予備的考察
BackSteppingの邦訳は、読み方のバックステッピング以外には適切なものがないようですが、非線形系に対する一つの制御方式を表しています。そこで、以下ではBackSteppingをBS制御と呼ぶことにします。
BS制御の基本的なアイデアを、次の例を用いて説明します。

ここで、(1.1)が非線形動作を、(1.2)がアクチュエータ動作を、(1.3)が観測式を表しています。したがって、制御対象は状態変数 をもつ2次元の非線形系です。
をもつ2次元の非線形系です。
制御目的は状態変数 を速やかに零(平衡状態)に戻すこととします。
を速やかに零(平衡状態)に戻すこととします。
状態変数はの2つなので、BS制御系設計のために2回の変数変換を行います。

以下では、変数変換後の状態変数 について2次安定性(したがって漸近安定性)を示し、逆変換により、元の状態変数についての漸近安定性を示します。
について2次安定性(したがって漸近安定性)を示し、逆変換により、元の状態変数についての漸近安定性を示します。
●Step 1
まず第1番目の変数変換として、次を考えます。

また に対する仮想的な操作変数
に対する仮想的な操作変数 を導入して、第2番目の変数変換
を導入して、第2番目の変数変換

を考えます。このとき(1.1)は次式で表されます。

このフィードバック線形化を行うために

と定義すると、 の状態方程式として
の状態方程式として

を得ます。これに対するリャプノフ関数

に対して、次式を得ます。

●Step 2
 の状態方程式として、(1.2)を用いて
の状態方程式として、(1.2)を用いて

を得ます。これに対するリャプノフ関数を

と定義すると、次式を得ます。

ここで、操作入力を

と選ぶと次式を得ます。

●以上の変数変換とその逆変換は、次式のように表すことができます。


変数変換後の閉ループ系は次式で表されます。

すなわち
![\displaystyle{(15)\quad \underbrace{ \left[\begin{array}{l} \dot{z}_1\\ \dot{z}_2 \end{array}\right]}_{\dot z}=- \underbrace{ \left[\begin{array}{cc} k_1 & 0\\ 0 & k_2 \end{array}\right]}_{K} \underbrace{ \left[\begin{array}{l} z_1\\ z_2 \end{array}\right]}_{z}+ \underbrace{ \left[\begin{array}{cc} 0 & 1\\ -1 & 0 \end{array}\right]}_{S} \underbrace{ \left[\begin{array}{l} z_1\\ z_2 \end{array}\right]}_{z} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5ba0b9891c7ccb17dde0e6f7efa61211_l3.png "Rendered by QuickLaTeX.com")
このとき、2次安定性

が示されており

が成り立ち、(13)から制御目的が達成されていることが分かります。
●フィードバック線形化(5)の実施においては、非線形関数 を正確にモデリングしておく必要がありますが、実際にはこれは一般には困難です。たとえば次の例を考えます。
を正確にモデリングしておく必要がありますが、実際にはこれは一般には困難です。たとえば次の例を考えます。

ここで、 は未知とします。第1項と第3項は線形の減衰項とみなせますが、第2項は非線形の減衰力で打ち消す必要があります。たとえば、
は未知とします。第1項と第3項は線形の減衰項とみなせますが、第2項は非線形の減衰力で打ち消す必要があります。たとえば、 に注意して
に注意して

と選ぶとき、次式が成り立ちます。

このとき、(6)の下で、次式を得ます。

また、(9)の下で

ここで、(11)のように と選択すると
と選択すると

ここで、恒等式

において、 とおけば、次式を得ます。
とおけば、次式を得ます。

したがって、 と選べば、
と選べば、 を達成できます。すなわち、制御則(19)と(11)は、未知のを使わないので、BS制御はロバストであると言えます。
を達成できます。すなわち、制御則(19)と(11)は、未知のを使わないので、BS制御はロバストであると言えます。
Mass-Damper-Spring System
次のMDS(マス・ダンパ・バネ)系を考えます。

ここで、 は位置を、
は位置を、 は速度を、
は速度を、 は質量を、
は質量を、 は非線形の減衰係数を、
は非線形の減衰係数を、 は非線形のバネ係数を表しています。(1.1)と(1.2)が状態変数
は非線形のバネ係数を表しています。(1.1)と(1.2)が状態変数 をもつ非線形状態方程式、(1.3)が観測方程式です。
をもつ非線形状態方程式、(1.3)が観測方程式です。
制御目的は、目標軌道 に対する追従誤差
に対する追従誤差

を速やかに零とし目標軌道に乗せることです。基礎式は次のようにまとめられます。

ここで、第1式が非線形動作を、第2式が追従誤差の振舞い(積分動作とは異なる)を表しています。
状態変数は 、
、 の2つなので、BS制御系設計のために2回の変数変換を行います。
の2つなので、BS制御系設計のために2回の変数変換を行います。

以下では、変数変換後の状態変数について2次安定性(したがって漸近安定性)を示し、逆変換により、元の状態変数についての漸近安定性を示します。
●Step 1
まず第1番目の変数変換として、次式を考えます。

に対する仮想的な操作変数を導入して、第2番目の変数変換

を考えます。このときの状態方程式

を得ます。このフィードバック線形化を行うために

と定義すると、次式を得ます。

これに対するリャプノフ関数

に対して、次式を得ます。

●Step 2
の状態方程式として、(5)から

(3)を用いて次式を得ます。

これに対するリャプノフ関数を

と定義すると、次式を得ます。

ここで、操作入力を

と選ぶと次式を得ます。

●以上の変数変換とその逆変換は、次式のように表すことができます。


変数変換後の閉ループ系は次式で表されます。

すなわち
![\displaystyle{(18)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{cc} 1 & 0\\ 0 & m \end{array}\right]}_{M} \underbrace{ \left[\begin{array}{l} \dot{z}_1\\ \dot{z}_2 \end{array}\right]}_{\dot z}=- \underbrace{ \left[\begin{array}{cc} k_1+n_1(z_1) & 0\\ 0 & k_2+n_2(z_2) \end{array}\right]}_{K} \underbrace{ \left[\begin{array}{l} z_1\\ z_2 \end{array}\right]}_{z}\\ + \underbrace{ \left[\begin{array}{cc} 0 & 1\\ -1 & 0 \end{array}\right]}_{S} \underbrace{ \left[\begin{array}{l} z_1\\ z_2 \end{array}\right]}_{z} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7e30d4583990442c75248537bb56d2b1_l3.png "Rendered by QuickLaTeX.com")
このとき、2次安定性

が示されており

が成り立ち、制御目的が達成されていることが分かります。
●平衡状態の安定化問題は、次のように目標軌道が一定の特別な場合と考えられます。

簡単のため、 、とすると
、とすると

となり、次式を得ます。

これは、次のような非線形のPD制御とみなすことができます。

実際、(4)より 、
、 、(5)より
、(5)より に注意して
に注意して

以下では積分動作を導入するための2つのアプローチを示します。
Integrator Augmentation
外乱の影響を受ける次のMDS(マス・ダンパ・バネ)系を考えます。

ここで、 は外乱を表しています。
は外乱を表しています。
制御目的は、外乱に抗して、目標軌道に対する追従誤差
を速やかに零とし目標軌道に乗せることです。
積分動作を入れて状態方程式を拡大した基礎式は次のようにまとめられます。

ここで、第1式が非線形動作を、第2式が追従誤差の振舞いを、第3式が積分動作を表しています。
状態変数は 、
、 、
、 の3つなので、BS制御系設計のために3回の変数変換を行います。
の3つなので、BS制御系設計のために3回の変数変換を行います。

以下では、変数変換後の状態変数 について2次安定性(したがって漸近安定性)を示し、逆変換により、元の状態変数
について2次安定性(したがって漸近安定性)を示し、逆変換により、元の状態変数 についての漸近安定性を示します。
についての漸近安定性を示します。
●Step 1
まず第1番目の変数変換として、次式を考えます。

 に対する仮想的な操作変数を導入して、第2番目の変数変換
に対する仮想的な操作変数を導入して、第2番目の変数変換

を考えます。このときの状態方程式

を得ます。いま

と定義すると

これに対するリャプノフ関数
に対して、次式を得ます。

●Step 2
の状態方程式として、(5)から

に対する仮想的な操作変数 を導入して、第3番目の変数変換
を導入して、第3番目の変数変換

を考えます。このときの状態方程式

を得ます。これに対するリャプノフ関数を
と定義すると、次式を得ます。

ここで

と定義すると、次式を得ます。

これから、次式を得ます。

●Step 3
 の状態方程式として、(11)から
の状態方程式として、(11)から

を得ます。このとき

これに対するリャプノフ関数

に対して、次式を得ます。

ここで、操作入力を

と選ぶと、次式を得ます。

●以上の変数変換とその逆変換は、次式のように表すことができます。


閉ループ系は次式で表されます。

すなわち
![\displaystyle{(21)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{ccc} 1 & 0 & 0\\ 0 & 1 & 0\\ 0 & 0 & m \end{array}\right]}_{M} \underbrace{ \left[\begin{array}{l} \dot{z}_1\\ \dot{z}_2\\ \dot{z}_3 \end{array}\right]}_{\dot z}=- \underbrace{ \left[\begin{array}{ccc} k_1 & 0 & 0\\ 0 & k_2 & 0\\ 0 & 0 & d(v)+k_3 \end{array}\right]}_{K} \underbrace{ \left[\begin{array}{l} z_1\\ z_2\\ z_3 \end{array}\right]}_{z}\\+ \underbrace{ \left[\begin{array}{ccc} 0 & 1 & 0\\ -1 & 0 & 1\\ 0 & -1 & 0 \end{array}\right]}_{S} \underbrace{ \left[\begin{array}{l} z_1\\ z_2\\ z_3 \end{array}\right]}_{z} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e4c27a02e87a8a58ef7fe31f40061a45_l3.png "Rendered by QuickLaTeX.com")
このとき、2次安定性

が示されており

が成り立ち、制御目的が達成されていることが分かります。
Integral Action by Constant Parameter Adaptation
次の定値外乱の影響を受けるMDS(マス・ダンパ・バネ)系を考えます。

ここで、は位置を、は速度を、は定値外乱を、は質量を、は非線形の減衰係数を、は非線形のバネ係数を表しています。
制御目的は、定値外乱に抗して、目標軌道に対する追従誤差
を速やかに零とし目標軌道に乗せることです。基礎式は次のようにまとめられます。

ここで、第1式が定値外乱下の非線形動作を、第2式が追従誤差の振舞いを表しています。
●Step 1
まず第1番目の変数変換として、次式を考えます。

に対する仮想的な操作変数を導入して、第2番目の変数変換
を考えます。このときの状態方程式

を得ます。このフィードバック線形化を行うために

と定義すると、次式を得ます。
これに対するリャプノフ関数

に対して、次式を得ます。

●Step 2
の状態方程式として、(5)と(7)から

よって、(3)から次式を得ます。

これに対するリャプノフ関数を
と定義すると、次式を得ます。

ここで、操作入力を

と選ぶと次式を得ます。

ここで、外乱の予測式を

と選べばよいことが分かります。
●閉ループ系は次式で表されます。

すなわち
![\displaystyle{(17)\quad \underbrace{ \left[\begin{array}{cc} 1 & 0\\ 0 & m \end{array}\right]}_{M} \underbrace{ \left[\begin{array}{l} \dot{z}_1\\ \dot{z}_2 \end{array}\right]}_{\dot z}=- \underbrace{ \left[\begin{array}{cc} k_1 & 1\\ -1 & -k_2-d(v) \end{array}\right]}_{A} \underbrace{ \left[\begin{array}{l} z_1\\ z_2 \end{array}\right]}_{z}+ \underbrace{ \left[\begin{array}{c} 0 \\ -1 \end{array}\right]}_{b} (\hat{w}-w) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-da7a835f971ce5dac2d1a21c12164a35_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(18)\quad \dot{\hat{w}}=-p \underbrace{ \left[\begin{array}{cc} 0 & -1 \end{array}\right]}_{b^T} \underbrace{ \left[\begin{array}{l} z_1\\ z_2 \end{array}\right]}_{z} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c15da6d97348e4f96dbe7ef9aee6bada_l3.png "Rendered by QuickLaTeX.com")


 、復元係数
、復元係数 は、
は、 、
、 の非線形関数、
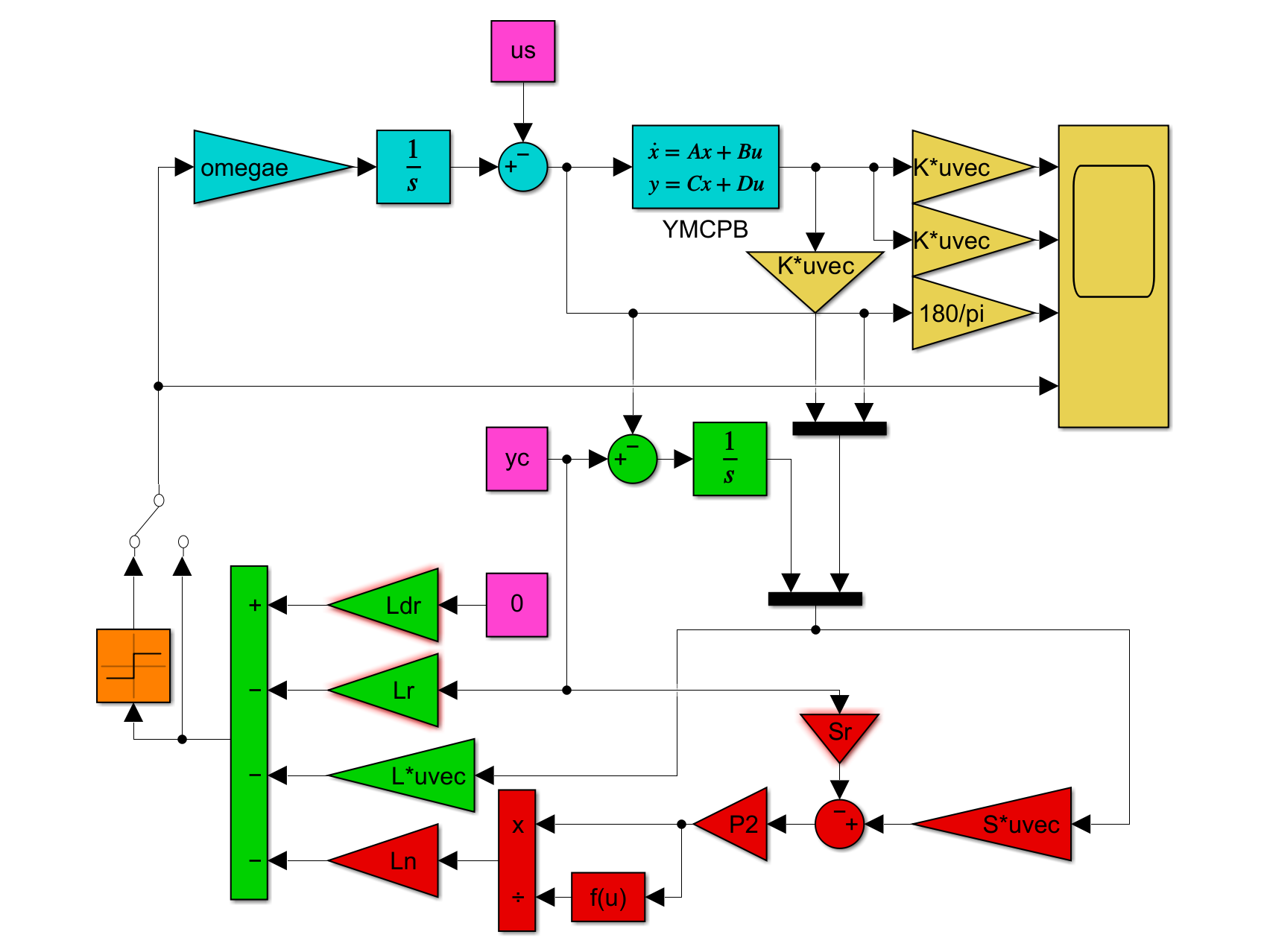
の非線形関数、 は船外機の取付角で、その動作は操作変数
は船外機の取付角で、その動作は操作変数 を用いて、次式で表されます。
を用いて、次式で表されます。
![\displaystyle{(4)\quad \begin{array}{l} \underbrace{ \frac{d}{dt} \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{ccc} 0 & 1 & 0\\ a_{63} & a_{66} & b_{62}\\ 0 & 0 & 0 \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{cc} 0 \\ 0 \\ \Omega_e \end{array}\right] }_{B} u_e(t)\\ +\underbrace{ \left[\begin{array}{cccc} 0 & 0 & 0 & 0 \\ a_{62} & a_{64} & a_{65} & b_{61}\\ 0 & 0 & 0 & 0 \end{array}\right] \left[\begin{array}{c} z(t)-z^*\\ \dot{x}(t)-V^*\\ \dot{z}(t)\\ T(t)-T^* \end{array}\right] }_{w(t)} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-44d46ce48189bf941958132e5f951657_l3.png "Rendered by QuickLaTeX.com")
 は平衡状態を表しています。
は平衡状態を表しています。
 に移動させること、その上で外乱に抗して船体のピッチ角の振動を抑え、平衡状態を保持することです。そのために、制御則には誤差
に移動させること、その上で外乱に抗して船体のピッチ角の振動を抑え、平衡状態を保持することです。そのために、制御則には誤差


