| SCILAB |
//ship9.sce
//-----
function [LME,LMI,OBJ]=synlmi(YLIST)
[gam,R,S,AK1,BK1,CK1,DK1,AK2,BK2,CK2,DK2,AK3,BK3,CK3,DK3]=YLIST(:);
LME1=R-R';
LME2=S-S';
LME=list(LME1,LME2);
LMI0=[R eye(A1);eye(A1) S];
AW1=[A1*R+B2*CK1 A1+B2*DK1*C2;
AK1 S*A1+BK1*C2];
LMI11=-(AW1+AW1'+2*alpha*LMI0);
LMI21=-[-r*LMI0 AW1;AW1 -r*LMI0];
LMI31=-[sin(th)*AW1 cos(th)*AW1;-cos(th)*AW1 sin(th)*AW1];
LMI31=LMI31+LMI31';
BW=[B1+B2*DK1*D21;
S*B1+BK1*D21];
CW1=[C11*R+D121*CK1 C11+D121*DK1*C2];
[p,m]=size(D11);
LMI41=-[AW1+AW1' BW CW1'
BW' -gam*eye(m,m) (D11+D121*DK1*D21)'
CW1 D11+D121*DK1*D21 -gam*eye(p,p)];
[p,m]=size(DK1);
LMI51=-[-1e2*eye(m,m) DK1';DK1 -1e2*eye(p,p)];
//
AW2=[A2*R+B2*CK2 A2+B2*DK2*C2;
AK2 S*A2+BK2*C2];
LMI12=-(AW2+AW2'+2*alpha*LMI0);
LMI22=-[-r*LMI0 AW2;AW2 -r*LMI0];
LMI32=-[sin(th)*AW2 cos(th)*AW2;-cos(th)*AW2 sin(th)*AW2];
LMI32=LMI32+LMI32';
BW=[B1+B2*DK2*D21;
S*B1+BK2*D21];
CW2=[C12*R+D122*CK2 C12+D122*DK2*C2];
[p,m]=size(D11);
LMI42=-[AW2+AW2' BW CW2'
BW' -gam*eye(m,m) (D11+D122*DK2*D21)'
CW2 D11+D122*DK2*D21 -gam*eye(p,p)];
[p,m]=size(DK2);
LMI52=-[-1e2*eye(m,m) DK2';DK2 -1e2*eye(p,p)];
//
AW3=[A3*R+B2*CK3 A3+B2*DK3*C2;
AK3 S*A3+BK3*C2];
LMI13=-(AW3+AW3'+2*alpha*LMI0);
LMI23=-[-r*LMI0 AW3;AW3 -r*LMI0];
LMI33=-[sin(th)*AW3 cos(th)*AW3;-cos(th)*AW3 sin(th)*AW3];
LMI33=LMI33+LMI33';
BW=[B1+B2*DK3*D21;
S*B1+BK3*D21];
CW3=[C13*R+D123*CK3 C13+D123*DK3*C2];
[p,m]=size(D11);
LMI43=-[AW3+AW3' BW CW3'
BW' -gam*eye(m,m) (D11+D123*DK3*D21)'
CW3 D11+D123*DK3*D21 -gam*eye(p,p)];
[p,m]=size(DK3);
LMI53=-[-1e2*eye(m,m) DK3';DK3 -1e2*eye(p,p)];
LMI=list(LMI0,LMI11,LMI21,LMI31,LMI41,LMI51,LMI12,LMI22,LMI32,LMI42,LMI52,LMI13,LMI23,LMI33,LMI43,LMI53);
OBJ=gam;
endfunction
//-----
function [AK,BK,CK,DK]=syncont(R,S,ak,bk,ck,dk)
[u,sd,v]=svd(eye()-S*R); Ni=sqrt(sd)\u'; Mti=v/sqrt(sd);
AK=Ni*(ak-S*(A-B2*dk*C2)*R-bk*C2*R-S*B2*ck)*Mti;
BK=Ni*(bk-S*B2*dk);
CK=(ck-dk*C2*R)*Mti;
DK=dk;
endfunction
//=====
T1=118; T2=7.8; T3=18.5; Tship=T1+T2-T3; Kship=0.185;
Tdelta=10; Kdelta=1; tL=9;
wD1=tL; wD2=tL; wD3=tL; wI1=0.01; wI2=0.01; wI3=0.01;
//
A0=[0 1 0;0 -1/Tship Kship/Tship;0 0 -1/Tdelta]; B0=[0;0;Kdelta/Tdelta];
C0=[1 0 0];
//-----
Us=7.7; U1=Us*0.5; U2=Us*1.5; U3=(U1+U2)/2; U32=U1*U2;
a0=[ 0 1 0 0;
0 0 0 0;
0 0 -1/Tdelta 0;
-1 0 0 0];
a1=[ 0 0 0 0;
0 -1/Us/Tship 0 0;
0 0 0 0;
0 0 0 0];
a2=[ 0 0 0 0;
0 0 1/Us^2*Kship/Tship 0;
0 0 0 0;
0 0 0 0];
A1=a0+U1*a1+U1^2*a2;
A2=a0+U2*a1+U2^2*a2;
A3=a0+U3*a1+U32*a2;
B1=[zeros(3,1);1];
B2=[B0;0];
C11=[zeros(1,3) wI1;wD1*C0*A0 0;zeros(1,4)];
C12=[zeros(1,3) wI2;wD2*C0*A0 0;zeros(1,4)];
C13=[zeros(1,3) wI3;wD3*C0*A0 0;zeros(1,4)];
D11=zeros(3,1);
D121=[0;wD1*C0*B0;1];
D122=[0;wD2*C0*B0;1];
D123=[0;wD3*C0*B0;1];
C2=[C0 0;zeros(1,3) 1];
D21=[0;0];
D22=[0;0];
//-----
alpha=0.01; r=15; th=%pi/4;
gam0=100; R0=eye(4,4); S0=eye(4,4);
AK0=-eye(4,4); BK0=ones(4,2); CK0=ones(1,4); DK0=ones(1,2);
YLIST0=list(gam0,R0,S0,AK0,BK0,CK0,DK0,AK0,BK0,CK0,DK0,AK0,BK0,CK0,DK0);
YLIST=lmisolver(YLIST0,synlmi);
[gam,R,S,ak1,bk1,ck1,dk1,ak2,bk2,ck2,dk2,ak3,bk3,ck3,dk3]=YLIST(:);
//
A=A1; [AK1,BK1,CK1,DK1]=syncont(R,S,ak1,bk1,ck1,dk1);
plK1=spec(AK1),
ACL1=[A1+B2*DK1*C2 B2*CK1;BK1*C2 AK1];
BCL1=[B1+B2*DK1*D21;BK1*D21];
CCL1=[C2(1,:) zeros(1,4)];
plCL1=spec(ACL1)
//
A=A2; [AK2,BK2,CK2,DK2]=syncont(R,S,ak2,bk2,ck2,dk2);
plK2=spec(AK2),
ACL2=[A2+B2*DK2*C2 B2*CK2;BK2*C2 AK2];
BCL2=[B2+B2*DK2*D21;BK2*D21];
CCL2=[C2(1,:) zeros(1,4)];
plCL2=spec(ACL2)
//
A=A3; [AK3,BK3,CK3,DK3]=syncont(R,S,ak3,bk3,ck3,dk3);
plK3=spec(AK3),
ACL3=[A3+B2*DK3*C2 B2*CK3;BK3*C2 AK3];
BCL3=[B1+B2*DK3*D21;BK3*D21];
CCL3=[C2(1,:) zeros(1,4)];
plCL3=spec(ACL3)
//-----
AK1=[AK1 BK1(:,2);zeros(1,5)];
BK1=[BK1(:,1) zeros(4,1); -1 1];
CK1=[CK1 DK1(:,2)];
DK1=[DK1(:,1) 0];
AL1=[A1 B2*CK1;zeros(5,4) AK1];
BL1=[B2*DK1; BK1];
CL1=[C2 D22*CK1];
DL1=D22*DK1;
clf(0),clf(1)
w=logspace(-3,0,100); nw=length(w);
g=freq(A0,B0,C0,%i*w);
for i=1:nw, ga(i)=20*log10(norm(g(:,i))); end
scf(0);plot2d(w,ga,logflag='ln')
gws=20*log10(abs(wI1./(%i*w))); gwt=20*log10(abs(wD1^(-1)./(%i*w)));
scf(0);plot2d(w,gws,logflag='ln')
scf(0);plot2d(w,gwt,logflag='ln')
g=freq(AL1,BL1(:,1),CL1(1,:),DL1(1,1),%i*w);
for i=1:nw, ga(i)=20*log10(abs(g(:,i))); end
scf(0);plot2d(w,ga,logflag='ln'),mtlb_grid,mtlb_axis([10^(-3) 10^0 -80 60])
g=freq(ACL1,BCL1,CCL1,%i*w);
for i=1:nw, ga(i)=20*log10(abs(g(:,i))); end
scf(1);plot2d(w,ga,logflag='ln')
for i=1:nw, ga(i)=20*log10(abs(1-g(:,i))); end
scf(1);plot2d(w,ga,logflag='ln'),mtlb_grid,mtlb_axis([10^(-3) 10^0 -80 60])
scf(1);plot2d(w,-gws,logflag='ln')
scf(1);plot2d(w,gwt,logflag='ln')
//
clf(2),clf(3)
AK2=[AK2 BK2(:,2);zeros(1,5)];
BK2=[BK2(:,1) zeros(4,1); -1 1];
CK2=[CK2 DK2(:,2)];
DK2=[DK2(:,1) 0];
AL2=[A2 B2*CK1;zeros(5,4) AK1];
BL2=[B2*DK1; BK1];
CL2=[C2 D22*CK1];
DL2=D22*DK1;
w=logspace(-3,0,100); nw=length(w);
g=freq(A0,B0,C0,%i*w);
for i=1:nw, ga(i)=20*log10(norm(g(:,i))); end
scf(2);plot2d(w,ga,logflag='ln')
gws=20*log10(abs(wI2./(%i*w))); gwt=20*log10(abs(wD2^(-1)./(%i*w)));
scf(2);plot2d(w,gws,logflag='ln')
scf(2);plot2d(w,gwt,logflag='ln')
g=freq(AL2,BL2(:,1),CL2(1,:),DL2(1,1),%i*w);
for i=1:nw, ga(i)=20*log10(abs(g(:,i))); end
scf(2);plot2d(w,ga,logflag='ln'),mtlb_grid,mtlb_axis([10^(-3) 10^0 -80 60])
g=freq(ACL2,BCL2,CCL2,%i*w);
for i=1:nw, ga(i)=20*log10(abs(g(:,i))); end
scf(3);plot2d(w,ga,logflag='ln')
for i=1:nw, ga(i)=20*log10(abs(1-g(:,i))); end
scf(3);plot2d(w,ga,logflag='ln'),mtlb_grid,mtlb_axis([10^(-3) 10^0 -80 60])
scf(3);plot2d(w,-gws,logflag='ln')
scf(3);plot2d(w,gwt,logflag='ln')
//
clf(4),clf(5)
AK3=[AK3 BK3(:,2);zeros(1,5)];
BK3=[BK3(:,1) zeros(4,1); -1 1];
CK3=[CK3 DK3(:,2)];
DK3=[DK3(:,1) 0];
AL3=[A3 B2*CK1;zeros(5,4) AK1];
BL3=[B2*DK1; BK1];
CL3=[C2 D22*CK1];
DL3=D22*DK1;
w=logspace(-3,0,100); nw=length(w);
g=freq(A0,B0,C0,%i*w);
for i=1:nw, ga(i)=20*log10(norm(g(:,i))); end
scf(4);plot2d(w,ga,logflag='ln')
gws=20*log10(abs(wI3./(%i*w))); gwt=20*log10(abs(wD3^(-1)./(%i*w)));
scf(4);plot2d(w,gws,logflag='ln')
scf(4);plot2d(w,gwt,logflag='ln')
g=freq(AL3,BL3(:,1),CL3(1,:),DL3(1,1),%i*w);
for i=1:nw, ga(i)=20*log10(abs(g(:,i))); end
scf(4);plot2d(w,ga,logflag='ln'),mtlb_grid,mtlb_axis([10^(-3) 10^0 -80 60])
g=freq(ACL3,BCL3,CCL3,%i*w);
for i=1:nw, ga(i)=20*log10(abs(g(:,i))); end
scf(5);plot2d(w,ga,logflag='ln')
for i=1:nw, ga(i)=20*log10(abs(1-g(:,i))); end
scf(5);plot2d(w,ga,logflag='ln'),mtlb_grid,mtlb_axis([10^(-3) 10^0 -80 60])
scf(5);plot2d(w,-gws,logflag='ln')
scf(5);plot2d(w,gwt,logflag='ln')
//return
//=====
a0=[ 0 1 0 ;
0 0 0 ;
0 0 -1/Tdelta ];
a1=[ 0 0 0 ;
0 -1/Us/Tship 0 ;
0 0 0 ];
a2=[ 0 0 0 ;
0 0 1/Us^2*Kship/Tship;
0 0 0 ];
A1=a0+U1*a1+U1^2*a2;
A2=a0+U2*a1+U2^2*a2;
A3=a0+U3*a1+U32*a2;
//-----
function Q=interp3(P1,P2,P3,P)
x1=P1(1); x2=P2(1); x3=P3(1); x=P(1);
y1=P1(2); y2=P2(2); y3=P3(2); y=P(2);
alpha=((x1-x2)*(y2-y3)-(x2-x3)*(y1-y2));
Q(1) =((x -x2)*(y2-y3)-(x2-x3)*(y -y2))/alpha;
Q(2) =((x1-x3)*(y -y3)-(x -x3)*(y1-y3))/alpha;
Q(3) =((x1-x2)*(y2-y )-(x2-x )*(y1-y2))/alpha;
endfunction
//
function Ut=U(t,ID)
if ID==0, Ut=Us,
else
if t<=ID*100, Ut=Us-(Us-U1)/(ID*100)*t, else Ut=U1, end
end
endfunction
//
function dxG=fG(t,xG), dxG=AG(t)*xG+B0*ut, endfunction
//
function AGt=AG(t),
P1=[U1;U1^2]; P2=[U2;U2^2]; P3=[U3;U3^2]; Ut=U(t,ID); P=[Ut;Ut^2];
Q=interp3(P1,P2,P3,P); p1=Q(1); p2=Q(2); p3=Q(3);
AGt=p1*A1+p2*A2+p3*A3;
endfunction
//
function dxK=fK(t,xK),
dxK=AK(t)*xK+BK(t)*yt,
endfunction
//
function AKt=AK(t),
P1=[U1;U1^2]; P2=[U2;U2^2]; P3=[U3;U3^2]; Ut=U(t,ID); P=[Ut;Ut^2];
Q=interp3(P1,P2,P3,P); p1=Q(1); p2=Q(2); p3=Q(3);
AKt=p1*AK1+p2*AK2+p3*AK3;
endfunction
//
function BKt=BK(t),
P1=[U1;U1^2]; P2=[U2;U2^2]; P3=[U3;U3^2]; Ut=U(t,ID); P=[Ut;Ut^2];
Q=interp3(P1,P2,P3,P); p1=Q(1); p2=Q(2); p3=Q(3);
BKt=p1*BK1+p2*BK2+p3*BK3;
endfunction
//
function CKt=CK(t),
P1=[U1;U1^2]; P2=[U2;U2^2]; P3=[U3;U3^2]; Ut=U(t,ID); P=[Ut;Ut^2];
Q=interp3(P1,P2,P3,P); p1=Q(1); p2=Q(2); p3=Q(3);
CKt=p1*CK1+p2*CK2+p3*CK3;
endfunction
//
function DKt=DK(t),
P1=[U1;U1^2]; P2=[U2;U2^2]; P3=[U3;U3^2]; Ut=U(t,ID); P=[Ut;Ut^2];
Q=interp3(P1,P2,P3,P); p1=Q(1); p2=Q(2); p3=Q(3);
DKt=p1*DK1+p2*DK2+p3*DK3;
endfunction
//-----
clf(6)
t0=0; t1=300; nt=1500; td=(t1-t0)/nt; t=t0:td:t1; iL=tL/td;
xG=zeros(3,1); y=0; xK=zeros(5,1); u=0; ID=0;
for i=1:nt
if i<=iL, yt=[0;1]; ut=0;
else yt=[y(:,i-iL);1]; ut=CK(t(i))*xK(:,i)+DK(t(i))*yt; end
xG=[xG ode(xG(:,i),t(i),t(i+1),fG)];
xK=[xK ode(xK(:,i),t(i),t(i+1),fK)];
y=[y xG(1,i+1)]; u=[u ut];
end
scf(6);subplot(211),plot(t,y,'b');
scf(6);subplot(212),plot(t,u,'b');
//
xG=zeros(3,1); y=0; xK=zeros(5,1); u=0; ID=1;
for i=1:nt
if i<=iL, yt=[0;1]; ut=0;
else yt=[y(:,i-iL);1]; ut=CK(t(i))*xK(:,i)+DK(t(i))*yt; end
xG=[xG ode(xG(:,i),t(i),t(i+1),fG)];
xK=[xK ode(xK(:,i),t(i),t(i+1),fK)];
y=[y xG(1,i+1)]; u=[u ut];
end
scf(6);subplot(211),plot(t,y,'r');
scf(6);subplot(212),plot(t,u,'r');
//
xG=zeros(3,1); y=0; xK=zeros(5,1); u=0; ID=2;
for i=1:nt
if i<=iL, yt=[0;1]; ut=0;
else yt=[y(:,i-iL);1]; ut=CK(t(i))*xK(:,i)+DK(t(i))*yt; end
xG=[xG ode(xG(:,i),t(i),t(i+1),fG)];
xK=[xK ode(xK(:,i),t(i),t(i+1),fK)];
y=[y xG(1,i+1)]; u=[u ut];
end
scf(6);subplot(211),plot(t,y,'m');
scf(6);subplot(212),plot(t,u,'m');
//
xG=zeros(3,1); y=0; xK=zeros(5,1); u=0; ID=3;
for i=1:nt
if i<=iL, yt=[0;1]; ut=0;
else yt=[y(:,i-iL);1]; ut=CK(t(i))*xK(:,i)+DK(t(i))*yt; end
xG=[xG ode(xG(:,i),t(i),t(i+1),fG)];
xK=[xK ode(xK(:,i),t(i),t(i+1),fK)];
y=[y xG(1,i+1)]; u=[u ut];
end
scf(6);subplot(211),plot(t,y,'k'),mtlb_grid,mtlb_axis([t0 t1 -0.5 1.5]);
//legend(['const.vel.';'rapid vel.var.';'medium vel.var.';'slow vel.var.'])
scf(6);subplot(212),plot(t,u,'k'),mtlb_grid,mtlb_axis([t0 t1 -1 1]);
legend(['const.vel.';'rapid vel.var.';'medium vel.var.';'slow vel.var.'])
//-----
//eof
|
![\displaystyle{(1)\quad \underbrace{ \left[\begin{array}{c} \dot x_1(t)\\ \dot x_2(t) \end{array}\right] }_{\dot x(t)} = \underbrace{ \left[\begin{array}{cc} A_{11} & A_{12} \\ A_{21} & A_{22} \\ \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{c} 0\\ B_2 \end{array}\right] }_{B} u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a4c8217b8c641b28c9d2c724fc2462cb_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(2)\quad s(t)= \underbrace{ \left[\begin{array}{cc} S_1 & S_2 \\ \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} = \underbrace{S_2 \left[\begin{array}{cc} M & I \\ \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} \ (M=S_2^{-1}S_1) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0639c7053096db5f35e066d8fec1086a_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(3)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{\bar{x}(t)} = \underbrace{ \left[\begin{array}{cc} I & 0 \\ S_1 & S_2 \\ \end{array}\right] }_{T_s} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)}\\ \Leftrightarrow \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} = \underbrace{ \left[\begin{array}{cc} I & 0 \\ -S_2^{-1}S_1 & S_2^{-1} \\ \end{array}\right] }_{T_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{\bar{x}(t)} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d6ab22ac2ca3b874b7f25f131d7dadba_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(4)\quad \underbrace{ \left[\begin{array}{c} \dot x_1(t)\\ \dot s(t) \end{array}\right] }_{\dot{\bar{x}}(t)} = \underbrace{ \left[\begin{array}{cc} \bar{A}_{11} & \bar{A}_{12} \\ \bar{A}_{21} & \bar{A}_{22}\\ \end{array}\right] }_{\bar{A}=T_s A T_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{\bar{x}(t)} + \underbrace{ \left[\begin{array}{c} 0\\ \bar{B}_2 \end{array}\right] }_{\bar{B}=T_sB} u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c151e790bb46588ffe833fc57ad6301b_l3.png "Rendered by QuickLaTeX.com")

