{CL}} \left[\begin{array}{c} x(t) \\ e(t) \end{array}\right]} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a941bbb0ba1845c0025a886fd7d9e55a_l3.png "Rendered by QuickLaTeX.com")
この第1式は(1)の状態方程式の に、(2)の出力方程式の
に、(2)の出力方程式の を代入して
を代入して

のように得られます。また、第2式は(6)そのものです。
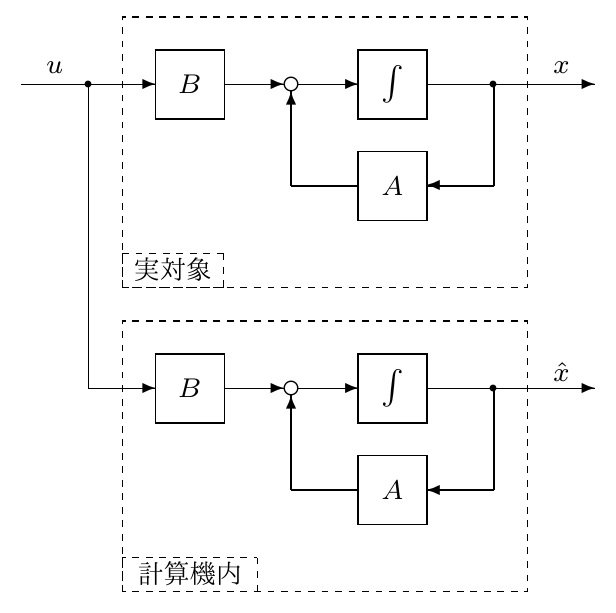 図1 状態オブザーバの考え方(1)
図1 状態オブザーバの考え方(1)


 が安定行列でない限り
が安定行列でない限り
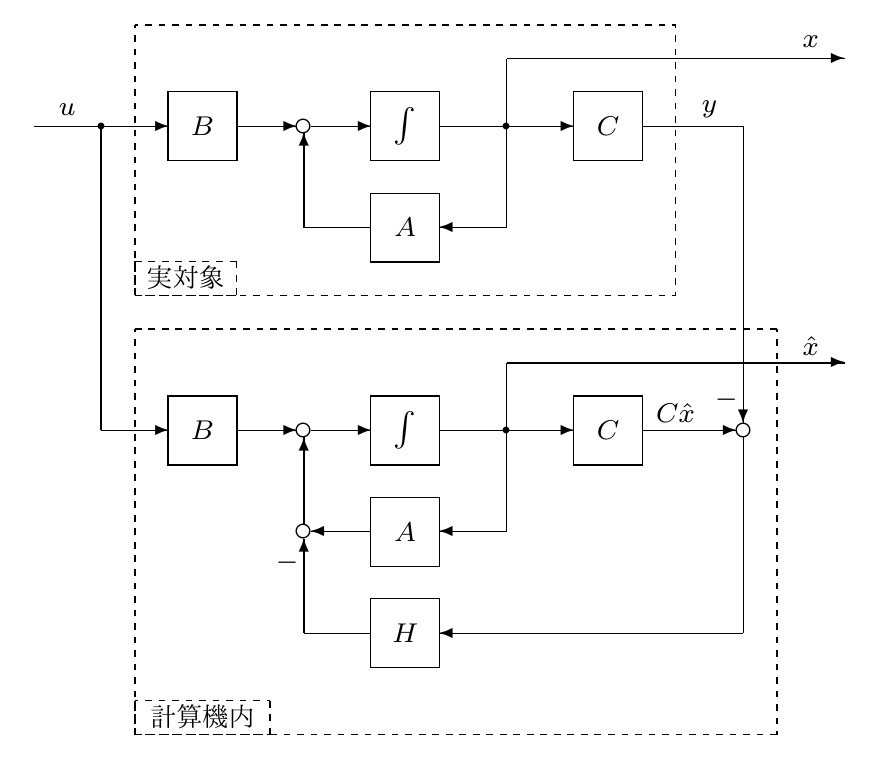 図2 状態オブザーバの考え方(2)
図2 状態オブザーバの考え方(2)

 は適合するサイズを持つ行列です。(6)から(1)の第1式どうしを辺々引くと
は適合するサイズを持つ行列です。(6)から(1)の第1式どうしを辺々引くと
 が安定行列であるとすると
が安定行列であるとすると
 は、制御対象の状態
は、制御対象の状態 を漸近的に推定することができます。
を漸近的に推定することができます。 に対して
に対して であることに注意して
であることに注意して



![\displaystyle{(13)\quad \left[\begin{array}{c} \dot{\theta}(t)\\ \dot{\omega}(t) \end{array}\right]= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 0 & -\frac{1}{T_m} \end{array}\right] }_{A} \left[\begin{array}{c} \theta(t)\\ \omega(t) \end{array}\right]+ \underbrace{ \left[\begin{array}{c} 0\\ \frac{1}{K_ET_m} \end{array}\right] }_{B} u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a95eaa65d14cb9fd7e4b2c26e0599949_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(14)\quad y(t)= \underbrace{ \left[\begin{array}{cc} 1 & 0 \end{array}\right] }_{C} \left[\begin{array}{c} \theta(t)\\ \omega(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b3827f897e0c0c4d4bd29eb0213d28ef_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(15)\quad \left[\begin{array}{c} \dot{\hat{\theta}}(t)\\ \dot{\hat{\omega}}(t) \end{array}\right] =(A-HC) \left[\begin{array}{c} \hat{\theta}(t)\\ \hat{\omega}(t) \end{array}\right] +Bu(t)+Hy(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d8751c5f7f39274e29ad827c0d037478_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(18)\quad A-HC= \left[\begin{array}{cc} 0 & 1 \\ 0 & -\frac{1}{T_m} \end{array}\right] - \left[\begin{array}{cc} h_1 \\ h_2 \end{array}\right] \left[\begin{array}{cc} 1 & 0 \end{array}\right] = \left[\begin{array}{cc} -h_1 & 1 \\ -h_2 & -\frac{1}{T_m} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ad751e230ad9ea29b0aeab00364fdf9b_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(19)\quad \begin{array}{l} \det \left[\begin{array}{cc} \lambda+h_1 & -1 \\ h_2 & \lambda+\frac{1}{T_m} \end{array}\right]\\ =(\lambda+h_1)(\lambda+\frac{1}{T_m})+h_2\\ =\lambda^2+(h_1+\frac{1}{T_m})\lambda+h_1\frac{1}{T_m}+h_2\\ =\lambda^2+2\alpha\frac{1}{T_m}\lambda+(\alpha\frac{1}{T_m})^2\\ \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7385eb112c8af51a54d93f1ffabef5d1_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(21)\quad \begin{array}{l} \left[\begin{array}{c} \dot{\hat{\theta}}(t)\\ \dot{\hat{\omega}}(t) \end{array}\right] =\underbrace{ \left[\begin{array}{cc} -\frac{2\alpha-1}{T_m} & 1 \\ -\frac{(\alpha-1)^2}{T_m^2} & -\frac{1}{T_m} \end{array}\right] }_{A-HC} \left[\begin{array}{c} \hat{\theta}(t)\\ \hat{\omega}(t) \end{array}\right] +\underbrace{ \left[\begin{array}{c} 0\\ \frac{1}{K_ET_m} \end{array}\right] }_{B}u(t)\\ + \underbrace{\left[\begin{array}{c} \frac{2\alpha-1}{T_m} \\ \frac{(\alpha-1)^2}{T_m^2} \end{array}\right] }_{H}y(t) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b514337c82c45e6315198b0db3388da8_l3.png "Rendered by QuickLaTeX.com")
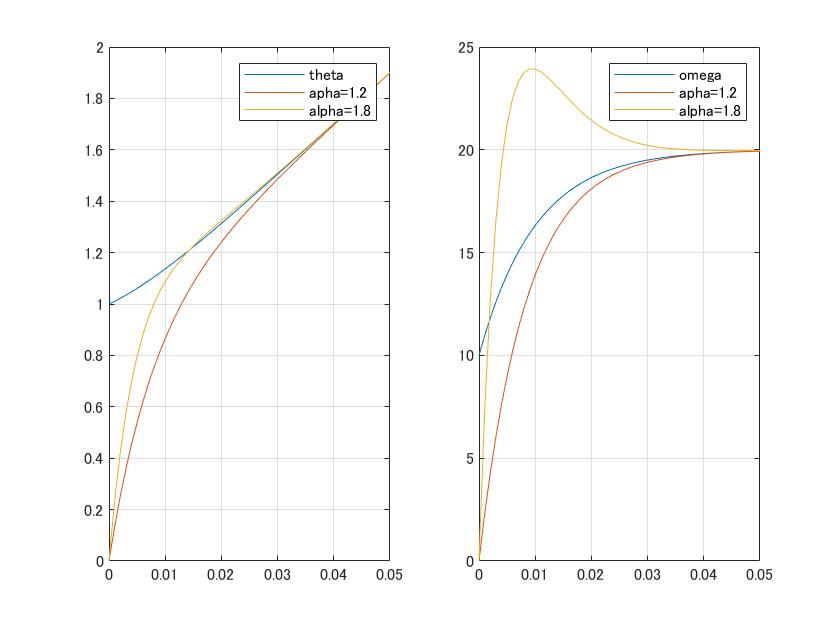 図3 状態推定の例
図3 状態推定の例 は、状態オブザーバを用いて、次のように実施されます。
は、状態オブザーバを用いて、次のように実施されます。

 と
と が安定行列と限らないことに注意してください。また、
が安定行列と限らないことに注意してください。また、

![\displaystyle{(26)\quad \left[\begin{array}{c} \dot{x}(t) \\ \dot{\hat{x}}(t) \end{array}\right]= \left[\begin{array}{cc} A & -BF \\ HC & A-HC-BF \end{array}\right] \left[\begin{array}{c} x(t) \\ \hat{x}(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-237312a5afd90430eb03e92408f0a6e5_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(27)\quad \left[\begin{array}{c} x(t) \\ e(t) \end{array}\right]= \left[\begin{array}{cc} I & 0 \\ -I & I \end{array}\right] \left[\begin{array}{c} x(t) \\ \hat{x}(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-17b3d7389e735c2c5d518b079c986757_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(28)\quad \left[\begin{array}{cc} I & 0 \\ -I & I \end{array}\right] \left[\begin{array}{cc} A & -BF \\ HC & A-HC-BF \end{array}\right]\\ = \left[\begin{array}{cc} A-BF & -BF \\ 0 & A-HC \end{array}\right] \left[\begin{array}{cc} I & 0 \\ -I & I \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5b4da75e25a3ac6ca6e42502fd279f19_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(29)\quad \boxed{\left[\begin{array}{c} \dot{x}(t) \\ \dot{e}(t) \end{array}\right]= \underbrace{ \left[\begin{array}{cc} A-BF & -BF \\ 0 & A-HC \end{array}\right] }_{A_{CL}} \left[\begin{array}{c} x(t) \\ e(t) \end{array}\right]} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8c6ec4764b02f704e5faf2444cdf4250_l3.png "Rendered by QuickLaTeX.com")
 の固有値は、
の固有値は、 の設計は状態オブザーバゲイン
の設計は状態オブザーバゲイン に対して、次を仮定します。
に対して、次を仮定します。![\displaystyle{(1)\quad {\rm rank}\left[\begin{array}{cccc} B & AB &\cdots & A^{n-1}B \end{array}\right]=n }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2ada331f48c68a50cef238a367fafa9c_l3.png "Rendered by QuickLaTeX.com")