 とします。
とします。 、
、 、
、 、
、 の4つなので、BS制御系設計のために4回の変数変換を行います。
の4つなので、BS制御系設計のために4回の変数変換を行います。
 について2次安定性(したがって漸近安定性)を示し、逆変換により、元の状態変数
について2次安定性(したがって漸近安定性)を示し、逆変換により、元の状態変数 についての漸近安定性を示します。
についての漸近安定性を示します。
 に対する仮想的な操作変数
に対する仮想的な操作変数
















 に対して仮想的な操作変数
に対して仮想的な操作変数 を導入して、第4番目の変数変換
を導入して、第4番目の変数変換
 の状態方程式は
の状態方程式は






![\displaystyle{(1)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} \dot x_1(t)\\ \dot x_2(t) \end{array}\right] }_{\dot{x}_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} A & B \\ 0 & 0 \end{array}\right] }_{A_{E3}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)} + \underbrace{ \left[\begin{array}{c} 0\\ I_m \end{array}\right] }_{B_{E3}} {\dot u}(t)\\ (x_1(t)=x(t)-x_\infty, x_2(t)=u(t)-u_\infty) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-287cdcd8e65d74ee36ec3b14429778da_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(2)\quad s(t)= \underbrace{ \left[\begin{array}{cc} S_1 & S_2 \\ \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)} = \underbrace{S_2 \left[\begin{array}{cc} M & I \\ \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)} \ (M=S_2^{-1}S_1) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b29dc4a454912e8d6acde0686487f72b_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(3)\quad \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{x'_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} I & 0 \\ S_1 & S_2 \\ \end{array}\right] }_{T_s} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)}\\ \Leftrightarrow \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} I & 0 \\ -S_2^{-1}S_1 & S_2^{-1} \\ \end{array}\right] }_{T_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{x'_{E3}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1d43b39400a0f9614aa7f3662f3f8fc4_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(4)\quad \underbrace{ \left[\begin{array}{c} \dot x_1(t)\\ \dot s(t) \end{array}\right] }_{\dot{x}'_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} \bar{A}_{11} & \bar{A}_{12} \\ \bar{A}_{21} & \bar{A}_{22} \\ \end{array}\right] }_{T_sA_{E3}T_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{x'_{E3}(t)} + \underbrace{ \left[\begin{array}{cc} 0\\ S_2 \end{array}\right] }_{T_sB_{E3}} {\dot u}(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ad4d0f30544fe9138bf4a06f0bbc0d3c_l3.png "Rendered by QuickLaTeX.com")

 が安定行列となるようにスイッチング関数が選ばれていると仮定します。
が安定行列となるようにスイッチング関数が選ばれていると仮定します。
![\displaystyle{(7)\quad {\dot u}_\ell(t)=-\underbrace{(SB_{E3})^{-1}(SA_{E3}-\Phi S)}_{K_{E3}=\left[\begin{array}{cc} K_1 & K_2 \end{array}\right]}}x_{E3}(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-aa75a3fae556ffb1e063a6c3165e9f14_l3.png "Rendered by QuickLaTeX.com")

 は安定行列、
は安定行列、 は
は の解です。
の解です。
![\displaystyle{(10)\quad {\dot u}_\ell(t)=- \boxed{\underbrace{ (SB_{E3})^{-1}(SA_{E3}-\Phi S)S_E^{-1} }_{\left[\begin{array}{cc} F & F_I \end{array}\right]}} \underbrace{ \left[\begin{array}{c} {\dot x}(t) \\ y(t)-r \end{array}\right] }_{x_{E2}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-17dcffd80184d45c409aa1d4e2fd454e_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(12)\quad {\dot u}_n(t) =-(SB_{E3})^{-1}\rho\, {\rm sgn}( \boxed{\underbrace{ P_2SS_E^{-1} }_{\left[\begin{array}{cc} G & G_I \end{array}\right]}} \underbrace{ \left[\begin{array}{c} {\dot x}(t) \\ y(t)-r \end{array}\right] }_{x_{E2}(t)}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-863369c4b058cffb357ac9501fed0507_l3.png "Rendered by QuickLaTeX.com")