 、すなわち、状態が超平面内に拘束されているとすると
、すなわち、状態が超平面内に拘束されているとすると
 の振る舞いは
の振る舞いは によって決まります。一方、
によって決まります。一方、


 が安定行列となるようにスイッチング関数を選ぶためには、(8)に対する状態フィードバックによる安定化問題を解けばよいことが分かります。
が安定行列となるようにスイッチング関数を選ぶためには、(8)に対する状態フィードバックによる安定化問題を解けばよいことが分かります。 を決定する方法が提案されています。
を決定する方法が提案されています。![\displaystyle{(10)\quad \boxed{J=\int_0^\infty \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right]^T }_{x^T(t)} \underbrace{ \left[\begin{array}{cc} Q_{11} & Q_{12} \\ Q_{21} & Q_{22} \end{array}\right] }_{Q} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} dt} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-720950a912af5f2005feadc55eef2316_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(11)\quad \left[\begin{array}{cc} Q_{11} & Q_{12} \\ Q_{21} & Q_{22} \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b918b1aa48174b4ca0725d531e0a3a1f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ =\left[\begin{array}{cc} I & Q_{12}Q_{22}^{-1} \\ 0 & I \end{array}\right] \left[\begin{array}{cc} Q_{11}-Q_{12}Q_{22}^{-1}Q_{21} & 0 \\ 0 & Q_{22} \end{array}\right] \left[\begin{array}{cc} I & 0 \\ Q_{22}^{-1}Q_{21} & I \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a05e1a70ec910d8db925c9e9cdfd9223_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(12)\quad \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right]^T \left[\begin{array}{cc} Q_{11} & Q_{12} \\ Q_{21} & Q_{22} \end{array}\right] \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] =\left[\begin{array}{c} x_1(t)\\ Q_{12}Q_{22}^{-1}x_1(t)+x_2(t) \end{array}\right]^T }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b67f7b3891ae54055fefcef1f1c4c7e0_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \times \left[\begin{array}{cc} Q_{11}-Q_{12}Q_{22}^{-1}Q_{21} & 0 \\ 0 & Q_{22} \end{array}\right] \left[\begin{array}{c} x_1(t)\\ Q_{12}Q_{22}^{-1}x_1(t)+x_2(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-49d660ff1a02cfdda090585ad3c36ad5_l3.png "Rendered by QuickLaTeX.com")