 の特性多項式を任意に設定するための
の特性多項式を任意に設定するための の1つを示します。
の1つを示します。


![\displaystyle{(7)\quad \begin{array}{l} A \underbrace{ \left[\begin{array}{cccc} B & AB &\cdots & A^{n-1}B \end{array}\right] }_{T_1^{-1}}\\ = \underbrace{ \left[\begin{array}{cccc} B & AB &\cdots & A^{n-1}B \end{array}\right] }_{T_1^{-1}} \underbrace{ \left[\begin{array}{ccccc} 0 & \cdots & 0 & -a_n \\ 1 & \cdots & 0 & -a_{n-1} \\ \vdots & \ddots & \vdots &\vdots\\ 0 & \cdots & 1 & -a_1 \end{array}\right] }_{A_1} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0db546a70235247b2e03b1bb4ba933e0_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(8)\quad \boxed{ \begin{array}{l} A_1=T_1AT_1^{-1}= \left[\begin{array}{ccccc} 0 & \cdots & 0 & -a_n \\ 1 & \cdots & 0 & -a_{n-1} \\ \vdots & \ddots & \vdots &\vdots\\ 0 & \cdots & 1 & -a_1 \end{array}\right]\\ B_1=T_1B= \left[\begin{array}{cc} 1 \\ 0\\ \vdots\\ 0 \end{array}\right] \end{array}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c6cf45471e92537f21ce37771de23573_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(9)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{ccccc} 0 & \cdots & 0 & -a_n \\ 1 & \cdots & 0 & -a_{n-1} \\ \vdots & \ddots & \vdots &\vdots\\ 0 & \cdots & 1 & -a_1 \end{array}\right] }_{A_1} \underbrace{ \left[\begin{array}{ccccc} a_{n-1} & a_{n-2} & \cdots & a_1 & 1 \\ a_{n-2} & a_{n-3} & \cdots & 1 & 0 \\ \vdots & \vdots & \cdots & \vdots & \vdots \\ a_1 & 1 & \cdots & 0 & 0 \\ 1 & 0 & \cdots & 0 & 0 \end{array}\right] }_{T_2^{-1}}\\ =\underbrace{ \left[\begin{array}{ccccc} a_{n-1} & a_{n-2} & \cdots & a_1 & 1 \\ a_{n-2} & a_{n-3} & \cdots & 1 & 0 \\ \vdots & \vdots & \cdots & \vdots & \vdots \\ a_1 & 1 & \cdots & 0 & 0 \\ 1 & 0 & \cdots & 0 & 0 \end{array}\right] }_{T_2^{-1}} \underbrace{ \left[\begin{array}{ccccc} 0 & 1 & \cdots & 0\\ \vdots & \vdots & \cdots & \vdots \\ 0 & 0 & \cdots & 1\\ -a_n & -a_{n-1} & \cdots & -a_1 \end{array}\right] }_{A_2} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5f95461a20f296c7ece2c87fd871f594_l3.png "Rendered by QuickLaTeX.com")
 のときは、次のように示されます。
のときは、次のように示されます。![\displaystyle{(10)\quad {\rm LHS}=\left[\begin{array}{cc} 0 & -a_2 \\ 1 & -a_1 \end{array}\right] \left[\begin{array}{cc} a_1 & 1 \\ 1 & 0 \end{array}\right] = \left[\begin{array}{cc} -a_2 & 0 \\ 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d8426480e952864367f40cf98580a7db_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(11)\quad {\rm RHS}= \left[\begin{array}{cc} a_1 & 1 \\ 1 & 0 \end{array}\right] \left[\begin{array}{cc} 0 & 1 \\ -a_2 & -a_1 \end{array}\right] = \left[\begin{array}{cc} -a_2 & 0 \\ 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-69a8e389f689698fe612c264f9f8f2a3_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(12)\quad \begin{array}{l} {\rm LHS}=\\ \left[\begin{array}{cc} 0_{1\times n-1} & -a_n \\ I_{n-1\times n-1} & \left[\begin{array}{c} -a_{n-1} \\ \vdots\\ -a_1 \end{array}\right] \end{array}\right] \left[\begin{array}{cccc|c} a_{n-1} & a_{n-2} & \cdots & a_1 & 1 \\ a_{n-2} & a_{n-3} & \cdots & 1 & 0 \\ \vdots & \vdots & \cdots & \vdots & \vdots \\ a_1 & 1 & \cdots & 0 & 0 \\\hline 1 & 0 & \cdots & 0 & 0 \end{array}\right]\\ = \left[\begin{array}{cccc|c} -a_n & 0 & \cdots & 0 & 0 \\\hline 0 & a_{n-2} & \cdots & a_1 & 1 \\ 0 & a_{n-3} & \cdots & 1 & 0 \\ \vdots & \vdots & \cdots & \vdots & \vdots \\ 0 & 1 & \cdots & 0 & 0 \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-19724dd9a4d938871edbfcd49d9674ac_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(13)\quad \begin{array}{l} {\rm RHS}=\\ \left[\begin{array}{cccc|c} a_{n-1} & a_{n-2} & \cdots & a_1 & 1 \\ a_{n-2} & a_{n-3} & \cdots & 1 & 0 \\ \vdots & \vdots & \cdots & \vdots & \vdots \\ a_1 & 1 & \cdots & 0 & 0 \\\hline 1 & 0 & \cdots & 0 & 0 \end{array}\right] \left[\begin{array}{cc} 0_{n-1\times 1} & I_{n-1\times n-1} \\ -a_n & \left[\begin{array}{ccc} -a_{n-1} & \cdots & -a_1 \end{array}\right] \end{array}\right]\\ = \left[\begin{array}{c|cccc} -a_n & 0 & \cdots & 0 & 0 \\ 0 & a_{n-2} & \cdots & a_1 & 1 \\ 0 & a_{n-3} & \cdots & 1 & 0 \\ \vdots & \vdots & \cdots & \vdots & \vdots \\\hline 0 & 1 & \cdots & 0 & 0 \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ff97f31f2cbd01f24fdf56d95b63fc41_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(14)\quad \boxed{ \begin{array}{l} A_2=T_2A_1T_2^{-1}= \left[\begin{array}{ccccc} 0 & 1 & \cdots & 0\\ \vdots & \vdots & \cdots & \vdots \\ 0 & 0 & \cdots & 1\\ -a_n & -a_{n-1} & \cdots & -a_1 \end{array}\right]\\ B_2=T_2B_1= \left[\begin{array}{cc} 0 \\ \vdots\\ 0\\ 1 \end{array}\right] \end{array}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ce6be79123d0d41f08f5578f356f1fc8_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(16)\quad F_2=\left[\begin{array}{ccccc} a_n'-a_n & a_{n-1}'-a_{n-1} & \cdots & a_1'-a_1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8bb5e20b60571403bb0a0e5cc5bff21c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(17)\quad \begin{array}{l} A= \left[\begin{array}{ccc} 0 & 7 & 4 \\ 1 & -1 & -2\\ 0 & 3 & 1 \end{array}\right],\ B= \left[\begin{array}{cc} 1 & 0 \\ 0 & 0 \\ 0 & 1 \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-eb613b4ad7959f598c2311a3efa6522d_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(18)\quad \begin{array}{l} {\rm rank} \left[\begin{array}{ccc} B & AB & A^2B \end{array}\right]= {\rm rank}\ \left[\begin{array}{cc|cc|cc} 1 & 0 & 0 & 4 & 7 & -10\\ 0 & 0 & 1 & -2 & -1 & 4\\ 0 & 1 & 0 & 1 & 3 & 5 \end{array}\right]=3 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-778441ef0b082221824194bd7f62be96_l3.png "Rendered by QuickLaTeX.com")
 の第1列ベクトルと第2ベクトルをそれぞれ
の第1列ベクトルと第2ベクトルをそれぞれ と
と で表すとき、
で表すとき、


 に対して、
に対して、 が1次従属となる最小の
が1次従属となる最小の を可制御性指数と呼びます。まず
を可制御性指数と呼びます。まず については、次式より
については、次式より となります。
となります。![\displaystyle{(22)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} 7 \\ -1 \\ 3 \end{array}\right] }_{A^2B_1} = \underbrace{7}_{\alpha_{110}} \underbrace{ \left[\begin{array}{c} 1 \\ 0 \\ 0 \end{array}\right] }_{B_1} +\underbrace{(-1)}_{\alpha_{111}} \underbrace{ \left[\begin{array}{c} 0 \\ 1 \\ 0 \end{array}\right] }_{AB_1} +\underbrace{3}_{\alpha_{120}} \underbrace{ \left[\begin{array}{c} 0 \\ 0 \\ 1 \end{array}\right] }_{B_2} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a3ced55d0387a8aca744280338c5e6a1_l3.png "Rendered by QuickLaTeX.com")
 については、次式より
については、次式より となります。
となります。![\displaystyle{(23)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} 4 \\ -2 \\ 1 \end{array}\right] }_{AB_2} = \underbrace{4}_{\alpha_{210}} \underbrace{ \left[\begin{array}{c} 1 \\ 0 \\ 0 \end{array}\right] }_{B_1} +\underbrace{(-2)}_{\beta_{21}} \underbrace{ \left[\begin{array}{c} 0 \\ 1 \\ 0 \end{array}\right] }_{AB_1} +\underbrace{1}_{\alpha_{220}} \underbrace{ \left[\begin{array}{c} 0 \\ 0 \\ 1 \end{array}\right] }_{B_2} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c63e0b1e9096a4bd9c5fbf5321eee21e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(24)\quad \begin{array}{l} A \underbrace{ \left[\begin{array}{ccc} B_1 & AB_1 & B_2 \end{array}\right] }_{T_1^{-1}} =\underbrace{ \left[\begin{array}{ccc} B_1 & AB_1 & B_2 \end{array}\right] }_{T_1^{-1}} \underbrace{ \left[\begin{array}{ccc} 0 & \alpha_{110} & \alpha_{210} \\ 1 & \alpha_{111} & \beta_{21}\\ 0 & \alpha_{120} & \alpha_{220} \end{array}\right] }_{A_1}\\ &&B= \underbrace{ \left[\begin{array}{ccc} B_1 & AB_1 & B_2 \end{array}\right] }_{T_1^{-1}} \underbrace{ \left[\begin{array}{cc} 1 & 0 \\ 0 & 0 \\ 0 & 1 \end{array}\right] }_{B_1} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-23bf562ea179dfd172e768b601e987e8_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(25)\quad \begin{array}{l} A_1=T_1AT_1^{-1}= \left[\begin{array}{ccc} 0 & \alpha_{110} & \alpha_{210} \\ 1 & \alpha_{111} & \beta_{21}\\ 0 & \alpha_{120} & \alpha_{220} \end{array}\right] =\left[\begin{array}{ccc} 0 & 7 & 4 \\ 1 & -1 & -2\\ 0 & 3 & 1 \end{array}\right]\\ & B_1=T_1B= \left[\begin{array}{cc} 1 & 0 \\ 0 & 0 \\ 0 & 1 \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-88db77c1df02bff109ddfadff44909d0_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(26)\quad \begin{array}{l} &&\underbrace{ \left[\begin{array}{cc|c} 0 & \alpha_{110} & \alpha_{210} \\ 1 & \alpha_{111} & \beta_{21}\\\hline 0 & \alpha_{120} & \alpha_{220} \end{array}\right] }_{A_1} \underbrace{ \left[\begin{array}{cc|c} -\alpha_{111} & 1 & -\beta_{21} \\ 1 & 0 & 0\\\hline 0 & 0 & 1 \end{array}\right] }_{T_2^{-1}}\\ &=\underbrace{ \left[\begin{array}{cc|c} -\alpha_{111} & 1 & -\beta_{21} \\ 1 & 0 & 0\\\hline 0 & 0 & 1 \end{array}\right] }_{T_2^{-1}} \underbrace{ \left[\begin{array}{cc|c} 0 & 1 & 0 \\ \alpha_{110}+\beta_{21}\alpha_{120} & \alpha_{111} & \alpha_{210}+\beta_{21}\alpha_{220}\\\hline \alpha_{120} & 0 & \alpha_{220} \end{array}\right] }_{A_2} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2373ee4453ef9f5ca62b357ea4f5af85_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(27)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{cc|c} 0 & 7 & 4 \\ 1 & -1 & -2\\\hline 0 & 3 & 1 \end{array}\right] }_{A_1} \underbrace{ \left[\begin{array}{cc|c} 1 & 1 & 2 \\ 1 & 0 & 0\\\hline 0 & 0 & 1 \end{array}\right] }_{T_2^{-1}} =\underbrace{ \left[\begin{array}{cc|c} 1 & 1 & 2 \\ 1 & 0 & 0\\\hline 0 & 0 & 1 \end{array}\right] }_{T_2^{-1}} \underbrace{ \left[\begin{array}{cc|c} 0 & 1 & 0 \\ 1 & -1 & 2\\\hline 3 & 0 & 1 \end{array}\right] }_{A_2} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-81ad23e553d3ac1f2251a084315e5637_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(28)\quad \begin{array}{l} {\rm LHS}= \left[\begin{array}{ccc} 0 & \alpha_{110} & \alpha_{210} \\ 1 & \alpha_{111} & \beta_{21}\\ 0 & \alpha_{120} & \alpha_{220} \end{array}\right] \left[\begin{array}{ccc} -\alpha_{111} & 1 & -\beta_{21} \\ 1 & 0 & 0\\ 0 & 0 & 1 \end{array}\right]\\ &= \left[\begin{array}{ccc} \alpha_{110} & 0 & \alpha_{210} \\ 0 & 1 & 0 \\ \alpha_{120} & 0 & \alpha_{220} \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ff6b2af74632e3a4fd169e0966ea8151_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(29)\quad \begin{array}{l} {\rm RHS}=\\ & \left[\begin{array}{ccc} -\alpha_{111} & 1 & -\beta_{21} \\ 1 & 0 & 0\\ 0 & 0 & 1 \end{array}\right] \left[\begin{array}{ccc} 0 & 1 & 0 \\ \alpha_{110}+\beta_{21}\alpha_{120} & \alpha_{111} & \alpha_{210}+\beta_{21}\alpha_{220}\\ \alpha_{120} & 0 & \alpha_{220} \end{array}\right]\\ &= \left[\begin{array}{ccc} \alpha_{110} & 0 & \alpha_{210} \\ 0 & 1 & 0 \\ \alpha_{120} & 0 & \alpha_{220} \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-dc856f38b38aa12a6681d314436326e4_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(30)\quad \begin{array}{l} &A_2=T_2A_1T_2^{-1}= \left[\begin{array}{ccc} 0 & 1 & 0 \\ 1 & -1 & 2\\ 3 & 0 & 1 \end{array}\right]\\ & B_2=T_2B_1= \left[\begin{array}{cc} 0 & 0 \\ 1 & -2 \\ 0 & 1 \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d09264d70c8d356c3673229affb13c0e_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(32)\quad \begin{array}{l} &A_0= \left[\begin{array}{ccc} 0 & 1 & 0 \\ 0 & 0 & 0\\ 0 & 0 & 0 \end{array}\right],\ B_0= \left[\begin{array}{cc} 0 & 0 \\ 1 & 0 \\ 0 & 1 \end{array}\right]\\ &F_0= \left[\begin{array}{cc|c} \alpha_{110} & \alpha_{111} & \alpha_{210}\\\hline \alpha_{120} & 0 & \alpha_{220} \end{array}\right] = \left[\begin{array}{cc|c} 7 & -1 & 4\\\hline 3 & 0 & 1 \end{array}\right]\\ &&G_0= \left[\begin{array}{cc} 1 & -\beta_{21} \\ 0 & 1 \end{array}\right] = \left[\begin{array}{cc} 1 & 2 \\ 0 & 1 \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f7fac589e781be176791d6411cfa2b6f_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(34)\quad \begin{array}{l} F_2=F_0+ \left[\begin{array}{ccccc} a_2' & a_1' & 0\\ 0 & 0 & a_3' \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-107ecc82844bf60b97405c743677fcba_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(35)\quad \begin{array}{l} A_2-B_2F_2= \left[\begin{array}{ccc} 0 & 1 & 0 \\ -a_2' & -a_1' & 0\\ 0 & 0 & -a_3' \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b1fda1f343ed6a79a8ad37d75b7bcfa5_l3.png "Rendered by QuickLaTeX.com")
 番目の列ベクトルを
番目の列ベクトルを と表すとき
と表すとき