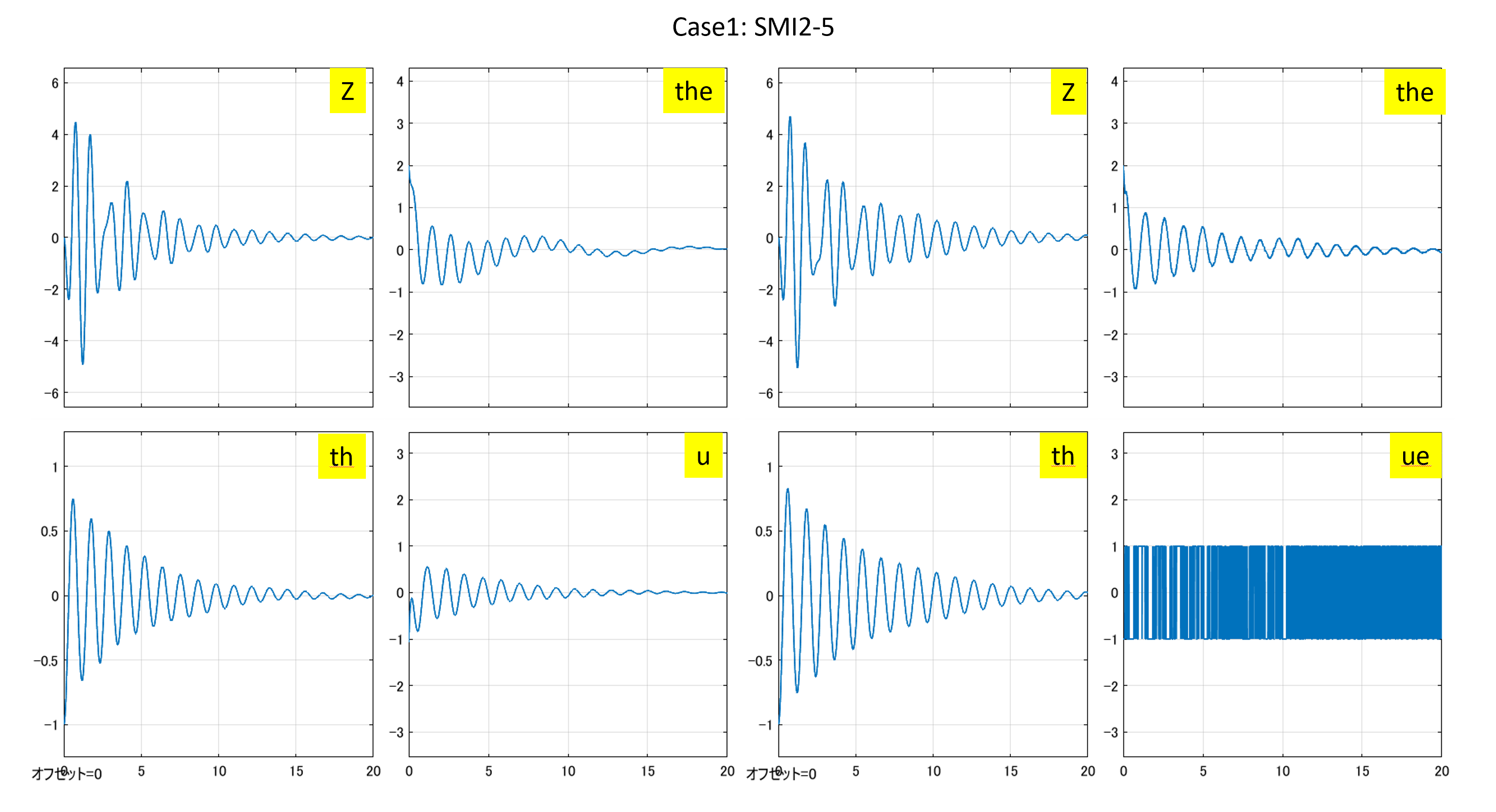
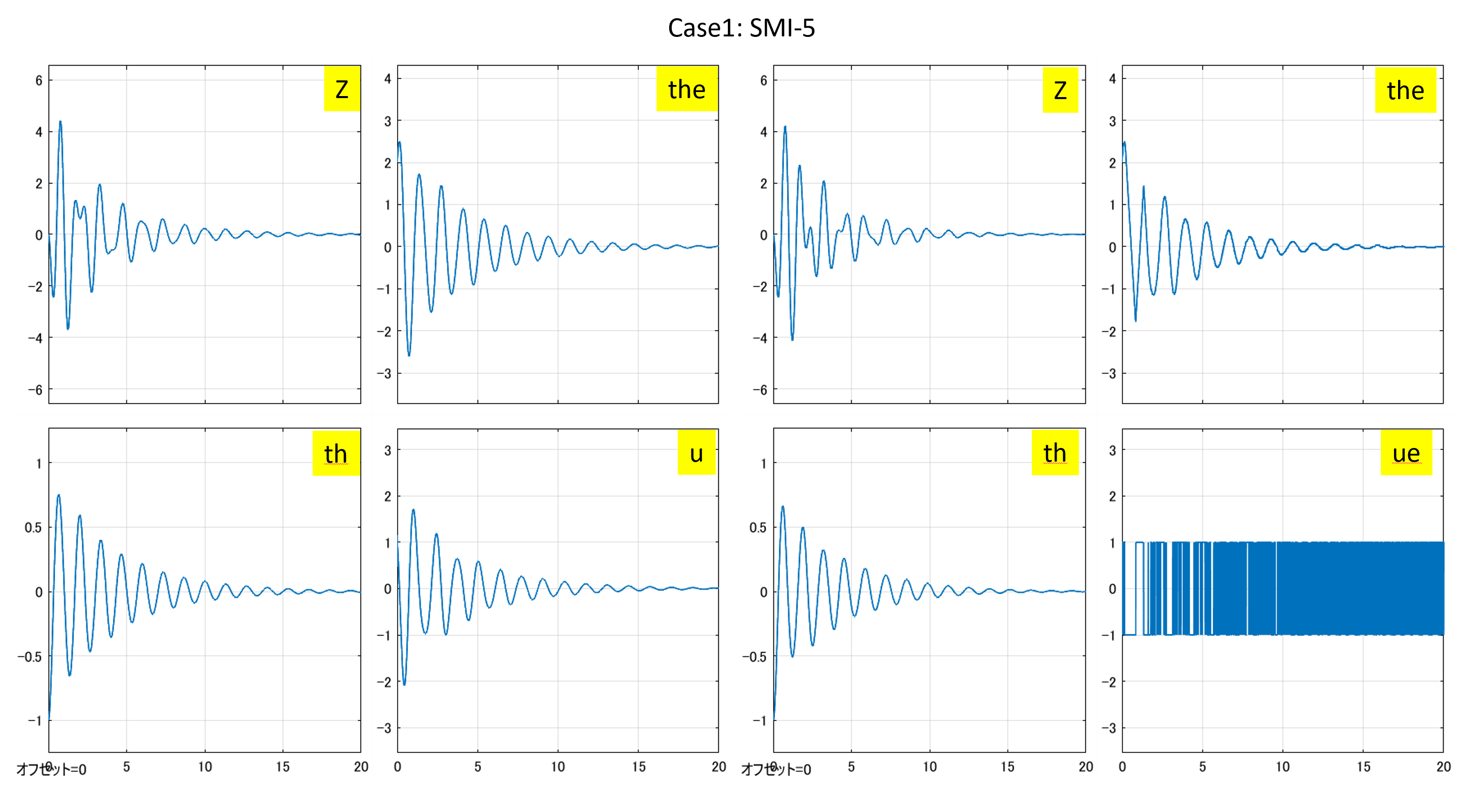
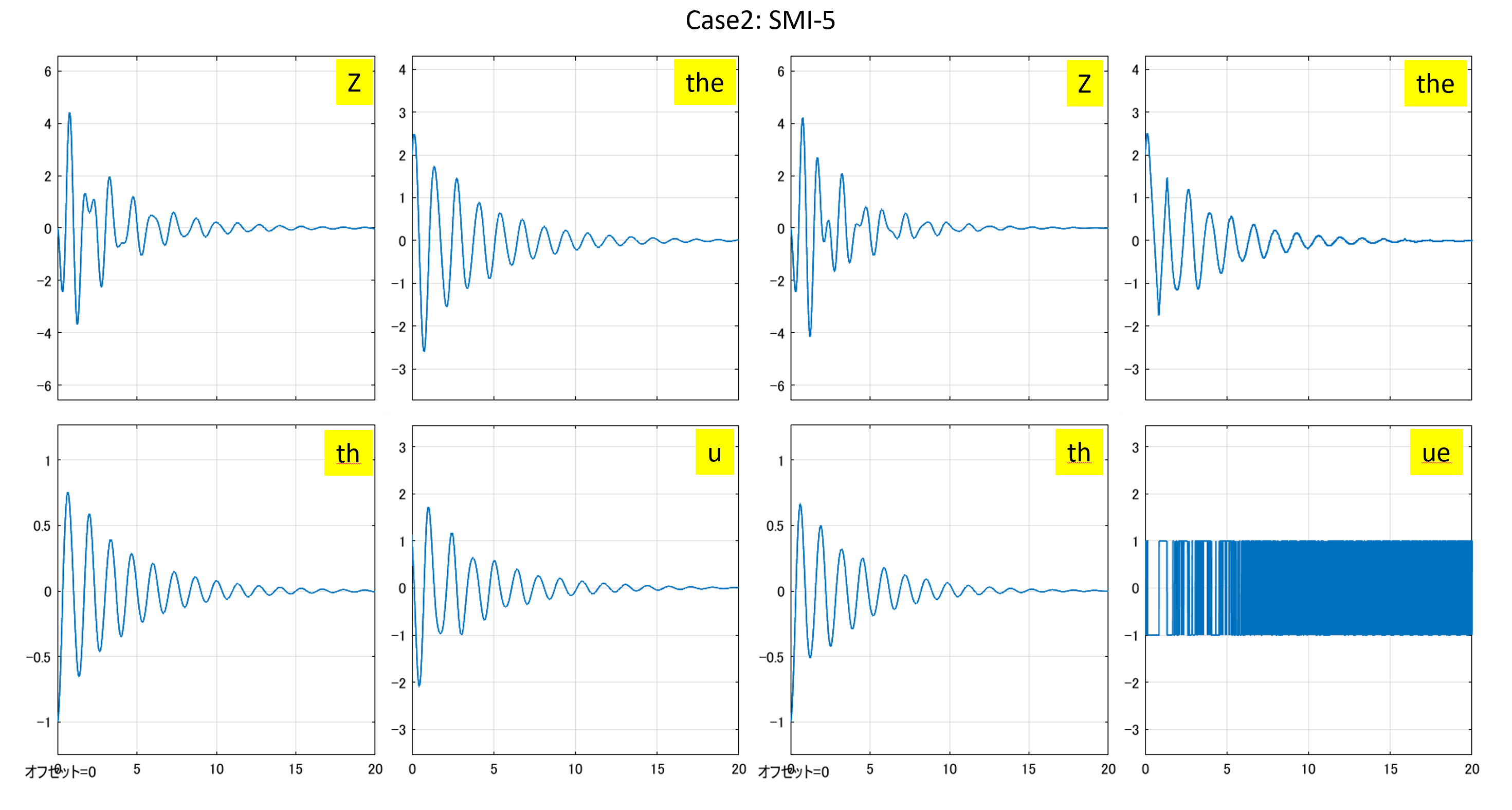
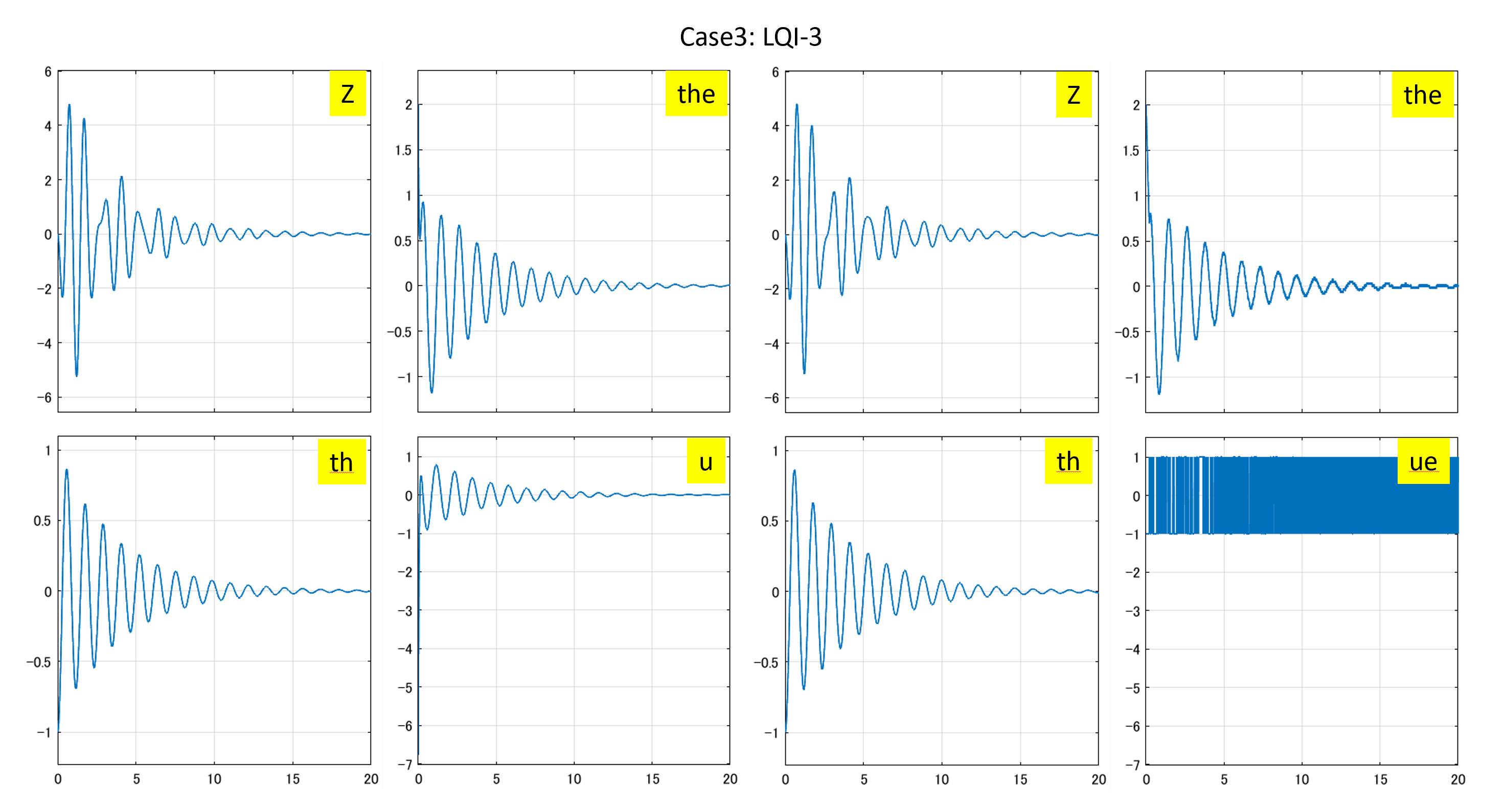
 ⇒Case2:いくつかの動作点で不安定
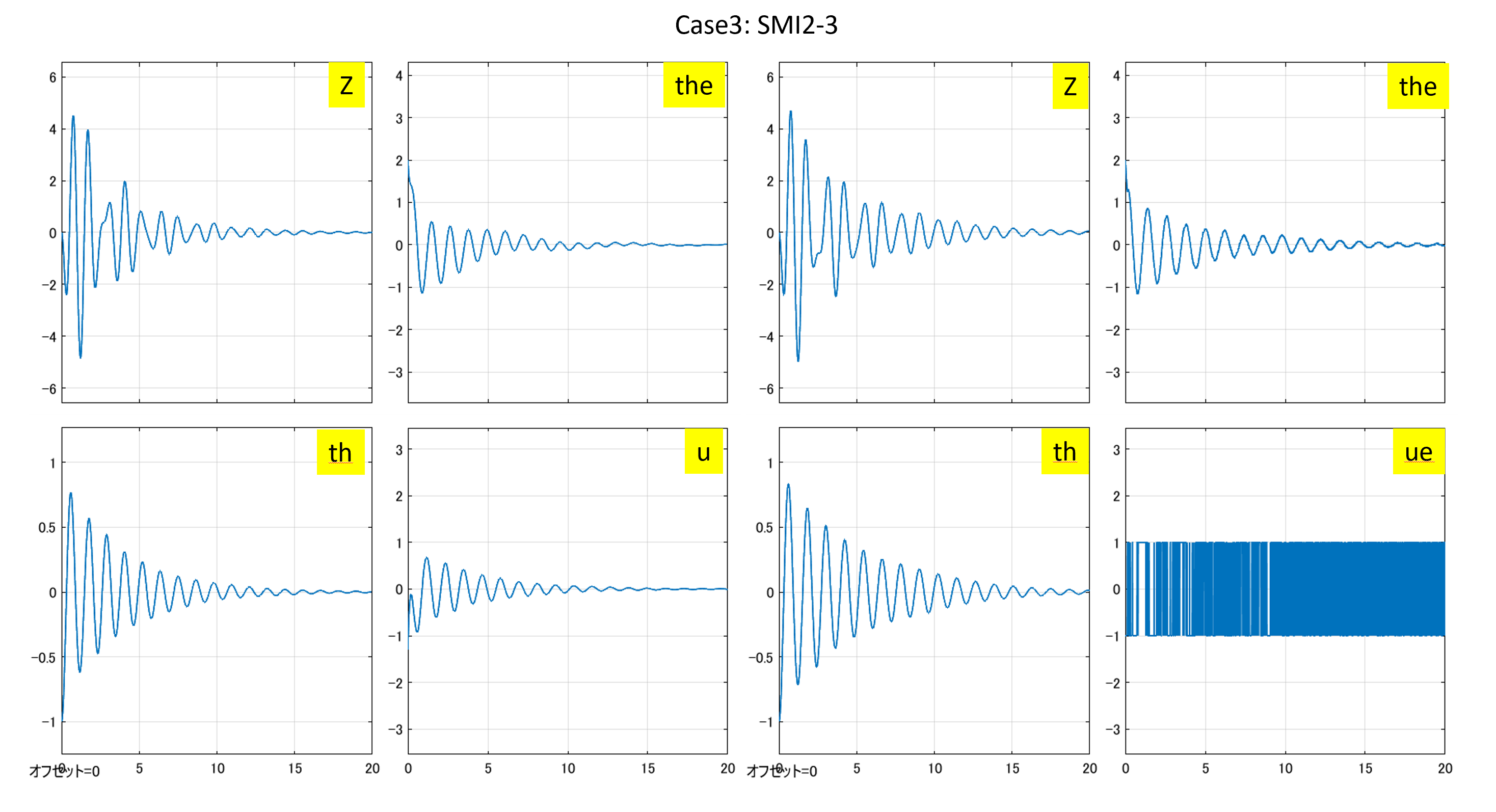
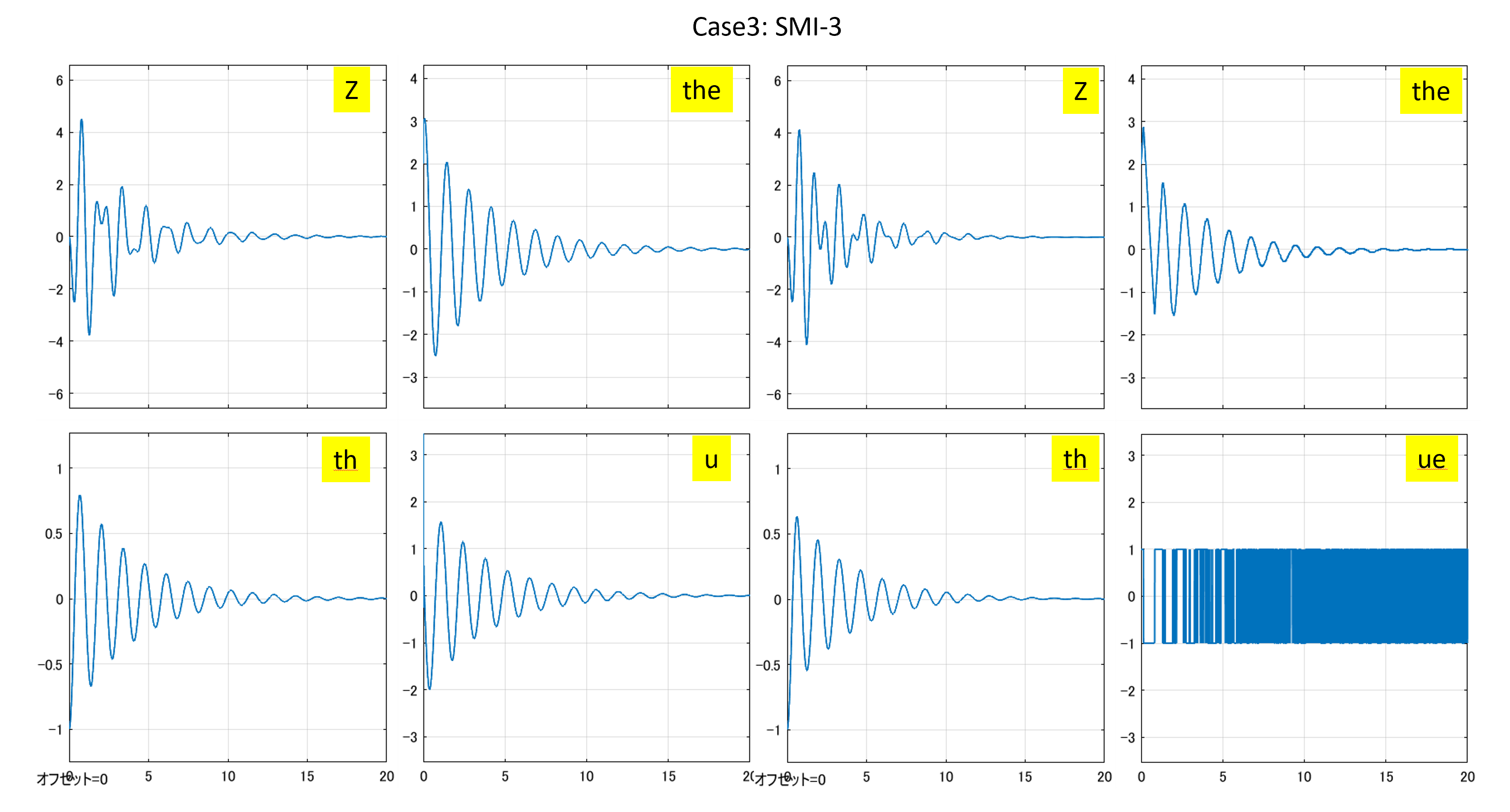
⇒Case2:いくつかの動作点で不安定 ⇒Case3:すべて安定
⇒Case3:すべて安定 ⇒Case2:いくつかの動作点で不安定
⇒Case2:いくつかの動作点で不安定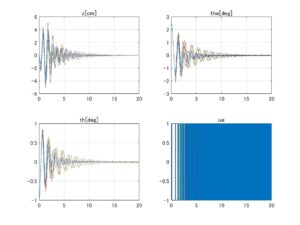 ⇒Case3:すべて安定
⇒Case3:すべて安定 ⇒Case2:いくつかの動作点で不安定
⇒Case2:いくつかの動作点で不安定 ⇒Case3:すべて安定
⇒Case3:すべて安定 の係数を強制的に
の係数を強制的に としていることです。これは
としていることです。これは となる場合があって、
となる場合があって、