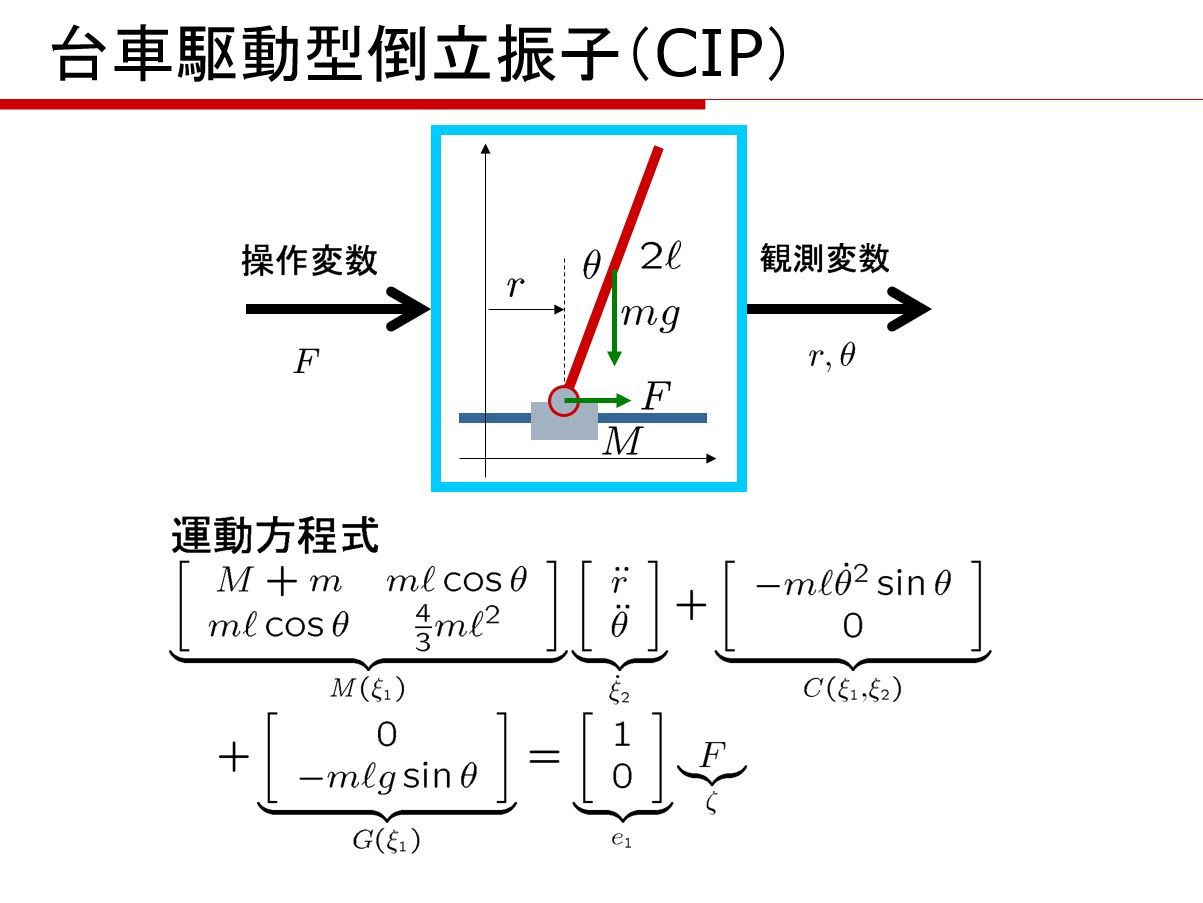
 スイッチング関数決定プログラムswflqrを用いて、図1の台車駆動型倒立振子を安定化する次のSMC則を求めよ。
スイッチング関数決定プログラムswflqrを用いて、図1の台車駆動型倒立振子を安定化する次のSMC則を求めよ。

 を求めるプログラムswflqrが開発されています。
を求めるプログラムswflqrが開発されています。
 はモデル誤差、非線形要素、外乱などの影響を表し、有界かつ未知とします。これに対し、次のスイッチング関数を定義します。
はモデル誤差、非線形要素、外乱などの影響を表し、有界かつ未知とします。これに対し、次のスイッチング関数を定義します。
![\displaystyle{(3)\quad \boxed{\underbrace{ \left[\begin{array}{c} \dot x_1(t)\\ \dot x_2(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{cc} A_{11} & A_{12} \\ A_{21} & A_{22} \\ \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{c} 0\\ B_2 \end{array}\right] }_{B} u(t) + \underbrace{ \left[\begin{array}{l} f_u(t,x)\\ f_m(t,x,u) \end{array}\right] }_{f(t,x,u)}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7d9915e30ab5eebb009f8eba1931c74b_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(4)\quad \boxed{s(t)= \underbrace{ \left[\begin{array}{cc} S_1 & S_2 \\ \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} = \underbrace{S_2 \left[\begin{array}{cc} M & I_m \\ \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} \ (M=S_2^{-1}S_1)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-fd9d30f50f0b1a358dd111e982cf142d_l3.png "Rendered by QuickLaTeX.com")
 と
と はともにサイズ
はともにサイズ の正則行列とします。したがって、
の正則行列とします。したがって、 はマッチング条件を満たしますが、
はマッチング条件を満たしますが、 はマッチング条件を満たさないことに留意します。
はマッチング条件を満たさないことに留意します。![\displaystyle{(5)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{\bar{x}(t)} = \underbrace{ \left[\begin{array}{cc} I & 0 \\ S_1 & S_2 \\ \end{array}\right] }_{T_s} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)}\\ \Leftrightarrow \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} = \underbrace{ \left[\begin{array}{cc} I & 0 \\ -S_2^{-1}S_1 & S_2^{-1} \\ \end{array}\right] }_{T_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{\bar{x}(t)} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9b7409c24983e2cf677cd893ab39c8b1_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(6)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{cc} I & 0 \\ -M & S_2^{-1} \\ \end{array}\right] }_{T_s^{-1}} \underbrace{ \left[\begin{array}{c} \dot x_1(t)\\ \dot s(t) \end{array}\right] }_{\dot{\bar{x}}(t)}\\ = \underbrace{ \left[\begin{array}{cc} A_{11} & A_{12} \\ A_{21} & A_{22} \\ \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{cc} I & 0 \\ -M & S_2^{-1} \\ \end{array}\right] }_{T_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{\bar{x}(t)} + \underbrace{ \left[\begin{array}{c} 0\\ B_2 \end{array}\right] }_{B} u(t)\\ + \underbrace{ \left[\begin{array}{l} f_u(t,x)\\ f_m(t,x,u) \end{array}\right] }_{f(t,x,u)} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2603c79f9420895b735d182a315f4d6a_l3.png "Rendered by QuickLaTeX.com")
 をかけて
をかけて![\displaystyle{(7)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} \dot x_1(t)\\ \dot s(t) \end{array}\right] }_{\dot{\bar{x}}(t)} = \underbrace{ \left[\begin{array}{cc} I & 0 \\ S_1 & S_2 \\ \end{array}\right] }_{T_s} \underbrace{ \left[\begin{array}{cc} A_{11}-A_{12}M & A_{12}S_2^{-1} \\ A_{21}-A_{22}M & A_{22}S_2^{-1} \\ \end{array}\right] }_{AT_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{\bar{x}(t)}\\ + \underbrace{ \left[\begin{array}{cc} I & 0 \\ S_1 & S_2 \\ \end{array}\right] }_{T_s} \underbrace{ \left[\begin{array}{c} 0\\ B_2 \end{array}\right] }_{B} u(t) + \underbrace{ \left[\begin{array}{cc} I & 0 \\ S_1 & S_2 \\ \end{array}\right] }_{T_s} \underbrace{ \left[\begin{array}{l} f_u(t,x)\\ f_m(t,x,u) \end{array}\right] }_{f(t,x,u)} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-97d89cd7503cc935f956b67dce447b04_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(8)\quad \boxed{ \begin{array}{l} \underbrace{ \left[\begin{array}{c} \dot x_1(t)\\ \dot s(t) \end{array}\right] }_{\dot{\bar{x}}(t)} = \underbrace{ \left[\begin{array}{cc} \bar{A}_{11} & \bar{A}_{12} \\ \bar{A}_{21} & \bar{A}_{22}\\ \end{array}\right] }_{\bar{A}=T_s A T_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{\bar{x}(t)} + \underbrace{ \left[\begin{array}{c} 0\\ \bar{B}_2 \end{array}\right] }_{\bar{B}=T_sB} u(t)\\ + \underbrace{ \left[\begin{array}{c} f_u(t,x)\\ S_1f_u(t,x)+S_2f_m(t,x,u) \end{array}\right] }_{T_sf(t,x,u)} \end{array}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-00ef0c4a7e2512e1cdc58d5395f78586_l3.png "Rendered by QuickLaTeX.com")

 の安定行列となるようにスイッチング関数が選ばれていると仮定します。
の安定行列となるようにスイッチング関数が選ばれていると仮定します。
![\displaystyle{(10)\quad \boxed{ \begin{array}{lll} V(\bar{x})= \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right]^T }_{\bar{x}^T(t)} \underbrace{ \left[\begin{array}{cc} P_1 & 0\\ 0 & P_2 \end{array}\right] }_{P} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{\bar{x}(t)}\\ \Rightarrow \dot{V}(\bar{x})\le - \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right]^T }_{\bar{x}^T(t)} \underbrace{ \left[\begin{array}{cc} Q_1 & 0\\ 0 & I \end{array}\right] }_{Q} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{\bar{x}(t)} \end{array}}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b728547541ea693965c4fb59721e61ea_l3.png "Rendered by QuickLaTeX.com")

 ,
,  ,
,  )。
)。 の見積もりを行います。
の見積もりを行います。 として
として![\displaystyle{ \begin{array}{cl} (12.1) & s(t)=0\\ \Downarrow &\\ (12.2) & \dot{s}(t)=0\\ \Downarrow &\\ (12.3) & \bar{A}_{21}x_1(t)+\bar{A}_{22}s(t)+\bar{B}_{2}u(t)=0\\ \Downarrow &\\ (12.4) & u_{eq}(t)=-\underbrace{\bar{B}_{2}^{-1}}_{([0\ I]T_sB)^{-1}} \underbrace{\left[\begin{array}{cc} \bar{A}_{21} & \bar{A}_{22} \\ \end{array}\right]}_{[0\ I]T_sAT_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{\bar{x}(t)}\\ \Downarrow & by\ S=[0\ I]T_s, x=T_s^{-1}\bar{x}\\ (12.5) & u_{eq}(t)=-(SB)^{-1}SAx(t)} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-aa7375ffaeacc584b4d99f678aa447a2_l3.png "Rendered by QuickLaTeX.com")
 は、この等価制御をベースして
は、この等価制御をベースして![\displaystyle{(13.1)\quad u_\ell(t)=-\bar{B}_{2}^{-1} (\left[\begin{array}{cc} \bar{A}_{21} & \bar{A}_{22} \\ \end{array}\right]\bar{x}(t)-\Phi s(t)) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-10fae533f0845c167a4a8eb5e7550fad_l3.png "Rendered by QuickLaTeX.com")

 は適当に設定されたサイズ
は適当に設定されたサイズ![\displaystyle{(14)\quad \begin{array}{l} \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{s}(t) \end{array}\right] = \left[\begin{array}{cc} \bar{A}_{11} & \bar{A}_{12} \\ 0 & \Phi \\ \end{array}\right] \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right]\\ + \left[\begin{array}{c} f_u(t,x)\\ \bar{B}_{2}u_n(t)+S_2(Mf_u(t,x)+f_m(t,x,u)) \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1b7f283e78147327758f740eb0f3d38a_l3.png "Rendered by QuickLaTeX.com")

