
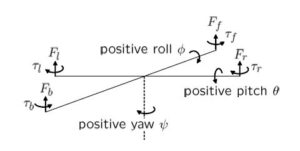
上図のようなドローンについて、次の文献をフォローしていきます。
Randal Beard: Quadrotor Dynamics and Control, Rev0.1, Brigham Young University, 2008
以下では、 、
、 をそれぞれ
をそれぞれ 、
、 と略記します。
と略記します。
準備

●上図のように、ベクトル を、ベクトル
を、ベクトル のまわりに
のまわりに だけ回転して得られるベクトル
だけ回転して得られるベクトル の表現式を求めます。
の表現式を求めます。

ただし



から、次式を得ます。

ここで



とおくと

![\displaystyle{\hat{n}\times{\bf p}= {\rm det} \left[\begin{array}{ccc} \hat{i}^0 & \hat{j}^0 & \hat{k}^0\\ \hat{n}_x & \hat{n}_y & \hat{n}_z\\ p_x^0 & p_y^0 & p_z^0 \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-987b3b87c684eb8f160259eccaed8b8c_l3.png "Rendered by QuickLaTeX.com")

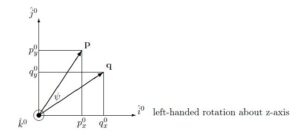
● の場合(left-handed rotation about z-axis)
の場合(left-handed rotation about z-axis)

![\displaystyle{ \underbrace{ \left[\begin{array}{c} q_x^0 \\ q_y^0 \\ q_z^0 \end{array}\right] }_{{\bf q}} =(1-C_\psi) p_z^0 \underbrace{ \left[\begin{array}{c} 0 \\ 0 \\ 1 \end{array}\right] }_{\hat{i}} \hat{n}+C_\psi \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] -S_\psi \left[\begin{array}{c} -p_y^0 \\ p_x^0 \\ 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-12d5ca14cbcc4c55826c7d6d8f899987_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ = \underbrace{ \left[\begin{array}{ccc} C_\psi & S_\psi & 0 \\ -S_\psi & C_\psi & 0 \\ 0 & 0 & 1 \end{array}\right] }_{R(\phi)} \underbrace{ \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] }_{{\bf p}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-034528a2aacb8e95ad6d97e767cee015_l3.png "Rendered by QuickLaTeX.com")
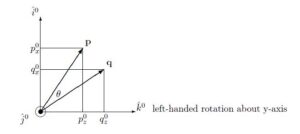
● の場合(left-handed rotation about y-axis)
の場合(left-handed rotation about y-axis)

![\displaystyle{ \underbrace{ \left[\begin{array}{c} q_x^0 \\ q_y^0 \\ q_z^0 \end{array}\right] }_{{\bf q}} =(1-C_\theta) p_y^0 \underbrace{ \left[\begin{array}{c} 0 \\ 1 \\ 0 \end{array}\right] }_{\hat{j}} \hat{n}+C_\theta \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] -S_\theta \left[\begin{array}{c} p_z^0 \\ 0\\ -p_x^0 \\ \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a989718664a4f406a703678aa7bce25c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ =\underbrace{ \left[\begin{array}{ccc} C_\theta & 0 & -S_\theta \\ 0 & 1 & 0 \\ S_\theta & 0 & C_\theta \end{array}\right] }_{R(\theta)} \underbrace{ \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] }_{{\bf p}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-77d80bf487c6766d1c677f8791183be6_l3.png "Rendered by QuickLaTeX.com")
● の場合(left-handed rotation about x-axis)
の場合(left-handed rotation about x-axis)

![\displaystyle{ \underbrace{ \left[\begin{array}{c} q_x^0 \\ q_y^0 \\ q_z^0 \end{array}\right] }_{{\bf q}} =(1-C_\phi) p_x^0 \underbrace{ \left[\begin{array}{c} 1 \\ 0 \\ 0 \end{array}\right] }_{\hat{k}} \hat{n}+C_\phi \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] -S_\phi \left[\begin{array}{c} 0\\ -p_z^0 \\ p_y^0 \\ \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-59bae1ad5756ab21b2c3dfbfa893e055_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ =\underbrace{ \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & C_\phi & S_\phi \\ 0 & -S_\phi & C_\phi \end{array}\right] }_{R(\psi)} \underbrace{ \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] }_{{\bf p}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d1ab1c6a193d60691e385bcb0e30cfb3_l3.png "Rendered by QuickLaTeX.com")

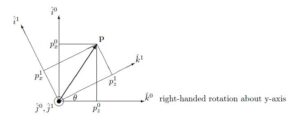
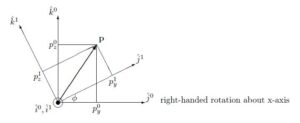
以上のようなベクトルの回転は、相対的に座標軸を回転させても、把握できます。
●right-handed rotation about z-axis







![\displaystyle{ \underbrace{ \left[\begin{array}{c} p_x^1 \\ p_y^1 \\ p_z^1 \end{array}\right] }_{{\bf p}^1} = \underbrace{ \left[\begin{array}{ccc} \hat{i}^1\cdot\hat{i}^0&\hat{i}^1\cdot\hat{j}^0&\hat{i}^1\cdot\hat{k}^0\\ \hat{j}^1\cdot\hat{i}^0&\hat{j}^1\cdot\hat{j}^0&\hat{j}^1\cdot\hat{k}^0\\ \hat{k}^1\cdot\hat{i}^0&\hat{k}^1\cdot\hat{j}^0&\hat{k}^1\cdot\hat{k}^0 \end{array}\right] }_{R_0^1(\psi)} \underbrace{ \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] }_{{\bf p}^0} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9e097cfdaee9cbb694b4d1748693d3c6_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ R_0^1(\psi)= \left[\begin{array}{ccc} C_\psi & S_\psi & 0 \\ -S_\psi & C_\psi & 0 \\ 0 & 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-58ac6cd544f764f340163f5d9e7d61aa_l3.png "Rendered by QuickLaTeX.com")

●right-handed rotation about y-axis
![\displaystyle{ \underbrace{ \left[\begin{array}{c} p_x^1 \\ p_y^1 \\ p_z^1 \end{array}\right] }_{{\bf p}^1} = \underbrace{ \left[\begin{array}{ccc} \hat{i}^1\cdot\hat{i}^0&\hat{i}^1\cdot\hat{j}^0&\hat{i}^1\cdot\hat{k}^0\\ \hat{j}^1\cdot\hat{i}^0&\hat{j}^1\cdot\hat{j}^0&\hat{j}^1\cdot\hat{k}^0\\ \hat{k}^1\cdot\hat{i}^0&\hat{k}^1\cdot\hat{j}^0&\hat{k}^1\cdot\hat{k}^0 \end{array}\right] }_{R_0^1(\theta)} \underbrace{ \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] }_{{\bf p}^0} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-aceb055a39624b49b00c52ba93b2fafc_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ R_0^1(\theta)= \left[\begin{array}{ccc} C_\theta & 0 & -S_\theta \\ 0 & 1 & 0 \\ S_\theta & 0 & C_\theta \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bc434799df6aa0435586745ed76ca371_l3.png "Rendered by QuickLaTeX.com")
●right-handed rotation about x-axis
![\displaystyle{ \underbrace{ \left[\begin{array}{c} p_x^1 \\ p_y^1 \\ p_z^1 \end{array}\right] }_{{\bf p}^1} = \underbrace{ \left[\begin{array}{ccc} \hat{i}^1\cdot\hat{i}^0&\hat{i}^1\cdot\hat{j}^0&\hat{i}^1\cdot\hat{k}^0\\ \hat{j}^1\cdot\hat{i}^0&\hat{j}^1\cdot\hat{j}^0&\hat{j}^1\cdot\hat{k}^0\\ \hat{k}^1\cdot\hat{i}^0&\hat{k}^1\cdot\hat{j}^0&\hat{k}^1\cdot\hat{k}^0 \end{array}\right] }_{R_0^1(\phi)} \underbrace{ \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] }_{{\bf p}^0} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-be939844208f01e80bd96a4578eb7d9c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ R_0^1(\phi)= \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & C_\phi & S_\phi \\ 0 & -S_\phi & C_\phi \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9e26ef5f7bc02c2f2f19b14327fc67f6_l3.png "Rendered by QuickLaTeX.com")
座標系
●ドローンの運動の記述にあたっては、次のような地上座標系 と機体固定座標系
と機体固定座標系 を用います。
を用います。

における機体の位置は次の変数で表します。
 : the inertial (north) position of the aircraft along
: the inertial (north) position of the aircraft along  in
in
 : the inertial (east) position of the aircraft along
: the inertial (east) position of the aircraft along  in
in
 : the altitude of the aircraft measured along
: the altitude of the aircraft measured along  in
in
また、は、から、次のオイラー角
 : the roll angle defined with respect to
: the roll angle defined with respect to 
 : the pitch angle defined with respect to
: the pitch angle defined with respect to 
 : the yaw angle defined with respect to
: the yaw angle defined with respect to 
を用いて、次のように逐次回転して得られます。

ここで、は原点を機体重心にもつ回転前の座標系( に平行)を表しています。
に平行)を表しています。
●における任意ベクトル(後出の位置ベクトル、速度ベクトルなど)は、から、次のような変換を行って得られます。


![\displaystyle{= \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & C_\phi & S_\phi \\ 0 & -S_\phi & C_\phi \end{array}\right] \left[\begin{array}{ccc} C_\theta & 0 & -S_\theta \\ 0 & 1 & 0 \\ S_\theta & 0 & C_\theta \end{array}\right] \left[\begin{array}{ccc} C_\psi & S_\psi & 0 \\ -S_\psi & C_\psi & 0 \\ 0 & 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-cbcf941c508f91c6e056f42732084bf5_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ = \left[\begin{array}{ccc} C_\theta C_\psi & C_\theta S_\psi & -S_\theta \\ S_\phi S_\theta C_\psi - C_\phi S_\psi & S_\phi S_\theta S_\psi + C_\phi C_\psi & S_\phi C_\theta \\ C_\phi S_\theta C_\psi + C_\phi S_\psi & C_\phi S_\theta S_\psi - S_\phi C_\psi & C_\phi C_\theta \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bb9eeb9b54c7ae5be019eb255e6bdbd8_l3.png "Rendered by QuickLaTeX.com")
●

![\displaystyle{ R_v^{v1}(\psi)= \left[\begin{array}{ccc} C_\psi & S_\psi & 0 \\ -S_\psi & C_\psi & 0 \\ 0 & 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-62a0d9a3674b84f4cc7fd9463923b711_l3.png "Rendered by QuickLaTeX.com")

●

![\displaystyle{ R_{v1}^{v2}(\theta)= \left[\begin{array}{ccc} C_\theta & 0 & -S_\theta \\ 0 & 1 & 0 \\ S_\theta & 0 & C_\theta \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-882fd5b2077da6bcc03598d35349e31f_l3.png "Rendered by QuickLaTeX.com")
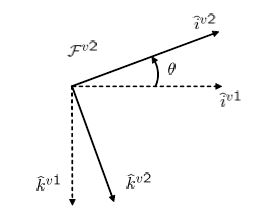
●

![\displaystyle{ R_{v2}^b(\phi)= \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & C_\phi & S_\phi \\ 0 & -S_\phi & C_\phi \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-65b7f87e8d6ceac41cc3eed6be19136b_l3.png "Rendered by QuickLaTeX.com")

●における任意ベクトル(後出の位置ベクトル、速度ベクトルなど)の時間変化がどのように表されるかを調べます。
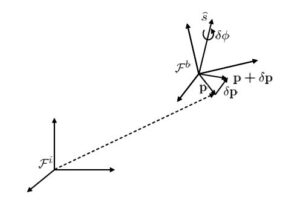
これは、次式で表されます。

実際



運動方程式
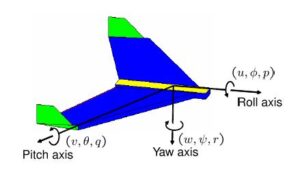
における運動は次の変数を用いて表されます。
 : the body frame velocity measured along
: the body frame velocity measured along  in
in
 : the body frame velocity measured along
: the body frame velocity measured along  in
in
 : the body frame velocity measured along
: the body frame velocity measured along  in
in
 : the roll rate measured along in
: the roll rate measured along in
 : the pitch rate measured along in
: the pitch rate measured along in
 : the yaw rate measured along in
: the yaw rate measured along in
これらがからどう表されるか、すなわち次の変数の微分とどう関係するか(キネマティックス)を調べます。
: the inertial (north) position of the quadrotor along in
: the inertial (east) position of the quadrotor along in
: the altitude of the aircraft measured along in
: the roll angle defined with respect to
: the pitch angle defined with respect to
: the yaw angle defined with respect to
●とにおける速度ベクトルについては
![\displaystyle{ \left[\begin{array}{c} u \\ v \\ w \end{array}\right] = \underbrace{ \left[\begin{array}{ccc} C_\theta C_\psi & C_\theta S_\psi & -S_\theta \\ S_\phi S_\theta C_\psi - C_\phi S_\psi & S_\phi S_\theta S_\psi + C_\phi C_\psi & S_\phi C_\theta \\ C_\phi S_\theta C_\psi + C_\phi S_\psi & C_\phi S_\theta S_\psi - S_\phi C_\psi & C_\phi C_\theta \end{array}\right] }_{R_v^b} \left[\begin{array}{c} \dot{p}_n \\ \dot{p}_e \\ -\dot{h} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-de39a8b9bd05d0eb4e506e36a8e0fa0a_l3.png "Rendered by QuickLaTeX.com")
の関係が成り立ちます。したがって、
![\displaystyle{ \left[\begin{array}{c} \dot{p}_n \\ \dot{p}_e \\ -\dot{h} \end{array}\right] = \underbrace{ \left[\begin{array}{ccc} C_\theta C_\psi &S_\phi S_\theta C_\psi - C_\phi S_\psi &C_\phi S_\theta C_\psi + C_\phi S_\psi \\ C_\theta S_\psi &S_\phi S_\theta S_\psi + C_\phi C_\psi &C_\phi S_\theta S_\psi - S_\phi C_\psi \\ -S_\theta &S_\phi C_\theta &C_\phi C_\theta \end{array}\right] }_{R_b^v=(R_v^b)^T} \left[\begin{array}{c} u \\ v \\ w \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d363a281bdd4e8b2b988be4d3069aa11_l3.png "Rendered by QuickLaTeX.com")
●とにおける角速度ベクトルについては
![\displaystyle{ \left[\begin{array}{c} p \\ q \\ r \end{array}\right] = \underbrace{R_{v2}^b(\dot{\phi})}_{I} \left[\begin{array}{c} \dot{\phi} \\ 0 \\ 0 \end{array}\right] + R_{v2}^b(\phi)\underbrace{R_{v1}^{v2}(\dot{\theta})}_{I} \left[\begin{array}{c} 0 \\ \dot{\theta} \\ 0 \end{array}\right] + R_{v2}^b(\phi)R_{v1}^{v2}(\theta)\underbrace{R_{v}^{v1}(\dot{\psi})}_{I} \left[\begin{array}{c} 0 \\ 0 \\ \dot{\psi} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a04c24d997a7e6874afdd3b415001501_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ = \left[\begin{array}{c} \dot{\phi} \\ 0 \\ 0 \end{array}\right] + \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & C_\phi & S_\phi \\ 0 & -S_\phi & C_\phi \end{array}\right] \left[\begin{array}{c} 0 \\ \dot{\theta} \\ 0 \end{array}\right] + \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & C_\phi & S_\phi \\ 0 & -S_\phi & C_\phi \end{array}\right] \left[\begin{array}{ccc} C_\theta & 0 & -S_\theta \\ 0 & 1 & 0 \\ S_\theta & 0 & C_\theta \end{array}\right] \left[\begin{array}{c} 0 \\ 0 \\ \dot{\psi} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-97c20a9db7f00180754feff31ee807c8_l3.png "Rendered by QuickLaTeX.com")
の関係が成り立ちます。したがって、
![\displaystyle{ \left[\begin{array}{c} p \\ q \\ r \end{array}\right]= \left[\begin{array}{ccc} 1 & 0 & -S_\theta \\ 0 & C_\phi & S_\phi C_\theta \\ 0 & -S_\phi & C_\phi C_\theta \end{array}\right] \left[\begin{array}{c} \dot{\phi} \\ \dot{\theta} \\ \dot{\psi} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-061d5edae9ebd68d687e9549b5a5a40b_l3.png "Rendered by QuickLaTeX.com")
すなわち、次の関係式を得ます。
![\displaystyle{ \left[\begin{array}{c} \dot{\phi} \\ \dot{\theta} \\ \dot{\psi} \end{array}\right] = \left[\begin{array}{ccc} 1 & S_\phi T_\theta & C_\phi T_\theta \\ 0 & C_\phi & -S_\phi \\ 0 & \frac{S_\phi}{C_\theta} & \frac{C_\phi}{C_\theta} \end{array}\right] \left[\begin{array}{c} p \\ q \\ r \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-10b9bc4111bd976ca0649bb42dfacd55_l3.png "Rendered by QuickLaTeX.com")
●次に並進運動(ダイナミックス)は次式で表されます。

![\displaystyle{ \frac{d}{dt}_b \left[\begin{array}{c} u\\ v\\ w \end{array}\right] + \left[\begin{array}{c} p\\ q\\ r \end{array}\right] \times \left[\begin{array}{c} u\\ v\\ w \end{array}\right] =\frac{1}{m} \left[\begin{array}{c} f_x\\ f_y\\ f_z \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f49c0967c1c1583628163273d1cc944f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \dot{u}\\ \dot{v}\\ \dot{w} \end{array}\right] =- \underbrace{ \left[\begin{array}{ccc} 0 & -r & q\\ r & 0 &-p\\ -q & p & 0 \end{array}\right] \left[\begin{array}{c} u\\ v\\ w \end{array}\right] }_{\left[\begin{array}{c} qw-rv \\ ru-pw\\ pv-qu \end{array}\right]} +\frac{1}{m} \left[\begin{array}{c} f_x\\ f_y\\ f_z \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6e5e479c4745afec971e8a449e1d7113_l3.png "Rendered by QuickLaTeX.com")
●また回転運動(ダイナミックス)は次式で表されます。