 は安定行列)。そのために、積分動作
は安定行列)。そのために、積分動作
![\displaystyle{(4)\quad \begin{array}{l} \left[\begin{array}{c} \dot x_r(t)\\ \dot x(t) \end{array}\right] = \left[\begin{array}{c|cc} 0 & -C_1 & -C_2\\\hline 0 & A_{11} & A_{12} \\ 0 & A_{21} & A_{22} \end{array}\right] \left[\begin{array}{c} x_r(t)\\ x(t) \end{array}\right] + \left[\begin{array}{c} 0\\\hline 0\\ B_2 \end{array}\right] u(t) + \left[\begin{array}{c} I_m \\\hline 0 \\ 0 \end{array}\right] r(t)\\ (x_r(t)\in{\rm\bf R}^m, x(t)\in{\rm\bf R}^n) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1ab4b378422eddd1bff475a2408082e2_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(5a)\quad \begin{array}{l} \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{x}_2(t) \end{array}\right] = \underbrace{ \left[\begin{array}{cc|c} 0 & -C_1 & -C_2\\ 0 & A_{11} & A_{12} \\\hline 0 & A_{21} & A_{22} \end{array}\right] }_{A_E} \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] + \underbrace{ \left[\begin{array}{c} 0\\ 0\\\hline B_2 \end{array}\right] }_{B_E} u(t) + \left[\begin{array}{c} I_m \\ 0 \\\hline 0 \end{array}\right] r(t)\\ (x_1(t)\in{\rm\bf R}^n, x_2(t)\in{\rm\bf R}^m) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-374491b693fbc08a0a4648abd3e610d2_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(5b)\quad %\begin{array}{l} \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] = \left[\begin{array}{c} x_r(t)\\ x(t) \end{array}\right] %\end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a936cb7479b75e7930c3bcfc0589d4fc_l3.png "Rendered by QuickLaTeX.com")
 は定値となり、被積分項
は定値となり、被積分項 の値は零となり、
の値は零となり、 は
は へ漸近します。そこで、SM制御によって拡大系を安定化し、追従制御系を構成することを考えます。この制御系は特別な
へ漸近します。そこで、SM制御によって拡大系を安定化し、追従制御系を構成することを考えます。この制御系は特別な の場合を含みますので、まずスイッチング関数として、次式を考えます。
の場合を含みますので、まずスイッチング関数として、次式を考えます。![\displaystyle{(6)\quad s(t)= \underbrace{ \left[\begin{array}{cc} S_1 & S_2 \\ \end{array}\right] }_{S} %\underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] %}_{x(t)} = \underbrace{S_2 \left[\begin{array}{cc} M & I_m \\ \end{array}\right] }_{S} %\underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] %}_{x(t)} \ (M=S_2^{-1}S_1) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-01bb686061b94fbab2a0ff90e7d23f64_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(7)\quad \begin{array}{l} \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] = \underbrace{ \left[\begin{array}{cc} I_n & 0 \\ S_1 & S_2 \\ \end{array}\right] }_{T_s} \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right]\\ \Leftrightarrow \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] = \underbrace{ \left[\begin{array}{cc} I_n & 0 \\ -S_2^{-1}S_1 & S_2^{-1} \\ \end{array}\right] }_{T_s^{-1}} \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-19e5643bcb296d8a517aba35bc4fe14e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(8a)\quad \begin{array}{l} %\underbrace{ \left[\begin{array}{c} \dot x_1(t)\\ \dot s(t) \end{array}\right] %}_{\dot{x}'(t)} = \underbrace{ \left[\begin{array}{cc} \bar{A}_{11} & \bar{A}_{12} \\ S_2\bar{A}_{21} & S_2\bar{A}_{22}S_2^{-1} \\ \end{array}\right] }_{T_sA_ET_s^{-1}} %\underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] %}_{x'(t)} + \underbrace{ \left[\begin{array}{cc} 0\\ S_2B_2 \end{array}\right] }_{T_sB_E} u(t)\\ + \left[\begin{array}{cc} B_r \\ S_1B_r \end{array}\right] r(t) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a23595fe93cd3fb99284c6e90f61bcf1_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(8b)\quad \left\{\begin{array}{l} \bar{A}_{11}= \left[\begin{array}{cc} 0 & -C_1 \\ 0 & A_{11} \end{array}\right] -\left[\begin{array}{c} -C_2\\ A_{12} \end{array}\right]M\\ \bar{A}_{12}= \left[\begin{array}{c} -C_2\\ A_{12} \end{array}\right]S_2^{-1}\\ \bar{A}_{21}=S_2(M\bar{A}_{11} + \left[\begin{array}{cc} 0 & A_{21} \end{array}\right] -A_{22}M)\\ \bar{A}_{22}=S_2(M \left[\begin{array}{c} -C_2\\ A_{12} \end{array}\right] +A_{22})S_2^{-1}\\ B_r=\left[\begin{array}{cc} I_m \\ 0 \end{array}\right] \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-24d62178408415d07b9cef2c8d0cfab3_l3.png "Rendered by QuickLaTeX.com")
 が選ばれているとします。
が選ばれているとします。![\displaystyle{(9)\quad { \boxed{\begin{array}{l} u(t)=u_\ell(t)+u_n(t)\\ u_\ell(t)=-\underbrace{(SB_E)^{-1}(SA_E-\Phi S)}_{L=L_{eq}+L_\Phi}\left[\begin{array}{c} x_r(t)\\ x(t) \end{array}\right]\\ -\underbrace{(SB_E)^{-1}(\Phi S_r+S_1B_r)}_{L_r} r(t) +\underbrace{(SB_E)^{-1}S_r}_{L_{\dot r}} \dot{r}(t)\\ u_n(t)=-\underbrace{(SB_E)^{-1}\rho(t,x)}_{L_n}\frac{P_2(s(t)-S_rr(t))}{||P_2(s(t)-S_rr(t))||} \end{array}}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c4cbe9f1729638135b91b41ee797a570_l3.png "Rendered by QuickLaTeX.com")
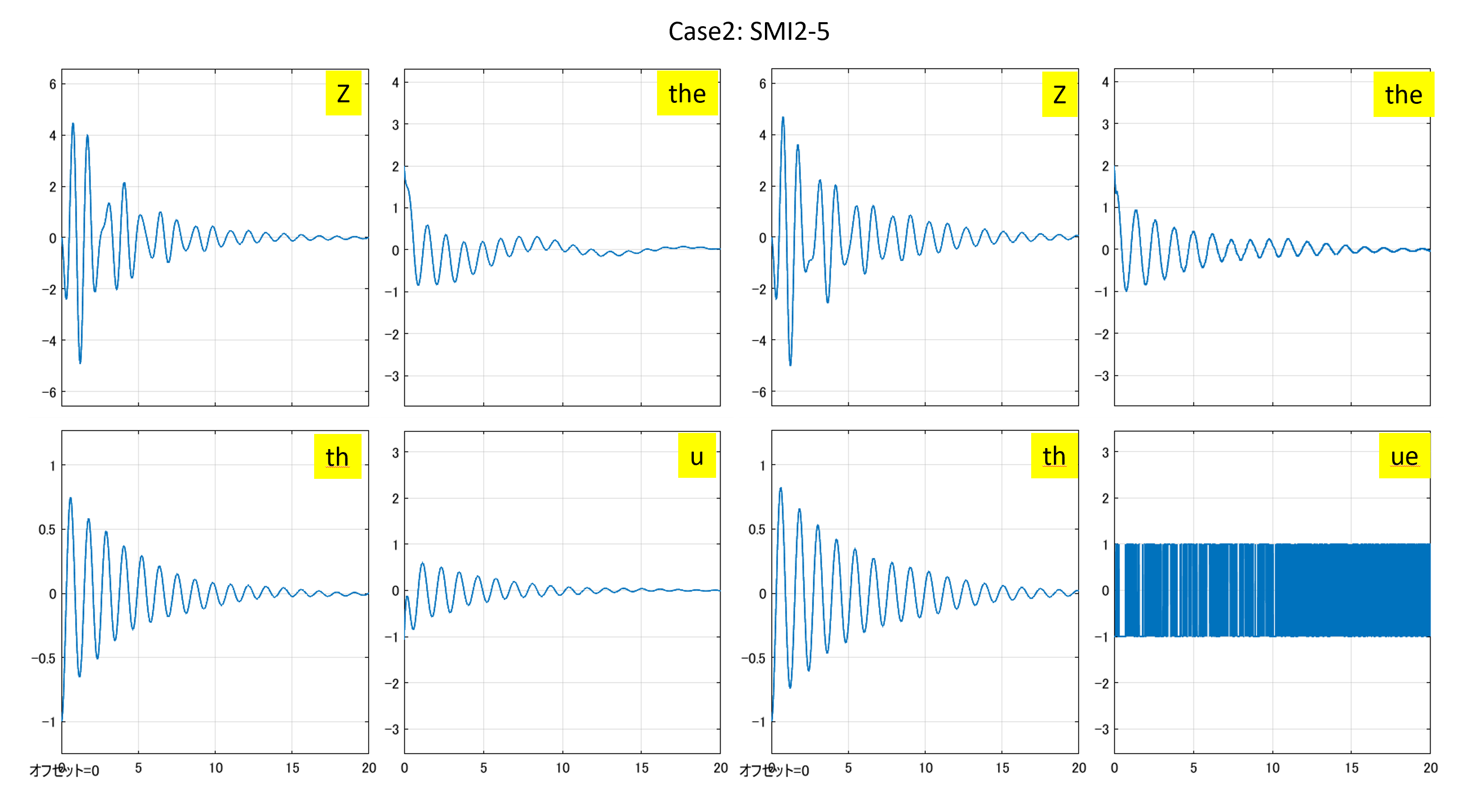
 ⇒Case2:いくつかの動作点で不安定
⇒Case2:いくつかの動作点で不安定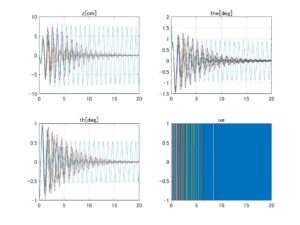 ⇒Case3:いくつかの動作点で不安定
⇒Case3:いくつかの動作点で不安定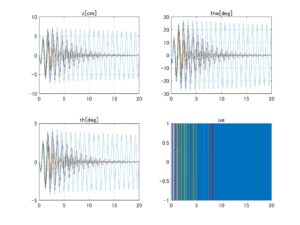 ⇒Case2:いくつかの動作点で不安定
⇒Case2:いくつかの動作点で不安定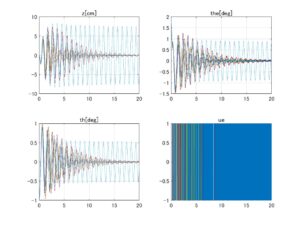 ⇒Case3:いくつかの動作点で不安定
⇒Case3:いくつかの動作点で不安定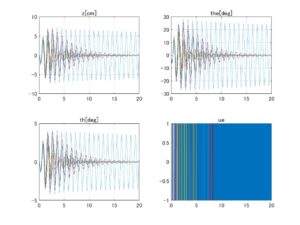 ⇒Case2:いくつかの動作点で不安定
⇒Case2:いくつかの動作点で不安定 ⇒Case3:いくつかの動作点で不安定
⇒Case3:いくつかの動作点で不安定![\displaystyle{(1.1)\quad \begin{array}{l} \underbrace{ \frac{d}{dt} \left[\begin{array}{c} z(t)-z^*\\ \theta(t)-\theta^*\\ \dot{z}(t)\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{ccccc} 0 & 0 & 1 & 0 & 0\\ 0 & 0 & 0 & 1 & 0\\ a_{52} & a_{53} & a_{55} & a_{56} & b_{52}\\ a_{62} & a_{63} & a_{65} & a_{66} & b_{62}\\ 0 & 0 & 0 & 0 & 0 \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} z(t)-z^*\\ \theta(t)-\theta^*\\ \dot{z}(t)\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{x(t)}\\ + \underbrace{ \left[\begin{array}{c} 0 \\ 0 \\ 0 \\ 0 \\ \omega_e \end{array}\right] }_{B} u(t) \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2ab91f82b36ff6c479a3662543135546_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(1.2)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{y(t)} = \underbrace{ \left[\begin{array}{ccccc} 0 & 1 & 0 & 0 & 0\\ 0 & 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 0 & 1 \end{array}\right] }_{C_M} \underbrace{ \left[\begin{array}{c} z(t)-z^*\\ \theta(t)-\theta^*\\ \dot{z}(t)\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{x(t)} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ab495fc33213399c94bb22d35ea16aa7_l3.png "Rendered by QuickLaTeX.com")
 ではなく
ではなく としていますが、制御系の評価の際に
としていますが、制御系の評価の際に
 と取付角
と取付角 で走行するとき、一定の姿勢
で走行するとき、一定の姿勢 を保つこととします。制御目的を達成する制御則として次式を考えます。
を保つこととします。制御目的を達成する制御則として次式を考えます。
 から所定の平衡入力値
から所定の平衡入力値![\displaystyle{(4)\quad \begin{array}{l} \theta_e(t)-\theta_e^* = \underbrace{ \left[\begin{array}{ccccc} 0 & 0 & 0 & 0 & 1 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} z(t)-z^*\\ \theta(t)-\theta^*\\ \dot{z}(t)\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{x(t)} \rightarrow \theta_e^c=0\quad(t\rightarrow\infty) \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b608779184f29f7dfe7199146bb182ff_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(4')\quad \left[\begin{array}{c} 0 \\ 0 \\ 0 \\ 0 \\ 0 \\\hline \theta_e^c \\ \end{array}\right] = \underbrace{ \left[\begin{array}{ccccc|c} 0 & 0 & 1 & 0 & 0 & 0\\ 0 & 0 & 0 & 1 & 0 & 0\\ a_{52} & a_{53} & a_{55} & a_{56} & b_{52}& 0\\ a_{62} & a_{63} & a_{65} & a_{66} & b_{62}& 0\\ 0 & 0 & 0 & 0 & 0 & \omega_e\\\hline 0 & 0 & 0 & 0 & 1 & 0 \end{array}\right] }_{S= \left[\begin{array}{cc} A & B\\ C & 0 \end{array}\right] } \left[\begin{array}{c} z_\infty\\ \theta_\infty\\ 0\\ 0\\ \theta_e^c \\\hline 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c97de0b2e36403d71388140469e2d777_l3.png "Rendered by QuickLaTeX.com")
 は正則ですから、任意の平衡入力値
は正則ですから、任意の平衡入力値 をもたらす状態変数
をもたらす状態変数 と
と が定まることが分かります。そこで次の
が定まることが分かります。そこで次の![\displaystyle{(5)\quad \begin{array}{l} \underbrace{ \frac{d}{dt} \left[\begin{array}{c} (z(t)-z^*)-z_\infty\\ (\theta(t)-\theta^*)-\theta_\infty\\ \dot{z}(t)\\ \dot{\theta}(t)\\ (\theta_e(t)-\theta_e^*)-\theta_e^c \\\hline u(t) \end{array}\right] }_{\dot{x}_E(t)} = \underbrace{ \left[\begin{array}{ccccc|c} 0 & 0 & 1 & 0 & 0 & 0\\ 0 & 0 & 0 & 1 & 0 & 0\\ a_{52} & a_{53} & a_{55} & a_{56} & b_{52}& 0\\ a_{62} & a_{63} & a_{65} & a_{66} & b_{62}& 0\\ 0 & 0 & 0 & 0 & 0 & \omega_e\\\hline 0 & 0 & 0 & 0 & 0 & 0 \end{array}\right] }_{A_E}\\ \times\underbrace{ \left[\begin{array}{c} (z(t)-z^*)-z_\infty\\ (\theta(t)-\theta^*)-\theta_\infty\\ \dot{z}(t)\\ \dot{\theta}(t)\\ (\theta_e(t)-\theta_e^*)-\theta_e^c \\\hline u(t) \end{array}\right] }_{x_E(t)} + \underbrace{ \left[\begin{array}{cccc} 0 \\ 0 \\ 0 \\ 0 \\ 0 \\\hline 1 \\ \end{array}\right] }_{B_E} \dot{u}(t) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-317e41c4ce1ea03263e1361d748dd7a7_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(6)\quad \dot{u}(t)=- \underbrace{ \left[\begin{array}{ccccc|c} k_{1} & k_{2} & k_{3} & k_{4} & k_{5} & k_{6} \end{array}\right] }_{K_E} \underbrace{ \left[\begin{array}{c} (z(t)-z^*)-z_\infty\\ (\theta(t)-\theta^*)-\theta_\infty\\ \dot{z}(t)\\ \dot{\theta}(t)\\ (\theta_e(t)-\theta_e^*)-\theta_e^c \\\hline u(t) \end{array}\right] }_{x_E(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f5c8452e462ac8948c3cbf386db72361_l3.png "Rendered by QuickLaTeX.com")