 から成りますが、(15.2)は
から成りますが、(15.2)は を達成する
を達成する を明らかにします。
を明らかにします。


 は、仮定
は、仮定



 の微分について調べます。
の微分について調べます。






 の微分について調べます。
の微分について調べます。


 は、サイズ
は、サイズ の直交行列
の直交行列 とサイズ
とサイズ を用いて
を用いて
![\displaystyle{(2)\quad \Sigma= \left[\begin{array}{cc} \Sigma_1 \\ 0_{n-m\times m} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-fb26168bb73afdeec58e889df3c86b18_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(4)\quad U= \left[\begin{array}{cc} U_1(n\times m) & U_2(n\times n-m) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8aea26086017ec7538b8e51ab9ce5870_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(5)\quad x_{r}(t)= \underbrace{ \left[\begin{array}{cc} U_2 & U_1 \end{array}\right] }_{T_r} x(t) \Leftrightarrow x(t)=T_r^Tx_r(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5184bad3387c61eb183d195713a21621_l3.png "Rendered by QuickLaTeX.com")
 に注意)
に注意)![\displaystyle{(6)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} \dot{x}_{r1}(t)\\ \dot{x}_{r2}(t) \end{array}\right] }_{\dot{x}_r(t)} = \underbrace{ \left[\begin{array}{cc} A_{r11} & A_{r12} \\ A_{r21} & A_{r22} \\ \end{array}\right] }_{A_r=T_rAT_r^T} \underbrace{ \left[\begin{array}{c} x_{r1}(t)\\ x_{r2}(t) \end{array}\right] }_{x_r(t)} + \underbrace{ \left[\begin{array}{c} 0\\ \Sigma_1V^T \end{array}\right] }_{B_r=T_rB} u(t)\\ + \underbrace{ \left[\begin{array}{l} f_{ru}(t,x)\\ f_{rm}(t,x,u) \end{array}\right] }_{f_r(t,x,u)=T_rf(t,x,u)} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-37c0842a8446b8a7abc1cbf016179aba_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(7)\quad s(t)= \underbrace{ \left[\begin{array}{cc} S_{r1} & S_{r2} \\ \end{array}\right] }_{S_r=ST_r^T} \underbrace{ \left[\begin{array}{c} x_{r1}(t)\\ x_{r2}(t) \end{array}\right] }_{x_r(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-988fe8c3933d54a6b2a2343fa71b6828_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(2)\quad \underbrace{ \left[\begin{array}{c} \dot{\theta}\\ \dot{\omega}\\ \dot{i}_a \end{array}\right] }_{\dot{x}} = \underbrace{ \left[\begin{array}{cc|c} 0 & 1 & 0\\ 0 & 0 & \frac{K_t}{J_0}\\\hline 0 & -\frac{K_e}{L_0} & -\frac{R}{L_0} \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} \theta\\ \omega\\ i_a \end{array}\right] }_{x} + \underbrace{ \left[\begin{array}{c} 0\\ 0\\\hline \frac{1}{L_0} \end{array}\right] }_{B} \underbrace{ v_a }_{u} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f34e214e8999446dc4f74a57bf7ab251_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(3)\quad s= \underbrace{ \left[\begin{array}{ccc} \frac{J_0}{K_t}\omega_n^2 & 2\frac{J_0}{K_t}\zeta\omega_n & 1 \end{array}\right] }_{S}x \quad(M= \left[\begin{array}{ccc} \frac{J_0}{K_t}\omega_n^2 & 2\frac{J_0}{K_t}\zeta\omega_n \end{array}\right]) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-37b3f655680fcf1663a507a6815010ae_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(6)\quad \dot{x}=Ax+Bu+ \left[\begin{array}{c} 0\\ f_{u}\\ f_{m} \end{array}\right]%} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-403044bf0348dcd88eba34f879facf92_l3.png "Rendered by QuickLaTeX.com")

 と
と は次のように特定できます。
は次のように特定できます。

 と
と は次のように特定できます。
は次のように特定できます。


 への収束は保証されないので、2次安定性
への収束は保証されないので、2次安定性
 について
について が可制御対
が可制御対 
 も可制御対」
も可制御対」![\displaystyle{(1)\quad \begin{array}{l} {\rm rank}\left[\begin{array}{cc} B & \lambda I_n-A \end{array}\right]\\ = {\rm rank}\left[\begin{array}{ccc} 0 & A_{11}-\lambda I_m & A_{12}\\ B_{2} & A_{21} & A_{22}-\lambda I_m \end{array}\right]\\ = {\rm rank}\left[\begin{array}{ccc} A_{11}-\lambda I_m & A_{12} \end{array}\right]+m \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-585e01601ba9a848826ac5abbfdf9019_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(2)\quad {\rm rank}\left[\begin{array}{cc} B & \lambda I_n-A \end{array}\right]=n \Leftrightarrow {\rm rank}\left[\begin{array}{ccc} A_{12} & A_{11}-\lambda I_m \end{array}\right]=n-m }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b5dc35ef95985083953d0095b0670999_l3.png "Rendered by QuickLaTeX.com")

![\left[\begin{array}{cc} A & B\\ C & 0 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-366145f20eab272791eca847d5d80e79_l3.png "Rendered by QuickLaTeX.com") の一般化固有値すなわち
の一般化固有値すなわち![\displaystyle{(3)\quad \left[\begin{array}{cc} A & B\\ C & 0 \end{array}\right] \left[\begin{array}{cc} v_\lambda\\ u_\lambda \end{array}\right] =\lambda \left[\begin{array}{cc} I_n & 0\\ 0 & 0 \end{array}\right] \left[\begin{array}{cc} v_\lambda\\ u_\lambda \end{array}\right]\quad (\left[\begin{array}{cc} v_\lambda\\ u_\lambda \end{array}\right]\ne0) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-df307f20509f150f2fdd3e5d4d9add2f_l3.png "Rendered by QuickLaTeX.com")
 として定義されます。これから次式が成り立ちます。
として定義されます。これから次式が成り立ちます。
 に対する応答が零になることを意味しています。
に対する応答が零になることを意味しています。![\displaystyle{(5)\quad {\rm det}\left[\begin{array}{cc} \lambda I_n-A & -B\\ -C & 0 \end{array}\right]=0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ae45806f0cf9fb4c995c4074227d1b71_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(7)\quad \begin{array}{l} {\rm det}\left[\begin{array}{cc} \lambda I_n-A & -B\\ -S & 0 \end{array}\right]\\ = {\rm det}\left[\begin{array}{ccc} \lambda I_{n-m}-A_{11} & -A_{12} & 0\\ -A_{21} & \lambda I_m-A_{22} & -B_{2}\\ -S_1 & -S_2 & 0 \end{array}\right]=0\\ \Leftrightarrow {\rm det}\left[\begin{array}{ccc} \lambda I_{n-m}-A_{11} & -A_{12} \\ -S_1 & -S_2 \end{array}\right]=0\\ \Leftrightarrow{\rm det} \left[\begin{array}{cc} I_{n-m} & -A_{12}S_2^{-1} \\ 0 & I_m \end{array}\right]\left[\begin{array}{cc} \lambda I_{n-m}-\bar{A}_{11} & 0 \\ 0 & -S_2 \end{array}\right] \left[\begin{array}{cc} I_{n-m} & 0 \\ M & I_m \end{array}\right]\\ ={\rm det}(\lambda I_{n-m}-\bar{A}_{11}){\rm det}(-S_2)=0\\ \Leftrightarrow {\rm det}(\lambda I_{n-m}-\bar{A}_{11})=0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-571e2b9312a22e1a6842d8c5bcbcb33f_l3.png "Rendered by QuickLaTeX.com")


 を定義するスイッチング関数を決定せよ。
を定義するスイッチング関数を決定せよ。 )ことのできるスライディングモード制御則(SMC則)を設計せよ。
)ことのできるスライディングモード制御則(SMC則)を設計せよ。


 は正則行列であることを仮定しています。また設計パラメータは、安定行列
は正則行列であることを仮定しています。また設計パラメータは、安定行列 です。
です。 は次式から定まる正定行列です。
は次式から定まる正定行列です。
 、すなわち
、すなわち
 において、スライディングモード時の制御則は等価制御と呼ばれ、次式のように求められます。
において、スライディングモード時の制御則は等価制御と呼ばれ、次式のように求められます。


 の場合、適合サイズをもつ行列
の場合、適合サイズをもつ行列 を用いて
を用いて


![\displaystyle{ \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{x}_2(t) \end{array}\right]= \underbrace{ \left[\begin{array}{cc} 0 & 1\\ 0 & 0 \end{array}\right] }_{A} \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right]+ \underbrace{ \left[\begin{array}{c} 0\\ 1 \end{array}\right] }_{B} u(t)+ \underbrace{ \left[\begin{array}{c} 0\\ -a\sin x_1(t) \end{array}\right] }_{f} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5f207f5d4fc2ee68a8e5cbb3983a83af_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ s(t)= \underbrace{ \left[\begin{array}{cc} m & 1 \end{array}\right] }_{S} \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3a1328c53082e4bc421dbdb031541ce8_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ u_\ell(t)=- \left[\begin{array}{cc} -m\Phi & m-\Phi \end{array}\right] \left[\begin{array}{cc} x_1(t)\\ x_2(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a8cc811884aa51ea166ddc0e5a66bfa9_l3.png "Rendered by QuickLaTeX.com")
 を改めて
を改めて![\displaystyle{(14)\quad u(t)=- \left[\begin{array}{cc} m\Phi & m+\Phi \end{array}\right] \left[\begin{array}{cc} x_1(t)\\ x_2(t) \end{array}\right] -\rho\frac{s(t)}{|s(t)|} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3df81a809ae21d1cac350d568572a770_l3.png "Rendered by QuickLaTeX.com")
 上の剛体振子の状態方程式についてマッチング条件(12)を調べよ。
上の剛体振子の状態方程式についてマッチング条件(12)を調べよ。
![\displaystyle{(2)\quad A= \left[\begin{array}{cccc|c} 0 & 1 & 0 & \cdots & 0 \\ 0 & 0 & 1 & 0 & \vdots \\ \vdots & & \ddots & \ddots & 0 \\ 0 & \cdots & \cdots & 0 & 1 \\\hline -a_1 & -a_2 & \cdots & \cdots & -a_n \end{array}\right],\quad B=\left[\begin{array}{c} 0 \\ 0 \\ \vdots \\ 0 \\\hline 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ef11f7c43ce31771dd5871c77048689e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(3)\quad \begin{array}{r} \Delta A(t)= \left[\begin{array}{cccc|c} 0 & 0 & 0 & \cdots & 0 \\ 0 & 0 & 0 & 0 & \vdots \\ \vdots & & \ddots & \ddots & 0 \\ 0 & \cdots & \cdots & 0 & 0 \\\hline -\delta_1(t) & -\delta_2(t) & \cdots & \cdots & -\delta_n(t) \end{array}\right]\\ k_i^-\le\delta_i(t)\le k_i^+\quad(i=1,\cdots,n) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-34525207b48d6d25b7f649dbf4d8bc0a_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(5)\quad S=\left[\begin{array}{ccccc} m_1 & m_2 & \cdots & m_{n-1} & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5b01d4cae8fa75abe21574cd203c0c2d_l3.png "Rendered by QuickLaTeX.com")


 とおいて
とおいて


 を満足しSMC則になることを示します。
を満足しSMC則になることを示します。


 を選ぶと
を選ぶと
 において、
において、 を意味します。そこで平衡状態が乱されて
を意味します。そこで平衡状態が乱されて となる時刻を
となる時刻を にとると、線形状態方程式は次式となります。
にとると、線形状態方程式は次式となります。





 ただし、
ただし、 は可観測対
は可観測対



 をかけて
をかけて
 は可観測対なので条件A3を適用して(
は可観測対なので条件A3を適用して( をはずして)
をはずして) ただし、
ただし、

 と
と






![\displaystyle{(15)\quad \left[\begin{array}{c} \dot{\theta}(t) \\ \dot{\omega}(t) \end{array}\right] = \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -4 & -1 \end{array}\right] }_{A} \left[\begin{array}{c} \theta(t) \\ \omega(t) \end{array}\right] + \underbrace{\left[\begin{array}{c} 0 \\ 1 \end{array}\right]}_{D}\underbrace{\sin(2t)}_{\xi(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-686b73217e57bd77cd759540d3fae61f_l3.png "Rendered by QuickLaTeX.com")
 は安定行列なので、リャプノフ方程式
は安定行列なので、リャプノフ方程式 を満足する
を満足する![\displaystyle{(16)\quad P=\left[\begin{array}{cc} 2.6250 & 0.1250\\ 0.1250 & 0.6250 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e7f46140d6134ad28068dd78b46c48e4_l3.png "Rendered by QuickLaTeX.com")
 をもつリャプノフ関数(10)に対して
をもつリャプノフ関数(10)に対して