![\displaystyle{J= \left[\begin{array}{ccc} \int(y^2+z^2)dm & -\int xydm & -\int xzdm \\ -\int yxdm & \int(x^2+z^2)dm & -\int yzdm \\ -\int zxdm & -\int zydm & \int(x^2+y^2)dm \end{array}\right] =\left[\begin{array}{ccc} J_x & 0 & 0 \\ 0 & J_y & 0 \\ 0 & 0 & J_z \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-16d24597f8387fec8c1eb565263ad684_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \frac{d}{dt}_bJ \left[\begin{array}{c} p\\ q\\ r \end{array}\right] + \left[\begin{array}{c} p\\ q\\ r \end{array}\right] \times J \left[\begin{array}{c} p\\ q\\ r \end{array}\right] = \left[\begin{array}{c} \tau_\phi\\ \tau_\theta\\ \tau_\psi \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3a28be1d9f68276f11ece9ae89a59304_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} J_x\dot{p}\\ J_y\dot{q}\\ J_z\dot{r} \end{array}\right] + \underbrace{ \left[\begin{array}{ccc} 0 & -r & q\\ r & 0 &-p\\ -q & p & 0 \end{array}\right] \left[\begin{array}{c} J_xp\\ J_yq\\ J_zr \end{array}\right] }_{\left[\begin{array}{c} (J_z-J_y)qr \\ (J_x-J_z)pr\\ (J_y-J_x)pq \end{array}\right]} = \left[\begin{array}{c} \tau_\phi\\ \tau_\theta\\ \tau_\psi \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-11a81fab1a1c7f81823c26120d6d2b21_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \dot{p}\\ \dot{q}\\ \dot{r} \end{array}\right] =- \underbrace{ \left[\begin{array}{ccc} 0 & 0 & \frac{J_z-J_y}{J_x}q\\ \frac{J_x-J_z}{J_y} r & 0 & 0\\ 0 & \frac{J_y-J_x}{J_z}p & 0 \end{array}\right] \left[\begin{array}{c} p\\ q\\ r \end{array}\right] }_{ \left[\begin{array}{c} \frac{J_z-J_y}{J_x}qr \\ \frac{J_x-J_z}{J_y}pr \\ \frac{J_y-J_x}{J_z}pq \end{array}\right] } + \left[\begin{array}{c} \frac{1}{J_x}\tau_\phi\\ \frac{1}{J_y}\tau_\theta\\ \frac{1}{J_z}\tau_\psi \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3eb533fddc2cdc3acb2986b508ba0373_l3.png "Rendered by QuickLaTeX.com")
外力
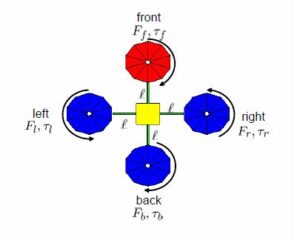
4つのモータへの回転指令を とします。このとき、各モータによる推力とトルクは次式で表されます。
とします。このとき、各モータによる推力とトルクは次式で表されます。








また、4つのモータの合推力と各軸回りのトルクは次式で表されます。




すなわち
![\displaystyle{ \left[\begin{array}{c} F\\ \tau_\phi\\ \tau_\theta\\ \tau_\psi \end{array}\right] = \underbrace{ \left[\begin{array}{cccc} k_1 & k_1 & k_1 & k_1 \\ 0 & -\ell k_1 & 0 & \ell k_1 \\ \ell k_1 & 0 & -\ell k_1 & 0 \\ -k_2 & k_2 & -k_2 & k_2 \end{array}\right] }_{{\cal M}} \left[\begin{array}{c} \delta_f\\ \delta_r\\ \delta_b\\ \delta_\ell \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2189a79e26837861510a7bb0f99f2a55_l3.png "Rendered by QuickLaTeX.com")
また、並進運動方程式の外力項は次式となります。
![\displaystyle{ \left[\begin{array}{c} f_x\\ f_y\\ f_z \end{array}\right] = R_v^b \left[\begin{array}{c} 0\\ 0\\ mg \end{array}\right] + \left[\begin{array}{c} 0\\ 0\\ -F \end{array}\right] =mg \left[\begin{array}{ccc} -S_\theta \\ S_\phi C_\theta \\ C_\phi C_\theta \end{array}\right] + \left[\begin{array}{c} 0\\ 0\\ -F \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-46b8705ff1f44fac694d366bf9bfc130_l3.png "Rendered by QuickLaTeX.com")
このときドローンの運動方程式に基づく状態方程式は次式となります。
![\displaystyle{ \left[\begin{array}{c} \dot{p}_n \\ \dot{p}_e \\ -\dot{h} \\ \hline \dot{\phi} \\ \dot{\theta} \\ \dot{\psi} \\ \hline \dot{u}\\ \dot{v}\\ \dot{w} \\ \hline \dot{p}\\ \dot{q}\\ \dot{r} \end{array}\right] = \left[\begin{array}{ccc|ccc} 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ \hline 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ \hline 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ \hline 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ \end{array}\right.}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c057cf51cb84ad35be913e5f72b6b095_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left.\begin{array}{ccc|ccc} C_\theta C_\psi &S_\phi S_\theta C_\psi - C_\phi S_\psi &C_\phi S_\theta C_\psi + C_\phi S_\psi & 0 & 0 & 0\\ C_\theta S_\psi &S_\phi S_\theta S_\psi + C_\phi C_\psi &C_\phi S_\theta S_\psi - S_\phi C_\psi & 0 & 0 & 0\\ -S_\theta &S_\phi C_\theta &C_\phi C_\theta & 0 & 0 & 0\\ \hline 0 & 0 & 0 & 1 & S_\phi T_\theta & C_\phi T_\theta \\ 0 & 0 & 0 & 0 & C_\phi & -S_\phi \\ 0 & 0 & 0 & 0 & \frac{S_\phi}{C_\theta} & \frac{C_\phi}{C_\theta}\\ \hline 0 & r &- q & 0 & 0 & 0\\ r- & 0 &p & 0 & 0 & 0\\ q & -p & 0 & 0 & 0 & 0\\ \hline 0 & 0 & 0 & 0 & 0 & -\frac{J_z-J_y}{J_x}q\\ 0 & 0 & 0 & -\frac{J_x-J_z}{J_y} r & 0 & 0\\ 0 & 0 & 0 & 0 & -\frac{J_y-J_x}{J_z}p & 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ac9a7943b0d77c3ef3dcaeb6016011e8_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \times \left[\begin{array}{c} p_n \\ p_e \\ -h \\ \hline \phi \\ \theta \\ \psi \\ \hline u\\ v\\ w \\ \hline p\\ q\\ r \end{array}\right] + \left[\begin{array}{cccc} 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ \hline 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ \hline 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ \frac{1}{m} & 0 & 0 & 0 \\ \hline 0 & \frac{1}{J_x} & 0 & 0 \\ 0 & 0 & \frac{1}{J_y} & 0 \\ 0 & 0 & 0 & \frac{1}{J_z} \\ \end{array}\right] \left[\begin{array}{cccc} k_1 & k_1 & k_1 & k_1 \\ 0 & -\ell k_1 & 0 & \ell k_1 \\ \ell k_1 & 0 & -\ell k_1 & 0 \\ -k_2 & k_2 & -k_2 & k_2 \end{array}\right]^{-1} \left[\begin{array}{c} \delta_f\\ \delta_r\\ \delta_b\\ \delta_\ell \end{array}\right] + \left[\begin{array}{c} 0 \\ 0 \\ 0 \\ \hline 0 \\ 0 \\ 0 \\ \hline -gS_\theta \\ gS_\phi C_\theta \\ gC_\phi C_\theta \\ \hline 0 \\ 0 \\ 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-dfbd76199ec24769a2fab7d91200e5dc_l3.png "Rendered by QuickLaTeX.com")
これを見ると、 行列に状態変数が絡んでおり、複雑なダイナミクスをもっていることが分かります。
行列に状態変数が絡んでおり、複雑なダイナミクスをもっていることが分かります。
運動方程式の簡単化
次の仮定のもとで、運動方程式の簡単化を行ないます。
仮定1:  、
、 、
、 は小さく無視できる
は小さく無視できる
仮定2: 、は小さく無視できる
まず、仮定1のもとで、次の近似が可能です。
![\displaystyle{ \left[\begin{array}{c} \dot{p}\\ \dot{q}\\ \dot{r} \end{array}\right] =- \left[\begin{array}{c} \frac{J_z-J_y}{J_x}qr \\ \frac{J_x-J_z}{J_y}pr \\ \frac{J_y-J_x}{J_z}pq \end{array}\right] + \left[\begin{array}{c} \frac{1}{J_x}\tau_\phi\\ \frac{1}{J_y}\tau_\theta\\ \frac{1}{J_z}\tau_\psi \end{array}\right] \simeq \left[\begin{array}{c} \frac{1}{J_x}\tau_\phi\\ \frac{1}{J_y}\tau_\theta\\ \frac{1}{J_z}\tau_\psi \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f6a1e8b9f0e32ed0de052e40acd5d9e8_l3.png "Rendered by QuickLaTeX.com")
このとき、仮定2をおけば次の近似が可能です。
![\displaystyle{ \left[\begin{array}{c} \dot{\phi} \\ \dot{\theta} \\ \dot{\psi} \end{array}\right] = \left[\begin{array}{ccc} 1 & S_\phi T_\theta & C_\phi T_\theta \\ 0 & C_\phi & -S_\phi \\ 0 & \frac{S_\phi}{C_\theta} & \frac{C_\phi}{C_\theta} \end{array}\right] \left[\begin{array}{c} p \\ q \\ r \end{array}\right] \simeq \left[\begin{array}{c} p \\ q \\ r \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7588cb998bf45f4453bd790068da25cd_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \ddot{\phi} \\ \ddot{\theta} \\ \ddot{\psi} \end{array}\right] \simeq \left[\begin{array}{c} \dot{p}\\ \dot{q}\\ \dot{r} \end{array}\right] \simeq \left[\begin{array}{c} \frac{1}{J_x}\tau_\phi\\ \frac{1}{J_y}\tau_\theta\\ \frac{1}{J_z}\tau_\psi \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c00140559d247b19ba35379d4f2fc7d2_l3.png "Rendered by QuickLaTeX.com")
これは、機体の傾きを独立して制御できることを示しています。
さらに次のような近似が可能です。
![\displaystyle{ \left[\begin{array}{c} \dot{p}_x \\ \dot{p}_y \\ \dot{p}_z \end{array}\right] = {R}_{v1}^b \left[\begin{array}{c} u \\ v \\ w \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-07b55ee0eb520a01571a66c82273a1b1_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \ddot{p}_x \\ \ddot{p}_y \\ \ddot{p}_z \end{array}\right] = \underbrace{\dot{R}_{v1}^b}_{\simeq0} \left[\begin{array}{c} {u}\\ {v}\\ {w} \end{array}\right] + {R}_{v1}^b \left[\begin{array}{c} \dot{u}\\ \dot{v}\\ \dot{w} \end{array}\right] \simeq {R}_{v1}^b \left[\begin{array}{c} \dot{u}\\ \dot{v}\\ \dot{w} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b6a4f91764dbe1ccc821cb66b6c128a3_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \ddot{p}_x \\ \ddot{p}_y \\ \ddot{p}_z \end{array}\right] \simeq \left[\begin{array}{ccc} C_\theta & S_\phi S_\theta & C_\phi S_\theta \\ 0 & C_\phi & -S_\phi \\ -S_\theta &S_\phi C_\theta &C_\phi C_\theta \end{array}\right] (g \left[\begin{array}{c} -S_\theta \\ S_\phi C_\theta \\ C_\phi C_\theta \end{array}\right] +\frac{1}{m} \left[\begin{array}{c} 0\\ 0\\ -F \end{array}\right]) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-806c2333ecc5b9e2f2176af3d06ac631_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ = \left[\begin{array}{c} 0 \\ 0 \\ g \end{array}\right] -\frac{1}{m}F \left[\begin{array}{ccc} C_\phi S_\theta \\ -S_\phi \\ C_\phi C_\theta \end{array}\right] \simeq \left[\begin{array}{c} 0 \\ 0 \\ g-\frac{1}{m}F \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a012c160125fa47849e9b54d7a6be80e_l3.png "Rendered by QuickLaTeX.com")
結局、ドローンの運動方程式は、次式のように簡単化されます。




いま,重力補償のために から決まる
から決まる を各操作入力に前もって加えておくことにすると、次式が成り立ちます。
を各操作入力に前もって加えておくことにすると、次式が成り立ちます。






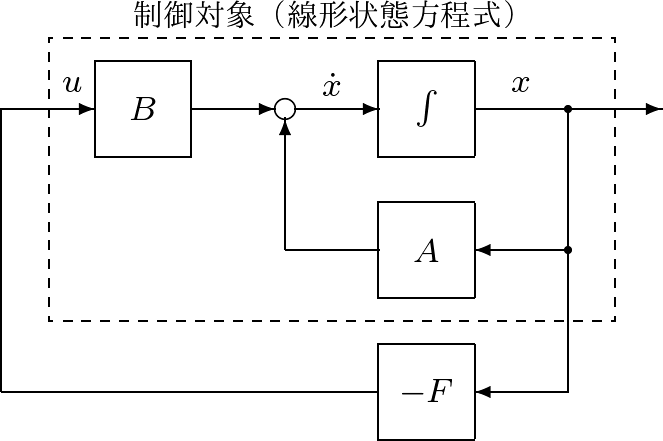
このときドローンの線形状態方程式は次式となります。
![\displaystyle{ \underbrace{ \left[\begin{array}{c} \dot{p}_z \\ \dot{\phi} \\ \dot{\theta} \\ \dot{\psi} \\\hline \ddot{z} \\ \ddot{\phi} \\ \ddot{\theta} \\ \ddot{\psi} \\ \end{array}\right] }_{\dot{x}} = \underbrace{ \left[\begin{array}{cccc|cccc} 0 & 0 & 0 & 0 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 1 \\\hline 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ \end{array}\right] }_{A} % \left[\begin{array}{c|c} % 0_{4\times4} & I_4 \\\hline % 0_{4\times4} & 0_{4\times4} % \end{array}\right] \underbrace{ \left[\begin{array}{c} {p_z} \\ {\phi} \\ {\theta} \\ {\psi} \\\hline \dot{z} \\ \dot{\phi} \\ \dot{\theta} \\ \dot{\psi} \\ \end{array}\right] }_{x} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c2d526861def4102dd037941437ebbd2_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{+ \underbrace{ \left[\begin{array}{cccc} 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\\hline -\frac{k_f}{m} & -\frac{k_f}{m} & -\frac{k_f}{m} & -\frac{k_f}{m} \\ 0 & -\frac{\ell k_f}{J_x} & 0 & \frac{\ell k_f}{J_x} \\ \frac{\ell k_f}{J_y} & 0 & -\frac{\ell k_f}{J_y} & 0 \\ -\frac{k_\tau}{J_z} & \frac{k_\tau}{J_z} & -\frac{k_\tau}{J_z} & \frac{k_\tau}{J_z} \\ \end{array}\right] }_{B} % \left[\begin{array}{c} % 0_{4\times4} \\ % B_2 \\ % \end{array}\right] \underbrace{ \left[\begin{array}{c} \delta_f-\delta^* \\ \delta_r-\delta^* \\ \delta_b-\delta^* \\ \delta_\ell-\delta^* \\ \end{array}\right] }_{u} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b01d89585d73ec5fff8e27c5c03036e2_l3.png "Rendered by QuickLaTeX.com")
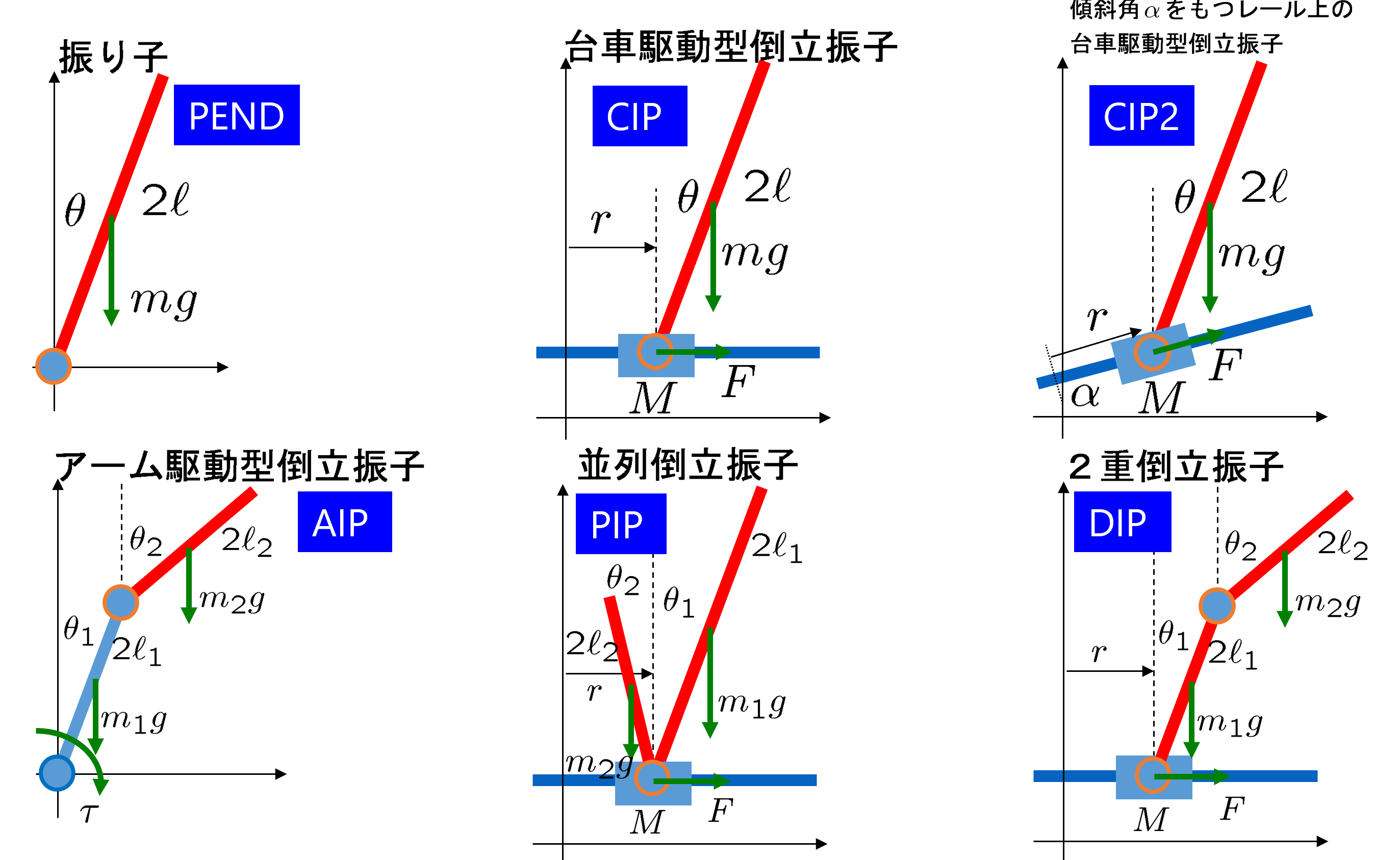 図1 様々な倒立振子
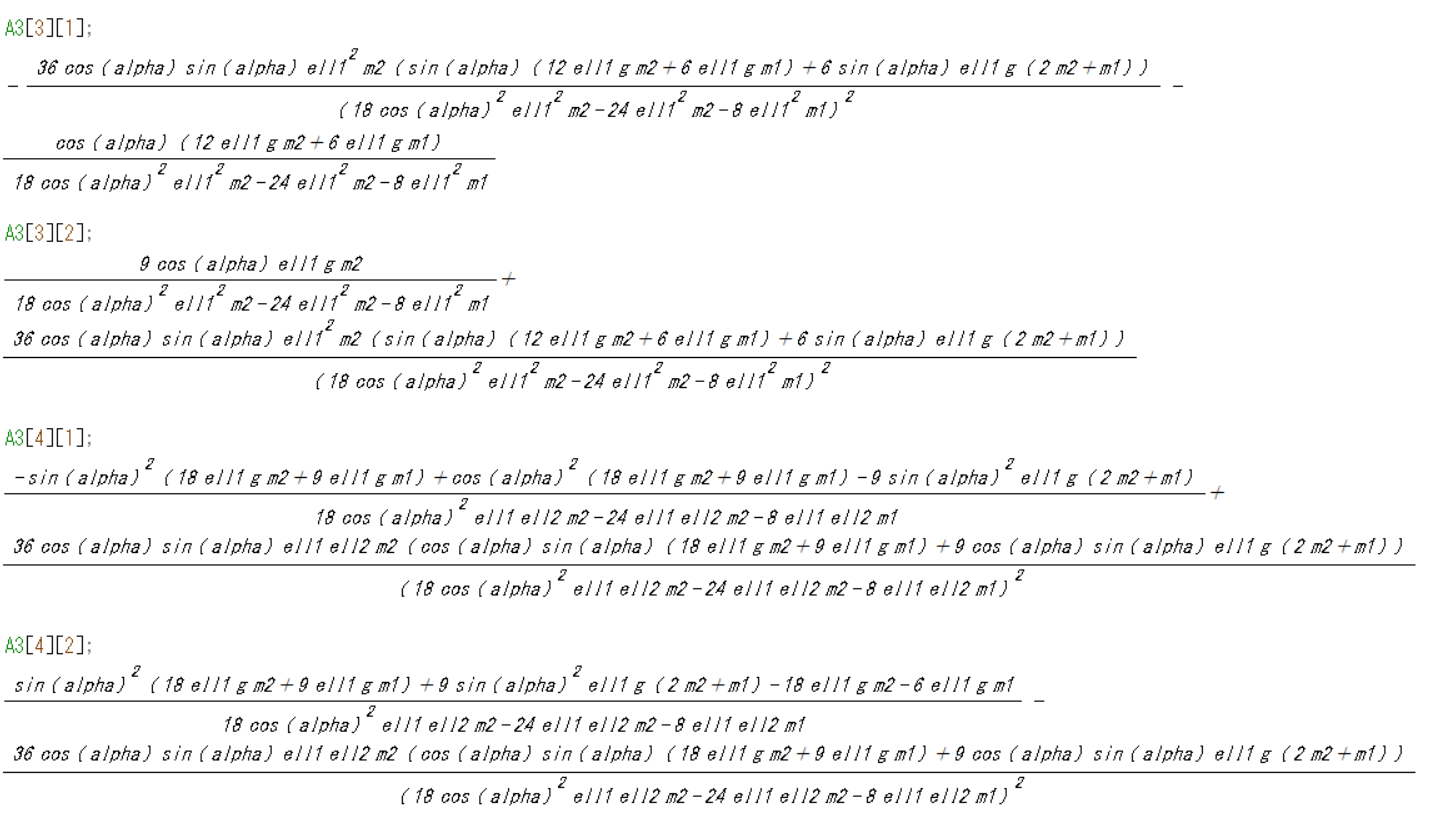
図1 様々な倒立振子 運動方程式の導出(数式処理の利用)
運動方程式の導出(数式処理の利用)
 平衡状態の検討(fsolveの利用)
平衡状態の検討(fsolveの利用)