![\displaystyle{(8)\quad \left[\begin{array}{c} \frac{d}{dt} \left[\begin{array}{c} z(t)-z^*\\ \theta(t)-\theta^*\\ \dot{z}(t)\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \\\hline \end{array}\right]\\\hline (\theta_e(t)-\theta_e^*)-\theta_e^c \end{array}\right]=S \left[\begin{array}{c} (z(t)-z^*)-z_\infty\\ (\theta(t)-\theta^*)-\theta_\infty\\ \dot{z}(t)\\ \dot{\theta}(t)\\ (\theta_e(t)-\theta_e^*)-\theta_e^c \\\hline u(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e858ba1cacf6b5a3e9c783dfa8edd49b_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(9)\quad \dot{u}(t)=- \underbrace{ \left[\begin{array}{ccccc|c} k_{1} & k_{2} & k_{3} & k_{4} & k_{5} & k_{6} \end{array}\right]S^{-1} }_{F_E} \left[\begin{array}{c} \frac{d}{dt} \left[\begin{array}{c} z(t)-z^*\\ \theta(t)-\theta^*\\ \dot{z}(t)\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \\\hline \end{array}\right]\\\hline (\theta_e(t)-\theta_e^*)-\theta_e^c \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5274f5d7994ac45f370c81c83619df1b_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(10)\quad u(t) =- \underbrace{ \left[\begin{array}{ccccc} f_{1} & f_{2} & f_{3} & f_{4} & f_{5} \end{array}\right] }_{F} \underbrace{ \left[\begin{array}{c} z(t)-z^*\\ \theta(t)-\theta^*\\ \dot{z}(t)\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{x(t)} +\underbrace{f_6}_{F_I}\int_0^t(\theta_e^c-(\theta_e(t)-\theta_e^*))dt} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-81adf7686a5ac0ccc4cd2c19c241dac1_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(11)\quad \begin{array}{l} \underbrace{ \frac{d}{dt} \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)\\\hline z(t)-z^*\\ \dot{z}(t) \end{array}\right] }_{\dot{x}'(t)} = \underbrace{ \left[\begin{array}{ccc|cc} 0 & 1 & 0 & 0 & 0 \\ a_{63} & 0 & b_{62} & a_{62} & 0 \\ 0 & 0 & 0 & 0 & 0 \\\hline 0 & 0 & 0 & 0 & 1 \\ a_{53} & 0 & b_{52} & a_{52} & 0 \end{array}\right] }_{A'=\left[\begin{array}{cc} A'_{11} & A'_{12}\\ A'_{21} & A'_{22} \end{array}\right] } \underbrace{ \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)\\\hline z(t)-z^*\\ \dot{z}(t) \end{array}\right] }_{x'(t)}\\ + \underbrace{ \left[\begin{array}{c} 0 \\ 0 \\ \omega_e\\\hline 0 \\ 0 \end{array}\right] }_{B'=\left[\begin{array}{cc} B'_1 \\ B'_2 \end{array}\right] } u(t) \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7fe85e46a1e1633fe91083e8fe93f2a6_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(12)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t) \end{array}\right] }_{y(t)} = \underbrace{ \left[\begin{array}{ccc|cc} 1 & 0 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 & 0 \end{array}\right] }_{C'=[I_p\ 0]} \underbrace{ \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)\\\hline z(t)-z^*\\ \dot{z}(t) \end{array}\right] }_{x'(t)} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-26aac13c924dceec92a99cbc241a9571_l3.png "Rendered by QuickLaTeX.com")
 を
を![\displaystyle{(13)\quad U= \underbrace{\left[\begin{array}{ccc|cc} -\ell_{11} & -\ell_{12} & -\ell_{13} & 1 & 0 \\ -\ell_{21} & -\ell_{22} & -\ell_{23} & 0 & 1 \end{array}\right]}_{[-L\ I_{n-p}]} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-aa240c9d826b64c2ad7995e2b3c6a247_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(14)\quad \left[\begin{array}{cc} \hat{C} & \hat{D} \end{array}\right]= \left[\begin{array}{cc} U\\ C' \end{array}\right]^{-1}= \left[\begin{array}{cc} -L & I_{n-p}\\ I_p& 0 \end{array}\right]^{-1} = \left[\begin{array}{cc} 0 & I_p\\ I_{n-p}& L \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a81e366ad8d7a8533bfdef982a7a4467_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(15)\quad \begin{array}{l} \left[\begin{array}{cc} \hat{A} & \hat{B} \end{array}\right]=UA' \left[\begin{array}{cc} U\\ C' \end{array}\right]^{-1}= \left[\begin{array}{cc} -L & I_{n-p} \end{array}\right] \left[\begin{array}{cc} A'_{11} & A'_{12}\\ A'_{21} & A'_{22} \end{array}\right] \left[\begin{array}{cc} 0 & I_p\\ I_{n-p}& L \end{array}\right]\\ =\left[\begin{array}{cc} A'_{22}-LA'_{12} & A'_{21}-LA'_{11}+\hat{A}L \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6668ff8720ac61955f63a1c860c85b76_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(16)\quad \hat{J}=UB'= \left[\begin{array}{cc} -L & I_{n-p} \end{array}\right] \left[\begin{array}{c} B'_1\\ B'_2 \end{array}\right] =B'_2-LB'_1 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3fff5b23916867857c41dfb3f4a0c9d0_l3.png "Rendered by QuickLaTeX.com")
 の行列
の行列 で
で![\displaystyle{(17)\quad \hat{A} = \underbrace{\left[\begin{array}{ccc} 0 & 1 \\ a_{52} & 0 \end{array}\right]}_{A'_{22}}- \underbrace{\left[\begin{array}{ccc} \ell_{11} & \ell_{12} & \ell_{13} \\ \ell_{21} & \ell_{22} & \ell_{23} \end{array}\right]}_{L} \underbrace{\left[\begin{array}{ccc} 0 & 0 \\ a_{62} & 0 \\ 0 & 0 \end{array}\right]}_{A'_{12}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1f96c4d67fd044922c91fa9e1e1b2e71_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \begin{array}{cl} (18.1) &\left[\begin{array}{c} \dot{w}_1 \\ \dot{w}_2 \end{array}\right] = \underbrace{\left[\begin{array}{ccc} 0 & a_{52} \\ 1 & 0 \end{array}\right]}_{A'_{22}^T} \left[\begin{array}{c} w_1 \\ w_2 \end{array}\right]+ \underbrace{\left[\begin{array}{ccc} 0 & a_{62} & 0 \\ 0 & 0 & 0 \end{array}\right]}_{A'_{12}^T} \left[\begin{array}{c} v_1 \\ v_2 \\ v_3 \end{array}\right]\\ (18.2) &\left[\begin{array}{c} v_1 \\ v_2 \\ v_3 \end{array}\right]=- \underbrace{\left[\begin{array}{ccc} \ell_{11} & \ell_{21} \\ \ell_{12} & \ell_{22} \\ \ell_{13} & \ell_{23} \end{array}\right]}_{L^T} \left[\begin{array}{c} w_1 \\ w_2 \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0966560b08e71e8b9d05e93d3d1a2b46_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \begin{array}{cl} (19.1) &\left[\begin{array}{c} \dot{w}_1 \\ \dot{w}_2 \end{array}\right] = \left[\begin{array}{ccc} 0 & a_{52} \\ 1 & 0 \end{array}\right] \left[\begin{array}{c} w_1 \\ w_2 \end{array}\right]+ \left[\begin{array}{c} a_{62} \\ 0 \end{array}\right]v_2\\ (19.2) &v_2=- \left[\begin{array}{ccc} \ell_{12} & \ell_{22} \end{array}\right] \left[\begin{array}{c} w_1 \\ w_2 \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2207f89283b711b6a3dac5da3343613c_l3.png "Rendered by QuickLaTeX.com")
 、
、 )。
)。
![\displaystyle{(1')\quad \begin{array}{l} \left[\begin{array}{ccc} M+M_x & 0 & 0 \\ 0 & M+M_z & 0\\ 0 & 0 & I_y+J_y \end{array}\right] \left[\begin{array}{c} \ddot{x}\\ \ddot{z}\\ \ddot{\theta} \end{array}\right]= \left[\begin{array}{ccc} 0 & 0 & 0 \\ 0 & c_{zz} & c_{z\theta}\\ 0 & c_{\theta z} & c_{\theta\theta} \end{array}\right] \left[\begin{array}{c} \dot{x}\\ \dot{z}\\ \dot{\theta} \end{array}\right]\\ +\left[\begin{array}{c} D_b\cos\theta+(T+D_e)\cos(\theta+\theta_e)\\ -D_b\sin\theta-(T+D_e)\sin(\theta+\theta_e)\\ D_b(H_{CG}-H_D)+T(H_T-H_{De}+H_e)+D_eH_e \end{array}\right]\\ +\left[\begin{array}{c} N_L\sin\theta+N_e\sin(\theta+\theta_e)\\ N_L\cos\theta+N_e\cos(\theta+\theta_e)\\ N_LL_L+N_eL_e \end{array}\right] + \left[\begin{array}{c} 0 \\ N_B+Mg\\ N_B(L_{CG}\cos\theta-L_B) \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5fcbf114446e6f6006a4add51667c0b6_l3.png "Rendered by QuickLaTeX.com")
 はそれぞれサージ、ヒーブ、ピッチを、
はそれぞれサージ、ヒーブ、ピッチを、 はそれぞれスラスト、船外機取付角を表しています。その他の物理パラメータの説明はここでは省略します。
はそれぞれスラスト、船外機取付角を表しています。その他の物理パラメータの説明はここでは省略します。![\displaystyle{(2)\quad \xi=\left[\begin{array}{c} x\\ z\\ \theta\\\hline \dot{x}\\ \dot{z}\\ \dot{\theta} \end{array}\right],\ \zeta=\left[\begin{array}{c} T\\ \theta_e \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-289b718cdf08a7268cfcc44b2dd308bb_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(3.1)\quad \underbrace{\frac{d}{dt}\left[\begin{array}{c} x\\ z\\ \theta\\\hline \dot{x}\\ \dot{z}\\ \dot{\theta} \end{array}\right]}_{\dot{\xi}}= \underbrace{ \left[\begin{array}{c} f_1(x,z,\theta,\dot{x},\dot{z},\dot{\theta},T,\theta_e)\\ f_2(x,z,\theta,\dot{x},\dot{z},\dot{\theta},T,\theta_e)\\ f_3(x,z,\theta,\dot{x},\dot{z},\dot{\theta},T,\theta_e)\\\hline f_4(x,z,\theta,\dot{x},\dot{z},\dot{\theta},T,\theta_e)\\ f_5(x,z,\theta,\dot{x},\dot{z},\dot{\theta},T,\theta_e)\\ f_6(x,z,\theta,\dot{x},\dot{z},\dot{\theta},T,\theta_e) \end{array}\right]}_{f(\xi,\zeta)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-986df1fe9bf874b3902a899fdb7379ed_l3.png "Rendered by QuickLaTeX.com")

 を、次の平衡入力
を、次の平衡入力 によって保持することとみなすことができます。
によって保持することとみなすことができます。![\displaystyle{(4)\quad \xi^*=\left[\begin{array}{c} V^*t\\ z^*\\ \theta^*\\\hline V^*\\ 0\\ 0 \end{array}\right],\ \zeta^*=\left[\begin{array}{c} T^*\\ \theta_e^* \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5f6437de0791e355b2bdc371e694f78d_l3.png "Rendered by QuickLaTeX.com")
 を次の非線形連立方程式を解いて求めます。
を次の非線形連立方程式を解いて求めます。
![\displaystyle{(6)\quad f(\xi^*,\zeta^*)= \left[\begin{array}{c} V^*\\ 0\\ 0\\\hline 0\\ 0\\ 0 \end{array}\right]=\frac{d}{dt}\xi^* }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7f31cdd4dd69a9639cb450150aaf8339_l3.png "Rendered by QuickLaTeX.com")
 を線形近似します。
を線形近似します。