 となって原点に漸近していきますが、
となって原点に漸近していきますが、 になるとそれは保証されないことが分かります(図1参照)。
になるとそれは保証されないことが分かります(図1参照)。 図1 モデルの不確かさがある場合の解軌道
図1 モデルの不確かさがある場合の解軌道
![\displaystyle{(2)\quad \frac{d}{dt} \underbrace{\left[\begin{array}{c} \theta(t) \\ \omega(t) \end{array}\right]}_{x} = \underbrace{ \left[\begin{array}{c} \omega(t) \\ -\frac{mg\ell}{J}\sin\theta(t)-\frac{c}{J}\omega(t) \end{array}\right] }_{f(x)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3b7ba41f7598be72c8ae81339591673c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(3)\quad V=\frac{1}{2} \underbrace{ \left[\begin{array}{c} \theta(t) \\ \omega(t) \end{array}\right]^T \left[\begin{array}{cc} \frac{1}{2}\frac{c^2}{J} & \frac{1}{2}c \\ \frac{1}{2}c & J \end{array}\right] \left[\begin{array}{c} \theta(t) \\ \omega(t) \end{array}\right] }_{x^T(t)Px(t)} +mg\ell(1-\cos\theta(t))>0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-98c8ff12c9923ef1a298272fc344e4e4_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(4)\quad \begin{array}{l} \dot{V}(t)=\frac{1}{2}(x^TP\dot{x}+\dot{x}^TPx)+mg\ell\omega\sin\theta =x^TP\dot{x}+mg\ell\omega\sin\theta\\ =\left[\begin{array}{c} \theta \\ \omega \end{array}\right]^T \left[\begin{array}{cc} p_1 & p_3 \\ p_3 & p_2 \end{array}\right] \left[\begin{array}{c} \omega \\ -\frac{mg\ell}{J}\sin\theta-\frac{c}{J}\omega \end{array}\right]+mg\ell\omega\sin\theta\\ =\left[\begin{array}{cc} \theta &\omega \end{array}\right] \left[\begin{array}{cc} p_1\omega -p_3(\frac{mg\ell}{J}\sin\theta+\frac{c}{J}\omega) \\ p_3\omega -p_2(\frac{mg\ell}{J}\sin\theta+\frac{c}{J}\omega) \end{array}\right]+mg\ell\omega\sin\theta\\ =p_1\theta\omega -p_3(\frac{mg\ell}{J}\theta\sin\theta+\frac{c}{J}\theta\omega)+ p_3\omega^2 -p_2(\frac{mg\ell}{J}\omega\sin\theta+\frac{c}{J}\omega^2)+mg\ell\omega\sin\theta\\ =-\frac{mg\ell}{J}\sin\theta(p_3\theta+p_2\omega-J\omega) +(p_3-p_2\frac{c}{J})\omega^2+(p_1-p_3\frac{c}{J})\theta\omega \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6c783b4a46a73e78fb425f69bfa45499_l3.png "Rendered by QuickLaTeX.com")
 、
、 、
、 を代入して
を代入して

![\displaystyle{(7)\quad \left[\begin{array}{c} \dot{\theta}(t) \\ \dot{\omega}(t) \end{array}\right] = \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\frac{mg\ell}{J} & -\frac{c}{J} \end{array}\right] }_{A} \left[\begin{array}{c} \theta(t) \\ \omega(t) \end{array}\right] + \underbrace{ \left[\begin{array}{c} 0 \\ \frac{mg\ell}{J} \end{array}\right] }_{D} \underbrace{ (\theta(t)-\sin\theta(t)) }_{\xi(x)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0c7be17a5704d87667dc74b647c5f7da_l3.png "Rendered by QuickLaTeX.com")
 自体が限りなく零に近づき(
自体が限りなく零に近づき( )、線形系となると考えられます。
)、線形系となると考えられます。![\displaystyle{ A= \left[\begin{array}{cc} 0 & 1 \\ -4 & -1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c6c1c66e1cf7b93bac3aad84f54e9744_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ P=\left[\begin{array}{cc} 2.6250 & 0.1250\\ 0.1250 & 0.6250 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3885fe14c47a46dd2be67bc40c3c8e75_l3.png "Rendered by QuickLaTeX.com")
 の解を求めることに注意します。
の解を求めることに注意します。 に対するリャプノフ行列と呼ぶことがあります。
に対するリャプノフ行列と呼ぶことがあります。
 を含む領域
を含む領域  を考える。いま
を考える。いま 







 に対して、特異値(固有値に等しい)を
に対して、特異値(固有値に等しい)を
 に対して
に対して








 を対角行列に選ぶときは等号が成り立ち、(8)において
を対角行列に選ぶときは等号が成り立ち、(8)において を用いることができます。もう少し詳しくは、対称行列
を用いることができます。もう少し詳しくは、対称行列 と
と が可換(
が可換( )で、
)で、 と
と を対角行列とする
を対角行列とする が存在)の場合には等号が成り立ち、(8)において
が存在)の場合には等号が成り立ち、(8)において (サイズ
(サイズ
 は
は は
は を満たす
を満たす

 を用いて線形写像
を用いて線形写像 を考えると、これは3つの線形写像に分解されます。
を考えると、これは3つの線形写像に分解されます。
 次元ベクトル
次元ベクトル のノルムとして、次の2ノルムを考えます。
のノルムとして、次の2ノルムを考えます。








![\displaystyle{(1)\quad \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{x}_2(t) \end{array}\right]= \left[\begin{array}{cc} x_2(t)\\ -a\sin x_1(t)+u(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d53871664182d43865c23953df0509d7_l3.png "Rendered by QuickLaTeX.com")



![\displaystyle{(5)\quad u(t)=- \left[\begin{array}{cc} f_1 & f_2 \end{array}\right] \left[\begin{array}{cc} x_1(t)\\ x_2(t) \end{array}\right] -\rho\,{\rm sgn}(s(t)) %\frac{s(t)}{|s(t)|} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7eb5e8e71fc701c73e0f51475649070f_l3.png "Rendered by QuickLaTeX.com")
 というパラメータも導入されており、高速スイッチングする操作入力の振幅を表しています。このとき、次式を得ます。
というパラメータも導入されており、高速スイッチングする操作入力の振幅を表しています。このとき、次式を得ます。
 ,
,  と選ぶと、
と選ぶと、 に注意して
に注意して
 に対して
に対して

![\displaystyle{(10)\quad { u(t)=- \left[\begin{array}{cc} 0 & m \end{array}\right] \left[\begin{array}{cc} x_1(t)\\ x_2(t) \end{array}\right] -\rho\,{\rm sgn}(s(t)) %\frac{s(t)}{|s(t)|} }}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d80e27921549cfc087dc5335e8fd033d_l3.png "Rendered by QuickLaTeX.com")
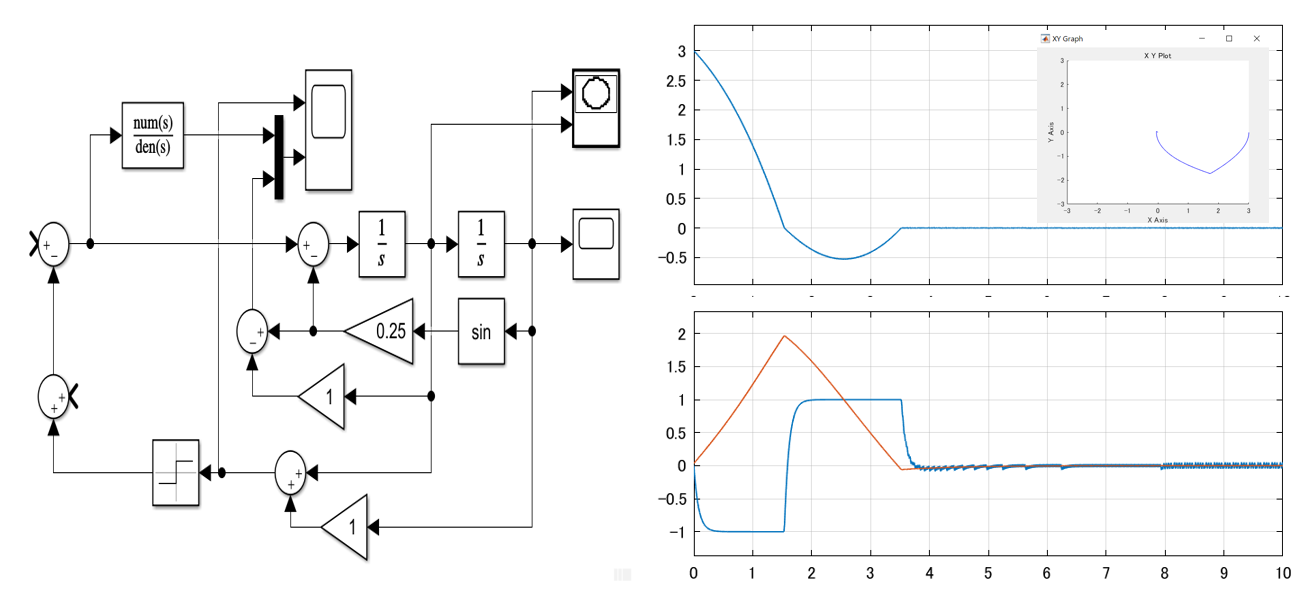
 のときの状態軌道
のときの状態軌道 図2
図2  の制御則(5)の下での状態軌道
の制御則(5)の下での状態軌道


 も小さくせざる得ず、このことはスライディング直線に到達する速さに影響を与えます。
も小さくせざる得ず、このことはスライディング直線に到達する速さに影響を与えます。 を導入して、制御則(10)を次のように変更してみます。
を導入して、制御則(10)を次のように変更してみます。![\displaystyle{(14)\quad { u(t)=- \left[\begin{array}{cc} m\Phi & m+\Phi \end{array}\right] \left[\begin{array}{cc} x_1(t)\\ x_2(t) \end{array}\right] -\rho\,{\rm sgn}(s(t)) %\frac{s(t)}{|s(t)|} }}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bcbe05d86a03ea11f4b5c6e6b42dcdfc_l3.png "Rendered by QuickLaTeX.com")