 非線形状態方程式の導出(S-functionの作成)
非線形状態方程式の導出(S-functionの作成)![\displaystyle{(1.3)\quad \frac{d}{dt} \left[\begin{array}{l} \theta \\ \dot{\theta} \end{array}\right] = \left[\begin{array}{l} \dot{\theta} \\ \frac{3g}{4\ell}\sin\theta \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d830fdb0e97a88ec46c71221f084f8ac_l3.png "Rendered by QuickLaTeX.com")
 非線形シミュレータの開発(平衡状態の保持)
非線形シミュレータの開発(平衡状態の保持) 線形化(linmodの利用)
線形化(linmodの利用)![\displaystyle{(1.5)\quad \frac{d}{dt}\left[\begin{array}{c} \theta-\theta^*\\ \dot{\theta} \end{array}\right] = \left[\begin{array}{cc} 0 & 1\\ \frac{3g\cos\theta^*}{4\ell} & 0 \end{array}\right] \left[\begin{array}{cc} \theta-\theta^*\\ \dot{\theta} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4010d6a39f12f930e6d806a4a857fdd8_l3.png "Rendered by QuickLaTeX.com")
 線形シミュレータの開発
線形シミュレータの開発![(2.1)\quad \begin{array}{l} \displaystyle{\underbrace{ \left[\begin{array}{ccc} M+m & m\ell\cos\theta \\ m\ell\cos\theta & \frac{4}{3}m\ell^2 \end{array}\right] }_{M(\xi_1)} \underbrace{ \left[\begin{array}{c} \ddot{r} \\ \ddot{\theta} \end{array}\right] }_{\dot{\xi}_2}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0 & -m\ell\sin\theta\dot{\theta} \\ 0 & 0 \end{array}\right] }_{C(\xi_1,\xi_2)} \underbrace{ \left[\begin{array}{c} \dot{r} \\ \dot{\theta} \end{array}\right] }_{\dot{\xi}_1}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0\\ -m\ell g\sin\theta \end{array}\right] }_{G(\xi_1)} = \underbrace{ \left[\begin{array}{c} 1 \\ 0 \end{array}\right] F}_{\tilde{F}}} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b6b8157fad48af615f079cdbabc05028_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(2.3)\quad \frac{d}{dt} \left[\begin{array}{l} \xi_1 \\ \xi_2 \end{array}\right] = \left[\begin{array}{l} \xi_2 \\ M^{-1}(\xi_1)(\tilde{F}-C(\xi_1,\xi_2)\dot{\xi}_1}-G(\xi_1)) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-452f10bbd6c4136f4f3d332fb2dec185_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(2.5)\quad \frac{d}{dt}\left[\begin{array}{c} r\\ \theta-\theta^*\\ \dot{r}\\ \dot{\theta} \end{array}\right] = \left[\begin{array}{cccc} 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 1\\ 0 & -\frac{3gm}{4M+m} & 0 & 0\\ 0 & \frac{3(M+m)g}{(4M+m)\ell} & 0 & 0\\ \end{array}\right] \left[\begin{array}{c} r\\ \theta-\theta^*\\ \dot{r}\\ \dot{\theta} \end{array}\right] + \left[\begin{array}{c} 0\\ 0\\ \frac{4}{4M+m}\\ \frac{3}{(4M+m)\ell} \end{array}\right] F }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-fae8887f4f90143f54cd71d63289bc0f_l3.png "Rendered by QuickLaTeX.com")
![(3.1)\quad \begin{array}{l} \displaystyle{\underbrace{ \left[\begin{array}{ccc} M+m & m\ell\cos(\theta+\alpha) \\ m\ell\cos(\theta+\alpha) & \frac{4}{3}m\ell^2 \end{array}\right] }_{M(\xi_1)} \underbrace{ \left[\begin{array}{c} \ddot{r} \\ \ddot{\theta} \end{array}\right] }_{\dot{\xi}_2}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0 & -m\ell\sin(\theta+\alpha)\dot{\theta} \\ 0 & 0 \end{array}\right] }_{C(\xi_1,\xi_2)} \underbrace{ \left[\begin{array}{c} \dot{r} \\ \dot{\theta} \end{array}\right] }_{\dot{\xi}_1}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} (M+m)g\sin\alpha\\ -m\ell g\sin\theta \end{array}\right] }_{G(\xi_1)} = \left[\begin{array}{c} 1 \\ 0 \end{array}\right] F} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9e90c77e32ef0131c7f6472d28283498_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(3.3)\quad \frac{d}{dt} \left[\begin{array}{l} \xi_1 \\ \xi_2 \end{array}\right] = \left[\begin{array}{l} \xi_2 \\ M^{-1}(\xi_1)(\tilde{F}-C(\xi_1,\xi_2)\dot{\xi}_1}-G(\xi_1)) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e10e1b7c9308602afa499d38c4e73370_l3.png "Rendered by QuickLaTeX.com")
![(3.5)\quad \begin{array}{l} \displaystyle{\frac{d}{dt}\left[\begin{array}{c} r\\ \theta-\theta^*\\ \dot{r}\\ \dot{\theta} \end{array}\right] = \left[\begin{array}{cccc} 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 1\\ 0 & -\frac{6\cos\alpha mg}{8M+(5-3\cos2\alpha)m} & 0 & 0\\ 0 & \frac{6(M+m)g}{(8M+(5-3\cos2\alpha)m)\ell} & 0 & 0\\ \end{array}\right] \left[\begin{array}{c} r\\ \theta-\theta^*\\ \dot{r}\\ \dot{\theta} \end{array}\right]}\\ \displaystyle{+ \left[\begin{array}{c} 0\\ 0\\ \frac{8}{8M+(5-3\cos2\alpha)m}\\ \frac{6\cos\alpha}{(8M+(5-3\cos2\alpha)m)\ell} \end{array}\right] (F-F^*)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-93deb9744dd26e8ee2880e1528f961ab_l3.png "Rendered by QuickLaTeX.com")
![(4.1)\quad \begin{array}{l} \displaystyle{\underbrace{ \left[\begin{array}{ccc} (\frac{4}{3}m_1+4m_2)\ell_1^2 & 2m_2\ell_1\ell_2\cos(\theta_2-\theta_1)\\ 2m_2\ell_1\ell_2\cos(\theta_2-\theta_1) & \frac{4}{3}m_2\ell_2^2 \end{array}\right] }_{M(\xi_1)} \underbrace{ \left[\begin{array}{c} \ddot{\theta}_1 \\ \ddot{\theta}_2 \end{array}\right] }_{\dot{\xi}_2}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0 & -2m_2\ell_1\ell_2\sin(\theta_2-\theta_1) \dot{\theta}_2\\ 2m_2\ell_1\ell_2\sin(\theta_2-\theta_1) \dot{\theta}_1 & 0\\ \end{array}\right] }_{C(\xi_1,\xi_2)} \underbrace{ \left[\begin{array}{c} \dot{\theta}_1 \\ \dot{\theta}_2 \end{array}\right] }_{\dot{\xi}_1}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} -(m_1+2m_2)\ell_1g\sin\theta_1\\ -m_2\ell_2g\sin\theta_2 \end{array}\right] }_{G(\xi_1)} = \underbrace{ \left[\begin{array}{c} 1 \\ 0 \end{array}\right] \tau}_{\tilde{\tau}}} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-76a26f1d085c39daa570b8cee71ac8eb_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(4.3)\quad \frac{d}{dt} \left[\begin{array}{l} \xi_1 \\ \xi_2 \end{array}\right] = \left[\begin{array}{l} \xi_2 \\ M^{-1}(\xi_1)(\tilde{\tau}-C(\xi_1,\xi_2)\dot{\xi}_1}-G(\xi_1)) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ed617e1b892b0fac0fb9a23698e93c1a_l3.png "Rendered by QuickLaTeX.com")
 の場合の平衡状態(4.2a):
の場合の平衡状態(4.2a):![(4.5a)\quad \begin{array}{l} \displaystyle{\frac{d}{dt}\left[\begin{array}{c} \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right] =}\\ \displaystyle{\left[\begin{array}{cccc} 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 1\\ \frac{3(m_1+2m_2)g}{(4m_1+3m_2)\ell_1} & -\frac{9m_2g}{2(4m_1+3m_2)\ell_1} & 0 & 0\\ -\frac{9(m_1+2m_2)g}{2(4m_1+3m_2)\ell_1} & \frac{9m_2g}{(4m_1+3m_2)\ell_2} & 0 & 0\\ \end{array}\right] \left[\begin{array}{c} \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right]}\\ \displaystyle{+ \left[\begin{array}{c} 0\\ 0\\ \frac{6}{2(4m_1+3m_2)\ell_1^2}\\ -\frac{9}{2(4m_1+3m_2)\ell_1\ell_2} \end{array}\right] (\tau-\tau^*)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a11a4d24890d0850335707e48115c732_l3.png "Rendered by QuickLaTeX.com")
 の場合の平衡状態(4.2a):
の場合の平衡状態(4.2a):![(4.5b)\quad \begin{array}{l} \displaystyle{\frac{d}{dt}\left[\begin{array}{c} \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right] =}\\ \displaystyle{\left[\begin{array}{cccc} 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 1\\ a_{31}(\alpha) & a_{32}(\alpha) & 0 & 0\\ a_{41}(\alpha) & a_{42}(\alpha) & 0 & 0 \end{array}\right] \left[\begin{array}{c} \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right]}\\ \displaystyle{+ \left[\begin{array}{c} 0\\ 0\\ \frac{6}{2(4m_1+3(4-3\cos^2\alpha)m_2)\ell_1^2}\\ -\frac{6}{2(4m_1+3(4-3\cos^2\alpha)m_2)\ell_1\ell_2} \end{array}\right] (\tau-\tau^*)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bbff369ea90195fe12e62e338448cbcd_l3.png "Rendered by QuickLaTeX.com")
![(5.1)\quad \begin{array}{l} \displaystyle{\underbrace{ \left[\begin{array}{ccc} M+m_1+m_2 & (m_1+2m_2)\ell_1\cos\theta_1 & m_2\ell_2\cos\theta_2\\ (m_1+2m_2)\ell_1\cos\theta_1 & (\frac{4}{3}m_1+4m_2)\ell_1^2 & 2m_2\ell_1\ell_2\cos(\theta_2-\theta_1)\\ m_2\ell_2\cos\theta_2 & 2m_2\ell_1\ell_2\cos(\theta_2-\theta_1) & \frac{4}{3}m_2\ell_2^2 \end{array}\right] }_{M(\xi_1)} \underbrace{ \left[\begin{array}{c} \ddot{r} \\ \ddot{\theta}_1 \\ \ddot{\theta}_2 \end{array}\right] }_{\dot{\xi}_2}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0 & -(m_1+2m_2)\ell_2\sin\theta_2 \dot{\theta}_1 & -m_2\ell_2\sin\theta_2 \dot{\theta}_2\\ 0 & 0 & 2m_2\ell_1\ell_2\sin(\theta_2-\theta_1) \dot{\theta}_2\\ 0 & 2m_2\ell_1\ell_2\sin(\theta_2-\theta_1) \dot{\theta}_1 & 0\\ \end{array}\right] }_{C(\xi_1,\xi_2)} \underbrace{ \left[\begin{array}{c} \dot{r} \\ \dot{\theta}_1 \\ \dot{\theta}_2 \end{array}\right] }_{\dot{\xi}_1}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0 \\ (m_1+3m_2)\ell_1g\sin\theta_1\\ -m_2\ell_2g\sin\theta_2 \end{array}\right] }_{G(\xi_1)} = \underbrace{ \left[\begin{array}{c} 1 \\ 0 \\ 0 \end{array}\right] F}_{\tilde{F}} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-31c39d9c40fa5f71f3c50512937de667_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(5.3)\quad \frac{d}{dt} \left[\begin{array}{l} \xi_1 \\ \xi_2 \end{array}\right] = \left[\begin{array}{l} \xi_2 \\ M^{-1}(\xi_1)(\tilde{F}-C(\xi_1,\xi_2)\dot{\xi}_1}-G(\xi_1)) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5e0178287e8a843a2c71cba4423ef44f_l3.png "Rendered by QuickLaTeX.com")
![(5.5)\quad \begin{array}{l} \displaystyle{\frac{d}{dt}\left[\begin{array}{c} r\\ \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{r}\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right] =}\\ \displaystyle{\left[\begin{array}{cccccc} 0 & 0 & 0 & 1 & 0 & 0\\ 0 & 0 & 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 0 & 0 & 1\\ 0 & -\frac{3m_1g}{4M+m_1+m_2} & -\frac{3m_2g}{4M+m_1+m_2} & 0 & 0 & 0\\ 0 & \frac{3(4m+4m_1+m_2)g}{4(4M+m_1+m_2)\ell_1} & \frac{9m_2g}{4(4M+m_1+m_2)\ell_1} & 0 & 0& 0\\ 0 & \frac{9gm_1}{4(4M+m_1+m_2)\ell_2} & \frac{3(4m+m_1+4m_2)g}{4(4M+m_1+m_2)\ell_2} & 0 & 0& 0\\ \end{array}\right] \left[\begin{array}{c} r\\ \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{r}\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right]}\\ \displaystyle{+ \left[\begin{array}{c} 0\\ 0\\ 0\\ \frac{4}{4M+m_1+m_2}\\ -\frac{3}{(4M+m_1+m_2)\ell_1}\\ -\frac{3}{(4M+m_1+m_2)\ell_2} \end{array}\right] F \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8554645545e9bed2d603331493dd90b7_l3.png "Rendered by QuickLaTeX.com")
![(6.1)\quad \begin{array}{l} \displaystyle{\underbrace{ \left[\begin{array}{ccc} M+m_1+m_2 & m_1\ell_1\cos\theta_1 & -m_2\ell_2\cos\theta_2\\ m_1\ell_1\cos\theta_1 & \frac{4}{3}m_1\ell_1^2 & 0\\ -m_2\ell_2\cos\theta_2 & 0 & \frac{4}{3}m_2\ell_2^2 \end{array}\right] }_{M(\xi_1)} \underbrace{ \left[\begin{array}{c} \ddot{r} \\ \ddot{\theta}_1 \\ \ddot{\theta}_2 \end{array}\right] }_{\dot{\xi}_2}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0 & -m_1\ell_2\sin\theta_2 \dot{\theta}_1 & -m_2\ell_2\sin\theta_2 \dot{\theta}_2\\ 0 & 0 & 0\\ 0 & 0 & 0\\ \end{array}\right] }_{C(\xi_1,\xi_2)} \underbrace{ \left[\begin{array}{c} \dot{r} \\ \dot{\theta}_1 \\ \dot{\theta}_2 \end{array}\right] }_{\dot{\xi}_1}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0 \\ -m_1\ell_1g\sin\theta_1\\ -m_2\ell_2g\sin\theta_2 \end{array}\right] }_{G(\xi_1)} = \underbrace{ \left[\begin{array}{c} 1 \\ 0 \\ 0 \end{array}\right] F}_{\tilde{F}} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-93481c5d4d113644bf7b152b46e9779f_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(6.3)\quad \frac{d}{dt} \left[\begin{array}{l} \xi_1 \\ \xi_2 \end{array}\right] = \left[\begin{array}{l} \xi_2 \\ M^{-1}(\xi_1)(\tilde{F}-C(\xi_1,\xi_2)\dot{\xi}_1}-G(\xi_1)) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f9fbb15ced10e0dab00dfb8c25024a6a_l3.png "Rendered by QuickLaTeX.com")
![(6.5)\quad \begin{array}{l} \displaystyle{ \frac{d}{dt}\left[\begin{array}{c} r\\ \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{r}\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right] =}\\ \displaystyle{ \left[\begin{array}{cccccc} 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & -\frac{3m_1g}{Mm_1+m_1^2+(3M+m1)m_2} & -\frac{3m_2g}{Mm_1+m_1^2+(3M+m1)m_2} \\ 0 & \frac{3(4Mm_1+4m_1^2+3m_2^2+3(18M+13m_1)m_2)g}{(4Mm_1+m_1^2+(3M+m1)m_2)\ell_1} & \frac{9(2M+m_1)m_2g}{(4Mm_1+m_1^2+(3M+m1)m_2)\ell_1} \\ 0 & \frac{9(2Mm_1+m_1^2+3(2M+m_1)m_2)g}{(4Mm_1+m_1^2+(3M+m_1)m_2)\ell_2} & \frac{3(4Mm_1+m_1^2+12(3M+m_1)m_2)g}{(4Mm_1+m_1^2+(3M+m_1)m_2)\ell_2} \\ \end{array}\right.}\\ \displaystyle{\left.\begin{array}{cccccc} 1 & 0 & 0\\ 0 & 1 & 0\\ 0 & 0 & 1\\ 0 & 0 & 0\\ 0 & 0 & 0\\ 0 & 0 & 0\\ \end{array}\right] \left[\begin{array}{c} r\\ \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{r}\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right]}\\ \displaystyle{+ \left[\begin{array}{c} 0\\ 0\\ 0\\ \frac{4m_1+3m_2}{4Mm_1+m_1^2+(3M+m1)m_2}\\ -\frac{3(2m_1+m2)}{2Mm_1+m_1^2+(3M+m1)m_2}\\ \frac{3m_1}{2(4Mm_1+m_1^2+(3M+m_1)m_2)\ell_2} \end{array}\right] F} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0ded80f948ddab3f936f91c1c7ea13d2_l3.png "Rendered by QuickLaTeX.com")
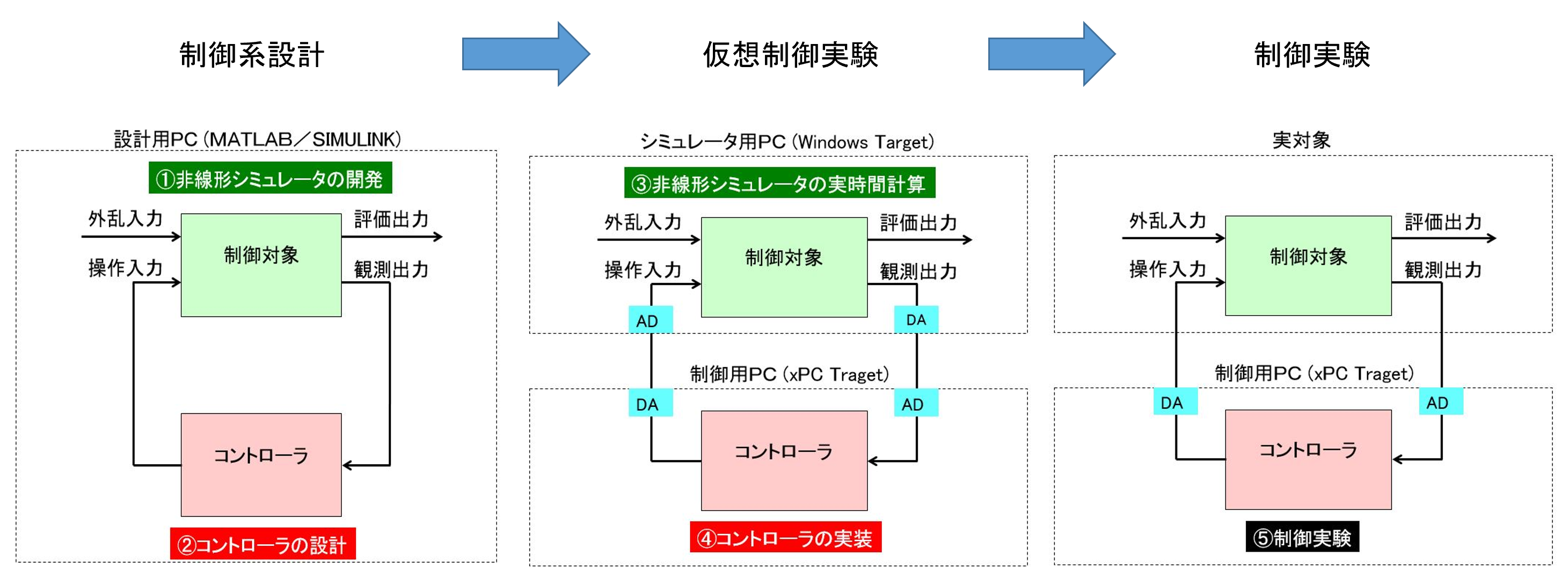 図1 HILS アプローチ
図1 HILS アプローチ 図2 単振り子
図2 単振り子
 は振り子の長さ、
は振り子の長さ、 は重りの質量、
は重りの質量、 は重力加速度、
は重力加速度、 は時刻
は時刻 における振り子の鉛直線となす角度を表しています。初期時刻
における振り子の鉛直線となす角度を表しています。初期時刻 では
では とします。
とします。