![\displaystyle{(9)\quad \begin{array}{c} \underbrace{ \frac{d}{dt} \left[\begin{array}{c} x(t)-V^*t\\ z(t)-z^*\\ \theta(t)-\theta^*\\\hline \dot{x}(t)-V^*\\ \dot{z}(t)\\ \dot{\theta}(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{ccc|ccc} 0 & 0 & 0 & 1 & 0 & 0\\ 0 & 0 & 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 0 & 0 & 1\\\hline 0 & a_{42} & a_{43} & a_{44} & a_{45} & a_{46} \\ 0 & a_{52} & a_{53} & a_{54} & a_{55} & a_{56} \\ 0 & a_{62} & a_{63} & a_{64} & a_{65} & a_{66} \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} x(t)-V^*t\\ z(t)-z^*\\ \theta(t)-\theta^*\\\hline \dot{x}(t)-V^*\\ \dot{z}(t)\\ \dot{\theta}(t) \end{array}\right] }_{x(t)}\\ + \underbrace{ \left[\begin{array}{cc} 0 & 0 \\ 0 & 0 \\ 0 & 0 \\\hline b_{41} & b_{42} \\ b_{51} & b_{52} \\ b_{61} & b_{62} \end{array}\right] }_{B} \underbrace{ \left[\begin{array}{c} T(t)-T^*\\ \theta_e(t)-\theta_e^*\\ \end{array}\right] }_{u(t)} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9015be8df754f0e7d33ca667c6ed948c_l3.png "Rendered by QuickLaTeX.com")
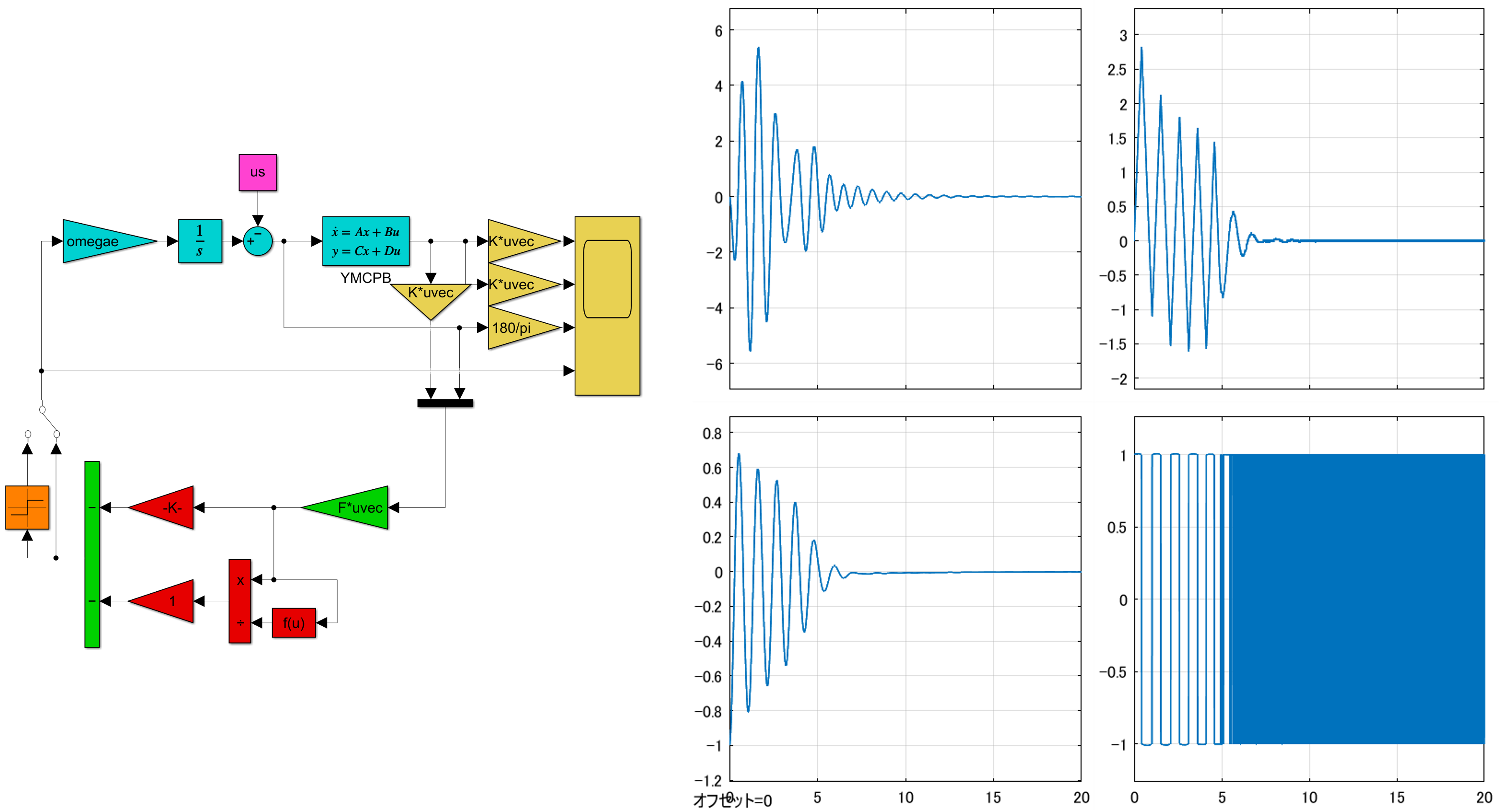
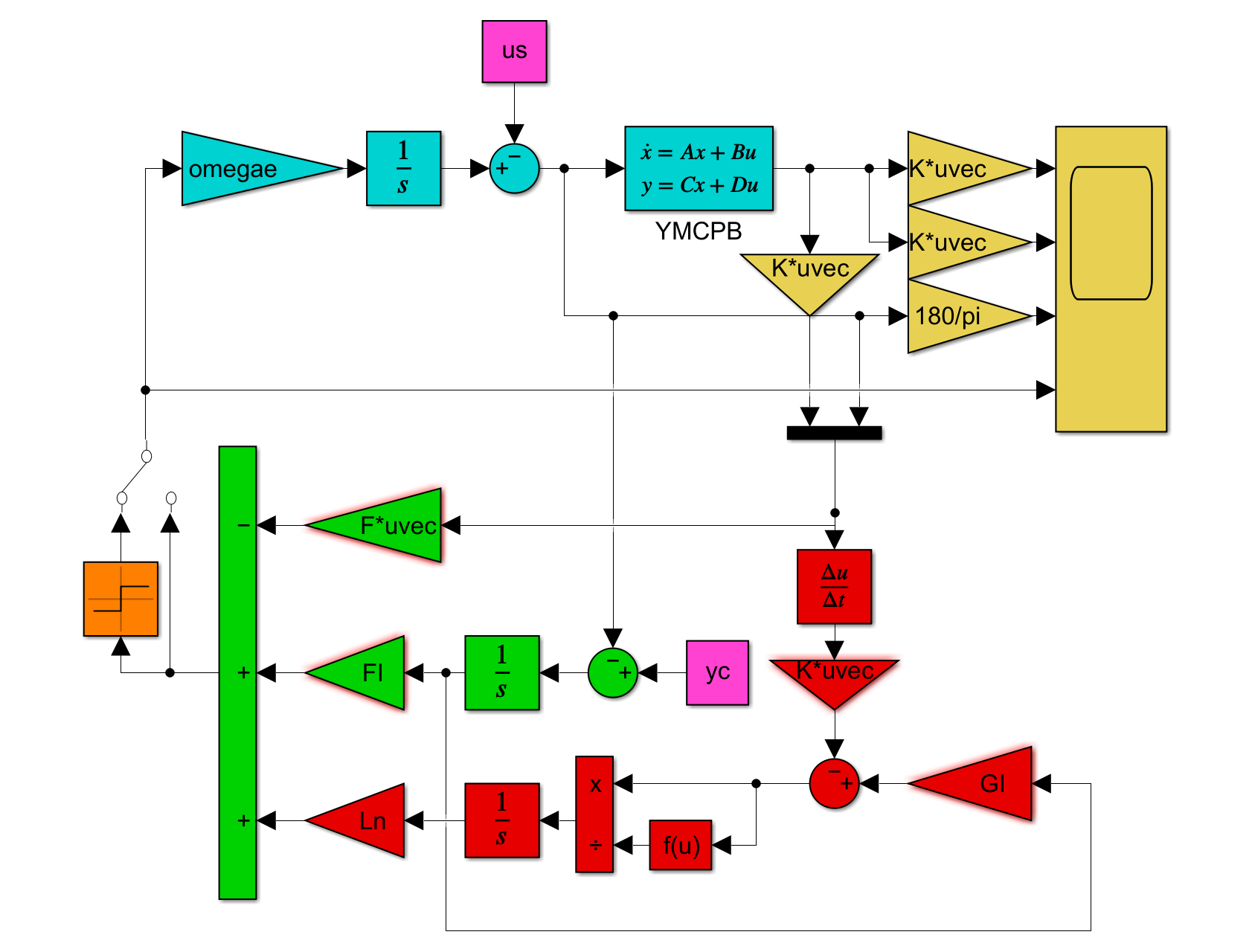
 )の平衡状態と平衡入力と
)の平衡状態と平衡入力と 行列を含みます(
行列を含みます( 行列と
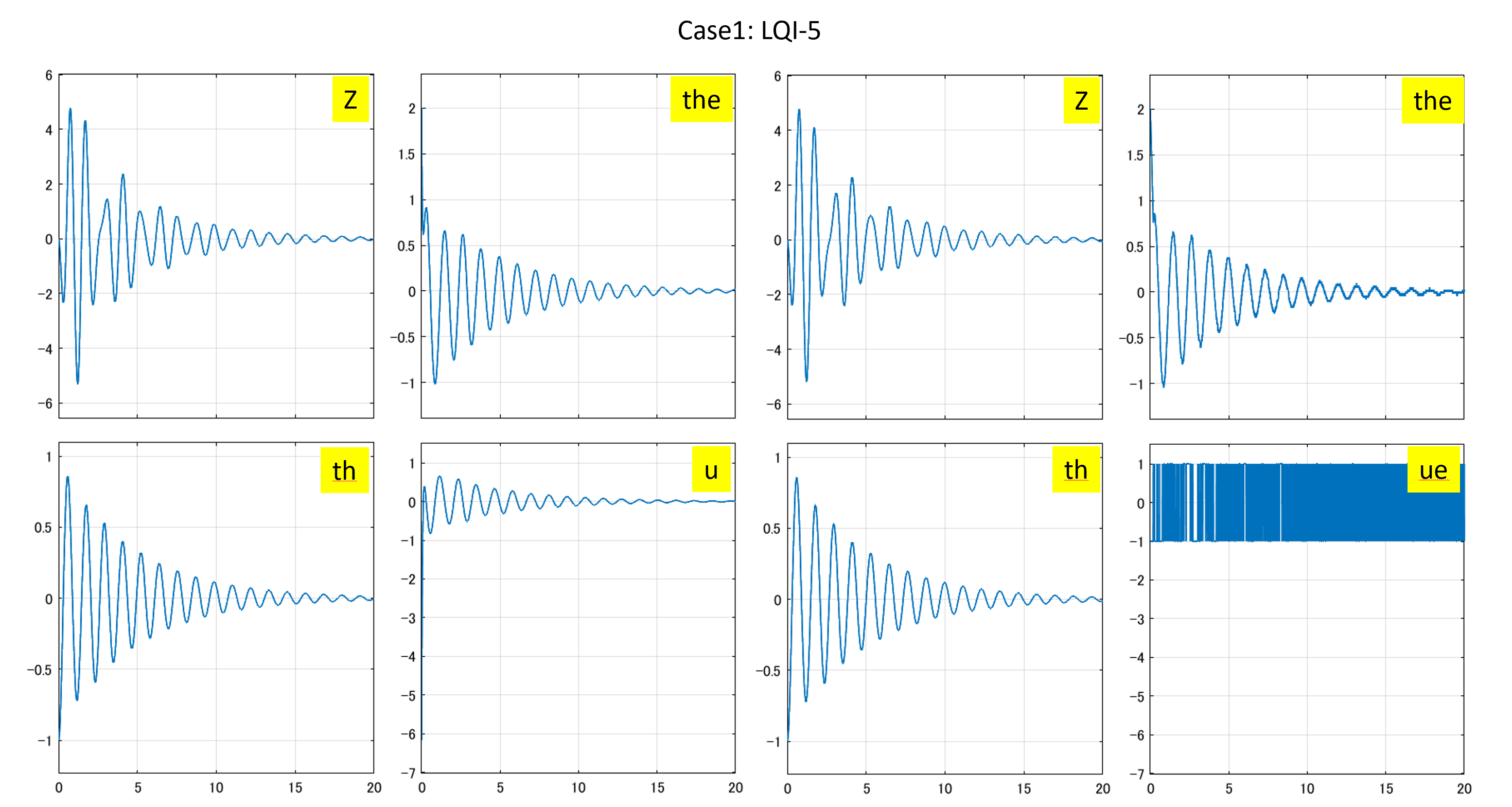
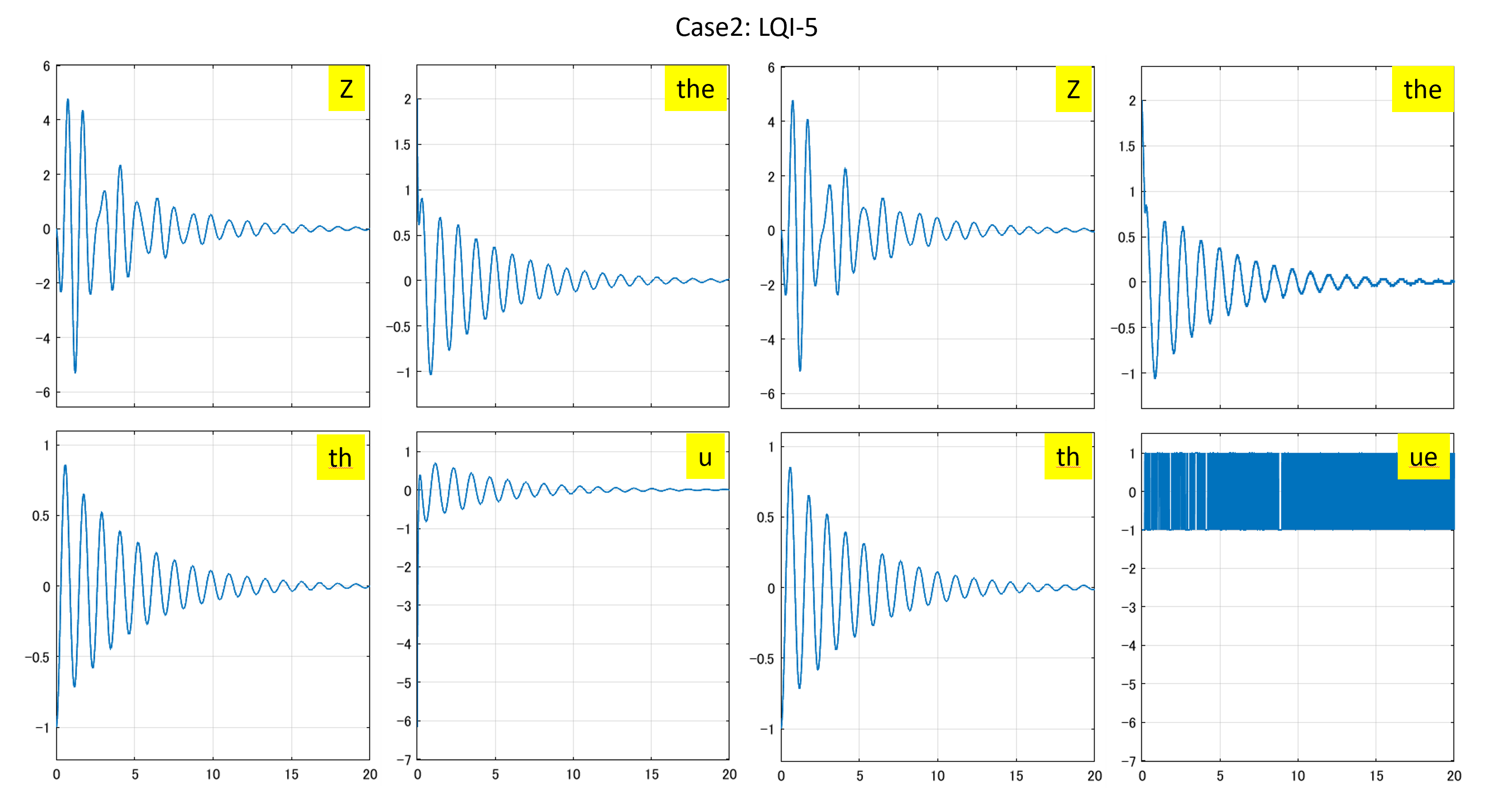
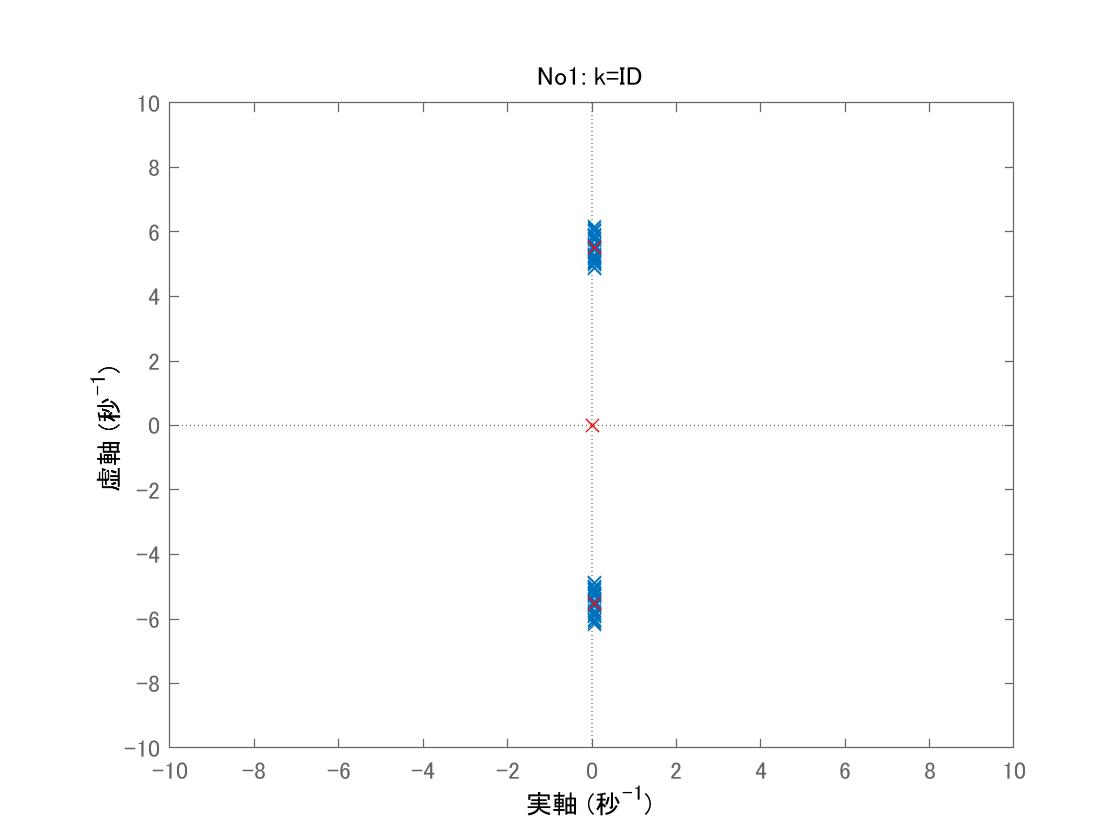
行列と 行列は固定)。これらは、たとえば、データセットNo1に対しては図1のようにグラフ化されます。
行列は固定)。これらは、たとえば、データセットNo1に対しては図1のようにグラフ化されます。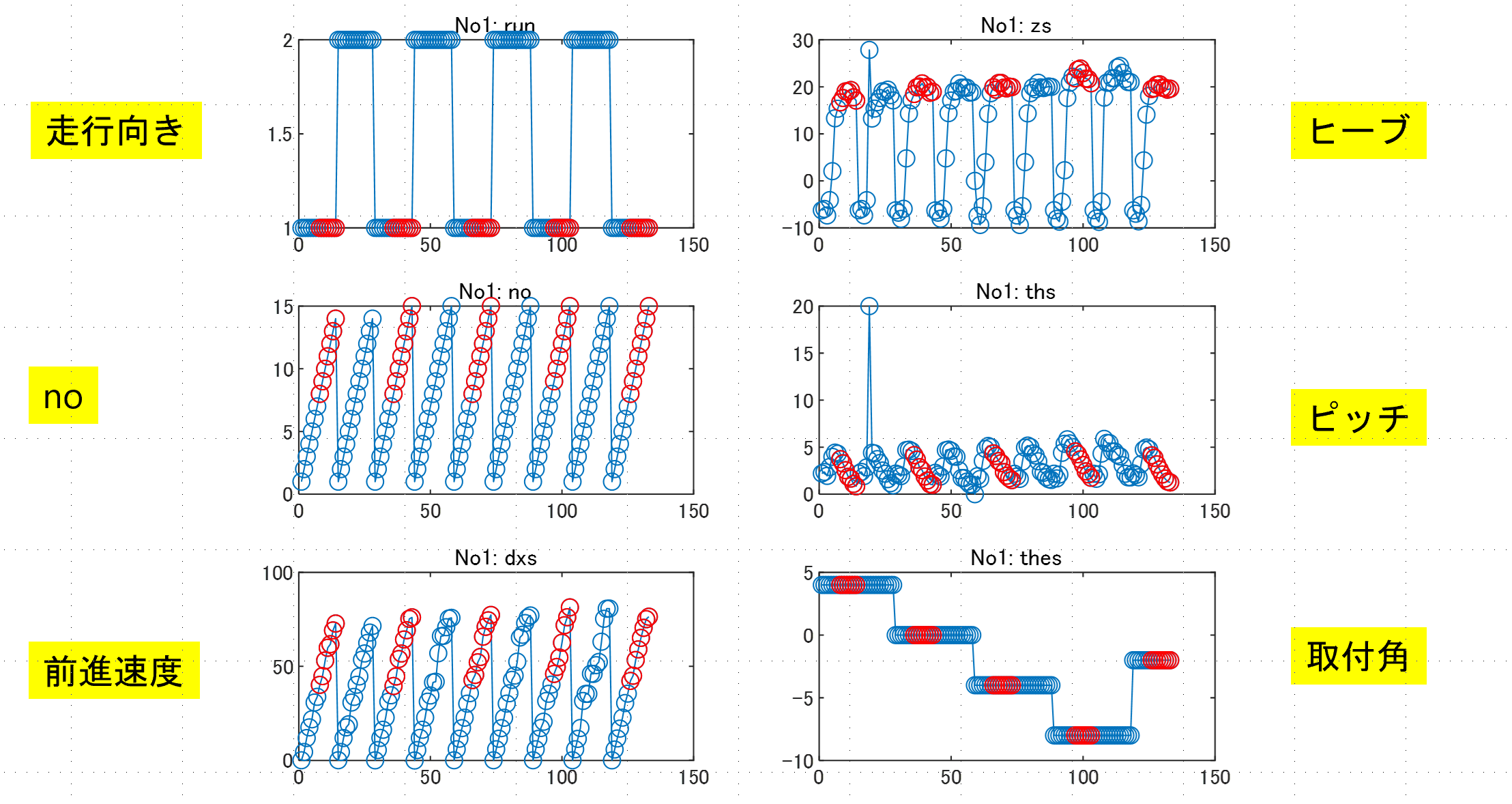
 の場合の平衡状態回りの線形モデルについてコントローラを設計します。
の場合の平衡状態回りの線形モデルについてコントローラを設計します。
 で回転するものとします。これを次式で表します。
で回転するものとします。これを次式で表します。
 、負のとき
、負のとき の値をとるものとします。すなわち
の値をとるものとします。すなわち
![\displaystyle{(12)\quad \begin{array}{c} \underbrace{ \frac{d}{dt} \left[\begin{array}{c} x(t)-V^*t\\ z(t)-z^*\\ \theta(t)-\theta^*\\\hline \dot{x}(t)-V^*\\ \dot{z}(t)\\ \dot{\theta}(t)\\\hline \theta_e(t)-\theta_e^* \end{array}\right] }_{\dot{x}_a(t)} = \underbrace{ \left[\begin{array}{ccc|ccc|c} 0 & 0 & 0 & 1 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 1 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 1 & 0\\\hline 0 & a_{42} & a_{43} & a_{44} & a_{45} & a_{46} & b_{42}\\ 0 & a_{52} & a_{53} & a_{54} & a_{55} & a_{56} & b_{52}\\ 0 & a_{62} & a_{63} & a_{64} & a_{65} & a_{66} & b_{62}\\\hline 0 & 0 & 0 & 0 & 0 & 0 & 0 \end{array}\right] }_{A_a} \underbrace{ \left[\begin{array}{c} x(t)-V^*t\\ z(t)-z^*\\ \theta(t)-\theta^*\\\hline \dot{x}(t)-V^*\\ \dot{z}(t)\\ \dot{\theta}(t)\\\hline \theta_e(t)-\theta_e^* \end{array}\right] }_{x_a(t)}\\ + \underbrace{ \left[\begin{array}{c} 0 \\ 0 \\ 0 \\\hline 0 \\ 0 \\ 0 \\\hline \omega_e \end{array}\right] }_{B_a}u_e(t) + \left[\begin{array}{c} 0 \\ 0 \\ 0 \\\hline b_{41} \\ b_{51} \\ b_{61} \\\hline 0 \end{array}\right]\underbrace{(T(t)-T^*)}_{0} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d60d11235671d929a5e705c533a692dc_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(13)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{y(t)} = \underbrace{ \left[\begin{array}{ccc|ccc|c} 0 & 0 & 1 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 0 & 0 & 0 & 1 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} x(t)-V^*t\\ z(t)-z^*\\ \theta(t)-\theta^*\\\hline \dot{x}(t)-V^*\\ \dot{z}(t)\\ \dot{\theta}(t)\\\hline \theta_e(t)-\theta_e^* \end{array}\right] }_{x(t)} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-19a5fd67356f5063740009700e8d5cd0_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(14.1)\quad \begin{array}{l} \underbrace{ \frac{d}{dt} \left[\begin{array}{c} z(t)-z^*\\ \theta(t)-\theta^*\\ \dot{z}(t)\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{ccccc} 0 & 0 & 1 & 0 & 0\\ 0 & 0 & 0 & 1 & 0\\ a_{52} & a_{53} & a_{55} & a_{56} & b_{52}\\ a_{62} & a_{63} & a_{65} & a_{66} & b_{62}\\ 0 & 0 & 0 & 0 & 0 \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} z(t)-z^*\\ \theta(t)-\theta^*\\ \dot{z}(t)\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{x(t)}\\ + \underbrace{ \left[\begin{array}{c} 0 \\ 0 \\ 0 \\ 0 \\ \omega_e \end{array}\right] }_{B} u_e(t) + \left[\begin{array}{c} 0 \\ 0 \\ a_{54} \\ a_{64} \\ 0 \end{array}\right] \underbrace{(\dot{x}(t)-V^*)}_{0} + \left[\begin{array}{c} 0 \\ 0 \\ b_{51} \\ b_{61} \\ 0 \end{array}\right]\underbrace{(T(t)-T^*)}_{0} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b66229e291e6a7c831c272149ccfd762_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(14.2)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{y(t)} = \underbrace{ \left[\begin{array}{ccccc} 0 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 0 & 1 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} z(t)-z^*\\ \theta(t)-\theta^*\\ \dot{z}(t)\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{x(t)} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-64265721f5befad0ff0fa09174416663_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(15.1)\quad \begin{array}{l} \underbrace{ \frac{d}{dt} \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{ccc} 0 & 1 & 0\\ a_{63} & a_{66} & b_{62}\\ 0 & 0 & 0 \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{c} 0 \\ 0 \\ \omega_e \end{array}\right] }_{B} u_e(t)\\ + \underbrace{\left[\begin{array}{cc} 0 & 0 \\ a_{62} & a_{65} \\ 0 & 0 \end{array}\right] \left[\begin{array}{c} z(t)-z^*\\ \dot{z}(t) \end{array}\right]}_{w(t)} + \left[\begin{array}{cc} 0 & 0 \\ a_{64} & b_{61} \\ 0 & 0 \end{array}\right] \underbrace{\left[\begin{array}{c} \dot{x}(t)-V^* \\ T(t)-T^* \end{array}\right]}_{0} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bf87259f32e1c8fdd86639d65f233881_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(15.2)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{y(t)} = \underbrace{ \left[\begin{array}{ccccc} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{x(t)} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2a21e890f7313ffc080ff529f06666fc_l3.png "Rendered by QuickLaTeX.com")