 となる速さを決めていることを意味しています。
となる速さを決めていることを意味しています。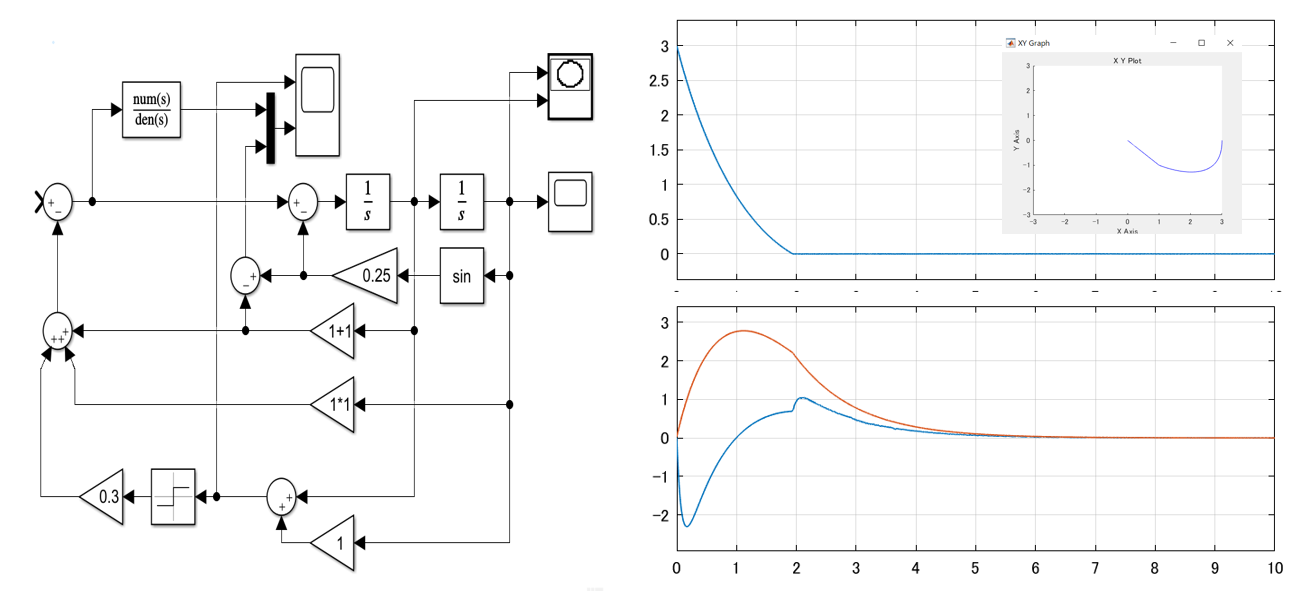
 の制御則(14)の下での状態軌道
の制御則(14)の下での状態軌道![\displaystyle{(17)\quad { u(t)=- \left[\begin{array}{cc} m\Phi & m+\Phi \end{array}\right] \left[\begin{array}{cc} x_1(t)\\ x_2(t) \end{array}\right] -\rho\frac{s(t)}{|s(t)|+\delta}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b9ac1d7f6dc5917c2484d09cd276299f_l3.png "Rendered by QuickLaTeX.com")
 は適切に選ばれた定数です。
は適切に選ばれた定数です。![\displaystyle{(1)\quad \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{x}_2(t) \end{array}\right]= \left[\begin{array}{cc} 0 & 1\\ 0 & 0 \end{array}\right] \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right]+ \left[\begin{array}{c} 0\\ 1 \end{array}\right] u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-70926b3db58fa2acd071423f43c950ef_l3.png "Rendered by QuickLaTeX.com")



 の解は(
の解は( に注意して)
に注意して)
![\displaystyle{(6)\quad \exp( \left[\begin{array}{cc} 0 & 1\\ 0 & 0 \end{array}\right]\tau) = \left[\begin{array}{cc} 1 & \tau \\ 0 & 1 \end{array}\right] \Rightarrow \exp(A\tau)B= \left[\begin{array}{cc} 1 & \tau \\ 0 & 1 \end{array}\right] \left[\begin{array}{c} 0\\ 1 \end{array}\right] = \left[\begin{array}{c} \tau \\ 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-90cfe2ccca502afbd81affe9cf34b190_l3.png "Rendered by QuickLaTeX.com")

 、
、 のときの状態軌道を図1に示します。
のときの状態軌道を図1に示します。
 の上側と下側にある(横に寝た)放物線を切り替えて状態軌道が構成されていることが分かります。ところが、原点に近くなると奇妙な現象が生じます。
の上側と下側にある(横に寝た)放物線を切り替えて状態軌道が構成されていることが分かります。ところが、原点に近くなると奇妙な現象が生じます。 のときの状態軌道を図2に示します。
のときの状態軌道を図2に示します。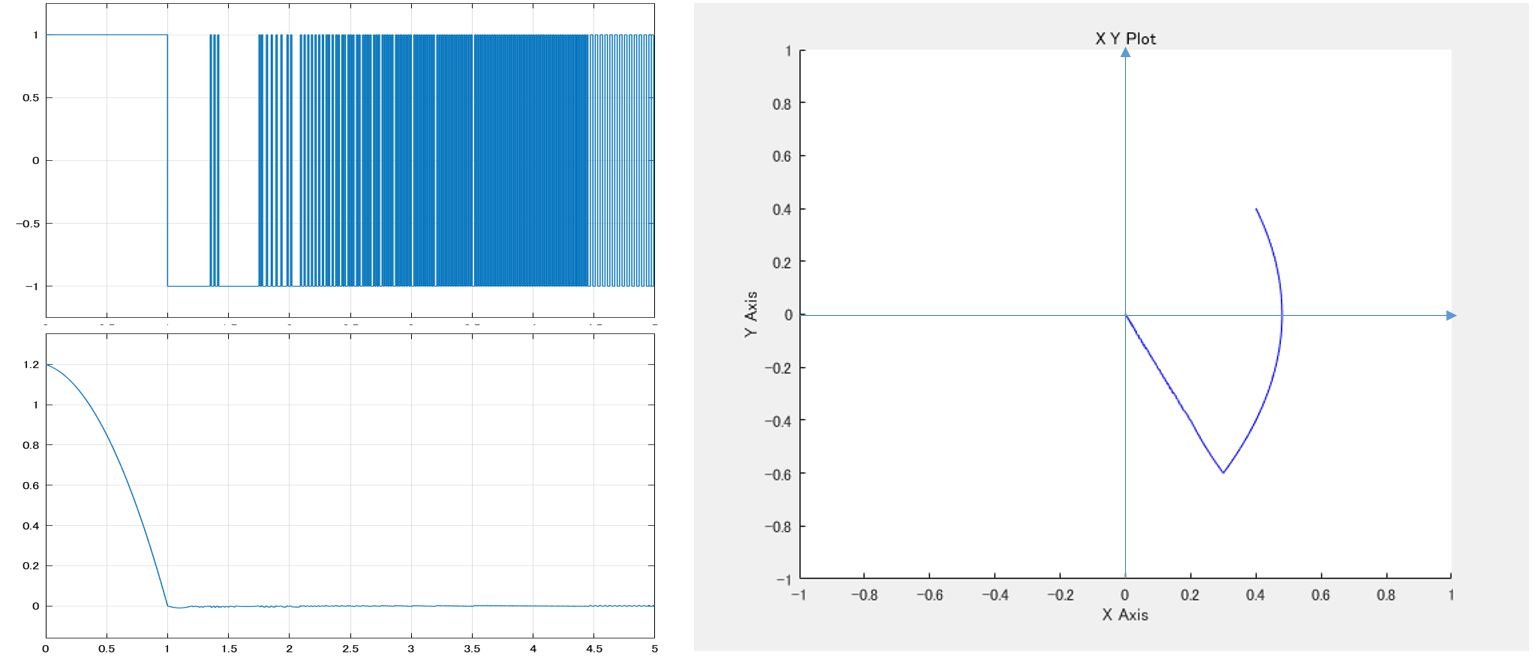


 平面における
平面における のとき
のとき なので切片
なので切片 のとき
のとき なので切片
なので切片


 に対して、可到達条件
に対して、可到達条件



 を通したものが等価制御とよく合っていることがわかります。この1次システムはアクチュエータのダイナミックス(による帯域制限)を表しているとみなすことができます。
を通したものが等価制御とよく合っていることがわかります。この1次システムはアクチュエータのダイナミックス(による帯域制限)を表しているとみなすことができます。
 )
)
 ,
,  とおいて、次の非線形状態方程式を得ます。
とおいて、次の非線形状態方程式を得ます。![\displaystyle{(19)\quad \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{x}_2(t) \end{array}\right]= \left[\begin{array}{cc} x_2(t)\\ -a\sin x_1(t)+u(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5b7fa02378b55b47fc0089c7e2d0942e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(20)\quad \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{x}_2(t) \end{array}\right]= \left[\begin{array}{cc} 0 & 1\\ 0 & 0 \end{array}\right] \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right]+ \left[\begin{array}{c} 0\\ 1 \end{array}\right] u(t)+ \left[\begin{array}{c} 0\\ -a\sin x_1(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c6416f088bdbed92e5a6cab7c09eb450_l3.png "Rendered by QuickLaTeX.com")
 とした場合のシミュレーション結果です。一見、図3と変わらないように見えます。
とした場合のシミュレーション結果です。一見、図3と変わらないように見えます。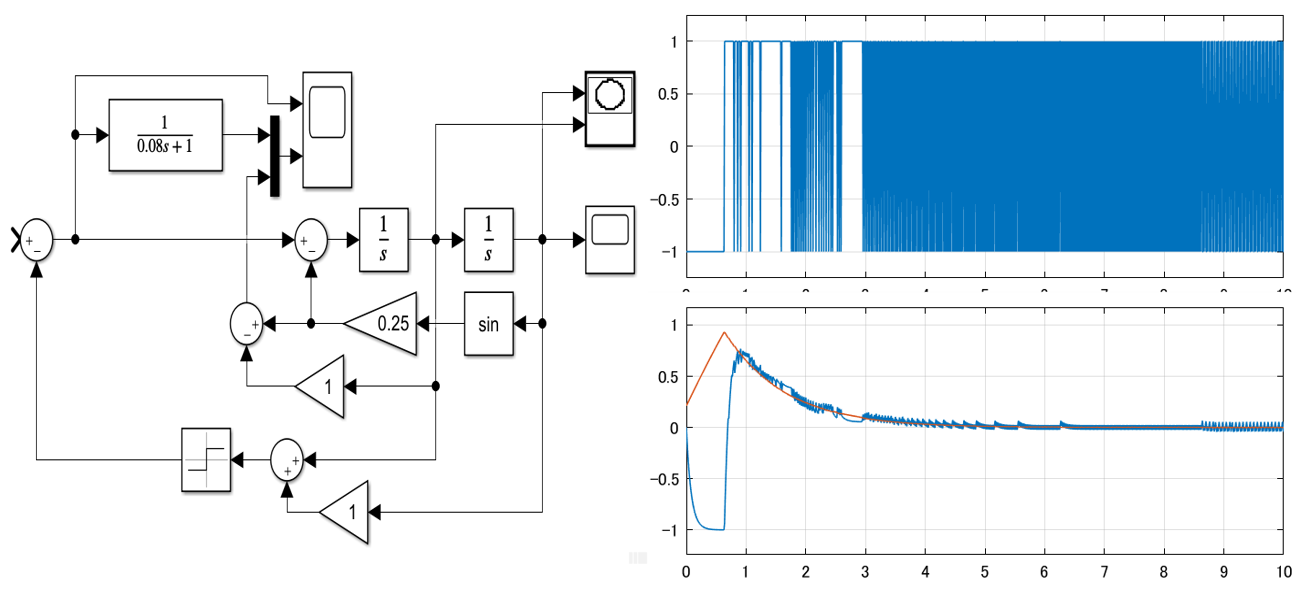