 のときは(平衡状態近傍では)両者に差異は見られませんが、90
のときは(平衡状態近傍では)両者に差異は見られませんが、90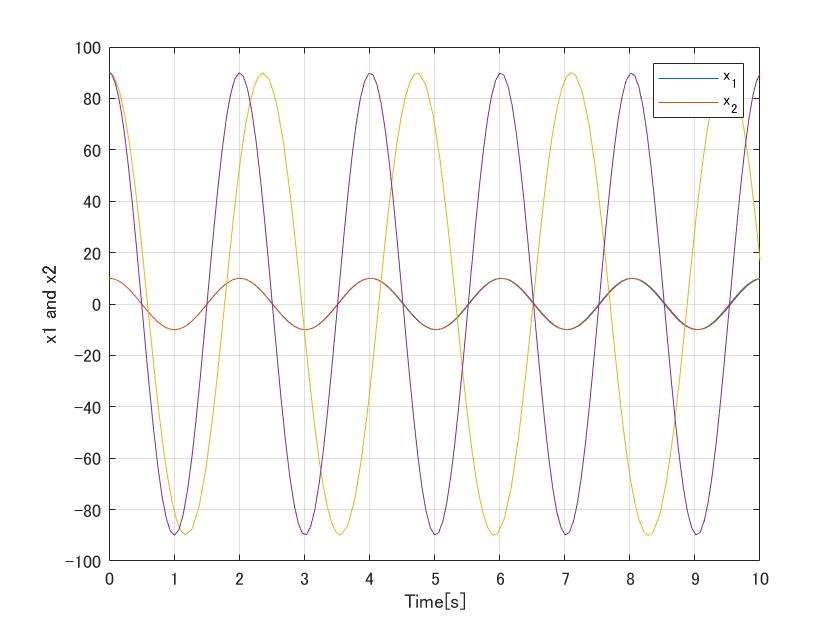 図3 単振り子の振動シミュレーション(モデルが線形か非線形か、初期状態を平衡状態周辺にとるかによる相違)
図3 単振り子の振動シミュレーション(モデルが線形か非線形か、初期状態を平衡状態周辺にとるかによる相違)![\displaystyle{(6)\quad \underbrace{ \left[\begin{array}{l} \dot{\theta}(t) \\ \dot{\omega}(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{l} \omega(t) \\ -\frac{g}{L}\sin\theta(t) \end{array}\right] }_{f(x(t))} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ded67215525ba40fa5155a4367ed7405_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(7)\quad \underbrace{ \left[\begin{array}{l} \dot{\theta}(t) \\ \dot{\omega}(t) \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\frac{g}{L}&0 \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{l} \theta(t) \\ \omega(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ed5a0aa97035fe65dba8b64944a4a569_l3.png "Rendered by QuickLaTeX.com")
 図4 水タンクTANK
図4 水タンクTANK  、
、 、
、 とします。タンクの断面積を
とします。タンクの断面積を とすると、運動方程式は次式となります。
とすると、運動方程式は次式となります。
 と平衡入力
と平衡入力 が次式のように求まります。
が次式のように求まります。

 図5 TANKの非線形シミュレータ
図5 TANKの非線形シミュレータ に対して零状態
に対して零状態 が出力される」
が出力される」

 図6 TANKの線形シミュレータ
図6 TANKの線形シミュレータ のとき、水位
のとき、水位 の平衡状態にあるとします。今、バケツで水を入れたため、水位が
の平衡状態にあるとします。今、バケツで水を入れたため、水位が になったとします。このとき、平衡状態に戻る過程を非線形シミュレータと線形シミュレータで比較した結果を図7に示します。
になったとします。このとき、平衡状態に戻る過程を非線形シミュレータと線形シミュレータで比較した結果を図7に示します。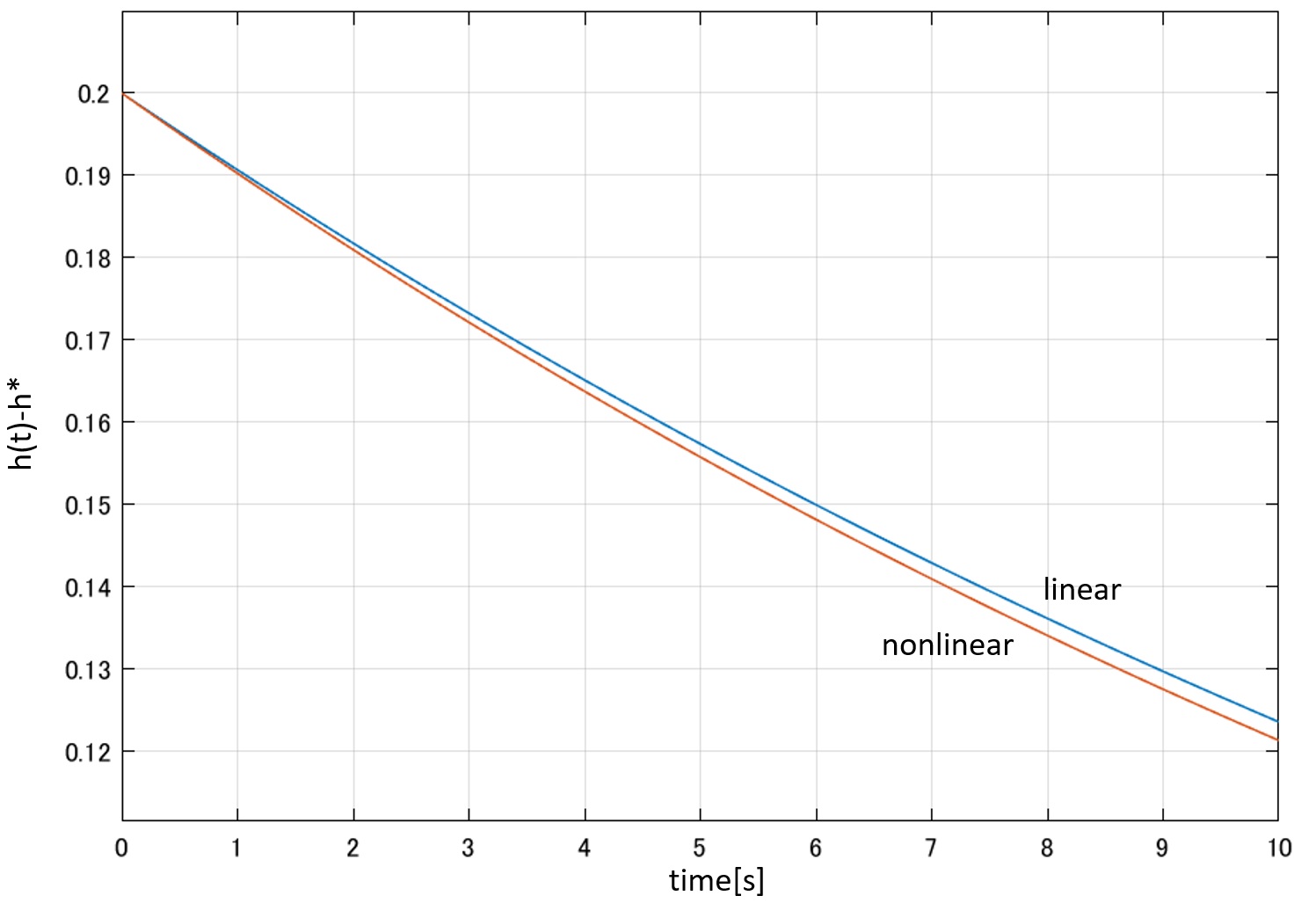 図7 TANKの非線形応答と線形応答の比較
図7 TANKの非線形応答と線形応答の比較 図8 TANKの非線形シミュレータと線形シミュレータ
図8 TANKの非線形シミュレータと線形シミュレータ を状態変数、
を状態変数、 を入力変数として、運動方程式から、次のような連立1階微分方程式で表される非線形状態方程式を得ます。
を入力変数として、運動方程式から、次のような連立1階微分方程式で表される非線形状態方程式を得ます。
 が状態変数ベクトル、
が状態変数ベクトル、 が入力変数ベクトルです。
が入力変数ベクトルです。![\displaystyle{(14)\quad \boxed{\dot{\xi}=f(\xi,\zeta)}\ \Leftrightarrow\ \underbrace{ \left[\begin{array}{l} \dot{\xi}_1 \\ \vdots \\ \dot{\xi}_n \end{array}\right] }_{\dot{\xi}} = \underbrace{ \left[\begin{array}{l} f_1(\xi,\zeta) \\ \quad\vdots \\ f_n(\xi,\zeta) \end{array}\right] }_{f(\xi,\zeta)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-92634287f13e8775d2c2a6ec25c7567c_l3.png "Rendered by QuickLaTeX.com")
 と平衡入力
と平衡入力 は
は
 を1次近似すると次式を得ます。
を1次近似すると次式を得ます。
![\displaystyle{(17)\quad A=\frac{\partial\,f(\xi^*,\zeta^*)}{\partial\,\xi}= \left[\begin{array}{ccc} \frac{\partial f_1(\xi^*,\zeta^*)}{\partial \xi_1}&\cdots& \frac{\partial f_1(\xi^*,\zeta^*)}{\partial \xi_n}\\ \vdots&\ddots&\vdots\\ \frac{\partial f_n(\xi^*,\zeta^*)}{\partial \xi_1}&\cdots& \frac{\partial f_n(\xi^*,\zeta^*)}{\partial \xi_n} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9cbb1299b9fef4d94b388578973f2dd3_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(18)\quad B=\frac{\partial\,f(\xi^*,\zeta^*)}{\partial\,\zeta}= \left[\begin{array}{ccc} \frac{\partial f_1(\xi^*,\zeta^*)}{\partial \zeta_1}&\cdots& \frac{\partial f_1(\xi^*,\zeta^*)}{\partial \zeta_m}\\ \vdots&\ddots&\vdots\\ \frac{\partial f_n(\xi^*,\zeta^*)}{\partial \zeta_1}&\cdots& \frac{\partial f_n(\xi^*,\zeta^*)}{\partial \zeta_m} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-02d8fb9441471b4730389431ccc6f27c_l3.png "Rendered by QuickLaTeX.com")

