| MATLAB |
%sf_syn_lmi6.m
%-----
clear all, close all
A=[0 1;-1 -2*0.01]; B1=[0;1]; B2=B1;
C1=[1 0;0 0]; D11=[0;0]; D12=[0;1];
[n,m]=size(B2);
%-----
setlmis([]);
gam=lmivar(1,[1 0]);
Y=lmivar(1,[n 1]);
Z=lmivar(2,[m n]);
%-----
lmi1=newlmi;
lmiterm([lmi1,1,1,Y],A,1,'s'); %#1:A*Y+Y*A'
lmiterm([lmi1,1,1,Z],-B2,1,'s'); %#1:-(B2*Z+Z*B2')
lmiterm([lmi1,1,2,0],B1); %#1:B1
lmiterm([lmi1,2,2,gam],-1,1); %#1:-gam
lmiterm([lmi1,3,1,Y],C1,1); %#1:C1*Y
lmiterm([lmi1,3,1,Z],-D12,1); %#1:D12*Z
lmiterm([lmi1,3,2,0],D11); %#1:D11
lmiterm([lmi1,3,3,gam],-1,1); %#1:-gam
%-----
alpha=0.1;
lmi2=newlmi;
lmiterm([lmi2,1,1,Y],A,1,'s'); %#2:A*Y+Y*A'
lmiterm([lmi2,1,1,Z],-B2,1,'s'); %#2:-(B2*Z+Z'*B2')
lmiterm([lmi2,1,1,Y],2*alpha,1); %#2:2*alpha*Y
%-----
r=2;
lmi3=newlmi;
lmiterm([lmi3,1,1,Y],-r,1); %#3:-r*Y
lmiterm([lmi3,1,2,Y],A,1); %#3:A*Y
lmiterm([lmi3,1,2,Z],-B2,1); %#3:-B2*Z
lmiterm([lmi3,2,2,Y],-r,1); %#3:-r*Y
%-----
theta=pi/4; sth=sin(theta); cth=cos(theta);
lmi4=newlmi;
lmiterm([lmi4,1,1,Y],sth*A,1,'s'); %#4:sth*(A*Y+Y*A')
lmiterm([lmi4,1,1,Z],-sth*B2,1,'s');%#4:-sth*(B2*Z+Z'*B2')
lmiterm([lmi4,1,2,Y],cth*A,1); %#4:cth*A*Y
lmiterm([lmi4,1,2,Y],1,-cth*A'); %#4:-cth*Y*A'
lmiterm([lmi4,1,2,Z],-cth*B2,1); %#4:-cth*B2*Z
lmiterm([lmi4,1,2,-Z],1,cth*B2'); %#4:cth*Z'*B2'
lmiterm([lmi4,2,2,Y],sth*A,1,'s'); %#4:sth*(A*Y+Y*A')
lmiterm([lmi4,2,2,Z],-sth*B2,1,'s');%#4:-sth*(B2*Z+Z'*B2')
%-----
lmi5=newlmi;
lmiterm([-lmi5,1,1,Y],1,1); %#5:Y
%-----
lmi6=newlmi;
lmiterm([lmi6,1,1,gam],1,1); %#6:gam
lmiterm([-lmi6,1,1,0],1e3); %#6:1000
%-----
LMIs=getlmis;
cobj=zeros(1,decnbr(LMIs));
cobj(1)=1;
[cost,xopt]=mincx(LMIs,cobj);
gopt=dec2mat(LMIs,xopt,gam);
Y=dec2mat(LMIs,xopt,Y);
Z=dec2mat(LMIs,xopt,Z);
F=Z/Y;
%-----
pl=eig(A-B2*F)
close all,figure(1)
dregion(alpha,0,r,theta,r*[-1,1,-1,1])
plot(real(pl),imag(pl),'*')
figure(2)
ol=ltisys(A,B1,C1,D11);
cl=ltisys(A-B2*F,B1,C1-D12*F,D11);
om=logspace(-2,2,200);
splot(ssub(cl,1,1),'sv',om),hold on
splot(ssub(ol,1,1),'sv',om),grid
%-----
%eof
|
 次系
次系 の
の ノルムが
ノルムが より小となるためのLMI条件は、次の通りでした。