 から所定の平衡入力値
から所定の平衡入力値 として現れますので、これを抑制する必要があります。そのヒーブの振舞いは次式で表されます。
として現れますので、これを抑制する必要があります。そのヒーブの振舞いは次式で表されます。![\displaystyle{(17)\quad \begin{array}{l} \underbrace{ \frac{d}{dt} \left[\begin{array}{c} z(t)-z^*\\ \dot{z}(t) \end{array}\right] }_{\dot{x}'(t)} = \underbrace{ \left[\begin{array}{ccccc} 0 & 1 \\ a_{52} & a_{55} \end{array}\right] }_{A'} \underbrace{ \left[\begin{array}{c} z(t)-z^*\\ \dot{z}(t)\\ \end{array}\right] }_{x'(t)}\\ + \underbrace{ \left[\begin{array}{ccccc} 0 & 1 & 0\\ a_{53} & a_{56} & b_{52} \end{array}\right] }_{B'} \underbrace{ \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{y(t)}\\ + \left[\begin{array}{c} 0 \\ a_{54} \end{array}\right] \underbrace{(\dot{x}(t)-V^*)}_{0} + \left[\begin{array}{c} 0 \\ b_{51} \end{array}\right]\underbrace{(T(t)-T^*)}_{0} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d470e645c52cb94809030f2a1033637f_l3.png "Rendered by QuickLaTeX.com")
 は安定行列)なので、ピッチの安定化を速やかにできれば(
は安定行列)なので、ピッチの安定化を速やかにできれば(![\displaystyle{(18.1)\quad A= \left[\begin{array}{cccccc} 0 & 0 & 0 & 1.0000 & 0 & 0\\ 0 & 0 & 0 & 0 & 1.0000 & 0\\ 0 & 0 & 0 & 0 & 0 & 1.0000\\ 0 & 8.3458 & -6.9684 & -0.2549 & 0 & 0\\ 0 & -58.4515 & 67.9416 & 0.4686 & -0.7383 & -0.0369\\ 0 & 0.4559 & -30.3422 & -0.1922 & -0.0117 & 0.1175 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4b36eb6e0cb7156f03d9bf7681c55879_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(19.1)\quad A= \left[\begin{array}{ccccc} 0 & 0 & 1.0000 & 0 & 0\\ 0 & 0 & 0 & 1.0000 & 0\\ -58.4515 & 67.9416 & -0.7383 & -0.0369 & -0.0797\\ 0.4559 & -30.3422 & -0.0117 & 0.1175 & -2.7873\\ 0 & 0 & 0 & 0 & 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-385eb5461b75f3eab0188fc4a0c28dcf_l3.png "Rendered by QuickLaTeX.com")

 がほぼ引き継がれることが分かります。
がほぼ引き継がれることが分かります。![\displaystyle{(20.1)\quad A= \left[\begin{array}{ccc} 0 & 1.0000 & 0\\ -30.3422 & 0.1175 & -2.7873\\ 0 & 0 & 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-df1140cc4fabe39af15eb5dede652c01_l3.png "Rendered by QuickLaTeX.com")