 にあることを意味し、これは平衡入力
にあることを意味し、これは平衡入力 によってもたらされるので「零入力
によってもたらされるので「零入力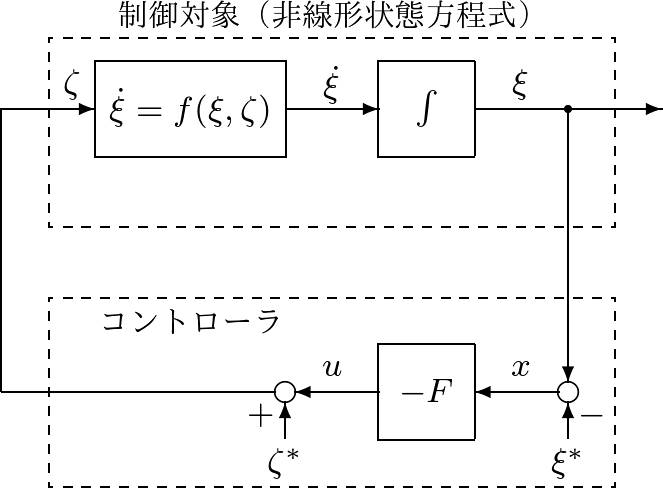
![\displaystyle{(20)\quad \underbrace{ \frac{d}{dt} \left[\begin{array}{cc} \xi_1-\xi_1^* \\ \xi_2-\xi_2^* \end{array}\right] }_{\dot{x}=\dot{\xi}-\dot{\xi}^*}= \underbrace{ \left[\begin{array}{cc} \frac{\partial f_1(\xi^*,\tau^*)}{\partial \xi_1} & \frac{\partial f_1(\xi^*,\tau^*)}{\partial \xi_2} \\ \frac{\partial f_2(\xi^*,\tau^*)}{\partial \xi_1} & \frac{\partial f_2(\xi^*,\tau^*)}{\partial \xi_2} \end{array}\right] }_{A=\frac{\partial f(\xi^*,\tau^*)}{\partial \xi}} \underbrace{ \left[\begin{array}{l} \xi_1-\xi_1^* \\ \xi_2-\xi_2^* \end{array}\right] }_{x=\xi-\xi^*} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f2c5af558fdbb6c9d48962d44eed85a8_l3.png "Rendered by QuickLaTeX.com")
 自由度をもつ力学系の場合、運動方程式の一般式は
自由度をもつ力学系の場合、運動方程式の一般式は
 は
は は
は![\displaystyle{(22)\quad \underbrace{\frac{d}{dt} \left[\begin{array}{l} \xi_1 \\ \xi_2 \end{array}\right]}_{\dot{\xi}} =\underbrace{ \left[\begin{array}{l} \xi_2 \\ M^{-1}(\xi_1)(\zeta-C(\xi_1,\xi_2)\xi_2-G(\xi_1)) \end{array}\right]}_{f(\xi,\zeta)}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5135df93ea761445ca840c16e381cc07_l3.png "Rendered by QuickLaTeX.com")
![\xi^*= \left[\begin{array}{l} \xi^*_1 \\ \xi^*_2 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b2e8fb0c2029e2f9c4a9ec4f3801cd5f_l3.png "Rendered by QuickLaTeX.com") と平衡入力
と平衡入力
![\displaystyle{(24)\quad \underbrace{ \frac{d}{dt} \left[\begin{array}{cc} \xi_1-\xi_1^* \\ \xi_2-\xi_2^* \end{array}\right] }_{\dot{x}}= \underbrace{ \left[\begin{array}{cc} 0 & I_n \\ A_{21} & A_{22} \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{l} \xi_1-\xi_1^* \\ \xi_2-\xi_2^* \end{array}\right] }_{x}+ \underbrace{ \left[\begin{array}{cc} 0 \\ B_2 \end{array}\right] }_{B} \underbrace{ (\zeta-\zeta^*) }_{u} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-367b63505bbc335acbc7077f5650a169_l3.png "Rendered by QuickLaTeX.com")
 )と(
)と( )をもつところが単振り子と違います。(
)をもつところが単振り子と違います。( 図1 剛体振り子
図1 剛体振り子
 は棒の長さ、
は棒の長さ、 は、まず重心回りの慣性モーメント
は、まず重心回りの慣性モーメント![\displaystyle{(2)\quad J_0=\int_{-\ell}^{\ell}r^2\,dm=\int_{-\ell}^{\ell}r^2\,\frac{m}{2\ell}dr=\frac{m}{2\ell}\left[\frac{r^3}{3}\right]_{-\ell}^{\ell}=\frac{1}{3}m\ell^2 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5b186df97274bc07ea869b8969f417a2_l3.png "Rendered by QuickLaTeX.com")
 から
から

 の
の における展開式
における展開式
 )、
)、 として
として
 )、
)、 として
として
![\displaystyle{(8)\quad \underbrace{ \left[\begin{array}{l} \dot{\theta}(t) \\ \dot{\omega}(t) \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\frac{3g}{4\ell}&0 \end{array}\right] }_{A_\alpha} \underbrace{ \left[\begin{array}{l} \theta(t) \\ \omega(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-aab7f16339e56d265534f36b3b8a9366_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(9)\quad \underbrace{ \frac{d}{dt} \left[\begin{array}{l} \theta(t)-\pi \\ \omega(t)-0 \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ \frac{3g}{4\ell}&0 \end{array}\right] }_{A_\beta} \underbrace{ \left[\begin{array}{l} \theta(t)-\pi \\ \omega(t)-0 \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-89b5ecb0d715edc56311f92b25c00853_l3.png "Rendered by QuickLaTeX.com")

 図2 剛体振り子と同じ周期をもつ単振り子の長さは?
図2 剛体振り子と同じ周期をもつ単振り子の長さは?
 はそれぞれ時刻
はそれぞれ時刻 は時刻
は時刻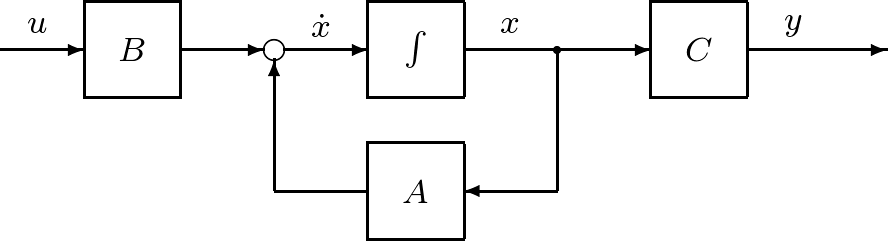 図1 状態空間表現(1)のブロック線図
図1 状態空間表現(1)のブロック線図 図2 マス・バネ・ダンパからなる機械系
図2 マス・バネ・ダンパからなる機械系
 はドアの質量,
はドアの質量, は時刻
は時刻 は時刻
は時刻

 を定義すると
を定義すると
![\displaystyle{(6)\quad \underbrace{ \left[\begin{array}{c} \dot{r}(t) \\ \dot{v}(t) \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\frac{K}{M} & -\frac{D}{M} \end{array}\right] }_A \underbrace{ \left[\begin{array}{c} r(t) \\ v(t) \end{array}\right] }_{x(t)}+ \underbrace{ \left[\begin{array}{c} 0 \\ \frac{1}{M} \end{array}\right] }_B u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0f9eee4a83cd00ce26d47f602e1c5d9a_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(7)\quad x^*= \left[\begin{array}{c} 0 \\ 0 \end{array}\right],\ u^*=0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f4671d16d42c1ab159c18cf6487d5c29_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(8)\quad \underbrace{r(t)}_{y(t)}= \underbrace{ \left[\begin{array}{cc} 1 & 0 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} r(t) \\ v(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e6aa71a57291ccf1f09944a3b8846465_l3.png "Rendered by QuickLaTeX.com")
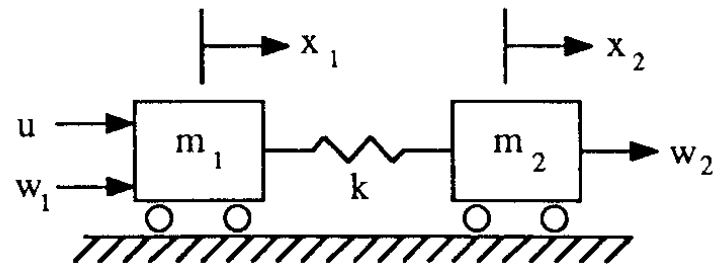

![\displaystyle{(10)\quad \frac{d}{dt}\left[\begin{array}{c} x_1\\ x_2\\ \dot{x}_1\\ \dot{x}_2 \end{array}\right] = \left[\begin{array}{cccc} 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 1\\ a_{31} & a_{32} & a_{33} & a_{34} \\ a_{41} & a_{42} & a_{43} & a_{44} \end{array}\right] \left[\begin{array}{c} x_1\\ x_2\\ \dot{x}_1\\ \dot{x}_2 \end{array}\right] + \left[\begin{array}{ccc} 0 & 0 & 0\\ 0 & 0 & 0\\ b_{31} & b_{32} & b_{33}\\ b_{41} & b_{42} & b_{43} \end{array}\right] \left[\begin{array}{c} u\\ w_1\\ w_2 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-797fe9e960cb81c588217b74e17d70fb_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(2)\quad \boxed{ \underbrace{ \left[\begin{array}{c} \dot{x}_1(t) \\ \dot{x}_2(t) \end{array}\right] }_{\dot x} = \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} x_1(t) \\ x_2(t) \end{array}\right] }_{x} + \underbrace{ \left[\begin{array}{c} 0 \\ K\omega_n^2 \end{array}\right] }_{B} u(t) }}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-04009ed3d0edf5fa5a2060e9508b3422_l3.png "Rendered by QuickLaTeX.com")



 を行うと、次の状態空間表現を得ます。
を行うと、次の状態空間表現を得ます。![\displaystyle{(3)\quad \boxed{\left\{\begin{array}{l} \left[\begin{array}{c} \dot{x}_1(t) \\ \dot{x}_2(t) \end{array}\right]= \left[\begin{array}{cc} A_1 & B_1C_2 \\ 0 & A_2 \end{array}\right] \left[\begin{array}{c} x_1(t) \\ x_2(t) \end{array}\right] + \left[\begin{array}{cc} B_1D_2 \\ B_2 \end{array}\right] u_2(t) \\ y_1(t)= \left[\begin{array}{cc} C_1 & D_1C_2 \end{array}\right] \left[\begin{array}{c} x_1(t) \\ x_2(t) \end{array}\right] +D_1D_2u_2(t) \end{array}\right.} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-36963521878ef7dd0808b96bae3bfff3_l3.png "Rendered by QuickLaTeX.com")

 を新しい状態
を新しい状態 に、正則行列
に、正則行列 を用いた
を用いた





![(4)\quad \begin{array}{l} \displaystyle{x(t)=e^{(a-bf)t}x(0)+\int_0^t e^{(a-bf)(t-\tau)}w\,d\tau}\\ \displaystyle{=e^{(a-bf)t}x(0)+\left[\frac{1}{-(a-bf)}e^{(a-bf)(t-\tau)}w\right]_0^t}\\ \displaystyle{=e^{(a-bf)t}x(0)+\frac{w}{-(a-bf)}(1-e^{(a-bf)t})}\\ \displaystyle{\rightarrow \frac{w}{-(a-bf)}\ne 0 \quad (t\rightarrow\infty)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-87ff2adf2a1f8bd25d390b2196807faa_l3.png "Rendered by QuickLaTeX.com")






![\displaystyle{(11)\quad {\underbrace{ \left[\begin{array}{cc} \dot{x}(t) \\ \dot{x}_I(t) \end{array}\right] }_{\dot{x}_E} = \underbrace{ \left[\begin{array}{cc} a-bf & -bf_I \\ 1 & 0 \end{array}\right] }_{A_{EF}} \underbrace{ \left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] }_{x_E} + \underbrace{ \left[\begin{array}{cc} w \\ 0 \end{array}\right] }_{w_E}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-31b2a3c2e865a17fd4319135d80cb684_l3.png "Rendered by QuickLaTeX.com")
 の特性方程式は
の特性方程式は
 と
と を適切に選んでおきます。
を適切に選んでおきます。
![(14)\quad \begin{array}{l} \displaystyle{x_E(t)=\exp(A_{EF}t)x_E(0)+\int_0^t\exp(A_{EF}(t-\tau))w_E\,d\tau}\\ \displaystyle{=\exp(A_{EF}t)x_E(0)+\left[-\exp(A_{EF}(t-\tau))A_{EF}^{-1}w_E\right]_0^t}\\ \displaystyle{=\exp(A_{EF}t)x_E(0)-(I_2-\exp(A_{EF}t))A_{EF}^{-1}w_E}\\ \displaystyle{=\exp(A_{EF}t)(x_E(0)+A_{EF}^{-1}w_E)-A_{EF}^{-1}w_E}\\ \displaystyle{\rightarrow -A_{EF}^{-1}w_E \quad (t\rightarrow\infty)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3bca83642ec9ba9f633fe5e502d53148_l3.png "Rendered by QuickLaTeX.com")
 のとき、次式が成り立ちます。
のとき、次式が成り立ちます。![(15)\quad \begin{array}{l} \displaystyle{\left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] \rightarrow - \left[\begin{array}{cc} a-bf & -bf_I \\ 1 & 0 \end{array}\right]^{-1} \left[\begin{array}{cc} w \\ 0 \end{array}\right]}\\ \displaystyle{ = -\frac{1}{bf_I} \left[\begin{array}{cc} 0 & bf_I \\ -1 & a-bf \end{array}\right] \left[\begin{array}{cc} w \\ 0 \end{array}\right] = \left[\begin{array}{cc} 0 \\ \frac{1}{bf_I}w \end{array}\right]} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b2e96500c3db9199db1fbc40cbaa0029_l3.png "Rendered by QuickLaTeX.com")


 は目標値)、上述の積分動作を次のように変えてみます。
は目標値)、上述の積分動作を次のように変えてみます。

![\displaystyle{(20)\quad \boxed{\underbrace{ \left[\begin{array}{cc} \dot{x}(t) \\ \dot{x}_I(t) \end{array}\right] }_{\dot{x}_E} = \underbrace{ \left[\begin{array}{cc} a-bf & -bf_I \\ 1 & 0 \end{array}\right] }_{A_{EF}} \underbrace{ \left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] }_{x_E} + \underbrace{ \left[\begin{array}{cc} w \\ -r_c \end{array}\right] }_{w_E}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ddef16b35db1273870bc586e72b3bb5a_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(21)\quad \begin{array}{l} \displaystyle{\left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] \rightarrow - \left[\begin{array}{cc} a-bf & -bf_I \\ 1 & 0 \end{array}\right]^{-1} \left[\begin{array}{cc} w \\ -r_c \end{array}\right]}\\ \displaystyle{= -\frac{1}{bf_I} \left[\begin{array}{cc} 0 & bf_I \\ -1 & a-bf \end{array}\right] \left[\begin{array}{cc} w \\ -r_c \end{array}\right] = \left[\begin{array}{cc} r_c \\ \frac{1}{bf_I}w+\frac{a-bf}{bf_I}r_c \end{array}\right]} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f812ff0b7b34a62587cc56d0da3ad5fd_l3.png "Rendered by QuickLaTeX.com")


 を、図2のように、フィードフォワードしておくことが考えられます。
を、図2のように、フィードフォワードしておくことが考えられます。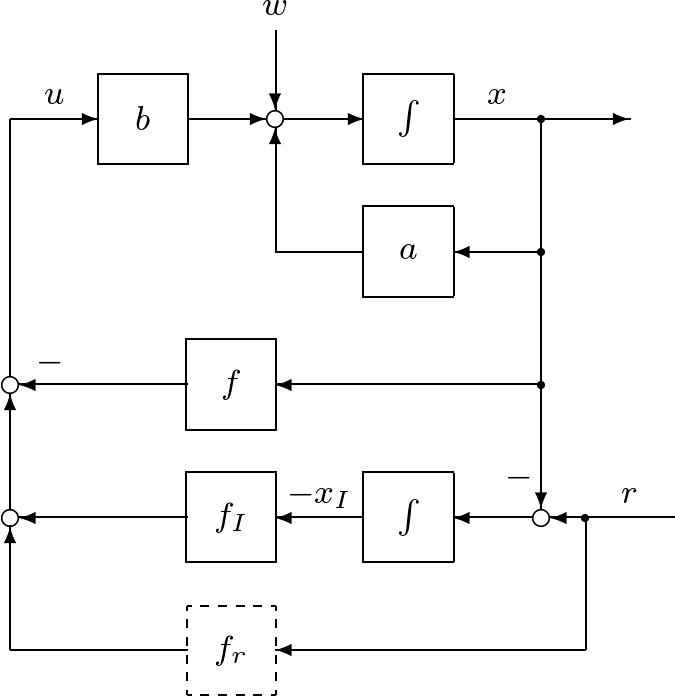
 、
、 、
、 、
、 、
、 、
、 として、次のシミュレーション結果を得ます。
として、次のシミュレーション結果を得ます。 図2 図1のシミュレーション例
図2 図1のシミュレーション例




 を用いて
を用いて

![\displaystyle{(31)\quad \boxed{ \begin{array}{l} \left[\begin{array}{c} \dot{\hat{x}}(t) \\ \dot{x}_I(t) \end{array}\right] = \underbrace{ \left[\begin{array}{cc} a-hc-bf & -bf_I \\ 0 & 0 \end{array}\right] }_{A_K} \left[\begin{array}{c} \hat{x}(t) \\ x_I(t) \end{array}\right] + \underbrace{ \left[\begin{array}{cc} h & 0\\ 1 & -1 \end{array}\right] }_{B_K} \left[\begin{array}{c} y(t) \\ r_c \end{array}\right]\\ u(t)= \underbrace{- \left[\begin{array}{cc} f & f_I \end{array}\right] }_{C_K} \left[\begin{array}{c} \hat{x}(t) \\ x_I(t) \end{array}\right] \end{array}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c9a64fdc6b3c7ee88c4b4ccbe8c58b7b_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(33)\quad \left[\begin{array}{c} \dot{x}(t) \\ \dot{x}_I(t) \\ \dot{\hat{x}}(t) \end{array}\right] = \left[\begin{array}{ccc} a & -bf_I & -bf \\ c & 0 & 0 \\ hc & -bf_I & a-hc-bf \end{array}\right] \left[\begin{array}{c} x(t) \\ x_I(t) \\ \hat{x}(t) \end{array}\right] + \left[\begin{array}{c} w \\ -r_c \\ 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ec175798327a5fc11b68b91a22172f0d_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(34)\quad \left[\begin{array}{c} x(t) \\ x_I(t) \\ e(t) \end{array}\right] = \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 0 \\ -1 & 0 & 1 \end{array}\right] \left[\begin{array}{c} x(t) \\ x_I(t) \\ \hat{x}(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7ca97b463935b7f71dea225ffcb573f2_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(35)\quad \boxed{ \left[\begin{array}{c} \dot{x}(t) \\ \dot{x}_I(t) \\\hline \dot{e}(t) \end{array}\right] = \underbrace{ \left[\begin{array}{cc|c} a-bf & -bf_I & -bf \\ c & 0 & 0 \\\hline 0 & 0 & a-hc \end{array}\right] }_{ A_{EF}'= \left[\begin{array}{c|c} A_{EF} & - \left[\begin{array}{cc} bf \\ 0 \end{array}\right] \\[5mm] \hline 0 & \widehat{a} \end{array}\right] } \left[\begin{array}{c} x(t) \\ x_I(t) \\\hline e(t) \end{array}\right] + \left[\begin{array}{c} w \\ -r_c \\\hline -w \end{array}\right]} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3a0c12a07d48d608c414bfef747b7ae3_l3.png "Rendered by QuickLaTeX.com")
 と
と![\displaystyle{(36)\quad \left[\begin{array}{c} x(t) \\ x_I(t) \\\hline e(t) \end{array}\right] \ \rightarrow\ \underbrace{ \left[\begin{array}{c|c} A_{EF}^{-1} & -A_{EF}^{-1} \left[\begin{array}{cc} bf \\ 0 \end{array}\right] \widehat{a}^{-1} \\[5mm]\hline 0 & \widehat{a}^{-1} \end{array}\right] }_{A_{EF}'\,^{-1}} \left[\begin{array}{c} -w \\ r_c \\\hline w \end{array}\right] \quad (t\rightarrow\infty) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c8709893951656a10a2cf0aec18bef8b_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(37)\quad \begin{array}{l} \displaystyle{\left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] \rightarrow \left[\begin{array}{cc} a-bf & -bf_I \\ c & 0 \end{array}\right]^{-1} \left[\begin{array}{cc} -w-bf\widehat{a}^{-1}w\\ r_c \end{array}\right]}\\ \displaystyle{= \frac{1}{cbf_I} \left[\begin{array}{cc} 0 & bf_I \\ -c & a-bf \end{array}\right] \left[\begin{array}{cc} -w-bf\widehat{a}^{-1}w\\ r_c \end{array}\right]}\\ \displaystyle{= \left[\begin{array}{cc} \frac{1}{c}r_c \\ \frac{1}{bf_I}w+\frac{1}{f_I}f\widehat{a}^{-1}w+\frac{a-bf}{cbf_I}r_c \end{array}\right]} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a0408f31040df6a4e4b055bc9c88bc05_l3.png "Rendered by QuickLaTeX.com")