![\displaystyle{(39)\quad \begin{array}{l} A^{n_i}B_i=\sum_{j=1}^{m} \left[\begin{array}{ccc} B_j\ \cdots\ A^{n_j-1}B_j \end{array}\right]\alpha_{ij} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9f969d35394aa2c7271e118b546fe7f0_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(40)\quad \begin{array}{l} \alpha_{ij}= \left\{\begin{array}{l} \left[\begin{array}{c} \alpha_{ij0} \\ \vdots \\ \alpha_{ij,n_j-1} \end{array}\right]\ (n_j\le n_i)\\ \left[\begin{array}{c} \alpha_{ij0} \\ \vdots \\ \alpha_{ij,n_i-1}\\ \beta_{ij} \\ 0_{n_j-n_i-1\times 1} \\ \end{array}\right]\ (j<i, n_j>n_i)\\ \left[\begin{array}{c} \alpha_{ij0} \\ \vdots \\ \alpha_{ij,n_i-1}\\ 0 \\ 0_{n_j-n_i-1\times 1} \\ \end{array}\right]\ (j>i, n_j>n_i) \end{array}\right. \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c23ae84821c038972864db04da0214c9_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(41)\quad \begin{array}{l} A \underbrace{ \left[\begin{array}{c|c|c} B_1\ \cdots\ A^{n_1-1}B_1 & \cdots & B_m\ \cdots\ A^{n_m-1}B_m \end{array}\right] }_{T_1^{-1}}\\ =\underbrace{ \left[\begin{array}{c|c|c} B_1\ \cdots\ A^{n_1-1}B_1 & \cdots & B_m\ \cdots\ A^{n_m-1}B_m \end{array}\right] }_{T_1^{-1}}\\ \times \underbrace{ \left[\begin{array}{c|c|c} \begin{array}{c|c} \begin{array}{c} 0_{1\times n_1-1} \\ I_{n_1-1} \end{array} & \alpha_{11} \end{array} &\cdots & \begin{array}{c|c} 0_{n_1\times n_m-1} & \alpha_{m1} \end{array} \\\hline \vdots & \cdots & \vdots \\\hline \begin{array}{c|c} 0_{n_m\times n_1-1} & \alpha_{1m} \end{array} & \cdots & \begin{array}{c|c} \begin{array}{c} 0_{1\times n_m-1} \\ I_{n_m-1} \end{array} & \alpha_{mm} \end{array} \end{array}\right] }_{A_1}\\ B= \underbrace{ \left[\begin{array}{c|c|c} B_1\ \cdots\ A^{n_1-1}B_1 & \cdots & B_m\ \cdots\ A^{n_m-1}B_m \end{array}\right] }_{T_1^{-1}}\\ \times \underbrace{ \left[\begin{array}{c|c|c} \begin{array}{c} 1 \\ 0_{n_1-1\times1} \end{array} &\cdots & 0_{n_1\times1} \\\hline \vdots & \cdots & \vdots \\\hline 0_{n_m\times1} & \cdots & \begin{array}{c} 1 \\ 0_{n_m-1\times1} \end{array} \end{array}\right] }_{B_1} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ba8411b7aefa63e3beacc9f736d8a5d3_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(42)\quad \boxed{ \begin{array}{l} A_1=T_1AT_1^{-1}= \left[\begin{array}{c|c|c} \begin{array}{c|c} \begin{array}{c} 0_{1\times n_1-1} \\ I_{n_1-1} \end{array} & \alpha_{11} \end{array} &\cdots & \begin{array}{c|c} 0_{n_1\times n_m-1} & \alpha_{m1} \end{array} \\\hline \vdots & \cdots & \vdots \\\hline \begin{array}{c|c} 0_{n_m\times n_1-1} & \alpha_{1m} \end{array} & \cdots & \begin{array}{c|c} \begin{array}{c} 0_{1\times n_m-1} \\ I_{n_m-1} \end{array} & \alpha_{mm} \end{array} \end{array}\right]\\ B_1=T_1B= \left[\begin{array}{c|c|c} \begin{array}{c} 1 \\ 0_{n_1-1\times1} \end{array} &\cdots & 0_{n_1\times1} \\\hline \vdots & \ddots & \vdots \\\hline 0_{n_m\times1} & \cdots & \begin{array}{c} 1 \\ 0_{n_m-1\times1} \end{array} \end{array}\right] \end{array}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8e4adc89f2c6c1dc40584401f4d58d65_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(43)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c|c|c} \begin{array}{c|c} \begin{array}{c} 0_{1\times n_1-1} \\ I_{n_1-1} \end{array} & \alpha_{11} \end{array} &\cdots & \begin{array}{c|c} 0_{n_1\times n_m-1} & \alpha_{m1} \end{array} \\\hline \vdots & \cdots & \vdots \\\hline \begin{array}{c|c} 0_{n_m\times n_1-1} & \alpha_{1m} \end{array} & \cdots & \begin{array}{c|c} \begin{array}{c} 0_{1\times n_m-1} \\ I_{n_m-1} \end{array} & \alpha_{mm} \end{array} \end{array}\right] }_{A_1}\\ \times \underbrace{ \left[\begin{array}{ccc} L_{11} & \cdots & L_{m1} \\ \vdots & \cdots & \vdots \\ L_{1m} & \cdots & L_{mm} \end{array}\right] }_{T_2^{-1}} =\underbrace{ \left[\begin{array}{ccc} L_{11} & \cdots & L_{m1} \\ \vdots & \cdots & \vdots \\ L_{1m} & \cdots & L_{mm} \end{array}\right] }_{T_2^{-1}} \underbrace{ (A_0+B_0G_0^{-1}F_0) }_{A_2} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4fd1e3c6e397b538020d3db0dace632d_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(44)\quad \begin{array}{l} L_{ii}=-\left[\begin{array}{ccc} S_{n_i}\alpha_{ii} & \cdots & S_{n_i}^{n_i}\alpha_{ii} \end{array}\right]+J_{n_1}\\ L_{ij}=-\left[\begin{array}{ccc} S_{n_j}\alpha_{ij} & \cdots & S_{n_j}^{n_i}\alpha_{ij} \end{array}\right]\\ S_\nu= \left[\begin{array}{cc} 0_{\nu-1\times 1} & I_{\nu-1}\\ 0 & 0_{1\times\nu-1} \end{array}\right] \\ J_\nu= \left[\begin{array}{ccc} 0 & \cdots & 1 \\ \vdots & \cdot & \vdots \\ 1 & \cdots & 0 \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2e418066db7cccbf51e4cc7658f79c17_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(45)\quad \begin{array}{l} A_0= \left[\begin{array}{c|c|c} S_{n_1} & \cdots & 0_{n_1\times n_m} \\\hline \vdots & \ddots & \vdots \\\hline 0_{n_m\times n_1} & \cdots & S_{n_m} \end{array}\right]\\ B_0= \left[\begin{array}{c|c|c} \begin{array}{c} 0_{n_1-1\times 1} \\ 1 \end{array} & \cdots & 0_{n_1\times1} \\\hline \vdots & \ddots & \vdots \\\hline 0_{n_m\times1} & \cdots & \begin{array}{c} 0_{n_m-1\times 1} \\ 1 \end{array} \end{array}\right]\\ F_0= \left[\begin{array}{ccc|c|ccc} \bar\alpha_{110} & \cdots & \bar\alpha_{11,n_1-1} & \cdots & \bar\alpha_{m10} & \cdots & \bar\alpha_{m1,n_m-1}\\ \vdots & \cdots & \vdots & \cdots & \vdots & \cdots & \vdots \\ \bar\alpha_{1m0} & \cdots & \bar\alpha_{1m,n_1-1} & \cdots & \bar\alpha_{mm0} & \cdots & \bar\alpha_{mm,n_m-1}\\ \end{array}\right]\\ \bar\alpha_{ijk}= \left\{\begin{array}{ll} \alpha_{ijk} & (k\verb|<| n_j)\\ 0 & (k\ge n_j)\end{array}\right.\\ G_0=\left[\begin{array}{cccl} 1&\bar\beta_{21}&\cdots&\bar\beta_{m1}\\ 0&1&\ddots&\vdots\\ \vdots&\ddots&\ddots&\bar\beta_{m,m-1}\\ 0&0&\cdots&1\end{array}\right]\\ \bar\beta_{ij}=\left\{\begin{array}{ll} -\beta_{ij} &(n_j\ge n_i)\\ 0 &(n_j\verb|<|n_i) \end{array}\right. \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-32b1c40783488872664cb189555fb1d7_l3.png "Rendered by QuickLaTeX.com")



 は正則行列)、状態方程式は次式となります。
は正則行列)、状態方程式は次式となります。






![\displaystyle{(10)\quad \begin{array}{ll} {\rm rank}\, [\begin{array}{cccc} \underbrace{TB}_{B'} & \underbrace{TAT^{-1}}_{A'}\underbrace{TB}_{B'} & \cdots & \underbrace{(TAT^{-1})^{n-1}}_{A'^{n-1}}\underbrace{TB}_{B'} \end{array}] \\ ={\rm rank}\, T[\begin{array}{cccc} B & AB &\cdots & A^{n-1}B \end{array}]\\ ={\rm rank}\, [\begin{array}{cccc} B & AB &\cdots & A^{n-1}B \end{array}] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-608b923e2c31088baa89055db8bbcf5f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(11)\quad \boxed{ \left[\begin{array}{c} \dot{x}_1'(t) \\ \dot{x}_2'(t) \end{array}\right] = \underbrace{ \left[\begin{array}{cc} A_{\#} & X \\ 0 & A_k \end{array}\right] }_{TAT^{-1}} \left[\begin{array}{c} x_1'(t) \\ x_2'(t) \end{array}\right] + \underbrace{ \left[\begin{array}{c} B_{\#} \\ 0 \end{array}\right] }_{TB} u(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d045d7f6e58128cfb562afcad80f28e6_l3.png "Rendered by QuickLaTeX.com")
 は可制御対とします。このブロック線図を描いてみればわかるように,状態
は可制御対とします。このブロック線図を描いてみればわかるように,状態 は入力
は入力 の影響を受けることはありません。したがって,可制御性は成立しないこと,そして
の影響を受けることはありません。したがって,可制御性は成立しないこと,そして が安定行列かどうかが可安定性と関係していることは想像がつくと思います。以下では,次の判定法が導かれること示します。
が安定行列かどうかが可安定性と関係していることは想像がつくと思います。以下では,次の判定法が導かれること示します。 の行列
の行列 の行列
の行列![\displaystyle{(12)\quad \left[\begin{array}{cc} T^TB & T^TAT \end{array}\right]= \left[\begin{array}{c|cccc|c} B_1 & A_1 & X & \cdots & X & X \\ 0 & B_2 & A_2 & \cdots & X & X \\ \vdots & & \ddots & \ddots & \vdots & \vdots \\ 0 & 0 & \cdots & B_{k-1} & A_{k-1} & X \\ \hline 0 & 0 & \cdots & 0 & B_k & A_k \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2b8e62783604bcf64eef31f4d8a42b0b_l3.png "Rendered by QuickLaTeX.com")
 は正整数,また
は正整数,また のサイズを
のサイズを とするとき(
とするとき( ),つぎが成り立つ(
),つぎが成り立つ( は横長の形状となり,行フルランクをもつ。また,
は横長の形状となり,行フルランクをもつ。また, は横長で,行フルランクをもつ行列または零行列のどちらかである。)。
は横長で,行フルランクをもつ行列または零行列のどちらかである。)。