 がほぼ引き継がれることが分かります。
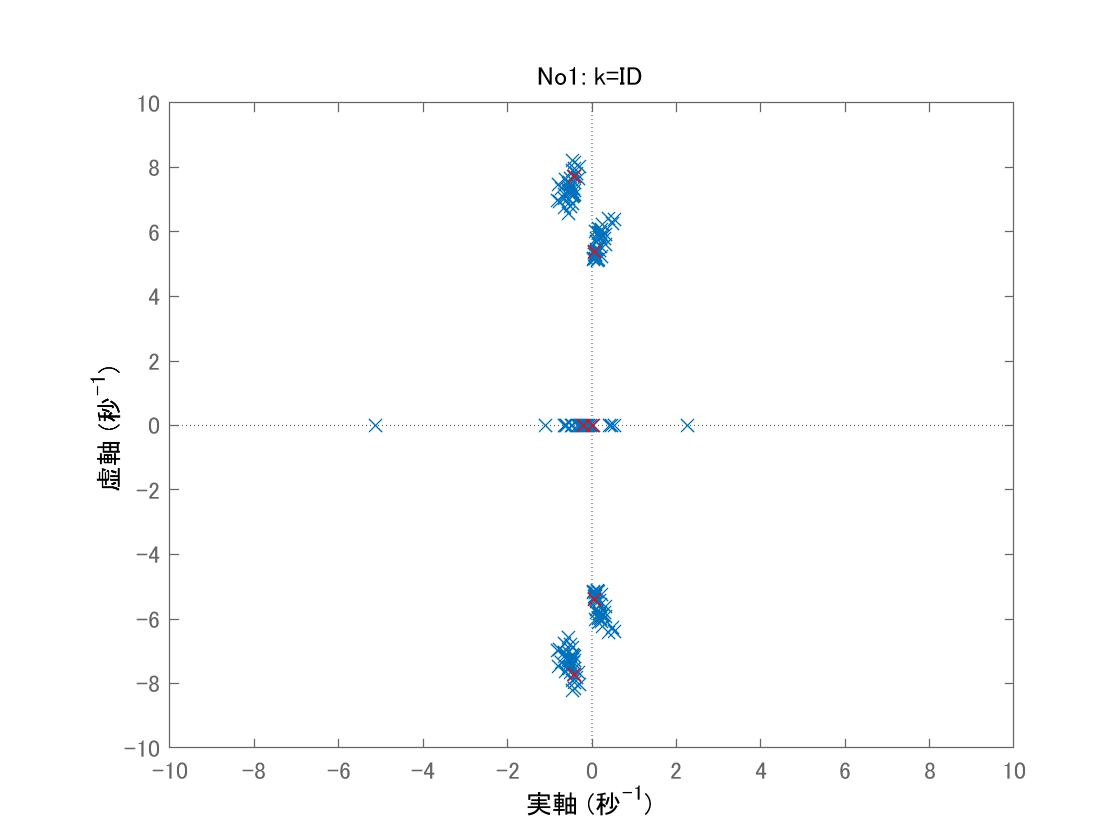
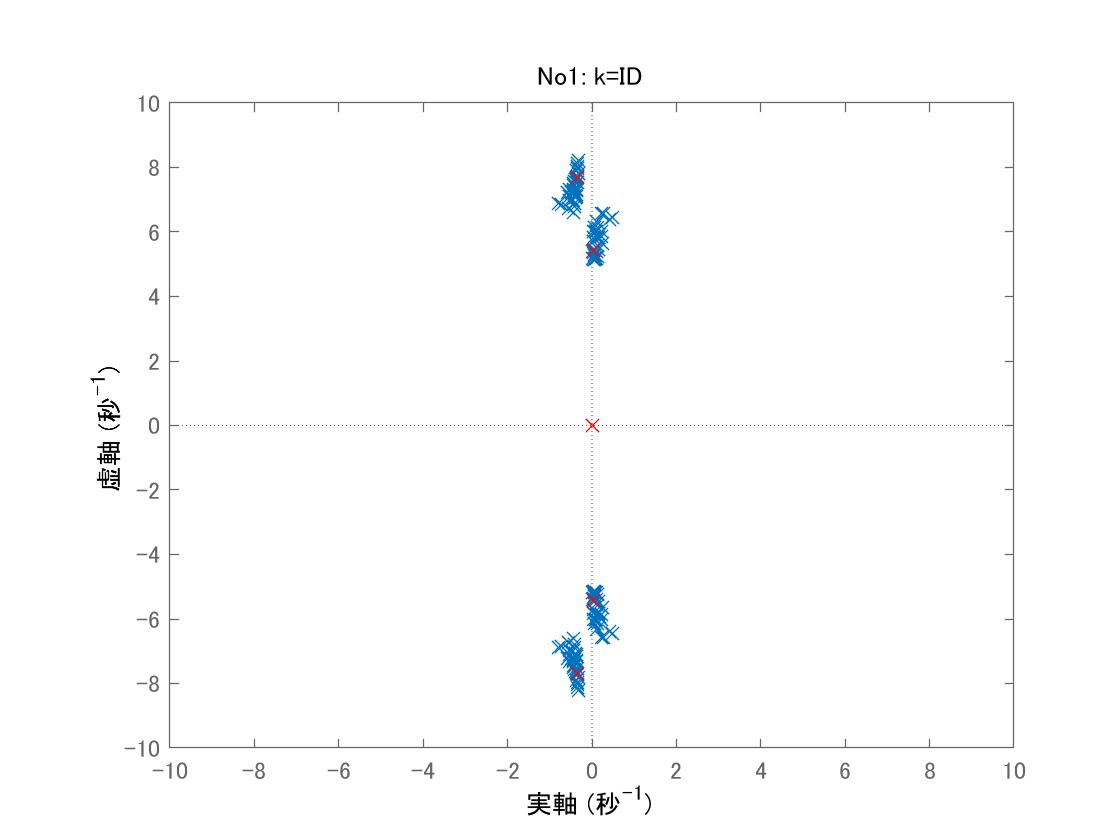
がほぼ引き継がれることが分かります。![\displaystyle{(21)\quad \left\{\begin{array}{l} \underline{\sigma}(\left[\begin{array}{cc} B & A-\lambda_1^{(5)} I_5 \end{array}\right])=0.0048^{*}\\ \underline{\sigma}(\left[\begin{array}{cc} B & A-\lambda_2^{(5)} I_5 \end{array}\right])=0.0048^{*}\\ \underline{\sigma}(\left[\begin{array}{cc} B & A-\lambda_3^{(5)} I_5 \end{array}\right])=0.0106\\ \underline{\sigma}(\left[\begin{array}{cc} B & A-\lambda_4^{(5)} I_5 \end{array}\right])=0.0106\\ \underline{\sigma}(\left[\begin{array}{cc} B & A-\lambda_5^{(5)} I_5 \end{array}\right])=0.1140\\ \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a7e4cf96c547aedfac2c36a38d07ed50_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(22)\quad \left\{\begin{array}{l} \underline{\sigma}(\left[\begin{array}{cc} C^T & A^T-\lambda_1^{(5)} I_5 \end{array}\right])=0.0146^{*}\\ \underline{\sigma}(\left[\begin{array}{cc} C^T & A^T-\lambda_2^{(5)} I_5 \end{array}\right])=0.0146^{*}\\ \underline{\sigma}(\left[\begin{array}{cc} C^T & A^T-\lambda_3^{(5)} I_5 \end{array}\right])=0.3129\\ \underline{\sigma}(\left[\begin{array}{cc} C^T & A^T-\lambda_4^{(5)} I_5 \end{array}\right])=0.3129\\ \underline{\sigma}(\left[\begin{array}{cc} C^T & A^T-\lambda_5^{(5)} I_5 \end{array}\right])=0.9940\\ \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9da4f1036a5ce1b33a3e76163bc55f97_l3.png "Rendered by QuickLaTeX.com")
![\left[\begin{array}{cc} B & A-\lambda I_5 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7ca87d6ed40fb006ec0a4103b3d2ce67_l3.png "Rendered by QuickLaTeX.com") の最小特異値は正ですから、形式的には可制御性は成り立つと判定できます。ただ、*印の値が示すように、ヒーブはピッチに比べて相対的に可制御性の程度が弱く、状態フィードバックによる固有値の変更が難しいと言えます。したがって、制御対象は可制御でなく、むしろ可安定と判定することが考えられます。
の最小特異値は正ですから、形式的には可制御性は成り立つと判定できます。ただ、*印の値が示すように、ヒーブはピッチに比べて相対的に可制御性の程度が弱く、状態フィードバックによる固有値の変更が難しいと言えます。したがって、制御対象は可制御でなく、むしろ可安定と判定することが考えられます。![\displaystyle{(15.1')\quad \begin{array}{l} \underbrace{ \frac{d}{dt} \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{ccc} 0 & 1 & 0\\ %a_{63} & a_{66} & b_{62}\\ -30.3422 & 0.1175 & -2.7873\\ 0 & 0 & 0 \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{x(t)}\\ + \underbrace{ \left[\begin{array}{c} 0 \\ 0 \\ \omega_e \end{array}\right] }_{B} u_e(t) + \underbrace{\left[\begin{array}{cc} 0 & 0 \\ %a_{62} & a_{65} \\ 0.4559 & -0.0117 \\ 0 & 0 \end{array}\right] \left[\begin{array}{c} z(t)-z^*\\ \dot{z}(t) \end{array}\right]}_{w(t)} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6f7ec1b0d02eac3e57d854255ed386a7_l3.png "Rendered by QuickLaTeX.com")
 の値がそれほど大きくなく、3次元モデルにおいても固有値が継承されることに注意します。
の値がそれほど大きくなく、3次元モデルにおいても固有値が継承されることに注意します。![\displaystyle{(17')\quad \begin{array}{l} \underbrace{ \frac{d}{dt} \left[\begin{array}{c} z(t)-z^*\\ \dot{z}(t) \end{array}\right] }_{\dot{x}'(t)} = \underbrace{ \left[\begin{array}{ccccc} 0 & 1 \\ %a_{52} & a_{55} -58.4515 & -0.7383 \end{array}\right] }_{A'} \underbrace{ \left[\begin{array}{c} z(t)-z^*\\ \dot{z}(t)\\ \end{array}\right] }_{x'(t)}\\ + \underbrace{ \left[\begin{array}{ccccc} 0 & 1 & 0\\ %a_{53} & a_{56} & b_{52} 67.9416 & -0.0369 & -0.0797 \end{array}\right] }_{B'} \underbrace{ \left[\begin{array}{c} \theta(t)-\theta^*\\ \dot{\theta}(t)\\ \theta_e(t)-\theta_e^* \end{array}\right] }_{y(t)} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-dd41b1e619c39ebfa6602dc14ea3d00c_l3.png "Rendered by QuickLaTeX.com")



![{\rm rank}\, \left[\begin{array}{cc} B & A-\lambda I_n \end{array}\right] =n](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-dee3269841bf00dddf51d7c2a639251b_l3.png "Rendered by QuickLaTeX.com") (
( は
は![{\rm rank}\, \left[\begin{array}{cccc} B & AB & \cdots & A^{n-1}B \end{array}\right]=n](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e0e816ee9de6e9a441f0a454cc5916b6_l3.png "Rendered by QuickLaTeX.com")
 を選んで,
を選んで, の固有値を任意に設定可能
の固有値を任意に設定可能![\boxed{{\rm rank}\, \left[\begin{array}{cc} B & A-\lambda I_n \end{array}\right] =n}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c093b55423fad6ab40c48e359d81b335_l3.png "Rendered by QuickLaTeX.com") (
( に対して、条件S1と条件C4に出てくる行列
に対して、条件S1と条件C4に出てくる行列![\displaystyle{(3)\quad M(\lambda_i)=\left[\begin{array}{cc} B & A-\lambda_i I_n \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-dd5feeea08a22621752b7e1dc81f9e33_l3.png "Rendered by QuickLaTeX.com")
![{\rm rank}\, \left[\begin{array}{c} C \\ A-\lambda I_n \end{array}\right]=n](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-07453f8f51e03541641efaea4dfadc27_l3.png "Rendered by QuickLaTeX.com") (
(![[0,t]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-90e01491191ec1f4f923174ff69a7a73_l3.png "Rendered by QuickLaTeX.com") 上の入出力データ
上の入出力データ![u(\tau),y(\tau)\tau\in[0,t]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4b0479ec55497b31448f2ccc5bcf5011_l3.png "Rendered by QuickLaTeX.com") から,初期状態
から,初期状態 を一意に決定できる
を一意に決定できる![{\rm rank}\, \left[\begin{array}{c} C \\ CA \\ \vdots\\ CA^{n-1} \end{array}\right] =n](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c018f5737238e4ac298d377adf711de0_l3.png "Rendered by QuickLaTeX.com")
 を選んで,
を選んで, の固有値を任意に設定可能
の固有値を任意に設定可能![\boxed{{\rm rank} \left[\begin{array}{c} C \\ A-\lambda I_n \end{array}\right]=n}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-16e4ae46fa331c1889ac8dbffdb8b61a_l3.png "Rendered by QuickLaTeX.com") (
( に対する状態FB
に対する状態FB による閉ループ系
による閉ループ系 を安定化して決定します。したがって、可検出性は
を安定化して決定します。したがって、可検出性は![\displaystyle{(4)\quad N(\lambda_i)=\left[\begin{array}{c} C \\ A-\lambda I_n \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e776c162496f8d9e863f1555ca43f6f8_l3.png "Rendered by QuickLaTeX.com")
 の非零特異値の数で決定します。したがって、条件D1と条件O4は、最小特異値が正かどうかで判定します。
の非零特異値の数で決定します。したがって、条件D1と条件O4は、最小特異値が正かどうかで判定します。


 に漸近するように構成するものです。そのためには、あるサイズ
に漸近するように構成するものです。そのためには、あるサイズ の行列
の行列
![\displaystyle{(1)\quad \left[\begin{array}{c|c} TAT^{-1} & TB \\\hline CT^{-1} & D \end{array}\right] = \left[\begin{array}{cccc|c} A_1 & 0 & X_{13} & 0 & B_1 \\ X_{21} & A_2 & X_{23} & X_{24} & B_2 \\ 0 & 0 & A_3 & 0 & 0 \\ 0 & 0 & X_{43} & A_4 & 0 \\\hline C_1 & 0 & C_3 & 0 & 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4b2e92c732c0f76c1c7685becd70b05c_l3.png "Rendered by QuickLaTeX.com")
 ,
, ,
, ,
, の次数は一意に定まり,
の次数は一意に定まり, は可制御対,
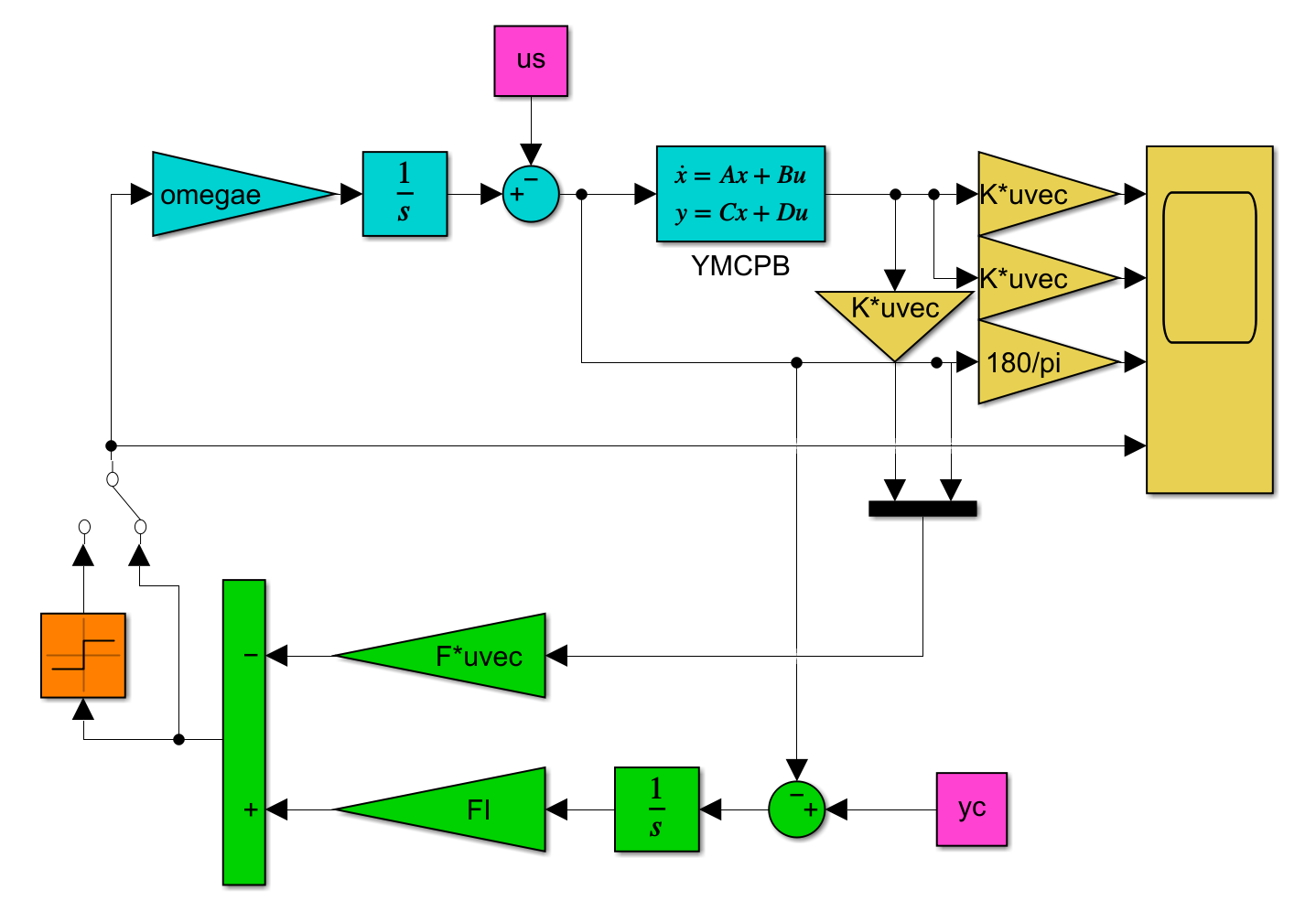
は可制御対, は可観測対です。この正準構造のブロック線図を図1に示します。
は可観測対です。この正準構造のブロック線図を図1に示します。