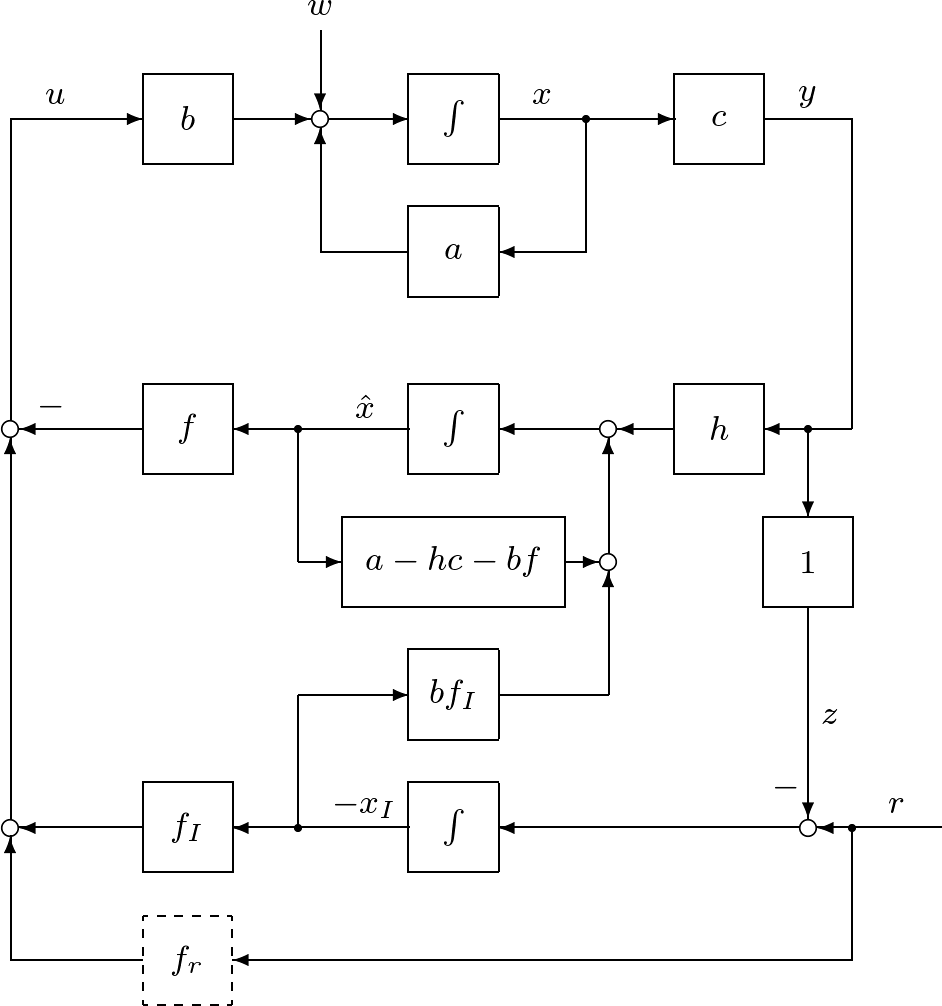 図3 積分動作を加えたオブザーバベースコントローラによる閉ループ系
図3 積分動作を加えたオブザーバベースコントローラによる閉ループ系![\displaystyle{(41)\quad \underbrace{ \left[\begin{array}{cc} \dot{x}(t) \\ \dot{x}_I(t) \end{array}\right] }_{\dot{x}_E(t)} = \underbrace{ \left[\begin{array}{cc} a-bf & -bf_I \\ c & 0 \end{array}\right] }_{A_{EF}} \underbrace{ \left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] }_{x_E(t)} + \underbrace{ \left[\begin{array}{cc} w \\ -r_c \end{array}\right] }_{w_E} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f729fc6c953923d57572c53768579876_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(43)\quad \underbrace{ \left[\begin{array}{cc} qx(t)\\ ru(t) \end{array}\right] }_{y_{E}(t)} = \underbrace{ \left[\begin{array}{cc} q & 0 \\ -rf & -rf_I \end{array}\right] }_{C_{E}} \underbrace{ \left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] }_{x_{E}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0d18a388e7b6c8f9fa04453e84d71145_l3.png "Rendered by QuickLaTeX.com")



 に、平衡入力(
に、平衡入力( に変わっていることに注意し、これとの差を表す状態方程式を考えます。まず定値外乱抑制前の状態方程式は(1)と(2)を合わせて
に変わっていることに注意し、これとの差を表す状態方程式を考えます。まず定値外乱抑制前の状態方程式は(1)と(2)を合わせて![\displaystyle{(47)\quad \underbrace{\frac{d}{dt} \left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] }_{\dot{x}_E(t)} = \underbrace{ \left[\begin{array}{cc} a & 0 \\ c & 0 \end{array}\right] }_{A_E} \underbrace{ \left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] }_{x_E(t)} + \underbrace{ \left[\begin{array}{cc} b \\ 0 \end{array}\right] }_{B_E} u(t) + \underbrace{ \left[\begin{array}{cc} w \\ -r_c \end{array}\right] }_{w_E} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4e152ba9118c145fdc3aa9097ad1291f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(48)\quad \underbrace{\frac{d}{dt} \left[\begin{array}{cc} x_\infty \\ x_{I\infty} \end{array}\right] }_{\dot{x}_{E\infty}=0} = \underbrace{ \left[\begin{array}{cc} a & 0 \\ c & 0 \end{array}\right] }_{A_E} \underbrace{ \left[\begin{array}{cc} x_\infty \\ x_{I\infty} \end{array}\right] }_{x_{E\infty}} + \underbrace{ \left[\begin{array}{cc} b \\ 0 \end{array}\right] }_{B_E} u_\infty + \underbrace{ \left[\begin{array}{cc} w \\ -r_c \end{array}\right] }_{w_E} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-388e3b63a548f6ae3de1bca82350d6b8_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(49)\quad \boxed{ \underbrace{\frac{d}{dt} \left[\begin{array}{cc} x(t)-x_\infty \\ x_I(t)-x_{I\infty} \end{array}\right] }_{\dot{x}_{E1}(t)} = \underbrace{ \left[\begin{array}{cc} a & 0 \\ c & 0 \end{array}\right] }_{A_{E1}} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ x_I(t)-x_{I\infty} \end{array}\right] }_{x_{E1}(t)} + \underbrace{ \left[\begin{array}{cc} b \\ 0 \end{array}\right] }_{B_{E1}} \underbrace{(u(t)-u_\infty)}_{u_{E1}(t)}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ef61060eeffd371eb2eb609612504541_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(50)\quad \underbrace{u(t)-u_\infty}_{u_{E1}(t)} =- \underbrace{ \left[\begin{array}{cc} f & f_I \end{array}\right] }_{F_E} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ x_I(t)-x_{I\infty} \end{array}\right] }_{x_{E1}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2de715ba671f8a4ff5fe87b581f7486f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(51)\quad \underbrace{\frac{d}{dt} \left[\begin{array}{cc} x(t)-x_\infty \\ x_I(t)-x_{I\infty} \end{array}\right] }_{\dot{x}_{E1}(t)} = \underbrace{ \left[\begin{array}{cc} a-bf & -bf_I \\ c & 0 \end{array}\right] }_{A_{EF}} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ x_I(t)-x_{I\infty} \end{array}\right] }_{x_{E1}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0ac4b58fae5895656374987e2e2dfb53_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(52)\quad \underbrace{ \left[\begin{array}{cc} q(x(t)-x_\infty) \\ r(u(t)-u_\infty) \end{array}\right] }_{y_{E1}(t)} = \underbrace{ \left[\begin{array}{cc} q & 0 \\ -rf & -rf_I \end{array}\right] }_{C_{E1}} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ x_I(t)-x_{I\infty} \end{array}\right] }_{x_{E1}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f6ff94e985ffd90ab5da603d6e28d94f_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(54)\quad \boxed{ \underbrace{\frac{d}{dt} \left[\begin{array}{cc} \dot{x}(t) \\ x(t)-r_c \end{array}\right] }_{\dot{x}_{E2}(t)} = \underbrace{ \left[\begin{array}{cc} a & 0 \\ c & 0 \end{array}\right] }_{A_{E2}} \underbrace{ \left[\begin{array}{cc} \dot{x}(t) \\ x(t)-r_c \end{array}\right] }_{x_{E2}(t)} + \underbrace{ \left[\begin{array}{cc} b \\ 0 \end{array}\right] }_{B_{E2}} \underbrace{\dot{u}(t)}_{u_{E2}(t)}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d55bc528b4211e44104d9a016f1efe77_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(55)\quad \left[\begin{array}{cc} \dot{x}(t) \\ x(t)-r_c \end{array}\right] = \underbrace{ \left[\begin{array}{cc} a & b \\ c & 0 \end{array}\right] }_{S} \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b36ebc36ec3a8aa2b181e54a374490a4_l3.png "Rendered by QuickLaTeX.com")
![(56)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{cc} a & b \\ c & 0 \end{array}\right] }_{S} \frac{d}{dt} \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right]=\\ \underbrace{ \left[\begin{array}{cc} a & 0 \\ 1 & 0 \end{array}\right] }_{A_{E2}} \underbrace{ \left[\begin{array}{cc} a & b \\ c & 0 \end{array}\right] }_{S} \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] + \underbrace{ \left[\begin{array}{cc} b \\ 0 \end{array}\right] }_{B_{E2}} \underbrace{\dot{u}(t)}_{u_{E2}(t)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3fe9bb9955ebd8e2c8e93bbd706c8fe9_l3.png "Rendered by QuickLaTeX.com")
 をかけると3つめの偏差系E3
をかけると3つめの偏差系E3![\displaystyle{(57)\quad \boxed{\underbrace{ \frac{d}{dt} \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{\dot{x}_{E3}} = \underbrace{ \left[\begin{array}{cc} a & b \\ 0 & 0 \end{array}\right] }_{A_{E3}} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{x_{E3}} + \underbrace{ \left[\begin{array}{cc} 0 \\ 1 \end{array}\right] }_{B_{E3}} \underbrace{\dot{u}(t)}_{u_{E3}(t)}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c85ae085cc84c481ab12fad21f3f8ae0_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(58)\quad \underbrace{\dot{u}(t)}_{u_{E3}(t)} =- \underbrace{ \left[\begin{array}{cc} k & k_I \end{array}\right] }_{K_E} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{x_{E3}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b8ffb28df7a25dd49c60692720881d34_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(59)\quad \underbrace{\frac{d}{dt} \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{\dot{x}_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} a & b \\ -k & -k_I \end{array}\right] }_{A_{EK}} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{x_{E3}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-150f484db41dfcfd7bc2713f40cf1398_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(60)\quad \underbrace{ \left[\begin{array}{cc} q(x(t)-x_\infty) \\ r\dot{u}(t) \end{array}\right] }_{y_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} q & 0 \\ 0 & r\frac{d}{dt} \end{array}\right] }_{C_{E3}} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{x_{E3}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-36376901e37df555679c68adbb340194_l3.png "Rendered by QuickLaTeX.com")

 と
と を決めます。(55)を(59)に代入して
を決めます。(55)を(59)に代入して![\displaystyle{(62)\quad \dot{u}(t) =- \underbrace{ \left[\begin{array}{cc} k & k_I \end{array}\right] }_{K_E} \underbrace{ \left[\begin{array}{cc} a & b \\ 1 & 0 \end{array}\right]^{-1} }_{S^{-1}} \left[\begin{array}{cc} \dot{x}(t) \\ x(t)-r_c \end{array}\right] =- \underbrace{ \left[\begin{array}{cc} f & f_I \end{array}\right] }_{F_E=K_ES^{-1}} \left[\begin{array}{cc} \dot{x}(t) \\ x(t)-r_c \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-84e71c3cc59f8a7feeedd162fdda01c6_l3.png "Rendered by QuickLaTeX.com")



![\displaystyle{(64)\quad \frac{d}{dt} %\underbrace{ \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] %}_{{\tilde x}_E(t)-{\tilde x}_{E\infty}} = \underbrace{ \left[\begin{array}{cc} a & b \\ 0 & 0 \end{array}\right] }_{A_{E}} %\underbrace{ \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] %}_{{\tilde x}_E(t)-{\tilde x}_{E\infty}} + \underbrace{ \left[\begin{array}{c} 0 \\ 1 \end{array}\right] }_{B_{E}} {\dot u}(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0c41509ad03419a701e8ac16d5e5fdd9_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(65)\quad {\dot u}(t)=- \left[\begin{array}{cc} k & k_I \end{array}\right] \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e386ce8fe6431632be33d291ba81684c_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(67)\quad \left[\begin{array}{cc} f & f_I \end{array}\right] = \left[\begin{array}{cc} k & k_I \end{array}\right] \left[\begin{array}{cc} a & b \\ c & 0 \end{array}\right]^{-1} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ee8e3f8eae5af6b084a763df95a171f7_l3.png "Rendered by QuickLaTeX.com")

 を求め,
を求め,
![\displaystyle{(70)\quad \begin{array}{l} \dot{x}_K(t)=A_Kx_K(t)+B_K \left[\begin{array}{c} y(t) \\ r_c \end{array}\right]\\ u(t)=C_Kx_K(t) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a49a6c693b0b6603def7809f250eda5e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(71)\quad \begin{array}{l} A_K= \left[\begin{array}{cc} a-hc-bf & -bf_I \\ 0 & 0 \end{array}\right]\\ B_K= \left[\begin{array}{cc} h & 0\\ 1 & -1 \end{array}\right]\\ C_K=- \left[\begin{array}{cc} f & f_I \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-78a0c63e2aa625650bb1f5593550221b_l3.png "Rendered by QuickLaTeX.com")


 を満たすものを選びます。(2)を(1)に代入して、次式を得ます。
を満たすものを選びます。(2)を(1)に代入して、次式を得ます。
 )、状態フィードバックを行って閉ループ系を漸近安定(
)、状態フィードバックを行って閉ループ系を漸近安定( )にできることです。そのようなゲイン
)にできることです。そのようなゲイン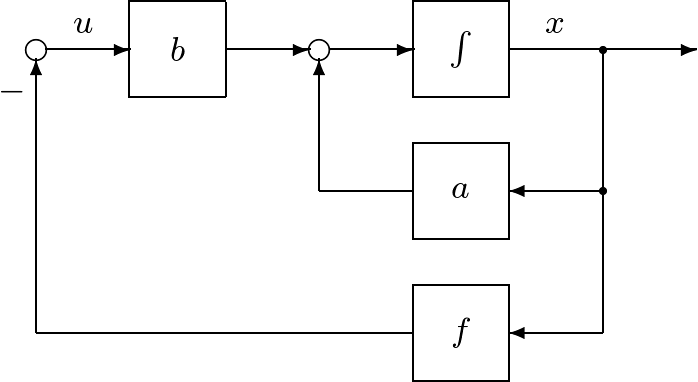 図1 状態フィードバックによる閉ループ系
図1 状態フィードバックによる閉ループ系

![(6)\quad \begin{array}{lll} \displaystyle{J_x=\int_0^\infty q^2x^2(t)\,dt}\\ \displaystyle{=\int_0^\infty q^2e^{2(a-bf)t}x^2(0)\,dt}\\ \displaystyle{=q^2x^2(0)\left[\frac{1}{2(a-bf)}e^{2(a-bf)t}\right]_0^\infty}\\ \displaystyle{=\frac{q^2x^2(0)}{2(a-bf)}\left[\underbrace{e^{2(a-bf)\infty}}_{0}-\underbrace{e^{2(a-bf)0}}_{1}\right]}\\ \displaystyle{=-\frac{q^2}{2(a-bf)}x^2(0)>0\quad (a-bf<0)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ccbd56eae6c871c4d509a66bb0b1d13c_l3.png "Rendered by QuickLaTeX.com")
 はいくらでも小さくできることが分かります。
はいくらでも小さくできることが分かります。 は次式で与えられます。
は次式で与えられます。
![(8)\quad \begin{array}{lll} \displaystyle{J_u=\int_0^\infty r^2u^2(t)\,dt}\\ \displaystyle{=\int_0^\infty r^2f^2e^{2(a-bf)t}x^2(0)\,dt}\\ \displaystyle{=r^2f^2x^2(0)\left[\frac{1}{2(a-bf)}e^{2(a-bf)t}\right]_0^\infty}\\ \displaystyle{=-\frac{r^2f^2}{2(a-bf)}x^2(0)>0\quad (a-bf<0)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9f5dcb6b69a84056f569669f6625e961_l3.png "Rendered by QuickLaTeX.com")
 が下に凸で、
が下に凸で、  において最小値を取ることは、次式から分かります。
において最小値を取ることは、次式から分かります。

 として、
として、 の場合について、
の場合について、 の外形を描くと、次図のようになります。ここで、
の外形を描くと、次図のようになります。ここで、
 の最小化と等価です。
の最小化と等価です。
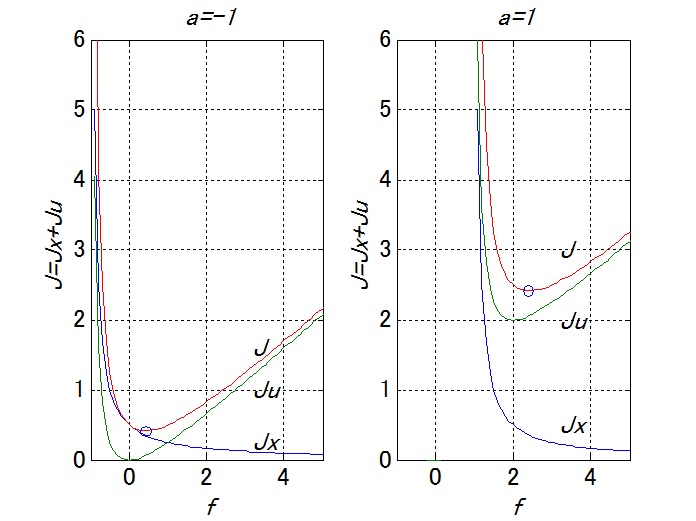 図2 評価関数の概形
図2 評価関数の概形