 が可制御対であるための必要十分条件は
が可制御対であるための必要十分条件は
 のとき,
のとき, と読み替えれば明らかであろう。
と読み替えれば明らかであろう。
![{\rm rank}\, \left[\begin{array}{cccc} B & AB & \cdots & A^{n-1}B \end{array}\right]=n](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e0e816ee9de6e9a441f0a454cc5916b6_l3.png "Rendered by QuickLaTeX.com")
![{\rm rank}\, \left[\begin{array}{cc} B & A-\lambda I_n \end{array}\right] =n](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-dee3269841bf00dddf51d7c2a639251b_l3.png "Rendered by QuickLaTeX.com") (
( は
は (
( 条件C1
条件C1 条件C0
条件C0![\displaystyle{(16)\quad {\rm det}(\lambda I_n-T^TAT+T^TB\cdot FT) ={\rm det}\left(\lambda I_n- \left[\begin{array}{cc} X & X \\ 0 & A_k \end{array}\right] \right) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c0e9f601af39361d7f0a65f364233d29_l3.png "Rendered by QuickLaTeX.com")
![[\begin{array}{cc} T^TB & T^TAT-\lambda I_n \end{array}]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-aa92baa7927a47587fc4ef1434675b4f_l3.png "Rendered by QuickLaTeX.com") に,(12)を適用すると
に,(12)を適用すると![\displaystyle{(17)\quad \left[\begin{array}{c|cccc|c} B_1 & A_1-\lambda I_{m_1} & X & \cdots & X & X \\ 0 & B_2 & A_2-\lambda I_{m_2} & \cdots & X & X \\ \vdots & & \ddots & \ddots & \vdots & \vdots \\ 0 & 0 & \cdots & B_{k-1} & A_{k-1}-\lambda I_{m_{k-1}} & X \\ \hline 0 & 0 & \cdots & 0 & B_k & A_k-\lambda I_{m_k} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-07d18a8741d94acb1d81ddaf19f9a337_l3.png "Rendered by QuickLaTeX.com")
 は横長の形状となり,行フルランク(行数に等しい階数)をもつので
は横長の形状となり,行フルランク(行数に等しい階数)をもつので![\displaystyle{(18)\quad \left[\begin{array}{cc} T^TB & T^TAT-\lambda I_n \end{array}\right] = T^T \left[\begin{array}{cc} B & A-\lambda I_n \end{array}\right] \left[\begin{array}{cc} I_n & 0 \\ 0 & T \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-096716becfbccfaa7317d08b6bc7e591_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(19)\quad {\rm rank}\, [\begin{array}{cc} T^TB & T^TAT-\lambda I_n \end{array}] = {\rm rank}\, [\begin{array}{cc} B & A-\lambda I_n \end{array}] =n }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7b6b3be342ce17c5cbde4129dd5d266b_l3.png "Rendered by QuickLaTeX.com")
 を
を![\displaystyle{(20)\quad w^T\, [\begin{array}{cc} B & A-\lambda I_n \end{array}] =0 \Rightarrow w =0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-572c1b06b9d87643daa9d1e3cc645a49_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(23)\quad w^T\, [\begin{array}{ccccc} B & AB & \cdots & A^{n-1}B \end{array}] =0 \Rightarrow w =0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bc453424e1d3d04b1a7b8ce6c9467bf6_l3.png "Rendered by QuickLaTeX.com")
 ばかりでなく
ばかりでなく![\displaystyle{(24)\quad {\rm rank}\, \left. [\begin{array}{cc} B_k & A_k-\lambda I_{m_k} \end{array}] \right|_{B_k=0} = {\rm rank}\, [\begin{array}{cc} 0 & A_k-\lambda I_{m_k} \end{array}] \le m_k }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-02fc5a04c83a65b8a6fdd8e2de1d92b2_l3.png "Rendered by QuickLaTeX.com")


 とおく。
とおく。 の階数決定
の階数決定 を
を に更新し,
に更新し, に対して,つぎの特異値分解を行い,
に対して,つぎの特異値分解を行い, と
と を求める。
を求める。
![\displaystyle{(2)\quad \Sigma^{(j)}= \left[\begin{array}{cc} \Sigma_1^{(j)} & 0 \\ 0 & 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a79928b336591d941023ec661933d6ad_l3.png "Rendered by QuickLaTeX.com")
 または
または ならば,
ならば, と設定して終了する。そうでないときは,ステップ3へ行く。
と設定して終了する。そうでないときは,ステップ3へ行く。 を,
を,![\displaystyle{(3)\quad W^{(j)}= \left[\begin{array}{cc} I_s & 0 \\ 0 & U^{(j)} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-aff27c422709eff754d94a59c0f72646_l3.png "Rendered by QuickLaTeX.com")
 と
と を,次式から求める。
を,次式から求める。
 を
を に更新し,
に更新し, を得て,ステップ2へ戻る。
を得て,ステップ2へ戻る。![\displaystyle{(5)\quad A^{(j+1)}= \left[\begin{array}{ccc} X(s\times s-m_j) & X(s\times m_j) & X(s\times n-s) \\ 0 & B^{(j+1)} & X \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d5e912f6e06162aef2f3b10bc3d7aae0_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(6)\quad A= \left[\begin{array}{ccc} 0 & 0 & 0 \\ 0 & -1 & 1 \\ 0 & 0 & 0 \end{array}\right] ,\ B= \left[\begin{array}{cc} 1 & 0 \\ 0 & 1 \\ 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-474bab461a7a10da1d3931fc1fae01df_l3.png "Rendered by QuickLaTeX.com")
 とおく。
とおく。 とし,
とし, に対する特異値分解
に対する特異値分解![\displaystyle{(7)\quad B^{(1)}= \underbrace{ \left[\begin{array}{ccc} 0 & 1 & 1 \\ \frac{1}{\sqrt{2}} & 0 & -\frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}} & 0 & \frac{1}{\sqrt{2}} \end{array}\right] }_{U^{(1)}} \underbrace{ \left[\begin{array}{cc} \sqrt{2} & 0 \\ 0 & 1 \\ 0 & 0 \end{array}\right] }_{\Sigma^{(1)}} \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right]^T }_{V^{(1)T}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-46fba17a52676c6d9cace3cfbf263ce8_l3.png "Rendered by QuickLaTeX.com")
 と
と が求まる。
が求まる。 かつ
かつ なので,ステップ4へ行く。
なので,ステップ4へ行く。 とし,
とし, を求めると
を求めると![\displaystyle{(8)\quad A^{(2)}= \left[\begin{array}{cc|c} 0 & 0 & 1 \\ 0 & 0 & 0 \\ \hline 0 & 0 & -1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1562ebd0e8d3441e17c801dd71458311_l3.png "Rendered by QuickLaTeX.com")
 とする。
とする。 とする。
とする。 に対する分割から,
に対する分割から,![B^{(2)}= [\begin{array}{cc} 0 & 0 \end{array}]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-79996e5f09e2d74c06a7e58e93f9565e_l3.png "Rendered by QuickLaTeX.com") を得る。
を得る。 とする。
とする。 は零行列なので,その階数は
は零行列なので,その階数は である。
である。 のように設定する。
のように設定する。![\displaystyle{(9)\quad \begin{array}{l} \left[\begin{array}{cc} T^TB & T^TAT \end{array}\right]= \left[\begin{array}{ccc} B_1 & A_1 & X \\ 0 & B_2 & A_2 \end{array}\right]= \left[\begin{array}{cc|cc|c} 0 & \sqrt{2} & 0 & 0 & 1 \\ 1 & 0 & 0 & 0 & 0 \\ \hline 0 & 0 & 0 & 0 & -1 \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f8026f4008095d9ddb2549a401bee577_l3.png "Rendered by QuickLaTeX.com")
 より,条件S0が成り立つ。よって,
より,条件S0が成り立つ。よって, 階段化アルゴリズムのコードは次のように書ける。上の数値例で確かめよ。
階段化アルゴリズムのコードは次のように書ける。上の数値例で確かめよ。

![\boxed{{\rm rank}\, \left[\begin{array}{cccc} B & AB & \cdots & A^{n-1}B \end{array}\right]=n}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b34efec850436fd6613065b9b417bd5b_l3.png "Rendered by QuickLaTeX.com")
![\boxed{{\rm rank}\, \left[\begin{array}{cc} B & A-\lambda I_n \end{array}\right] =n}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c093b55423fad6ab40c48e359d81b335_l3.png "Rendered by QuickLaTeX.com") (
( を証明するのに、
を証明するのに、
 で可制御性グラミアン行列が正定でないとします。このとき,
で可制御性グラミアン行列が正定でないとします。このとき, が存在して
が存在して

 を
を に移すことを考えると
に移すことを考えると

 をかけると
をかけると
 のとき
のとき となり,矛盾が生じます。よって条件C1が成り立ちます。
となり,矛盾が生じます。よって条件C1が成り立ちます。 条件C1> (1)に対して,
条件C1> (1)に対して, において,入力を
において,入力を

 と計算されます。
と計算されます。
 は任意であるので、定義DCを得ていることになります。
は任意であるので、定義DCを得ていることになります。![{\displaystyle{(12)\quad w^T\, [\begin{array}{cccc} B & AB & \cdots & A^{n-1}B \end{array}]=0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c1787e8aeb3ee43f51752114f871e90c_l3.png "Rendered by QuickLaTeX.com")



 とおくと
とおくと
 も可制御対であることは次のように証明されます。
も可制御対であることは次のように証明されます。

 より
より

 を入力変数の個数、
を入力変数の個数、
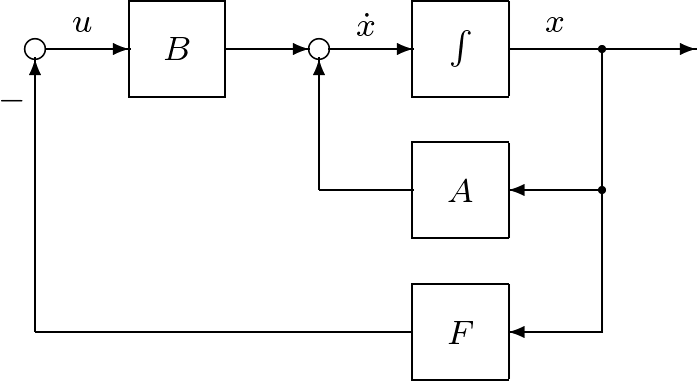 図1 状態フィードバックによる閉ループ系
図1 状態フィードバックによる閉ループ系 を与えて、行列方程式
を与えて、行列方程式

 を安定行列とする状態フィードバックが求まる条件の説明は次節で行いますが、ここではその準備として、状態フィードバックゲイン行列
を安定行列とする状態フィードバックが求まる条件の説明は次節で行いますが、ここではその準備として、状態フィードバックゲイン行列 の特性多項式を次式で表します。
の特性多項式を次式で表します。