![\displaystyle{(1a)\quad \underbrace{ \left[\begin{array}{c|ccc} \alpha & m_1 & \dots &m_N \\ \hline m_1 & 1 & & 0 \\ \vdots & & \ddots & \\ m_N & 0 & & 1 \\ \end{array}\right] }_{M=\left[\begin{array}{cc} M_{11} & M_{12} \\ M_{21} & M_{22} \end{array}\right]} \underbrace{ \left[\begin{array}{c} \ddot{\theta} \\ \hline \ddot{r}_1 \\ \vdots \\ \ddot{r}_N \end{array}\right] }_{\ddot{\xi}} + \underbrace{ \left[\begin{array}{c|ccc} 0 & 0 & \dots &0 \\ \hline 0 & \Omega_1^2 & & 0 \\ \vdots & & \ddots & \\ 0 & 0 & & \Omega_N^2 \\ \end{array}\right] }_{K=\left[\begin{array}{cc} K_{11} & K_{12} \\ K_{21} & K_{22} \end{array}\right]} \underbrace{ \left[\begin{array}{c} \theta \\ \hline r_1 \\ \vdots \\ r_N \end{array}\right] }_{\xi} = \underbrace{ \left[\begin{array}{c} 1 \\ \hline 0 \\ \vdots \\ 0 \end{array}\right] }_{B_2} u' }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-346490e79fcc2267740093f5fde47d5f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(1b)\quad \eta(\xi)= \underbrace{ \left[\begin{array}{c|ccc} 0 & \phi_1(\xi) & \dots &\phi_N(\xi) \end{array}\right] }_{C_1} \underbrace{ \left[\begin{array}{c} \theta \\ \hline r_1 \\ \vdots \\ r_N \end{array}\right] }_{\xi} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8a564535f5712a1756e4d97b569ada10_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(2a)\quad \underbrace{ \left[\begin{array}{c} \dot{\xi} \\ \ddot{\xi} \end{array}\right] }_{\dot{x}} = \underbrace{ \left[\begin{array}{cc} 0_{N+1\times N+1} & I_{N+1} \\ M^{-1}K & 0_{N+1\times N+1} \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} \xi \\ \dot{\xi} \end{array}\right] }_{x} + \underbrace{ \left[\begin{array}{cc} 0_{N+1\times 1} \\ M^{-1}B_2 \end{array}\right] }_{B} u'}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-524df64b74898d10a9e6574263d3ca12_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(2b)\quad \eta(\xi)= \underbrace{ \left[\begin{array}{cc} C_1 & 0_{1\times N} \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} \xi \\ \dot{\xi} \end{array}\right] }_{x} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6e8294598be55b2b237fc74f95338ce8_l3.png "Rendered by QuickLaTeX.com")
 を用いて
を用いて
![\displaystyle{(4)\quad \underbrace{ \left[\begin{array}{c} m_1 \\ \vdots \\ m_N \\ \end{array}\right] }_{M_{21}} \ddot{\theta} + \underbrace{ \left[\begin{array}{c} \ddot{r}_1 \\ \vdots \\ \ddot{r}_N \end{array}\right] }_{\ddot{r}} + \underbrace{ \left[\begin{array}{ccc} \Omega_1^2 & & 0 \\ & \ddots & \\ 0 & & \Omega_N^2 \\ \end{array}\right] }_{K_{22}} \underbrace{ \left[\begin{array}{c} r_1 \\ \vdots \\ r_N \end{array}\right] }_{r} = \left[\begin{array}{c} 0 \\ \vdots \\ 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-83e03635bb43c77e2201d7335edf4248_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(7a)\quad \underbrace{ \left[\begin{array}{c} \dot{z} \\ \dot{\theta} \\\hline \ddot{z} \\ \ddot{\theta} \end{array}\right] }_{\dot{x}} = \underbrace{ \left[\begin{array}{cc|cc} 0_{N\times N} & 0_{N\times 1} & I_N & 0_{N\times 1} \\ 0_{1\times N} & 0 & 0_{1\times N} & 1 \\\hline -K_{22} & K_{22}M_{21} & 0_{N\times N} & 0_{N\times 1} \\ 0_{1\times N} & 0 & 0_{1\times N} & -\frac{1}{T_a} \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} {z} \\ {\theta} \\\hline \dot{z} \\ \dot{\theta} \end{array}\right] }_{x} + \underbrace{ \left[\begin{array}{cc} 0_{N\times 1} \\ 0 \\\hline 0_{N\times 1} \\ \frac{1}{T_a} \end{array}\right] }_{B} \dot{\theta}_c}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4e568bda7882b131b5b24ac100e86af6_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(7b)\quad \eta(\xi)= \underbrace{ \left[\begin{array}{ccc} \phi_1(\xi) & \cdots & \phi_N(\xi) \end{array}\right] \left[\begin{array}{cc|cc} I_N & -M_{21} & 0_{N\times N} & 0_{N\times 1} \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} {z} \\ {\theta} \\\hline \dot{z} \\ \dot{\theta} \end{array}\right] }_{x} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4598350d67871b8cea2146c9120e81d4_l3.png "Rendered by QuickLaTeX.com")
 m
m m
m kg/m
kg/m
 N/mm
N/mm
 m
m
 m
m kgm
kgm kg
kg
 [m]、断面積を
[m]、断面積を [N/m
[N/m [m
[m [kgm
[kgm [kg]とします。また、時刻
[kg]とします。また、時刻 [sec]における、ハブの回転角を
[sec]における、ハブの回転角を [rad]、ハブの支持点から距離
[rad]、ハブの支持点から距離 [m]のビーム上の点の弾性変位を
[m]のビーム上の点の弾性変位を [m]、その点の座標を
[m]、その点の座標を とします。
とします。
 、
、 をそれぞれ
をそれぞれ 、
、 と略記すると、次式が成り立ちます。
と略記すると、次式が成り立ちます。




 、
、 をそれぞれ
をそれぞれ 、
、 と略記し、次の基本式を多用します。
と略記し、次の基本式を多用します。 ,
,
 ,
, 
 ,
, 







![\displaystyle{(6e)\quad \int_{t_0}^{t_1}\delta T_0 dt= \int_{t_0}^{t_1} J_0\dot{\theta}\delta\dot{\theta} dt = \left[J_0\dot{\theta}\delta{\theta} \right]_{t_0}^{t_1} -\int_{t_0}^{t_1} J_0\ddot{\theta}\delta{\theta} dt = -\int_{t_0}^{t_1} J_0\ddot{\theta}\delta{\theta} dt }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-188737b6a02bf15189c6670c902bf6fb_l3.png "Rendered by QuickLaTeX.com")













![\displaystyle{ +\left[\rho A \int_0^{L} (x^2+{y}^2)\dot{\theta}+x\dot{y})\delta{\theta}dx\right]_{t_0}^{t_1}-\int_{t_0}^{t_1}\rho A \int_0^{L} \frac{d}{dt}((x^2+{y}^2)\dot{\theta}+x\dot{y})\delta{\theta}dxdt }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f2118385d5eb945d389e6974e74e24cb_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ +\left[\rho A \int_0^{L} (x\dot{\theta}+\dot{y}) \delta{y}dx\right]_{t_0}^{t_1}-\int_{t_0}^{t_1}\rho A \int_0^{L}\frac{d}{dt}(x\dot{\theta}+\dot{y})\delta{y}dxdt }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-cc6f74dcfcb568ed2b50d8e94189dc56_l3.png "Rendered by QuickLaTeX.com")















![\displaystyle{ = EI \left[y'' \delta y'\right]_0^{L} - EI \int_0^{L} y''' \delta y' dx }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1272a7b09905372a91afaa5d282bda30_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ = EI y''(L) \delta y'(L)-EI \left[y''' \delta y\right]_0^{L} + EI \int_0^{L} y'''' \delta y dx }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9dea5445a535657182870cfd28ab98df_l3.png "Rendered by QuickLaTeX.com")





























 が微小であるとして、次のように近似します。
が微小であるとして、次のように近似します。
 が微小であるとして、次のように近似します。
が微小であるとして、次のように近似します。

 第1式(14a’):
第1式(14a’):
 第2式(14b):
第2式(14b):
 第3式(14c):
第3式(14c):
 第4式(13d):
第4式(13d):
 、代表トルク
、代表トルク として、無次元化した柔軟ビームの運動方程式は次式となります。
として、無次元化した柔軟ビームの運動方程式は次式となります。







 を仮定すると
を仮定すると


 を行います。
を行います。


 ,
,  を仮定しますと
を仮定しますと














 が満足すべき制約式を次のように得ます。
が満足すべき制約式を次のように得ます。









 としますと、次のモード関数群を得たことになります。
としますと、次のモード関数群を得たことになります。

 )。
)。![\displaystyle{(24a)\quad \int_0^1 \phi''_i\phi''_jd\xi=[ \phi''_i\phi'_j]_0^1-\int_0^1 \phi'''_i\phi'_jd\xi}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-58d1f4e466331be3b8a7ca664923dbcf_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{=-[ \phi'''_i\phi_j]_0^1+\int_0^1 \phi''''_i\phi_jd\xi}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bd0527fb3a801a0118a1f48ee8726b75_l3.png "Rendered by QuickLaTeX.com")









 を、モード関数
を、モード関数 を時間関数
を時間関数 で重み付けて
で重み付けて





![\displaystyle{(28)\quad \int_0^{1} \phi_j \eta'''' d\xi=[ \phi_j\eta''']_0^1-\int_0^1 \phi'_j\eta'''d\xi}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9900037887c5a7b37a3765e0847e7d38_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{=\phi_j(1)\eta'''(1)-[\phi'_j\eta'']_0^1+\int_0^1 \phi''_j\eta''d\xi}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-72792f2652c34f9cbbff2179eb63f734_l3.png "Rendered by QuickLaTeX.com")









![\displaystyle{(31a)\quad \underbrace{ \left[\begin{array}{c|ccc} \alpha & m_1 & \dots &m_N \\ \hline m_1 & 1 & & 0 \\ \vdots & & \ddots & \\ m_N & 0 & & 1 \\ \end{array}\right] }_{M=\left[\begin{array}{cc} M_{11} & M_{12} \\ M_{21} & M_{22} \end{array}\right]} \underbrace{ \left[\begin{array}{c} \ddot{\theta} \\ \hline \ddot{r}_1 \\ \vdots \\ \ddot{r}_N \end{array}\right] }_{\ddot{\xi}} + \underbrace{ \left[\begin{array}{c|ccc} 0 & 0 & \dots &0 \\ \hline 0 & \Omega_1^2 & & 0 \\ \vdots & & \ddots & \\ 0 & 0 & & \Omega_N^2 \\ \end{array}\right] }_{K=\left[\begin{array}{cc} K_{11} & K_{12} \\ K_{21} & M_{22} \end{array}\right]} \underbrace{ \left[\begin{array}{c} \theta \\ \hline r_1 \\ \vdots \\ r_N \end{array}\right] }_{\xi} = \underbrace{ \left[\begin{array}{c} 1 \\ \hline 0 \\ \vdots \\ 0 \end{array}\right] }_{B_2} u' }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-406d85fd430e037da5f5fde6fb0cad78_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(31b)\quad \eta(\xi)= \underbrace{ \left[\begin{array}{c|ccc} 0 & \phi_1(\xi) & \dots &\phi_N(\xi) \end{array}\right] }_{C_1} \underbrace{ \left[\begin{array}{c} \theta \\ \hline r_1 \\ \vdots \\ r_N \end{array}\right] }_{\xi} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ffc9ed02df3822a5d966a2c9ff2b13e0_l3.png "Rendered by QuickLaTeX.com")







![\displaystyle{(33a)\quad \underbrace{ \left[\begin{array}{c} \dot{\xi} \\ \ddot{\xi} \end{array}\right] }_{\dot{x}} = \underbrace{ \left[\begin{array}{cc} 0_{N+1\times N+1} & I_{N+1} \\ M^{-1}K & 0_{N+1\times N+1} \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} \xi \\ \dot{\xi} \end{array}\right] }_{x} + \underbrace{ \left[\begin{array}{cc} 0_{N+1\times 1} \\ M^{-1}B_2 \end{array}\right] }_{B} u'}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d04b4ccfb3bb84e6759113fd60916749_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(33b)\quad \eta(\xi)= \underbrace{ \left[\begin{array}{cc} C_1 & 0_{1\times N} \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} \xi \\ \dot{\xi} \end{array}\right] }_{x} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3fe155c9c292f0b7a39bf25b09174740_l3.png "Rendered by QuickLaTeX.com")
 が解
が解  が使われていることに注意してください。
が使われていることに注意してください。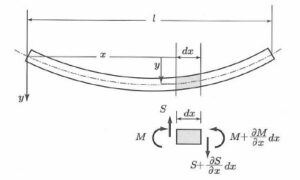