 は物理量の2乗和になっていますので、予め代表時間と代表長さによる無次元化を行っておく必要があります。たとえば、状態変数と入力変数がとりうる範囲を想定して
は物理量の2乗和になっていますので、予め代表時間と代表長さによる無次元化を行っておく必要があります。たとえば、状態変数と入力変数がとりうる範囲を想定して

 の場合を考えると
の場合を考えると
 で、これが大きいほど時定数
で、これが大きいほど時定数 を導入して重み係数を次のように設定します。
を導入して重み係数を次のように設定します。
 は固定されますので、設計パラメータは
は固定されますので、設計パラメータは 、
、 、
、 として、設計パラメータを
として、設計パラメータを と変えてみると、次の応答を得ます。
と変えてみると、次の応答を得ます。 図3 重み係数の比
図3 重み係数の比 による応答の変化
による応答の変化![\displaystyle{(21)\quad M=\left[\begin{array}{cc} a & -r^{-2}b^2 \\ -q^2 & -a \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-36ba3bbca3aa8b30edda524ce3262be9_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(23)\quad \left[\begin{array}{cc} v_1 \\ v_2 \end{array}\right] =\left[\begin{array}{cc} 1 \\ \frac{-a-\sqrt{a^2+r^{-2}b^2q^2}}{-r^{-2}b^2} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-818b80fae6a9d75606e700bc7229ad17_l3.png "Rendered by QuickLaTeX.com")




 でない限り
でない限り
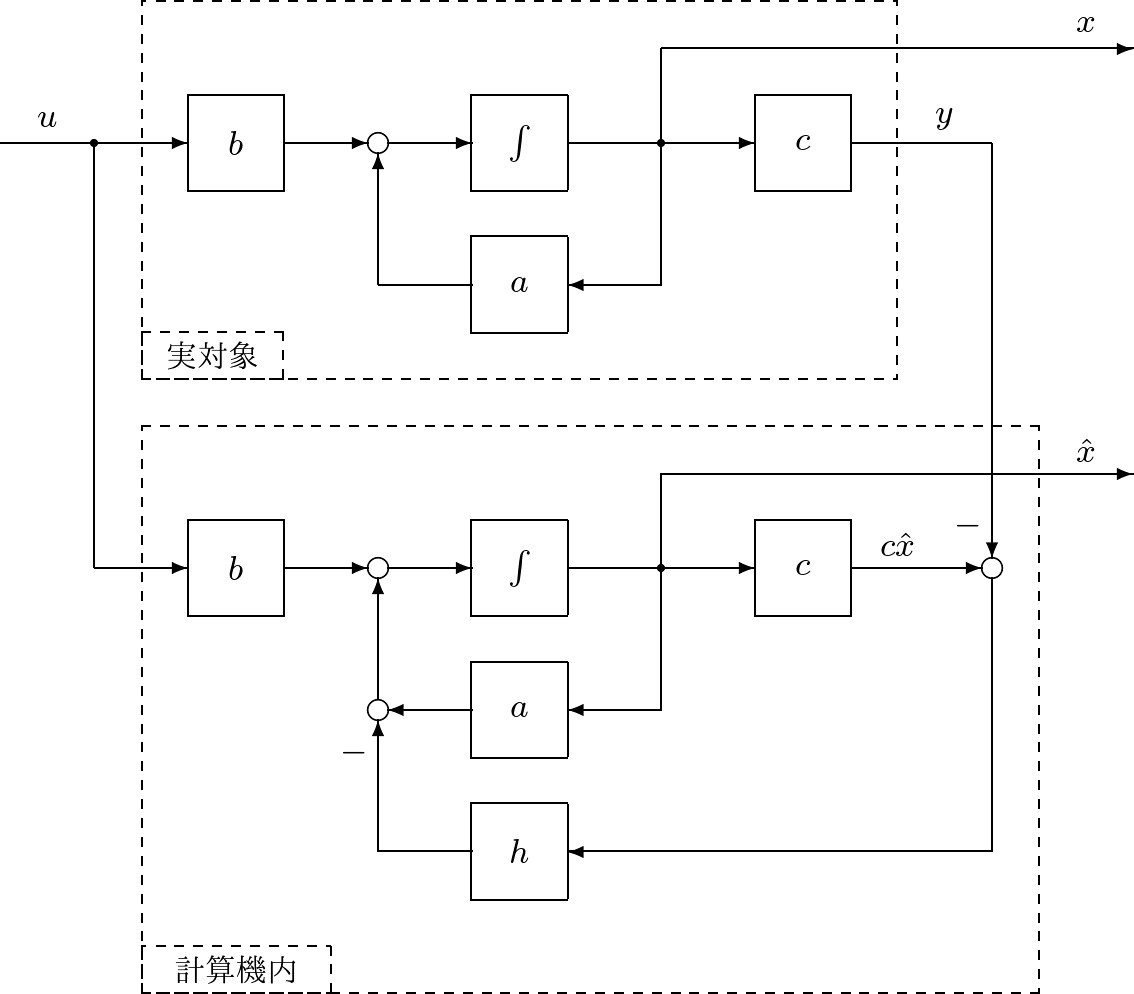 図4 状態オブザーバの考え方
図4 状態オブザーバの考え方


 であるとすると
であるとすると
 は、制御対象の状態
は、制御対象の状態 を漸近的に推定することができます。このとき
を漸近的に推定することができます。このとき


![\displaystyle{(36)\quad \left[\begin{array}{cc} \dot{x}(t)\\ \dot{\hat{x}}(t) \end{array}\right]= \underbrace{ \left[\begin{array}{cc} a& -bf\\ hc& a-hc-bf \end{array}\right] }_{A_F} \left[\begin{array}{cc} x(t)\\ \hat{x}(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bd0bda91887ef926493669aa7866308d_l3.png "Rendered by QuickLaTeX.com")
 とおくと、状態変数を変更した閉ループ系の状態方程式として、次式を得ます。
とおくと、状態変数を変更した閉ループ系の状態方程式として、次式を得ます。![\displaystyle{(37)\quad \boxed{ \left[\begin{array}{cc} \dot{x}(t)\\ \dot{e}(t) \end{array}\right]= \underbrace{ \left[\begin{array}{cc} a-bf & -bf\\ 0 & a-hc \end{array}\right] }_{A_F'} \left[\begin{array}{cc} x(t)\\ e(t) \end{array}\right]} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-36b6d2d539455492f72a79c84bbd9dfe_l3.png "Rendered by QuickLaTeX.com")


 に代入して
に代入して

 と
と は共に負となるように
は共に負となるように
 に対する状態フィードバック
に対する状態フィードバック と,状態オブザーバ
と,状態オブザーバ (
( )を考える。状態オブザーバによって推定された状態を用いる状態フィードバック
)を考える。状態オブザーバによって推定された状態を用いる状態フィードバック による閉ループ系の状態方程式を求めよ。
による閉ループ系の状態方程式を求めよ。 ,
, (
( )となるように,
)となるように, と
と をどう対応させたか,およびその理由を述べよ。
をどう対応させたか,およびその理由を述べよ。
![\displaystyle{(44)\quad \underbrace{ \left[\begin{array}{cc} \dot{x}(t)\\ \dot{e}(t) \end{array}\right] }_{\dot{x}_{CL}(t)} = \underbrace{ \left[\begin{array}{cc} a-bf & -bf\\ 0 & a-hc \end{array}\right] }_{A_{CL}} \underbrace{ \left[\begin{array}{cc} x(t) \\ e(t) \end{array}\right] }_{x_{CL}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-18643919f74aadae99e3d8cd8e1b5bdb_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(45)\quad \underbrace{ \left[\begin{array}{cc} qx(t)\\ ru(t) \end{array}\right] }_{y_{CL}(t)} = \underbrace{ \left[\begin{array}{cc} q & 0 \\ -rf & -rf \end{array}\right] }_{C_{CL}} \underbrace{ \left[\begin{array}{cc} x(t) \\ e(t) \end{array}\right] }_{x_{CL}(t)} \label{eq7.2.5}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-684ce689df1ece17dac2a773360c137d_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(48)\quad x_{CL}(0)= \left[\begin{array}{cc} x(0)\\ e(0) \end{array}\right]= \left[\begin{array}{cc} x(0)\\ \hat{x}(0)-x(0) \end{array}\right] \label{eq7.2.9}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6af8920d912cba1d035a781d6e959640_l3.png "Rendered by QuickLaTeX.com")

 と
と はそれぞれシステムノイズと観測ノイズとよばれ、定常正規確率過程として扱うのが普通です。特に、
はそれぞれシステムノイズと観測ノイズとよばれ、定常正規確率過程として扱うのが普通です。特に、 と
と は分散を表しています。ここでは確率的な議論を避けるため、
は分散を表しています。ここでは確率的な議論を避けるため、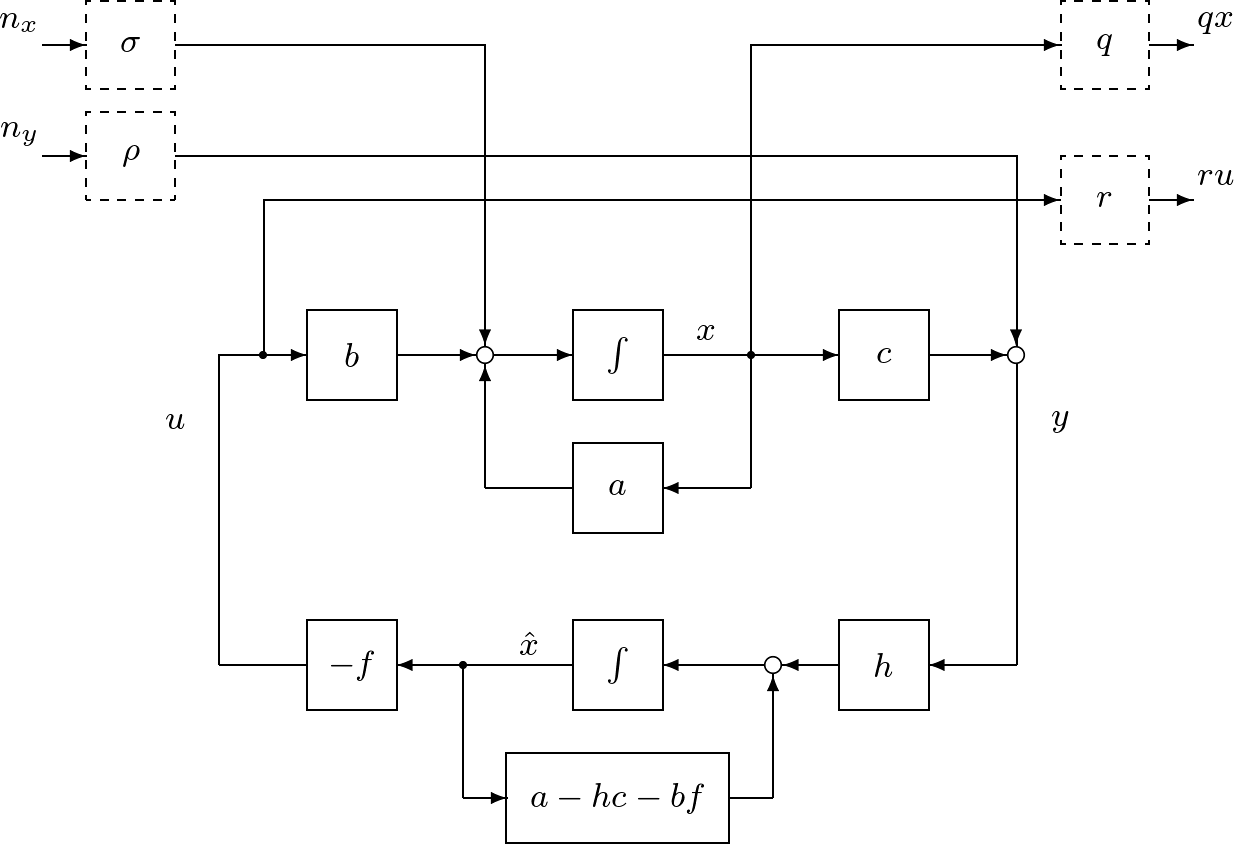
![\displaystyle{(50)\quad &&\left[\begin{array}{cc} \dot{x}(t)\\ \dot{e}(t) \end{array}\right]= \underbrace{ \left[\begin{array}{cc} a-bf & -bf \\ 0 & a-hc \end{array}\right] }_{A_{CL}} \left[\begin{array}{cc} x(t)\\ e(t) \end{array}\right]\nonumber\\ &&+ \underbrace{ \left[\begin{array}{cc} \sigma & 0\\ -\sigma & h\rho \end{array}\right] }_{B_{CL}} \left[\begin{array}{cc} n_x(t)\\ n_y(t) \end{array}\right] \label{eq7.2.11}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3dae61b87dbc3a1048d873c29e860e77_l3.png "Rendered by QuickLaTeX.com")
 に与える場合と
に与える場合と に与える場合の2通り
に与える場合の2通り![\displaystyle{(51)\quad y^{(1)}_{CL}(t) = C_{CL}\exp(A_{CL}t) \underbrace{ \left[\begin{array}{cc} \sigma \\ -\sigma \end{array}\right] }_{x_{CL}(0)=B^{(1)}_{CL}} \label{eq7.2.12}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6d85ddaaacfba1399baf629b17e45713_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(52)\quad y^{(2)}_{CL}(t) = C_{CL}\exp(A_{CL}t) \underbrace{ \left[\begin{array}{cc} 0 \\ h\rho \end{array}\right] }_{x_{CL}(0)=B^{(2)}_{CL}} \label{eq7.2.13}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d2090f3554280d4f6ace06c772a5f0c6_l3.png "Rendered by QuickLaTeX.com")

![\Pi= \left[\begin{array}{cc} \pi_1 & \pi_3 \\ \pi_3 & \pi_2 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b9186e507dec8f157d9372f455bb6a31_l3.png "Rendered by QuickLaTeX.com") とおくと
とおくと
 を直接計算することは容易ではないのですが、
を直接計算することは容易ではないのですが、 が安定行列であることは,
が安定行列であることは,![\displaystyle{(55)\quad \begin{array}{lll} && \underbrace{ \left[\begin{array}{cc} \pi_1 & \pi_3 \\ \pi_3 & \pi_2 \end{array}\right] }_{\Pi} \underbrace{ \left[\begin{array}{cc} a-bf & -bf \\ 0 & a-hc \end{array}\right] }_{A_{CL}}\nonumber\\ &&+ \underbrace{ \left[\begin{array}{cc} a-bf & 0 \\ -bf & a-hc \end{array}\right] }_{A_{CL}^T} \underbrace{ \left[\begin{array}{cc} \pi_1 & \pi_3 \\ \pi_3 & \pi_2 \end{array}\right] }_{\Pi}\nonumber\\ &&+ \underbrace{ \left[\begin{array}{cc} q^2+r^2f^2 & r^2f^2 \\ r^2f^2 & r^2f^2 \end{array}\right] }_{C_{CL}^TC_{CL}>0} = \left[\begin{array}{cc} 0 & 0 \\ 0 & 0 \end{array}\right] \end{array} \label{eq7.2.16}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-79305e587239433bbc038b894b5d433c_l3.png "Rendered by QuickLaTeX.com")



 を求めれば,評価関数は
を求めれば,評価関数は
 としたものであることに注意します。いま,
としたものであることに注意します。いま, かつ
かつ という場合を考えてみると,(50)の第2行目より
という場合を考えてみると,(50)の第2行目より
 は存在しないので,評価関数(59)は第1項だけとなり,これを最小化する
は存在しないので,評価関数(59)は第1項だけとなり,これを最小化する
 を用いて次のように与えられます。
を用いて次のように与えられます。
 ,
, を得ます。このとき,式(58)は
を得ます。このとき,式(58)は
 が求まります。したがって,評価関数(59)は
が求まります。したがって,評価関数(59)は


 を求め,
を求め,




 、
、 、
、 、
、 、
、 、
、 として、状態フィードバックだけとオブザーバベース コントローラを用いた場合とを比較してみると、次の応答を得ます。
として、状態フィードバックだけとオブザーバベース コントローラを用いた場合とを比較してみると、次の応答を得ます。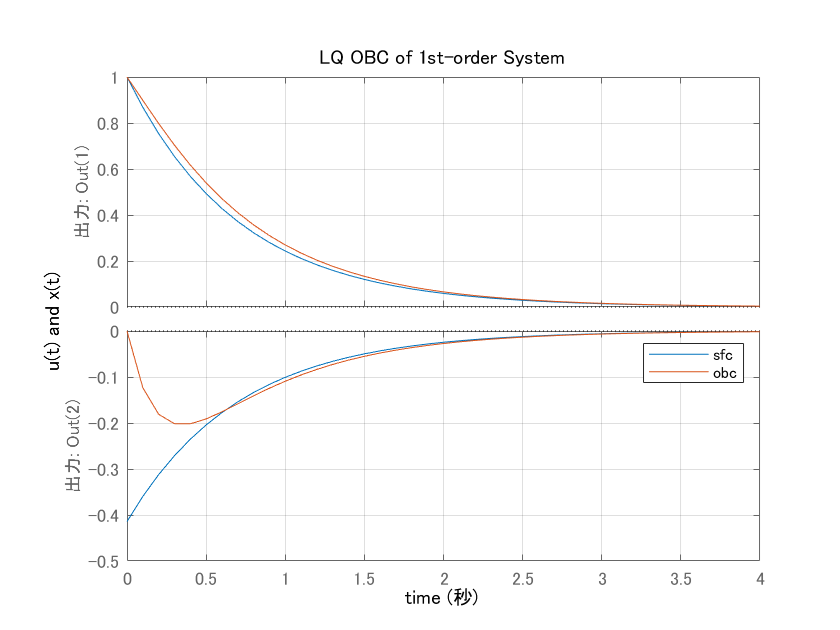 図6 状態フィードバックとオブザーバベース コントローラを用いた場合の応答の変化
図6 状態フィードバックとオブザーバベース コントローラを用いた場合の応答の変化 となっていることを確かめよ。
となっていることを確かめよ。 をラグランジュの未定定数として
をラグランジュの未定定数として