![\displaystyle{(8)\quad \begin{array}{l} A_F^2+a_1'A_F+a_2'I_2=0\\ \quad\Downarrow\\ (A-BF)A_F+a_1'(A-BF)+a_2'I_2=0\\ \quad\Downarrow\\ AA_F-BFA_F+a_1'A-a_1'BF+a_2'I_2=0\\ \quad\Downarrow\\ A(A-BF)+a_1'A+a_2'I_2=BFA_F+a_1'BF\\ \quad\Downarrow\\ A^2+a_1'A+a_2'I_2=BF(A_F+a_1'I_2)+ABF\\ \quad\Downarrow\\ A^2+a_1'A+a_2'I_2=\left[\begin{array}{ccc} B &AB \end{array}\right] \left[\begin{array}{ccc} F(A_F+a_1'I_2)\\ F \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-58bb1c562247a773cc1edf865ae91cad_l3.png "Rendered by QuickLaTeX.com")
![\left[\begin{array}{ccc} B &AB \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0f32c921a49197dd0e4ea9561730a2ae_l3.png "Rendered by QuickLaTeX.com") が正則ならば、次の公式を得ます。
が正則ならば、次の公式を得ます。![\displaystyle{(9)\quad \boxed{F= \left[\begin{array}{ccc} 0 &1 \end{array}\right] \left[\begin{array}{ccc} B &AB \end{array}\right]^{-1} (A^2+a_1'A+a_2'I_2)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-578ce2e44f8051b3d1c0b0a39c1e6f83_l3.png "Rendered by QuickLaTeX.com")
 のとき、次のように書けます。
のとき、次のように書けます。![\displaystyle{(10)\quad \begin{array}{l} A_F^3+a_1'A_F^2+a_2'A_F+a_3'I_3=0\\ \quad\Downarrow\\ (A-BF)(A_F^2+a_1'A_F+a_2'I_3)+a_3'I_3=0\\ \quad\Downarrow\\ A(A_F^2+a_1'A_F+a_2'I_3)+a_3'I_3\\=BF(A_F^2+a_1'A_F+a_2'I_3)\\ \quad\Downarrow\\ A((A-BF)A_F+a_1'(A-BF)+a_2'I_3)+a_3'I_3\\=BF(A_F^2+a_1'A_F+a_2'I_3)\\ \quad\Downarrow\\ A^2(A-BF)+a_1'A^2+a_2'A+a_3'I_3\\ =BF(A_F^2+a_1'A_F+a_2'I_3)+ABF(A_F+a_1'I_3)\\ \quad\Downarrow\\ A^3+a_1'A^2+a_2'A+a_3'I_3\\ =BF(A_F^2+a_1'A_F+a_2'I_3)+ABF(A_F+a_1'I_3)+A^2BF\\ \quad\Downarrow\\ A^3+a_1'A^2+a_2'A+a_3'I_3\\ =\left[\begin{array}{ccc} B &AB&A^2B \end{array}\right] \left[\begin{array}{ccc} F(A_F^2+a_1'A_F+a_2'I_3)\\ F(A_F+a_1'I_3)\\ F \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2e1d5f3518704a7eb5ccf03446662208_l3.png "Rendered by QuickLaTeX.com")
![\left[\begin{array}{ccc} B &AB&A^2B \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-54cc2f261c5c13dabaff5e077679dd74_l3.png "Rendered by QuickLaTeX.com") が正則ならば、次の公式を得ます。
が正則ならば、次の公式を得ます。![\displaystyle{(11)\quad F= \left[\begin{array}{ccc} 0 &0 &1 \end{array}\right] \left[\begin{array}{ccc} B &AB&A^2B \end{array}\right]^{-1} (A^3+a_1'A^2+a_2'A+a_3'I_3) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-36a57e4f5c366420ae251082af56f67b_l3.png "Rendered by QuickLaTeX.com")
 の場合も同様にして、
の場合も同様にして、![\displaystyle{(12)\quad %\begin{array}{l} A^n+a'_1A^{n-1}+\cdots+a'_nI_n =\left[\begin{array}{cccc} B & AB &\cdots & A^{n-1}B \end{array}\right] \left[\begin{array}{ccc} X_{n-1}\\ \vdots\\ X_1\\ F \end{array}\right] %\end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1a417bf647a9f2f3adebc7f2a80b6017_l3.png "Rendered by QuickLaTeX.com")
 はサイズ
はサイズ![\left[\begin{array}{cccc} B & AB &\cdots & A^{n-1}B \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c8ee895bb582252d13d1ed6b75619c67_l3.png "Rendered by QuickLaTeX.com") が正則ならば、(12)の右辺の第2番目の行列の最下段にある
が正則ならば、(12)の右辺の第2番目の行列の最下段にある![\displaystyle{(13)\quad \boxed{\begin{array}{l} F= \left[\begin{array}{cccc} 0 & \cdots & 0 & 1 \end{array}\right] \left[\begin{array}{cccc} B & AB &\cdots & A^{n-1}B \end{array}\right]^{-1}\\ \times (A^n+a'_1A^{n-1}+\cdots+a'_nI_n) \end{array}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-fec91a15818dbf1db1e87f86c46972c1_l3.png "Rendered by QuickLaTeX.com")
 を仮定して
を仮定して
 が対角行列の場合、
が対角行列の場合、 に対応する固有ベクトルを
に対応する固有ベクトルを として
として![\displaystyle{(15)\quad A \underbrace{ \left[\begin{array}{ccc} v_1&\cdots&v_n \end{array}\right] }_{V} - \underbrace{ \left[\begin{array}{ccc} v_1&\cdots&v_n \end{array}\right] }_{V} \underbrace{ {\rm diag}\{\lambda_1',\cdots,\lambda_m'\} }_{\Lambda}=}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f713c0a44166d55c043b7674aa70b508_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{ccc} (A-\lambda_1'I_n)v_1&\cdots&(A-\lambda_n'I_n)v_n \end{array}\right] =B \underbrace{ \left[\begin{array}{ccc} g_1&\cdots&g_n \end{array}\right] }_{G} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-45cb9449a7fe73343e8cac6d1e693103_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(16)\quad \underbrace{ \left[\begin{array}{ccc} v_1&\cdots&v_n \end{array}\right] }_{V}= \left[\begin{array}{ccc} (A-\lambda_1'I_n)^{-1}Bg_1&\cdots&(A-\lambda_n'I_n)^{-1}Bg_n \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-96e014aa6a0b3cc12cb66b1f706ac441_l3.png "Rendered by QuickLaTeX.com")
 を、(15)の
を、(15)の が正則になるように与える。
が正則になるように与える。
 次のコードを実行し、
次のコードを実行し、
 と
と とします。また鉛直線からの傾きを
とします。また鉛直線からの傾きを とします。2本の棒は1つの軸に取り付けられており、自由に回転できるとします。この軸を左右に動かして回転トルクを与えるのですが、その結果として働くトルクをここでは
とします。2本の棒は1つの軸に取り付けられており、自由に回転できるとします。この軸を左右に動かして回転トルクを与えるのですが、その結果として働くトルクをここでは で表します。このとき運動方程式は次式となります。ただし、
で表します。このとき運動方程式は次式となります。ただし、 。
。
![\displaystyle{(2)\quad \begin{equation} \frac{d}{dt} \left[\begin{array}{c} \theta_1\\ \theta_2\\ \dot\theta_1\\ \dot\theta_2\\ \end{array}\right]= \left[\begin{array}{cccc} 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 1\\ a_1 & 0 & 0 & 0\\ 0 & a_2 & 0 & 0\\ \end{array}\right] \left[\begin{array}{c} \theta_1\\ \theta_2\\ \dot\theta_1\\ \dot\theta_2\\ \end{array}\right]+ \left[\begin{array}{c} 0\\ 0\\ b_1\\ b_2\\ \end{array}\right]\tau }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3a3fa72bbe74de9a255bf87116b40789_l3.png "Rendered by QuickLaTeX.com")
 、
、 。
。![\displaystyle{(3)\quad F= \left[\begin{array}{cccc} 0 & \cdots & 0 & 1 \end{array}\right] %\underbrace{ \left[\begin{array}{cccc} B & AB &\cdots & A^{n-1}B \end{array}\right]^{-1} %}_{可制御性行列} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-604a38d9abbd299654fb932966584be6_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(4)\quad \begin{equation} \left[\begin{array}{cccc} B & AB & A^2B & A^3B \end{array}\right] = \left[\begin{array}{cccc} 0 &b_1 &0 &a_1b_1\\ 0 &b_2 &0 &a_2b_2\\ b_1&0 &a_1b_1 &0\\ b_2&0 &a_2b_2 &0\\ \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c96e667021ae4a5a4f1f35e8b5fc078e_l3.png "Rendered by QuickLaTeX.com")
 となる場合は、第1行と第2行が同じとなり、第3行と第4行も同じとなり、正則性は失われます。これから全く同じ2本の棒の棒立ては成功しないと考えられます。これは「二兎を追うものは一兎も得ず」のことわざ通りですね。
となる場合は、第1行と第2行が同じとなり、第3行と第4行も同じとなり、正則性は失われます。これから全く同じ2本の棒の棒立ては成功しないと考えられます。これは「二兎を追うものは一兎も得ず」のことわざ通りですね。![\displaystyle{(1a)\quad \underbrace{ \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{x}_2(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{cc} 0 & 1\\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{cc} 0 \\ K\omega_n^2 \end{array}\right] }_{B} u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2c38bce5a54dbe22b2c1cfbb9ac7882a_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(1b)\quad y(t)= \underbrace{ \left[\begin{array}{cc} 1 & 0 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f5e291f6df4bf13c895efeb7714483d4_l3.png "Rendered by QuickLaTeX.com")
 とします。また以下では簡単のため
とします。また以下では簡単のため とします。このときインパルス応答は、次式で与えられました。
とします。このときインパルス応答は、次式で与えられました。





 とすると
とすると

 の絶対値と偏角となっています。
の絶対値と偏角となっています。 をゲイン、
をゲイン、 を位相と呼びます。このゲイン線図と位相線図をペアにして片対数グラフにプロットしたものをボード線図と呼びます。ゲインはdb値(
を位相と呼びます。このゲイン線図と位相線図をペアにして片対数グラフにプロットしたものをボード線図と呼びます。ゲインはdb値( )、位相はdeg値(
)、位相はdeg値( )です。
)です。 のとき、ボード線図を描いてみると次のグラフが得られます
のとき、ボード線図を描いてみると次のグラフが得られます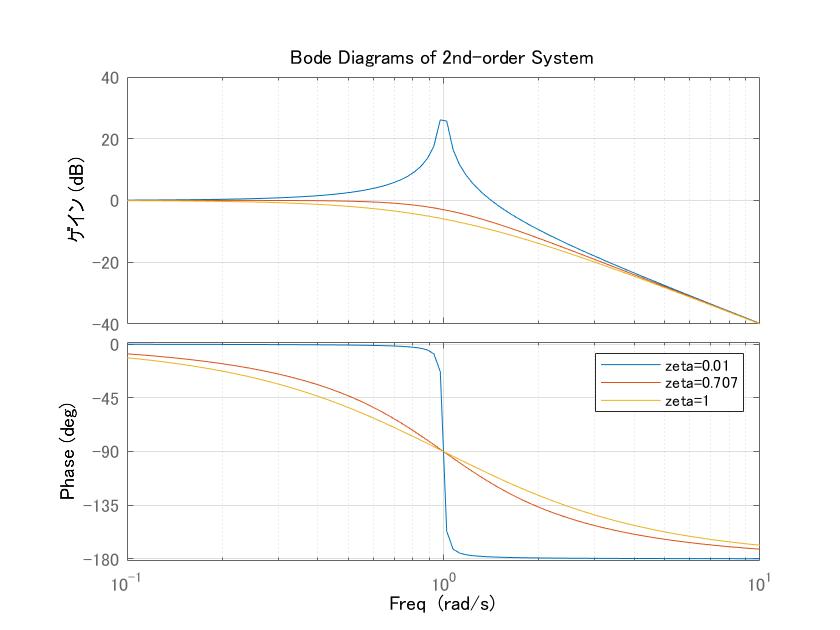 図1 2次系の周波数応答の比較
図1 2次系の周波数応答の比較

 がついていることに注意してください。
がついていることに注意してください。 を満足する
を満足する は
は



 を求めて、減衰係数と固有角周波数
を求めて、減衰係数と固有角周波数 が得られることを示しています。
が得られることを示しています。 を満足する帯域幅
を満足する帯域幅 は次のように計算されます。
は次のように計算されます。
 とおくと
とおくと