より小となるためのLMI条件は、次の通りでした。![\displaystyle{(1)\quad \begin{array}{l} \displaystyle{{\rm tr} (CW_cC^T)<\gamma^2\quad(W_c=\int_0^\infty \exp(At)BB^T\exp(A^Tt)dt)}\\\\ \displaystyle{\Leftrightarrow \exists X_c>0,\ Q_c>0:\\ \left[\begin{array}{cc} A^TX_c+X_cA & X_cB \\ B^TX_c & -I \end{array}\right]<0,\ \left[\begin{array}{cc} X_c & C^T \\ C & Q_c \end{array}\right]>0,\ {\rm tr}(Q_c)<\gamma^2}\\\\ \displaystyle{\Leftrightarrow \exists Y_c>0,\ Q_c>0:\\ \left[\begin{array}{cc} Y_cA^T+AY_c & B \\ B^T & -I \end{array}\right]<0,\ \left[\begin{array}{cc} Y_c & Y_cC^T \\ CY_c & Q_c \end{array}\right]>0,\ {\rm tr}(Q_c)<\gamma^2} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4740750e1fdf8093b1f6322284a78a12_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(2)\quad P: \left\{\begin{array}{l} \dot{x}=Ax+B_1u_1+B_2u_2 \\ \underbrace{ \left[\begin{array}{c} y\\ u \end{array}\right] }_{y_1} = \underbrace{ \left[\begin{array}{c} C\\ 0 \end{array}\right] }_{C_1} x+ \underbrace{ \left[\begin{array}{c} 0\\ 0 \end{array}\right] }_{D_{11}}u_1+ \underbrace{ \left[\begin{array}{c} 0\\ I \end{array}\right] }_{D_{12}} u_2 \\ y_2=x \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-233587c7d6ac6840b26399b32d7f5ae2_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(4)\quad P_{CL}: \left\{\begin{array}{l} \dot{x}=\underbrace{(A-B_2F)}_{A_{CL}}x+\underbrace{B_1}_{B_{CL}}u_1 \\ y_1= \underbrace{ \left[\begin{array}{c} C\\ -F \end{array}\right] }_{C_{CL}=C_1-D_{12}F} x \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1cff650bf6e54c686a46b654002f41e1_l3.png "Rendered by QuickLaTeX.com")

 を求める問題を考えます。
を求める問題を考えます。![\displaystyle{(6)\quad \begin{array}{l} \exists Y_{CL}>0,\ Q>0:\\ \left[\begin{array}{cc} Y_{CL}A_{CL}^T+A_{CL}Y_{CL} & B_{CL} \\ B_{CL}^T & -I \end{array}\right]<0,\\ \left[\begin{array}{cc} Y_{CL} & Y_{CL}C_{CL}^T \\ C_{CL}Y_{CL} & Q \end{array}\right]>0,\\ {\rm tr}(Q)<\gamma^2 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1f42fdc63af549cb6cd701aa40eac0f7_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(7)\quad \begin{array}{l} \displaystyle{\exists Y>0,\ Q>0:\\ \left[\begin{array}{cc} Y(A-B_2F)^T+(A-B_2F)Y & B_1 \\ B_1^T & -I \end{array}\right]<0,\\ \left[\begin{array}{cc} Y & Y(C_1-D_{12}F)^T \\ (C_1-D_{12}F)Y & Q \end{array}\right]>0,\\ {\rm tr}(Q)<\gamma^2} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-90a3259c718f1035238e2463a6c5aa42_l3.png "Rendered by QuickLaTeX.com")
 を行うと、次のような
を行うと、次のような と
と に関するLMIとなります。
に関するLMIとなります。![\displaystyle{(8)\quad \begin{array}{l} \displaystyle{\exists Y>0,\ Q>0:\\ \left[\begin{array}{cc} (AY-B_2Z)^T+AY-B_2Z & B_1 \\ B_1^T & -I \end{array}\right]<0,\\ \left[\begin{array}{cc} Y & (C_1Y-D_{12}Z)^T \\ C_1Y-D_{12}Z & Q \end{array}\right]>0,\\ {\rm tr}(Q)<\gamma^2} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6b9dad597d2aabf8ef8c277abdacbf55_l3.png "Rendered by QuickLaTeX.com")