 を第3式に代入して
を第3式に代入して


 は
は




 、
、 について
について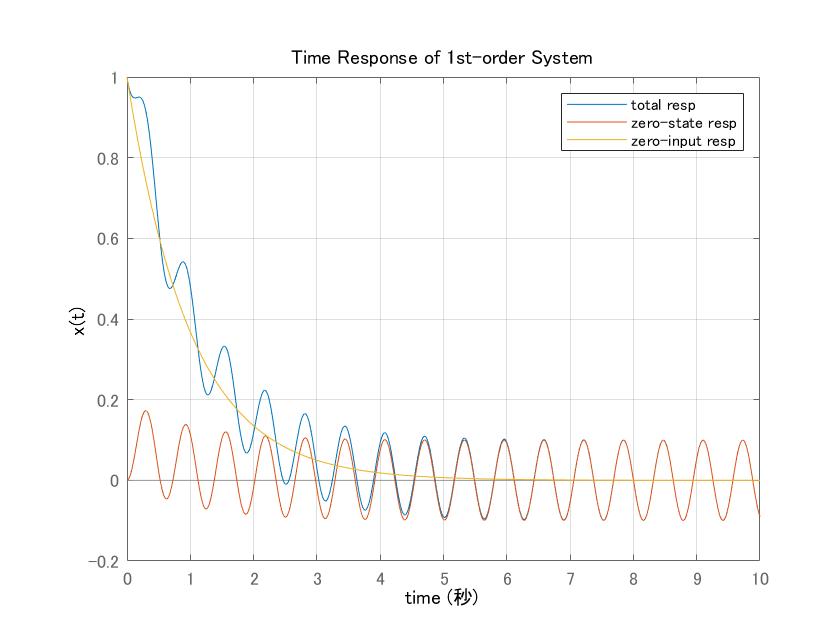
 )
)


 を表していますが、
を表していますが、
 であることを示しています。図2の左図で
であることを示しています。図2の左図で
 )にある場合、インパルス応答さえ分かれば、畳み込み積分を行って出力(零状態応答)が計算できます。この意味で、インパルス応答は重要なのです。また、インパルス応答自体の計算は、
)にある場合、インパルス応答さえ分かれば、畳み込み積分を行って出力(零状態応答)が計算できます。この意味で、インパルス応答は重要なのです。また、インパルス応答自体の計算は、 としたときの零入力応答を求めて行います。ステップ応答が分かれば、これを微分してインパルス応答が分かります。また、インパルス応答をラプラス変換したものが、正弦波応答と密接に関係しています。このことはあとで詳しく述べます。
としたときの零入力応答を求めて行います。ステップ応答が分かれば、これを微分してインパルス応答が分かります。また、インパルス応答をラプラス変換したものが、正弦波応答と密接に関係しています。このことはあとで詳しく述べます。 はそれぞれ時定数、定常ゲインと呼ばれます。
はそれぞれ時定数、定常ゲインと呼ばれます。

![\displaystyle{(11)\quad y(t)=\frac{K}{T}\int_0^te^{-\frac{1}{T}\tau}d\tau=\frac{K}{T}\left[\frac{e^{-\frac{1}{T}\tau}}{-\frac{1}{T}}\right]_0^t =-K(e^{-\frac{1}{T}t}-1)=K(1-e^{-\frac{1}{T}t}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7bfde10f7b48435b229585a7aded9380_l3.png "Rendered by QuickLaTeX.com")

 のときは
のときは

 となります。この時定数
となります。この時定数 、
、 について、ステップ応答
について、ステップ応答 であることが分かります。
であることが分かります。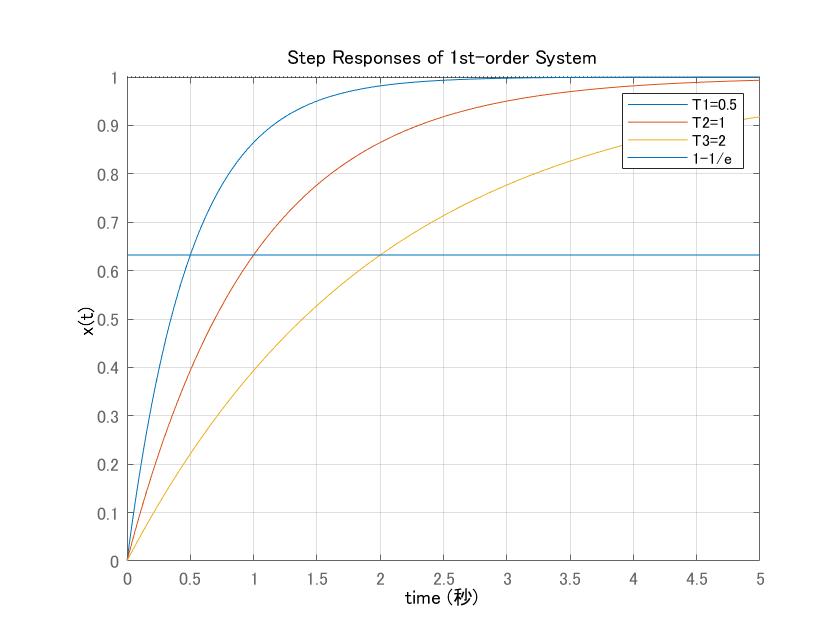




 となります。この時定数
となります。この時定数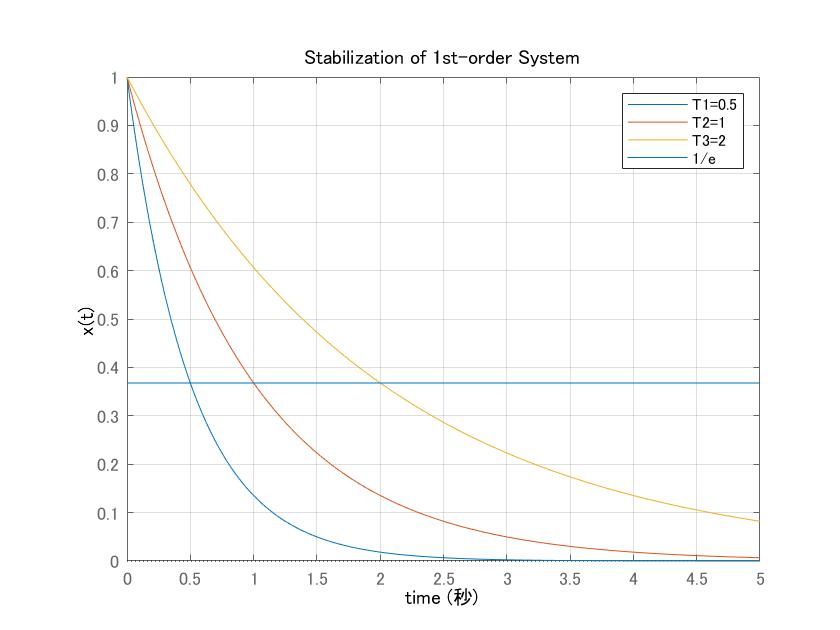



 に
に を代入した
を代入した を周波数伝達関数と呼び、正弦波入力に対する時間応答、すなわち周波数応答を特徴づけることができます。
を周波数伝達関数と呼び、正弦波入力に対する時間応答、すなわち周波数応答を特徴づけることができます。







 の絶対値と偏角となっています。
の絶対値と偏角となっています。 をゲイン、
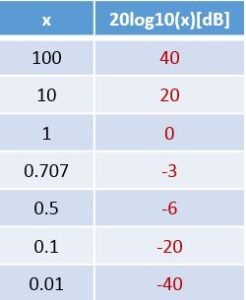
をゲイン、 を位相と呼びます。このゲイン線図と位相線図をペアにして片対数グラフにプロットしたものをボード線図と呼びます。ゲインはdb値(
を位相と呼びます。このゲイン線図と位相線図をペアにして片対数グラフにプロットしたものをボード線図と呼びます。ゲインはdb値( )、位相はdeg値(
)、位相はdeg値( )です。
)です。

 は
は
 であることが確かめられます。
であることが確かめられます。


 をかけると
をかけると

 を定数として
を定数として
 に等しいので
に等しいので


 まで積分して
まで積分して![\displaystyle{(10)\quad \left[e^{-at}x(t)\right]_0^{t'}=\int_0^{t'}e^{-at}bu(t)dt}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-896188914b1e908933f3cf86fd852d95_l3.png "Rendered by QuickLaTeX.com")


 に、
に、


![(4)\quad \begin{array}{l} \displaystyle{x(t)=\int_0^te^{a(t-\tau)}b \sin\omega\tau\,d\tau=e^{at}b\int_0^te^{-a\tau} \sin\omega\tau\,d\tau}\\ \displaystyle{=e^{at}b\left[\frac{e^{-a\tau}}{a^2+\omega^2}(-a\sin\omega\tau-\omega\cos\omega\tau)\right]_0^t}\\ \displaystyle{=\frac{e^{at}b}{a^2+\omega^2}(e^{-at}(-a\sin\omega t-\omega\cos\omega t)+\omega)}\\ \displaystyle{=\frac{b}{\sqrt{a^2+\omega^2}}(\sin\omega t\frac{-a}{\sqrt{a^2+\omega^2}}-\cos\omega t\frac{\omega}{\sqrt{a^2+\omega^2}}+e^{+at}\frac{\omega}{\sqrt{a^2+\omega^2}})}\\ \displaystyle{=\frac{b}{\sqrt{a^2+\omega^2}}(\sin\omega t\cos\theta-\cos\omega t\sin\theta+e^{+at}\sin\theta)}\\ \displaystyle{=\frac{b}{\sqrt{a^2+\omega^2}}(\sin(\omega t-\theta)+e^{+at}\sin\theta)\quad (\theta=\tan^{-1}\frac{\omega}{-a})}\\ \displaystyle{=\frac{b}{\sqrt{a^2+\omega^2}}(\sin(\omega t+\phi)-e^{+at}\sin\phi)\quad (\phi=-\theta)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ed887e5a02609da72f9c770b930e0a48_l3.png "Rendered by QuickLaTeX.com")



 は実数の集合を表します。以下では状態空間表現(1)を簡単に1次系と参照します。
は実数の集合を表します。以下では状態空間表現(1)を簡単に1次系と参照します。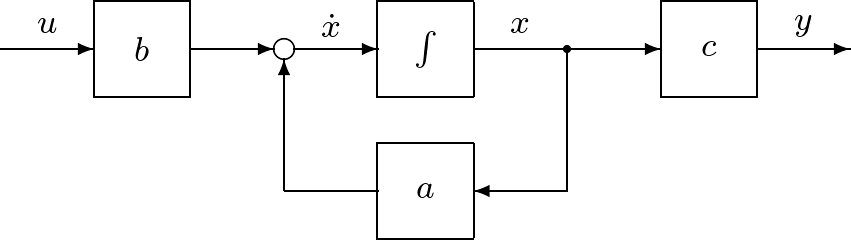

 、車に働く外力(制動力)を
、車に働く外力(制動力)を  とすると、車の運動方程式は次の微分方程式で与えられます。
とすると、車の運動方程式は次の微分方程式で与えられます。
 は車の加速度を表します。もし空気による抗力
は車の加速度を表します。もし空気による抗力 を考慮する場合は、車の運動方程式は次式となります。
を考慮する場合は、車の運動方程式は次式となります。
 で等速運動をしているとします。このとき加速度は零となるので
で等速運動をしているとします。このとき加速度は零となるので
 が定まります。実際には、この等速運動が何らかの原因により乱されたとき、これを速やかに元に戻すことが要求されます。そこで(3)から(4)を辺々引き算すると次式を得ます。
が定まります。実際には、この等速運動が何らかの原因により乱されたとき、これを速やかに元に戻すことが要求されます。そこで(3)から(4)を辺々引き算すると次式を得ます。
 を表していることに留意します。
を表していることに留意します。 )。いま平衡状態が乱され、時刻
)。いま平衡状態が乱され、時刻 となったとします。特に制動力を変えないとすると
となったとします。特に制動力を変えないとすると



 となり、特に制動力を変えないとすると
となり、特に制動力を変えないとすると
 が速度の増減によって、逆方向に働くからといえます。速度に比例する抗力を減衰力、位置に比例する抗力を復元力といいます。モノつくりにおいて、これらを内在させることをパッシブ制御、コントローラ(補償器)を用いて補うことアクティブ制御といいます。
が速度の増減によって、逆方向に働くからといえます。速度に比例する抗力を減衰力、位置に比例する抗力を復元力といいます。モノつくりにおいて、これらを内在させることをパッシブ制御、コントローラ(補償器)を用いて補うことアクティブ制御といいます。 に基づいて行うのか説明せよ。
に基づいて行うのか説明せよ。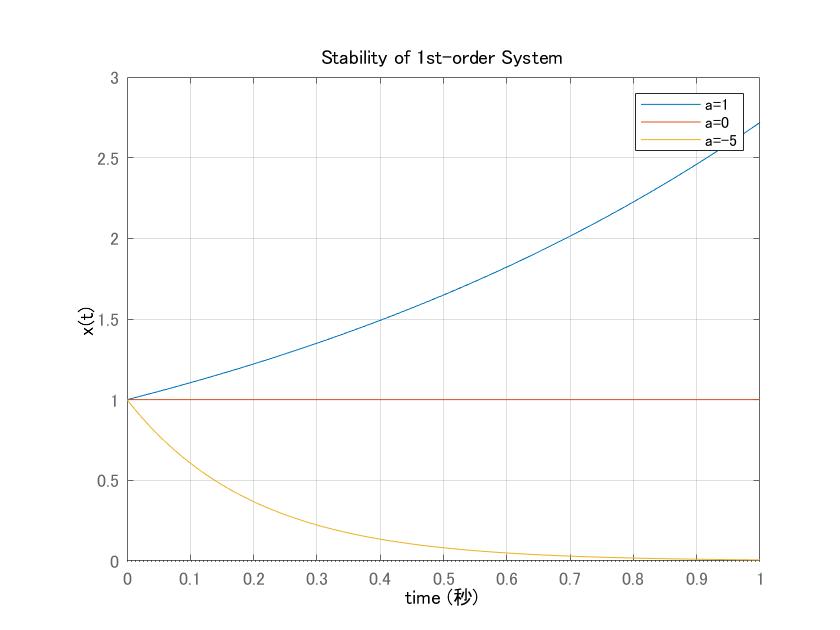 図3 どのグラフが漸近安定であるか?
図3 どのグラフが漸近安定であるか?

![\displaystyle{ q(\tau)= \left[\begin{array}{c} q_1(\tau) \\ \vdots\\ q_N(\tau) \\ \end{array}\right],\ \phi(\xi)= \left[\begin{array}{c} \phi_1(\xi) \\ \vdots\\ \phi_N(\xi) \\ \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-eb7bf57075a262c97b517d94def84c2e_l3.png "Rendered by QuickLaTeX.com")







![\displaystyle{ p(\tau)= \left[\begin{array}{c} p_1(\tau) \\ \vdots\\ p_N(\tau) \\ \end{array}\right],\ \psi(\xi)= \left[\begin{array}{c} \psi_1(\xi) \\ \vdots\\ \psi_N(\xi) \\ \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-fd0c4d2c5fa9639928a6bead5eea84f4_l3.png "Rendered by QuickLaTeX.com")





![\displaystyle{\left[\begin{array}{cc} M_{qq} & M_{qp} \\ M_{pq} & M_{pp} \\ \end{array}\right] \left[\begin{array}{c} \ddot{q} \\ \ddot{p} \end{array}\right] +\left[\begin{array}{cc} D_{qq} & D_{qp} \\ D_{pq} & D_{pp} \\ \end{array}\right] \left[\begin{array}{c} \dot{q} \\ \dot{p} \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-20d4f20d2b30e087f9e91d8e23138fb8_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ +\left[\begin{array}{cc} K_{qq} & K_{qp} \\ K_{pq} & K_{pp} \\ \end{array}\right] \left[ \begin{array}{c} q \\ p \end{array} \right] = \left[\begin{array}{c} \int_0^1\phi(\xi)\frac{L^3}{EI} f_yd\xi \\ \int_0^1\psi(\xi)\frac{L^3}{EI} f_zd\xi \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e290e382c54e788b99323cf80a06ac06_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{M_{qq}=[m^y_{ij} + \sum_{l,k=1}^NF^y_{ilkj}q_lq_k]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-64b9cea8f35b506b42b4a39f23969063_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{M_{qp}=[\sum_{l,k=1}^N N^y_{ilkj} q_l p_k]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f994a23e0e7bd4dd1208c9824da4c048_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{M_{pq}=[\sum_{l,k=1}^N N^z_{ilkj} p_l q_k]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4804f4210c89799711a737b50ec9b496_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{M_{pp}=[m^z_{ij} + \sum_{l,k=1}^N F^z_{ilkj}p_l p_k]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bf7c14a7d29adb632b291bede34ffaff_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{D_{qq}=[c^y_{ij} + \sum_{l,k=1}^ND^y_{ilkj}q_lq_k+ \sum_{l,k=1}^NE^y_{ilkj}q_l\dot{q}_k]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-63c07599e604e03960db7edf1826a3e9_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{D_{qp}=[\sum_{l,k=1}^NL^y_{ilkj}q_lp_k+\sum_{l,k=1}^NM^y_{ilkj}q_l\dot{p}_k]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a47703d3ab98482bab2ab02647edf0e5_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{D_{pq}=[\displaystyle\sum_{l,k=1}^NL^z_{ilkj}p_lq_k+\displaystyle\sum_{l,k=1}^NM^z_{ilkj}p_l\dot{q}_k]_{i,j=1,\cdots,N} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8ba846dda9b4e1a20fd16e8372ee42dc_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{D_{pp}=[c^z_{ij} + \displaystyle\sum_{l,k=1}^ND^z_{ilkj}p_lp_k+ \displaystyle\sum_{l,k=1}^NE^z_{ilkj}p_l\dot{p}_k]_{i,j=1,\cdots,N} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4854e88835c91a0efcbc614ad5179dff_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{K_{qq}=[k^y_{ij} + \displaystyle\sum_{l,k=1}^NB^y_{ilkj}q_kq_l+ \displaystyle\sum_{l,k=1}^NH^y_{ilkj}p_kp_l]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-040d1c3fd7a13639a6bdd6969cb3e672_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{K_{pp}=[k^z_{ij} + \displaystyle\sum_{l,k=1}^NB^z_{ilkj}p_kp_l+ \displaystyle\sum_{l,k=1}^NH^z_{ilkj}q_kq_l]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ef8cb395af4a7622a53810a8bebb9a74_l3.png "Rendered by QuickLaTeX.com")