![(5)\quad \begin{array}{l} \displaystyle{y(t)=\int_0^tC\exp(A(t-\tau))Be^{j\omega\tau}d\tau}\\ \displaystyle{=C\exp(At)\int_0^te^{j\omega\tau}\exp(-A\tau)Bd\tau}\\ \displaystyle{=C\exp(At)\int_0^t\exp(j\omega\tau I_n)\exp(-A\tau)Bd\tau}\\ \displaystyle{=C\exp(At)\int_0^t\exp((j\omega I_n-A)\tau)Bd\tau}\\ \displaystyle{=C\exp(At) \left[\frac{}{}\exp((j\omega I_n-A)\tau)\right]_0^t(j\omega I_n-A)^{-1}B}\\ \displaystyle{=C\exp(At) (\exp((j\omega I_n-A)t)-I_n)(j\omega I_n-A)^{-1}B}\\ \displaystyle{=-C\exp(At)(j\omega I_n-A)^{-1}B+C\exp(At)\exp(j\omega t I_n)\exp(-At)(j\omega I_n-A)^{-1}B}\\ \displaystyle{=-C\exp(At)(j\omega I_n-A)^{-1}B+C(j\omega I_n-A)^{-1}Be^{j\omega t}} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-cf72e1d083b5093019ffc1a9ae42a3ca_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(1a)\quad \underbrace{ \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{x}_2(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{cc} 0 & 1\\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{cc} 0 \\ \omega_n^2 \end{array}\right] }_{B} u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b716bd0f77f40c082b3d8efd7314fe4f_l3.png "Rendered by QuickLaTeX.com")




![(5)\quad \begin{array}{l} \displaystyle{y(t)=\int_0^t\frac{\omega_n^2}{\lambda_I}e^{\lambda_R(t-\tau)}\sin\lambda_I(t-\tau)\sin\omega\tau\,d\tau}\\ \displaystyle{=\frac{\omega_n^2}{\lambda_I}e^{\lambda_Rt}\sin\lambda_It\int_0^te^{-\lambda_R\tau}\sin\omega\tau\cos\lambda_I\tau\,d\tau}\\ \displaystyle{-\frac{\omega_n^2}{\lambda_I}e^{\lambda_Rt}\cos\lambda_It\int_0^te^{-\lambda_R\tau}\sin\omega\tau\sin\lambda_I\tau\,d\tau}\\ \displaystyle{=\frac{\omega_n^2}{\lambda_I}e^{\lambda_Rt}\sin\lambda_It\times}\\ \displaystyle{(\left[\frac{e^{-\lambda_R\tau}(-\lambda_R\sin(\omega+\lambda_I)\tau-(\omega+\lambda_I)\cos(\omega+\lambda_I)\tau)}{2(\lambda_R^2+(\omega+\lambda_I)^2)}\right.}\\ \displaystyle{+\left.\frac{e^{-\lambda_R\tau}(-\lambda_R\sin(\omega-\lambda_I)\tau-(\omega-\lambda_I)\cos(\omega-\lambda_I)\tau)}{2(\lambda_R^2+(\omega-\lambda_I)^2)}\right]_0^t)}\\ \displaystyle{-\frac{\omega_n^2}{\lambda_I}e^{\lambda_Rt}\cos\lambda_It\times}\\ \displaystyle{(\left[-\frac{e^{-\lambda_R\tau}(-\lambda_R\cos(\omega+\lambda_I)\tau+(\omega+\lambda_I)\sin(\omega+\lambda_I)\tau)}{2(\lambda_R^2+(\omega+\lambda_I)^2)}\right.}\\ \displaystyle{+\left.\frac{e^{-\lambda_R\tau}(-\lambda_R\cos(\omega-\lambda_I)\tau+(\omega-\lambda_I)\sin(\omega-\lambda_I)\tau)}{2(\lambda_R^2+(\omega-\lambda_I)^2)^2}\right]_0^t)}\\ \displaystyle{=\frac{\omega_n^2}{\lambda_I}e^{\lambda_Rt}\sin\lambda_It\times}\\ \displaystyle{(\frac{e^{-\lambda_Rt}(-\lambda_R\sin(\omega+\lambda_I)t-(\omega+\lambda_I)\cos(\omega+\lambda_I)t)+\omega+\lambda_I}{2(\lambda_R^2+(\omega+\lambda_I)^2)}}\\ \displaystyle{+\frac{e^{-\lambda_Rt}(-\lambda_R\sin(\omega-\lambda_I)t-(\omega-\lambda_I)\cos(\omega-\lambda_I)t)+\omega-\lambda_I}{2(\lambda_R^2+(\omega-\lambda_I)^2)})}\\ \displaystyle{-\frac{\omega_n^2}{\lambda_I}e^{\lambda_Rt}\cos\lambda_It\times}\\ \displaystyle{(\frac{-e^{-\lambda_Rt}(-\lambda_R\cos(\omega+\lambda_I)t+(\omega+\lambda_I)\sin(\omega+\lambda_I)t)-\lambda_R}{2(\lambda_R^2+(\omega+\lambda_I)^2)}}\\ \displaystyle{+\frac{e^{-\lambda_Rt}(-\lambda_R\cos(\omega-\lambda_I)t+(\omega-\lambda_I)\sin(\omega-\lambda_I)t)+\lambda_R}{2(\lambda_R^2+(\omega-\lambda_I)^2)})} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0862d7bcce2485ad411ad20ffd65abfd_l3.png "Rendered by QuickLaTeX.com")












 で表すとき、第
で表すとき、第 から第
から第 までの時間応答は
までの時間応答は
 は(1)のインパルス応答行列の
は(1)のインパルス応答行列の 要素で、次のように与えられます。
要素で、次のように与えられます。


![\displaystyle{(6a)\quad \underbrace{ \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{x}_2(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{cc} 0 & 1\\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{cc} 0 \\ K\omega_n^2 \end{array}\right] }_{B} u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-163123fac605973ff5bb7e352fe8a4e4_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(6b)\quad y(t)= \underbrace{ \left[\begin{array}{cc} 1 & 0 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c9800fcc5420d0c26c37f1aa628b4db9_l3.png "Rendered by QuickLaTeX.com")
 を計算すると、
を計算すると、 、
、 に応じて、それぞれ次に示すようになります。
に応じて、それぞれ次に示すようになります。
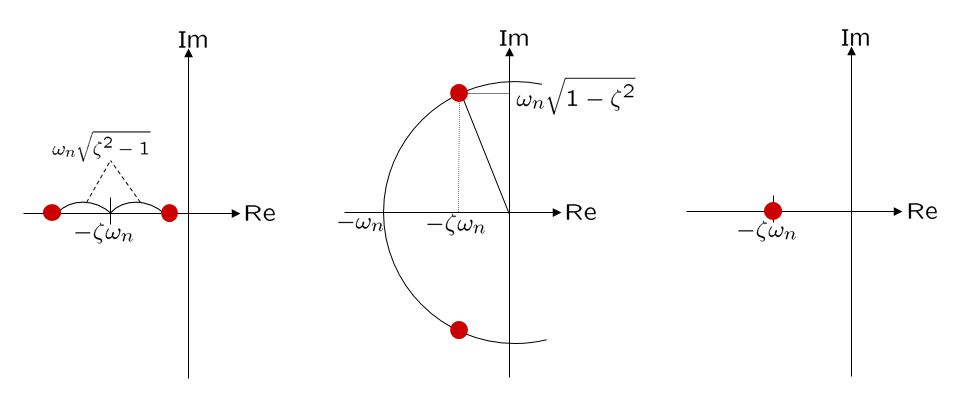 図1
図1 ![A=\left[\begin{array}{cc} 0 & 1\\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d70c5af2ff571c6c6893388008f08cdf_l3.png "Rendered by QuickLaTeX.com") の固有値分布
の固有値分布 とおくと、インパルス応答とステップ応答はそれぞれ次式で与えられます。
とおくと、インパルス応答とステップ応答はそれぞれ次式で与えられます。

![(9)\quad \begin{array}{l} \displaystyle{S(t)=\int_0^tG(\tau)d\tau=\int_0^t\frac{\lambda_1 \lambda_2}{\lambda_2-\lambda_1}(e^{\lambda_2\tau}-e^{\lambda_1\tau})d\tau}\\ \displaystyle{= \frac{\lambda_1 \lambda_2}{\lambda_2-\lambda_1}\left[\frac{e^{\lambda_2\tau}}{\lambda_2}-\frac{e^{\lambda_1\tau}}{\lambda_1}\right]_0^t}\\ \displaystyle{=\frac{\lambda_1 \lambda_2}{\lambda_2-\lambda_1}(\frac{e^{\lambda_2t}}{\lambda_2}-\frac{e^{\lambda_1t}}{\lambda_1})-\frac{\lambda_1 \lambda_2}{\lambda_2-\lambda_1}(\frac{1}{\lambda_2}-\frac{1}{\lambda_1})}\\ \displaystyle{=1+\frac{1}{\lambda_2-\lambda_1}(\lambda_1e^{\lambda_2t}-\lambda_2e^{\lambda_1t})} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-71159c7ee47771d4db9ea63f64ac8347_l3.png "Rendered by QuickLaTeX.com")
 とおくと、インパルス応答とステップ応答はそれぞれそれぞれ次式で与えられます。
とおくと、インパルス応答とステップ応答はそれぞれそれぞれ次式で与えられます。


![(12)\quad \begin{array}{l} \displaystyle{S(t)=\int_0^tG(\tau)d\tau=\int_0^t\frac{\omega_n^2}{\lambda_I}e^{\lambda_R\tau}\sin\lambda_I \tau d\tau}\\ \displaystyle{=\frac{\omega_n^2}{\lambda_I}\left[ \frac{e^{\lambda_R\tau}}{\lambda_R^2+\lambda_I^2}(\lambda_R\sin\lambda_I\tau-\lambda_I\cos\lambda_I\tau)\right]_0^t}\\ \displaystyle{=\frac{\omega_n^2}{\lambda_I}\frac{1}{\omega_n^2} (e^{\lambda_Rt}(\lambda_R\sin\lambda_It-\lambda_I\cos\lambda_It)+\lambda_I)}\\ \displaystyle{=1-\frac{\omega_n}{\lambda_I}e^{\lambda_Rt} (\sin\lambda_It\times\frac{-\lambda_R}{\omega_n}+\cos\lambda_It\times\frac{\lambda_I}{\omega_n})}\\ \displaystyle{=1-\frac{\omega_n}{\lambda_I}e^{\lambda_Rt} (\sin\lambda_It\cos\phi+\cos\lambda_It\sin\phi)}\\ \displaystyle{=1-\frac{\omega_n}{\lambda_I}e^{\lambda_Rt}\sin(\lambda_It+\phi) \quad(\phi=\tan^{-1}\frac{\lambda_I}{-\lambda_R})} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-70211d9c75bdadc0383d2b9c1b25fa64_l3.png "Rendered by QuickLaTeX.com")
 とおくと、インパルス応答とステップ応答はそれぞれそれぞれ次式で与えられます。
とおくと、インパルス応答とステップ応答はそれぞれそれぞれ次式で与えられます。

![(14)\quad \begin{array}{l} \displaystyle{S(t)=\int_0^tG(\tau)d\tau=\int_0^t\lambda^2\tau e^{\lambda\tau}d\tau}\\ \displaystyle{=\lambda^2\left[\tau \frac{1}{\lambda}e^{\lambda\tau}\right]_0^t -\lambda^2\int_0^t \frac{1}{\lambda}e^{\lambda\tau}d\tau}\\ \displaystyle{=\lambda te^{\lambda t}-\lambda\left[\frac{1}{\lambda}e^{\lambda\tau}\right]_0^t}\\ \displaystyle{=1+(\lambda t-1)e^{\lambda t}} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f57dc1b1984646aeeeaafbb17bfcee60_l3.png "Rendered by QuickLaTeX.com")
 、
、 、
、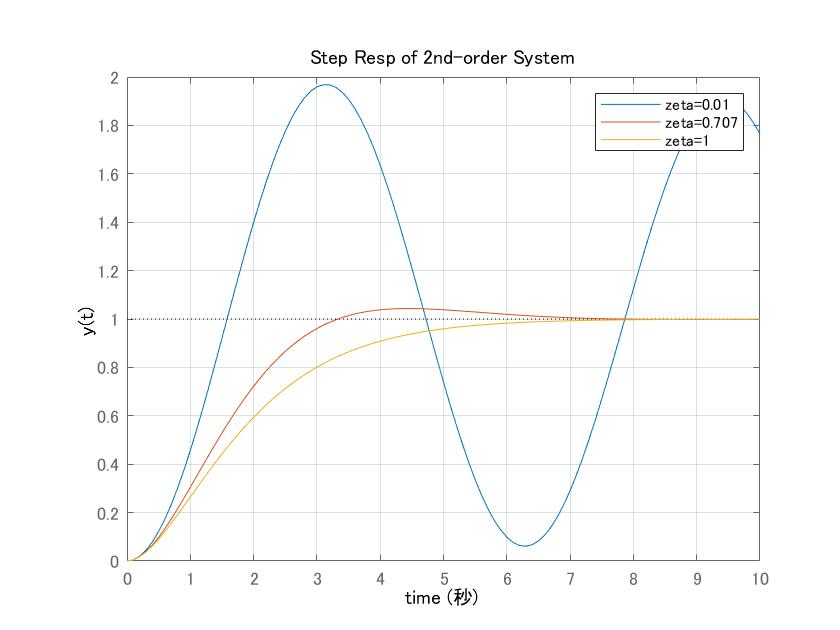 図2 2次系のステップ応答の比較
図2 2次系のステップ応答の比較