 と
と を求め、次式によって状態フィードバックゲインを決定します。
を求め、次式によって状態フィードバックゲインを決定します。
 次のコードを参考にして、
次のコードを参考にして、 の
の ノルムが
ノルムが![\displaystyle{(15)\quad \begin{array}{lll} && \sup_{\omega\in{\rm\bf R}}||\hat{G}(j\omega)||_2<\gamma \nonumber\\ &\Leftrightarrow& \exists X>0:\ \left[\begin{array}{ccc} A^TX+XA & XB & C^T \\ B^TX & -\gamma I & D^T \\ C & D & -\gamma I \end{array}\right]<0 \nonumber\\ &\Leftrightarrow& \exists Y>0:\ \left[\begin{array}{ccc} YA^T+AY & B & YC^T \\ B^T & -\gamma I & D^T \\ CY & D & -\gamma I \end{array}\right]<0\nonumber \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-fabe9aa11942205106ce125d21aa0bd2_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(17)\quad P: \left\{\begin{array}{l} \dot{x}=Ax+B_1u_1+B_2u_2 \\ \underbrace{ \left[\begin{array}{c} y\\ u \end{array}\right] }_{y_1} = \underbrace{ \left[\begin{array}{c} C\\ 0 \end{array}\right] }_{C_1} x+ \underbrace{ \left[\begin{array}{c} 0\\ 0 \end{array}\right] }_{D_{11}}u_1+ \underbrace{ \left[\begin{array}{c} 0\\ I \end{array}\right] }_{D_{12}} u_2 \\ y_2=x \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-27beeceac3c340d1c4c8c1eccb769f14_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{()\quad P_{CL}: \left\{\begin{array}{l} \dot{x}=(A-B_2F)x+B_1u_1 \\ y_1= \underbrace{ \left[\begin{array}{c} C\\ -F \end{array}\right] }_{C_1-D_{12}F} x \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9e9c5bf547f30fa45ba83bf020767e9d_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(20)\quad \hat{P}_{CL}(s)= \left[\begin{array}{c} \hat{G}_y(s)\\ \hat{G}_u(s) \end{array}\right]= \left[\begin{array}{c} C(sI-A-B_2F)^{-1}B_1\\ -F(sI-A-B_2F)^{-1}B_1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2a4e9457ffbc5873e5d272e0d1575e3b_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{ \left[\begin{array}{ccc} Y(A-B_2F)^T+(A-B_2F)Y & B_1 & Y(C_1-D_{12}F)^T \\ B_1^T & -\gamma I & D_{11}^T \\ (C_1-D_{12}F)Y & D_{11} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d53dc9e62d6af5b4cfc839c93b6d9673_l3.png "Rendered by QuickLaTeX.com")
 を行うと、次のような
を行うと、次のような
![\displaystyle{ \left[\begin{array}{ccc} (AY-B_2Z)^T+AY-B_2Z & B_1 & (C_1Y-D_{12}Z)^T \\ B_1^T & -\gamma I & D_{11}^T \\ C_1Y-D_{12}Z & D_{11} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f6a8dc294019aa496f62b9b21da1f984_l3.png "Rendered by QuickLaTeX.com")