 ,
, 
 ,
, 

 ,
, 

 ,
, 

 ,
, 

 ,
, 

 ,
, 

 ,
, 





 )
)













 ピン・自由支持の場合 (
ピン・自由支持の場合 (




 ピン・質点付自由支持の場合
ピン・質点付自由支持の場合




 固定・固定支持の場合
固定・固定支持の場合




 固定・ピン支持の場合
固定・ピン支持の場合



 固定・自由支持の場合 (
固定・自由支持の場合 (




 固定・質点付自由支持の場合
固定・質点付自由支持の場合




 かつ
かつ
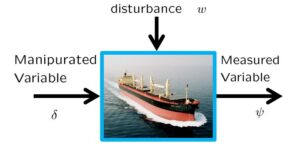
 が変動しますが、次式から舵は前進速度の2乗で効いてくることがわかります。
が変動しますが、次式から舵は前進速度の2乗で効いてくることがわかります。
 に注目しますと、次の表現もできます。
に注目しますと、次の表現もできます。



![\displaystyle{(7a)\quad \underbrace{ \left[\begin{array}{c} \dot{\psi}(t) \\ \dot{r}(t) \\ \dot{\delta}(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{ccc} 0 & 1 & 0\\ 0 & -\left(\frac{U}{U^*}\right)\frac{1}{T^*} & \left(\frac{U}{U^*}\right)^2\frac{K^*}{T^*} \\ 0 & 0 & -\frac{1}{T_a} \end{array}\right] }_{A(U,U^2)} \underbrace{ \left[\begin{array}{c} \psi(t) \\ r(t) \\ \delta(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{c} 0 \\ 0 \\ \frac{K_a}{T_a} \end{array}\right] }_{B} u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c40bbf2a01c1e41bb4cb2a38046541e9_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(7b)\quad \underbrace{ \psi(t) }_{y(t)} = \underbrace{ \left[\begin{array}{ccc} 1 & 0 & 0 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} \psi(t) \\ r(t) \\ \delta(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-faf87c1ef2f82cfeaf915946a02f861a_l3.png "Rendered by QuickLaTeX.com")


 を定義して
を定義して![\displaystyle{(8c)\quad \begin{array}{l} p_1(U,U^2)=\frac{1}{p_0}\det \left[\begin{array}{cc} U-U_3 & U_2-U_3 \\ U^2-U_1U_2 & U_2^2-U_1U_2 \\ \end{array}\right]\\ p_2(U,U^2)=\frac{1}{p_0}\det \left[\begin{array}{cc} U_1-U_3 & U-U_3 \\ U_1^2-U_1U_2 & U^2-U_1U_2 \\ \end{array}\right]\\ p_3(U,U^2)=\frac{1}{p_0}\det \left[\begin{array}{cc} U_1-U_2 & U_2-U \\ U_1^2-U_2^2 & U_2^2-U^2 \\ \end{array}\right]\\ p_0=\det \left[\begin{array}{cc} U_1-U_2 & U_2-U_3 \\ U_1^2-U_2^2 & U_2^2-U_1U_2 \\ \end{array}\right]\\ p_1(U,U^2)+p_2(U,U^2)+p_3(U,U^2)=1 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7b82416721e9f2c01e1e17b0b24b075c_l3.png "Rendered by QuickLaTeX.com")
 、
、 と仮想的な端点
と仮想的な端点 が作る3角形領域における変動をカバーすることができます。
が作る3角形領域における変動をカバーすることができます。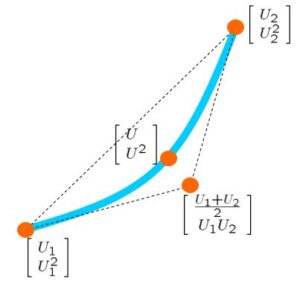
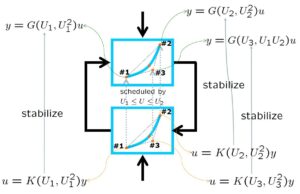
![\displaystyle{(9a)\quad P: \left\{\begin{array}{l} \left[\begin{array}{c} \dot{x} \\ \dot{x}_I \end{array}\right]= \underbrace{ \left[\begin{array}{cc} A(U,U^2)& 0 \\ -C & 0 \end{array}\right] }_{A(U,U^2)} \left[\begin{array}{c} x \\ x_I \end{array}\right] + \underbrace{ \left[\begin{array}{c} 0 \\ 1 \end{array}\right] }_{B_1} r + \underbrace{\left[\begin{array}{c} B \\ 0 \end{array}\right] }_{B_2} u\\ \underbrace{ \left[\begin{array}{c} y_{11} \\ y_{12} \end{array}\right] }_{y_1} = \underbrace{ \left[\begin{array}{cc} 0 &\omega_I\\ \omega_DCA(U,U^2) & 0 \end{array}\right] }_{C_1} \left[\begin{array}{c} x \\ x_I \end{array}\right] + \underbrace{ \left[\begin{array}{c} 0 \\ 0 \end{array}\right] }_{D_{11}} r + \underbrace{ \left[\begin{array}{c} 0 \\ \omega_DCB \end{array}\right] }_{D_{12}} u\\ \underbrace{ \left[\begin{array}{c} y \\ x_I \end{array}\right] }_{y_2} = \underbrace{ \left[\begin{array}{cc} C & 0\\ 0 & 1 \end{array}\right] }_{C_2} \left[\begin{array}{c} x \\ x_I \end{array}\right] + \underbrace{ \left[\begin{array}{c} 0 \\ 0 \end{array}\right] }_{D_{21}} r \end{array}\right.}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-34bf0da930252e74bd42cb1640969702_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(10a)\quad K_0: \left\{\begin{array}{l} \dot{x}_K=A_K(U,U^2)x_K+ \underbrace{ \left[\begin{array}{cc} B_K^{(1)}(U,U^2) & B_K^{(2)}(U,U^2) \end{array}\right] }_{B_K(U,U^2)} \left[\begin{array}{c} y \\ x_I \end{array}\right] \\ u=C_K(U,U^2)x_K + \underbrace{ \left[\begin{array}{cc} D_K^{(1)}(U,U^2) & D_K^{(2)}(U,U^2) \end{array}\right] }_{D_K(U,U^2)} \left[\begin{array}{c} y \\ x_I \end{array}\right] \end{array}\right.}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a9bc3ecd695bd182e8c63d29351d1924_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(11)\quad K: \left\{\begin{array}{l} \left[\begin{array}{c} \dot{x}_K \\ \dot{x}_I \end{array}\right]= \underbrace{ \left[\begin{array}{cc} A_K(U,U^2) & B_K^{(2)}(U,U^2) \\ 0 & 0 \end{array}\right] }_{A_K(U,U^2)} \left[\begin{array}{c} x_K \\ x_I \end{array}\right]\\ + \underbrace{ \left[\begin{array}{cc} B_K^{(1)}(U,U^2) & 0\\ -1& 1 \end{array}\right] }_{B_K(U,U^2)} \left[\begin{array}{c} y \\ r \end{array}\right] \\ u= \underbrace{ \left[\begin{array}{cc} C_K(U,U^2) & D_K^{(2)}(U,U^2) \end{array}\right] }_{C_K(U,U^2)} \left[\begin{array}{c} x_K \\ x_I \end{array}\right]\\ + \underbrace{ \left[\begin{array}{cc} D_K^{(1)}(U,U^2) & 0 \end{array}\right] }_{D_K(U,U^2)} \left[\begin{array}{c} y \\ r \end{array}\right] \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b11949446b4d75aac55c83f1105e175c_l3.png "Rendered by QuickLaTeX.com")
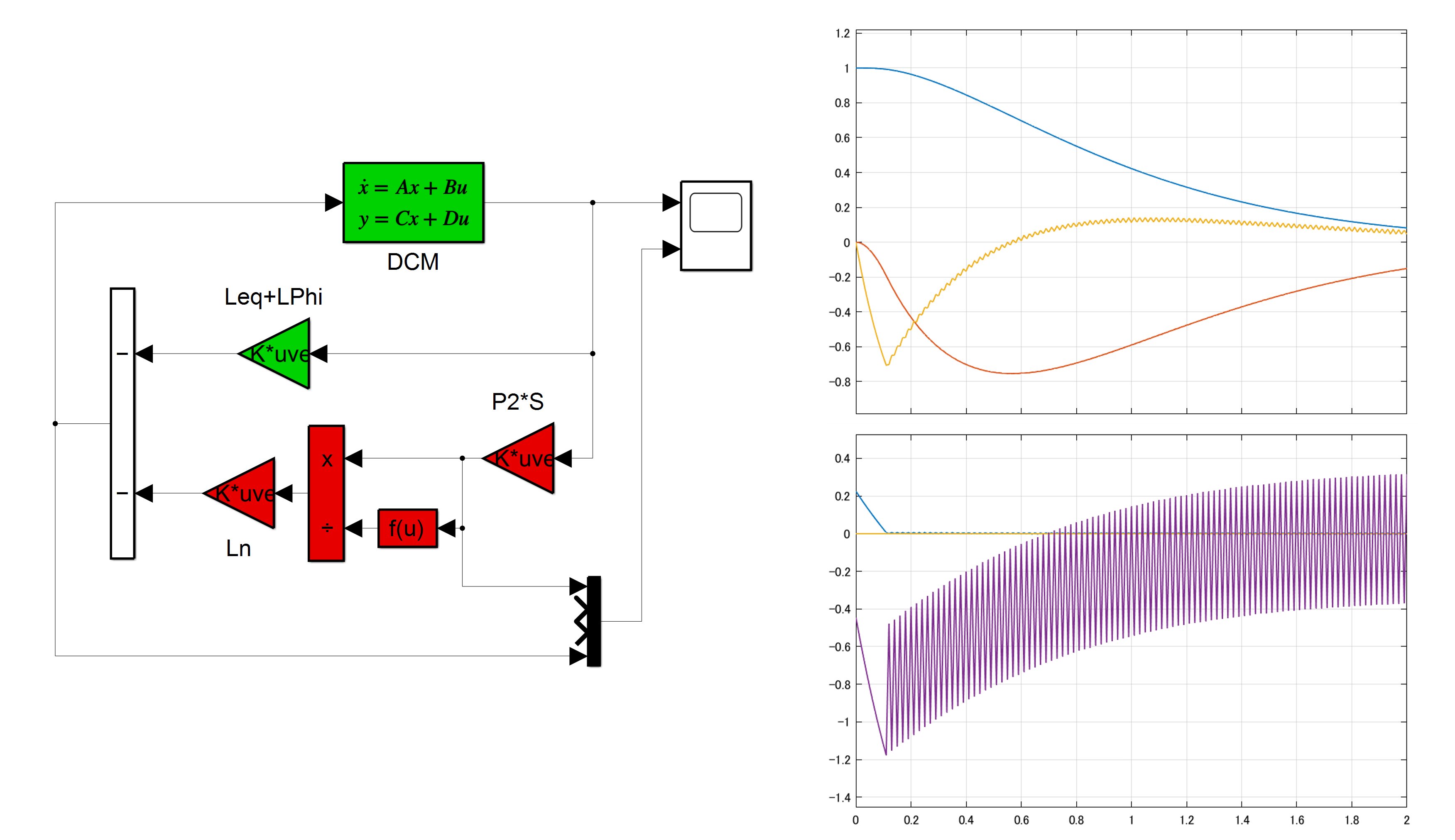
 として設計した
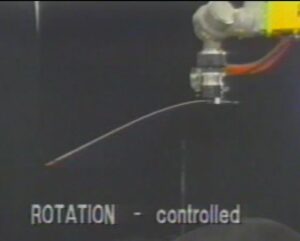
として設計した 制御による閉ループ系のシミュレーションを次に示します。3種類の速度変動に応じてばらつきか見られます。
制御による閉ループ系のシミュレーションを次に示します。3種類の速度変動に応じてばらつきか見られます。