 を計算すると
を計算すると

 における
における の値は
の値は

 から
から


 )、上式は
)、上式は
 とすると(零状態応答だけを考えます)
とすると(零状態応答だけを考えます)


 図1 多変数系時間等応答の相互関係
図1 多変数系時間等応答の相互関係 、
、 、
、![\displaystyle{(7a)\quad \boxed{\underbrace{ \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{x}_2(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{cc} 0 & 1\\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{cc} 0 \\ K\omega_n^2 \end{array}\right] }_{B} u(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-aa4b19afa6fbdeb818288fb5934edb63_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(7b)\quad y(t)= \underbrace{ \left[\begin{array}{cc} 1 & 0 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1ef77e878f73e539d8dc80f6688ac1a5_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(10a)\quad \underbrace{ \left[\begin{array}{cc} 0 & 1\\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} = \underbrace{ \left[\begin{array}{cc} 1 & 1\\ \lambda_1 & \lambda_2 \end{array}\right] }_{V} \underbrace{ \left[\begin{array}{cc} \lambda_1& 0\\ 0 & \lambda_2 \end{array}\right] }_{\Lambda} \underbrace{ \left[\begin{array}{cc} 1 & 1\\ \lambda_1 & \lambda_2 \end{array}\right]^{-1} }_{V^{-1}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3cecd035fcbda6f346f77661cc428347_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(10b)\quad \exp(\Lambda t)= \left[\begin{array}{cc} e^{\lambda_1t}& 0\\ 0 & e^{\lambda_2t} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f33756dd4649828b5eb0b564b9e54eb9_l3.png "Rendered by QuickLaTeX.com")
![(11)\quad \begin{array}{l} \displaystyle{G(t)=C\exp(At)B=CV\exp(\Lambda t)V^{-1}B}\\ \displaystyle{ =\left[\begin{array}{cc} 1 & 0 \end{array}\right] \left[\begin{array}{cc} 1 & 1\\ \lambda_1 & \lambda_2 \end{array}\right] \left[\begin{array}{cc} e^{\lambda_1t}& 0\\ 0 & e^{\lambda_2t} \end{array}\right] \frac{1}{\lambda_2-\lambda_1} \left[\begin{array}{cc} \lambda_2 & -1\\ -\lambda_1 & 1 \end{array}\right] \left[\begin{array}{cc} 0 \\ \omega_n^2 \end{array}\right]}\\ \displaystyle{ =\frac{\omega_n^2}{\lambda_2-\lambda_1} \left[\begin{array}{cc} e^{\lambda_1t}& e^{\lambda_2t} \end{array}\right] \left[\begin{array}{cc} -1\\ 1 \end{array}\right]}\\ \displaystyle{=\frac{\lambda_1 \lambda_2}{\lambda_2-\lambda_1}(e^{\lambda_2t}-e^{\lambda_1t})} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1f10feaa91b2bb7d8913903cbd15b9c3_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(13a)\quad \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} = \underbrace{ \left[\begin{array}{cc} 1 & 0 \\ \lambda_R & \lambda_I \end{array}\right] }_{V} \underbrace{ \left[\begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array}\right] }_{\Lambda} \underbrace{ \frac{1}{\lambda_I} \left[\begin{array}{cc} \lambda_I & 0 \\ -\lambda_R & 1 \end{array}\right] }_{V^{-1}}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-615266a9890c4e3022d07970c6f5f659_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(13b)\quad \exp(\Lambda t)= e^{\lambda_R t} \left[\begin{array}{cc} \cos\lambda_I t & \sin\lambda_I t\\ \sin\lambda_I t & \cos\lambda_I t \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1181644876ac095faec7948783874615_l3.png "Rendered by QuickLaTeX.com")
![(14)\quad \begin{array}{l} \displaystyle{G(t)=C\exp(At)B=CV\exp(\Lambda t)V^{-1}B}\\ \displaystyle{=\left[\begin{array}{cc} 1 & 0 \end{array}\right] \left[\begin{array}{cc} 1 & 0\\ \lambda_R & \lambda_I \end{array}\right] e^{\lambda_R t} \left[\begin{array}{cc} \cos\lambda_I t & \sin\lambda_I t\\ \sin\lambda_I t & \cos\lambda_I t \end{array}\right] \frac{1}{\lambda_I} \left[\begin{array}{cc} \lambda_I & 0\\ -\lambda_R & 1 \end{array}\right] \left[\begin{array}{cc} 0 \\ \omega_n^2 \end{array}\right]}\\ \displaystyle{=\frac{\omega_n^2}{\lambda_I} e^{\lambda_R t} \left[\begin{array}{cc} 1 & 0 \end{array}\right] \left[\begin{array}{cc} \cos\lambda_I t & \sin\lambda_I t\\ \sin\lambda_I t & \cos\lambda_I t \end{array}\right] \left[\begin{array}{cc} 0\\ 1 \end{array}\right]}\\ \displaystyle{=\frac{\omega_n^2}{\lambda_I} e^{\lambda_R t}\sin\lambda_I t} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2f44bd53bbc94bd725169439890f6d6f_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(16a)\quad \underbrace{ \left[\begin{array}{cc} 0 & 1\\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} = \underbrace{ \left[\begin{array}{cc} 1 & 1\\ \lambda & \lambda+1 \end{array}\right] }_{V} \underbrace{ \left[\begin{array}{cc} \lambda & 1\\ 0 & \lambda \end{array}\right] }_{\Lambda} \underbrace{ \left[\begin{array}{cc} 1 & 1\\ \lambda & \lambda+1 \end{array}\right]^{-1} }_{V^{-1}}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8cd4b43f3e55efbc7942c5a68825fdd5_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(16b)\quad \exp(\Lambda t)= e^{\lambda t} \left[\begin{array}{cc} 1 & t\\ 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-531ba00175d16217ea3879c138ccf345_l3.png "Rendered by QuickLaTeX.com")
![(17)\quad \begin{array}{l} \displaystyle{G(t)=C\exp(At)B=CV\exp(\Lambda t)V^{-1}B}\\ \displaystyle{= \left[\begin{array}{cc} 1 & 0 \end{array}\right] \left[\begin{array}{cc} 1 & 1\\ \lambda & \lambda+1 \end{array}\right] e^{\lambda t} \left[\begin{array}{cc} 1 & t\\ 0 & 1 \end{array}\right] \frac{1}{\lambda+1-\lambda} \left[\begin{array}{cc} \lambda+1 & -1\\ -\lambda & 1 \end{array}\right] \left[\begin{array}{cc} 0 \\ \omega_n^2 \end{array}\right]}\\ \displaystyle{= \omega_n^2 e^{\lambda t} \left[\begin{array}{cc} 1 & t+1 \end{array}\right] \left[\begin{array}{cc} -1\\ 1 \end{array}\right]}\\ \displaystyle{=\lambda^2te^{\lambda t}} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-879b5bb9640f77dc6264c3509e6d3b66_l3.png "Rendered by QuickLaTeX.com")
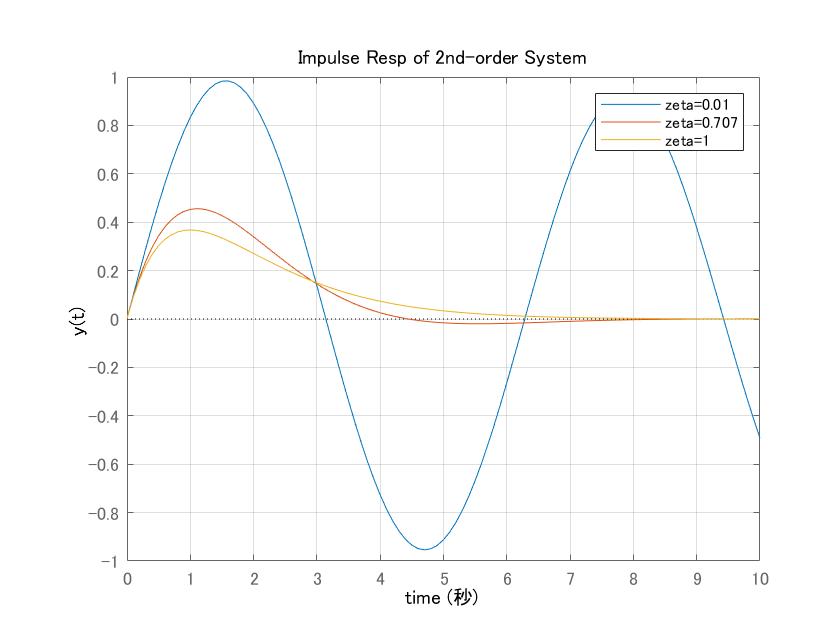 図3 2次系のインパルス応答の比較
図3 2次系のインパルス応答の比較
 の頂点の座標について、次が成り立ちます。
の頂点の座標について、次が成り立ちます。
 を計算すると
を計算すると

 における
における の値は
の値は



 から
から


 から
から まで積分して
まで積分して![\displaystyle{(3)\quad\left[\exp(-At)x(t)\right]_0^{t'}=\int_0^{t'}\exp(-At)Bu(t)dt}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c830bab15955cf4a78ccc6e7124f4b5f_l3.png "Rendered by QuickLaTeX.com")


 に、
に、
 と
と に対するそれぞれの零状態応答は
に対するそれぞれの零状態応答は




 )と(
)と( )を持ちます。
)を持ちます。

 は定数)。これから平衡状態(
は定数)。これから平衡状態(![\displaystyle{(2)\quad \underbrace{ \left[\begin{array}{l} \dot{\theta}(t) \\ \dot{\omega}(t) \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\frac{3g}{4\ell}&-\frac{c}{J} \end{array}\right] }_{A=A_1} \underbrace{ \left[\begin{array}{l} \theta(t) \\ \omega(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4b0ce9ec40944273a34f18d341b8adee_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(3)\quad \underbrace{ \frac{d}{dt} \left[\begin{array}{l} \theta(t)-\pi \\ \omega(t)-0 \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ \frac{3g}{4\ell}&-\frac{c}{J} \end{array}\right] }_{A=A_2} \underbrace{ \left[\begin{array}{l} \theta(t)-\pi \\ \omega(t)-0 \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-41c9758c694af6b502977f96707d2252_l3.png "Rendered by QuickLaTeX.com")
 において、
において、 を意味します。そこで平衡状態が乱されて
を意味します。そこで平衡状態が乱されて となる時刻を
となる時刻を
 に戻ることでしたから、次のように表すことができます。
に戻ることでしたから、次のように表すことができます。
 の解を求める必要があります。これは次式で表されます(Note A21-1参照)。
の解を求める必要があります。これは次式で表されます(Note A21-1参照)。
 は
は
![\displaystyle{(8)\quad \underbrace{ \left[\begin{array}{l} \dot{x}_1(t) \\ \dot{x}_2(t) \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} a_{11} & a_{12} \\ a_{21} & a_{22} \\ \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{l} x_1(t) \\ x_2(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-046c4f6841329195eebc57253eb3c74e_l3.png "Rendered by QuickLaTeX.com")

 であれば
であれば

![\displaystyle{(12)\quad \underbrace{ \left[\begin{array}{l} {x}_1(t) \\ {x}_2(t) \end{array}\right] }_{{x}(t)}= \underbrace{ \left[\begin{array}{cc} e^{a_{11}t} & 0 \\ 0 & e^{a_{22}t} \\ \end{array}\right] }_{\exp(At)} \underbrace{ \left[\begin{array}{l} x_1(0) \\ x_2(0) \end{array}\right] }_{x(0)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3fc962831e63a0a25061b8aa13a7e276_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(14)\quad \underbrace{ \left[\begin{array}{l} {y}_1(t) \\ {y}_2(t) \end{array}\right] }_{y(t)}= \underbrace{ \left[\begin{array}{cc} t_{11} & t_{12} \\ t_{21} & t_{22} \\ \end{array}\right] }_{T} \underbrace{ \left[\begin{array}{l} x_1(t) \\ x_2(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1f9192d4ccaf8b281f53ec8515bc7e4e_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(16)\quad \underbrace{ \left[\begin{array}{l} {x}_1(t) \\ {x}_2(t) \end{array}\right] }_{x(t)}= \underbrace{ \left[\begin{array}{cc} v_{11} & v_{12} \\ v_{21} & v_{22} \\ \end{array}\right] }_{V} \underbrace{ \left[\begin{array}{l} y_1(t) \\ y_2(t) \end{array}\right] }_{y(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c2d9dcfa810ad808ce73e74692c8a23e_l3.png "Rendered by QuickLaTeX.com")
 が成り立つので、
が成り立つので、 (
( )となっています。逆行列をもつ行列は正則行列と呼ばれます。
)となっています。逆行列をもつ行列は正則行列と呼ばれます。 を行ないます。
を行ないます。 (
( を代入して次を得ます。
を代入して次を得ます。
 を標準形とする方法として学びました。もし
を標準形とする方法として学びました。もし を求めることができると
を求めることができると

![\displaystyle{(20)\quad \Lambda_1= \left[\begin{array}{cc} \lambda_1 & 0 \\ 0 & \lambda_2 \end{array}\right] \quad(\lambda(A)=\{\lambda_1,\lambda_2\}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e1804e6c678de29c4cdaec3d2b35ea9d_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(21)\quad \Lambda_2= \left[\begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array}\right] \quad(\lambda(A)=\{\lambda_R\pm j\lambda_I\}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e83b638919ed22ed2816ba8b87e8efc9_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(22)\quad \Lambda_3= \left[\begin{array}{cc} \lambda & 1 \\ 0 & \lambda \end{array}\right] \quad(\lambda(A)=\{\lambda,\lambda\}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-776d81e4bf4b579814ecfc5f23b30528_l3.png "Rendered by QuickLaTeX.com")
 、
、 、
、 、
、 で表すと
で表すと
 は行列
は行列 は特性多項式と呼ばれます。
は特性多項式と呼ばれます。![\displaystyle{(24)\quad \exp(\Lambda_1 t)= \left[\begin{array}{cc} e^{\lambda_1t} & 0 \\ 0 & e^{\lambda_2 t} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c6b08b1e611d0a89659e8db279dcb12c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(25)\quad \exp(\Lambda_2 t)=e^{\lambda_R t} \left[\begin{array}{cc} \cos(\lambda_It) & \sin(\lambda_It) \\ -\sin(\lambda_It) & \cos(\lambda_It) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-442ba2155026c2418284c3a538a3bd38_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(26)\quad \exp(\Lambda_3 t)=e^{\lambda t} \left[\begin{array}{cc} 1 & t \\ 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f96454be75ef40cad5f86d97de6a1b8a_l3.png "Rendered by QuickLaTeX.com")
 かつ
かつ 、(25)のとき
、(25)のとき 、(26)のとき
、(26)のとき であることがわかると思います。したがって、
であることがわかると思います。したがって、![(27)\quad \begin{array}{l} \displaystyle{{\rm det}(\lambda I_2-\left[\begin{array}{cc} 0 & 1 \\ -\frac{3g}{4\ell}&-\frac{c}{J} \end{array}\right]) =\lambda^2+\frac{c}{J}\lambda+\frac{3g}{4\ell}=0}\\ \displaystyle{\Rightarrow \lambda=\frac{1}{2}(-\frac{c}{J}\pm\sqrt{\frac{c^2}{J^2}-4\frac{3g}{4\ell}})} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-583dc0fe6afab483b2d75508fcda8317_l3.png "Rendered by QuickLaTeX.com")
 より小)。したがって、平衡状態(
より小)。したがって、平衡状態(![(28)\quad \begin{array}{l} \displaystyle{{\rm det}(\lambda I_2-\left[\begin{array}{cc} 0 & 1 \\ \frac{3g}{4\ell}&-\frac{c}{J} \end{array}\right]) =\lambda^2+\frac{c}{J}\lambda-\frac{3g}{4\ell}=0}\\ \displaystyle{\Rightarrow \lambda=\frac{1}{2}(-\frac{c}{J}\pm\sqrt{\frac{c^2}{J^2}+4\frac{3g}{4\ell}})} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-99fa4cb16d7c26822049e462a9e29955_l3.png "Rendered by QuickLaTeX.com")

 行列指数関数の定義から、次式を用いて、(25)を示せ。
行列指数関数の定義から、次式を用いて、(25)を示せ。![\displaystyle{(30)\quad \left[\begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array}\right]= \underbrace{\lambda_RI_2}_{X}+ \underbrace{\lambda_I \left[\begin{array}{cc} 0 & 1 \\ -1 & 0 \end{array}\right]}_{Y} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8472da3e29ace3b64c9ea7116ccbc33a_l3.png "Rendered by QuickLaTeX.com")
 行列指数関数の定義から、次式を用いて、(26)を示せ。
行列指数関数の定義から、次式を用いて、(26)を示せ。![\displaystyle{(31)\quad \left[\begin{array}{cc} \lambda & 1 \\ 0 & \lambda \end{array}\right]= \underbrace{\lambda I_2}_{X}+ \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 0 & 0 \end{array}\right]}_{Y} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-dcdfdae4bb1e403c6e462b17b09f27aa_l3.png "Rendered by QuickLaTeX.com")
 を実部が大きな順に表示されるように改良せよ。
を実部が大きな順に表示されるように改良せよ。


 をかけると
をかけると

 を定数ベクトルとして
を定数ベクトルとして




 は適当な
は適当な に対して、
に対して、 となるための条件は
となるための条件は
 (
( )の解のグラフを見ると、
)の解のグラフを見ると、 の場合は、漸近安定ではないが、発散はしないので、不安定とまではいえないのではないかと思うかもしれません。したがって零の固有値を不安定とみなすのか、安定とみなすか迷うところです。しかし、
の場合は、漸近安定ではないが、発散はしないので、不安定とまではいえないのではないかと思うかもしれません。したがって零の固有値を不安定とみなすのか、安定とみなすか迷うところです。しかし、![A=\left[\begin{array}{cc} 0& 1\\ 0& 0 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-376a786d94c78b706c067edc1ab154bc_l3.png "Rendered by QuickLaTeX.com") の場合、解は
の場合、解は![x(t)=\left[\begin{array}{cc} 1& t\\ 0& 1 \end{array}\right]x(0)](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-cd138b72c733ad352d3b5b437f9acd95_l3.png "Rendered by QuickLaTeX.com") となって、
となって、 とし、次が成り立つとします。
とし、次が成り立つとします。
![\displaystyle{(3a)\quad \Lambda_1= \left[\begin{array}{cc} \lambda_1 & 0 \\ 0 & \lambda_2 \end{array}\right] \quad(\lambda(A)=\{\lambda_1,\lambda_2\}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b532756f5ad89c6ab9bdeba946e88dc9_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(3b)\quad \Lambda_2= \left[\begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array}\right] \quad(\lambda(A)=\{\lambda_R\pm j\lambda_I\}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d94729a919c774a51c18cd84bb2f74a3_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(3c)\quad \Lambda_3= \left[\begin{array}{cc} \lambda & 1 \\ 0 & \lambda \end{array}\right] \quad(\lambda(A)=\{\lambda,\lambda\}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c7dc1dc662ca8992d4e346d878d65826_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(4a)\quad A=\underbrace{\left[\begin{array}{cc} v_1 & v_2 \end{array}\right]}_{V} \underbrace{\left[\begin{array}{cc} \lambda_1 & 0 \\ 0 & \lambda_2 \end{array}\right]}_{\Lambda_1} \underbrace{\left[\begin{array}{cc} v_1 & v_2 \end{array}\right]^{-1}}_{V^{-1}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bb555c7741c2c5d90cef778c129e86b1_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(4b)\quad \begin{array}{l} A=\underbrace{\left[\begin{array}{cc} v_R+jv_I & v_R-jv_I \end{array}\right]}_{V} \left[\begin{array}{cc} \lambda_R+j\lambda_I & 0 \\ 0 & \lambda_R-j\lambda_I \end{array}\right]\\ \times\underbrace{\left[\begin{array}{cc} v_R+jv_I & v_R-jv_I \end{array}\right]^{-1}}_{V^{-1}}\\ =\underbrace{\left[\begin{array}{cc} v_R & v_I \end{array}\right]}_{V'} \underbrace{\left[\begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array}\right]}_{\Lambda_2} \underbrace{\left[\begin{array}{cc} v_R & v_I \end{array}\right]^{-1}}_{V'^{-1}} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e0fbba71d2b00a6133e75ae5071cf18d_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(4c)\quad A=\underbrace{\left[\begin{array}{cc} v & v' \end{array}\right]}_{V} \underbrace{\left[\begin{array}{cc} \lambda & 1 \\ 0 & \lambda \end{array}\right]}_{\Lambda_3} \underbrace{\left[\begin{array}{cc} v & v' \end{array}\right]^{-1}}_{V^{-1}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-96f0aeda7d33e0892c1b3ae15b9c822f_l3.png "Rendered by QuickLaTeX.com")
 、
、 、
、 、
、 はすべて2次元の実ベクトルです(
はすべて2次元の実ベクトルです(![\displaystyle{(5a)\quad \exp(A t)=\underbrace{\left[\begin{array}{cc} v_1 & v_2 \end{array}\right]}_{V} \underbrace{\left[\begin{array}{cc} e^{\lambda_1t} & 0 \\ 0 & e^{\lambda_2 t} \end{array}\right]}_{\exp(\Lambda_1 t)} \underbrace{\left[\begin{array}{cc} v_1 & v_2 \end{array}\right]^{-1}}_{V^{-1}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a2c20a571b582858c129f9525483fde7_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(5b)\quad \exp(A t)=\underbrace{\left[\begin{array}{cc} v_R & v_I \end{array}\right]}_{V'} \underbrace{e^{\lambda_R t} \left[\begin{array}{cc} \cos(\lambda_It) & \sin(\lambda_It) \\ -\sin(\lambda_It) & \cos(\lambda_It) \end{array}\right]}_{\exp(\Lambda_2 t)} \underbrace{\left[\begin{array}{cc} v_R & v_I \end{array}\right]^{-1}}_{V'^{-1}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e2598816f3c649ae154eb107c7bd9756_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(5c)\quad \exp(A t)=\underbrace{\left[\begin{array}{cc} v & v' \end{array}\right]}_{V} \underbrace{e^{\lambda t} \left[\begin{array}{cc} 1 & t \\ 0 & 1 \end{array}\right]}_{\exp(\Lambda_3 t)} \underbrace{\left[\begin{array}{cc} v & v' \end{array}\right]^{-1}}_{V^{-1}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1ccd3c10da477fac06071a60073df28c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(6a)\quad \begin{array}{l} x(t)=\underbrace{\left[\begin{array}{cc} v_1 & v_2 \end{array}\right]}_{V} \underbrace{\left[\begin{array}{cc} e^{\lambda_1t} & 0 \\ 0 & e^{\lambda_2 t} \end{array}\right]}_{\exp(\Lambda_1 t)} \underbrace{\left[\begin{array}{cc} v_1 & v_2 \end{array}\right]^{-1}x(0)}_{\left[\begin{array}{c} c_1\\c_2 \end{array}\right]}\\ =c_1e^{\lambda_1t}v_1+c_2e^{\lambda_2t}v_2 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b73bdf17802abab8139590333ce5ddc8_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(6b)\quad \begin{array}{l} x(t)=\underbrace{\left[\begin{array}{cc} v_R & v_I \end{array}\right]}_{V'} \underbrace{e^{\lambda_R t} \left[\begin{array}{cc} \cos(\lambda_It) & \sin(\lambda_It) \\ -\sin(\lambda_It) & \cos(\lambda_It) \end{array}\right]}_{\exp(\Lambda_2 t)} \underbrace{\left[\begin{array}{cc} v_R & v_I \end{array}\right]^{-1}x(0)}_{\left[\begin{array}{c} c_1\\c_2 \end{array}\right]}\\ =c_1e^{\lambda_Rt}(\cos(\lambda_It)v_R-\sin(\lambda_It)v_I)+c_2e^{\lambda_Rt}(\sin(\lambda_It)v_R+\cos(\lambda_It)v_I) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-68447de2b9180ed5ba5e49bac88f6ad3_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(6c)\quad \begin{array}{l} x(t)=\underbrace{\left[\begin{array}{cc} v & v' \end{array}\right]}_{V} \underbrace{e^{\lambda t} \left[\begin{array}{cc} 1 & t \\ 0 & 1 \end{array}\right]}_{\exp(\Lambda_3 t)} \underbrace{\left[\begin{array}{cc} v & v' \end{array}\right]^{-1}x(0)}_{\left[\begin{array}{c} c_1\\c_2 \end{array}\right]}\\ =c_1e^{\lambda t}v+c_2e^{\lambda t}(tv+v') \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a89702614e30351370d03c8a88ab2200_l3.png "Rendered by QuickLaTeX.com")