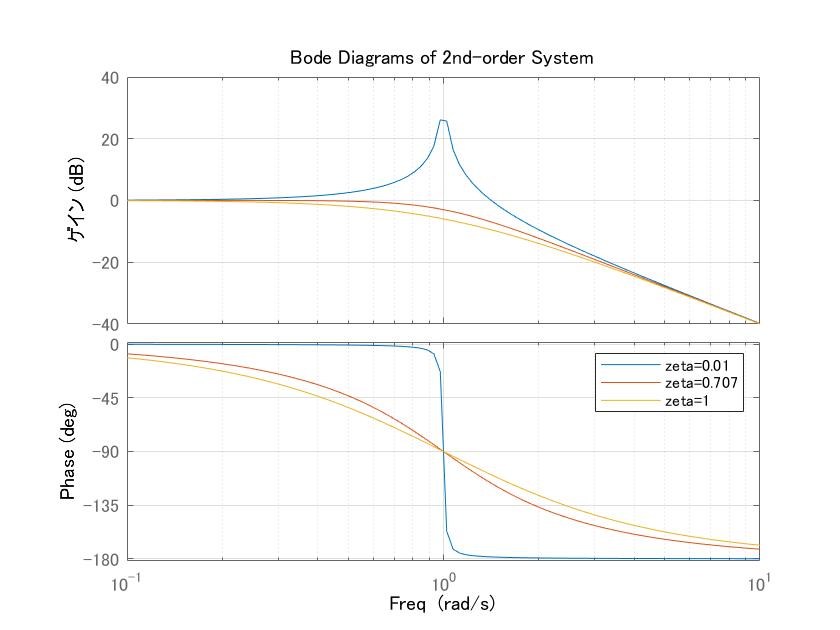
 上の2次振動系の
上の2次振動系の に対する状態フィードバック
に対する状態フィードバック による閉ループ系
による閉ループ系 において、
において、

 となるLMI条件は、次の通りでした。
となるLMI条件は、次の通りでした。
 となるLMI条件は、次のようになります。
となるLMI条件は、次のようになります。
 をもつので、LMIではなく、lmisolverを用いて解くことができません。しかしながら、変数変換
をもつので、LMIではなく、lmisolverを用いて解くことができません。しかしながら、変数変換

 となるLMI条件は、次の通りでした。
となるLMI条件は、次の通りでした。![\displaystyle{(6)\quad \begin{array}{lll} &&\lambda(A)\subset {\cal D}_2=\{s=x+jy\in{\rm\bf C}: \left[\begin{array}{cc} -r & s \\ s^* & -r \end{array}\right] <0 \}\nonumber\\ &\Leftrightarrow& \exists X>0:\ \left[\begin{array}{cc} -rX & XA \\ A^TX & -rX \end{array}\right]<0 \nonumber\\ &\Leftrightarrow& \exists Y>0:\ \left[\begin{array}{cc} -rY & AY \\ YA^T & -rY \end{array}\right]<0\nonumber \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9cde02783168cc87d584fcf28eb7011a_l3.png "Rendered by QuickLaTeX.com")
 となるLMI条件は、次のようになります。
となるLMI条件は、次のようになります。![\displaystyle{(7)\quad \exists Y>0:\ \left[\begin{array}{cc} -rY & (A-BF)Y \\ Y(A-BF)^T & -rY \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9e37ffdc03e836c93b5c36c324428f1f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(8)\quad \exists Y>0:\ \left[\begin{array}{cc} -rY & AY-BZ \\ (AY-BZ)^T & -rY \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b931214b54d3d375fcf634bd90e7634a_l3.png "Rendered by QuickLaTeX.com")
 となるLMI条件は、次の通りでした。
となるLMI条件は、次の通りでした。![\displaystyle{(10) \begin{array}{lll} &&\lambda(A)\subset {\cal D}_3=\{s=x+jy\in{\rm\bf C}:\\ && \left[\begin{array}{cc} \sin\theta & \cos\theta \\ -\cos\theta & \sin\theta \end{array}\right]s + \left[\begin{array}{cc} \sin\theta & \cos\theta \\ -\cos\theta & \sin\theta \end{array}\right]^Ts^* <0 \}\nonumber\\ &&\Leftrightarrow \exists X>0:\ \left[\begin{array}{cc} \sin\theta(XA+A^TX) & \cos\theta(XA-A^TX) \\ -\cos\theta(XA-A^TX) & \sin\theta(XA+A^TX) \end{array}\right] <0 \nonumber\\ &&\Leftrightarrow \exists Y>0:\ \left[\begin{array}{cc} \sin\theta(AY+YA^T) & \cos\theta(AY-YA^T) \\ -\cos\theta(AY-YA^T) & \sin\theta(AY+YA^T) \end{array}\right] <0\nonumber \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8ec7176d7e1ba9918e55f2d0c7c092ce_l3.png "Rendered by QuickLaTeX.com")
 となるLMI条件は、次のようになります。
となるLMI条件は、次のようになります。
![\displaystyle{ \left[\begin{array}{cc} \sin\theta((A-BF)Y+Y(A-BF)^T) & \cos\theta((A-BF)Y-Y(A-BF)^T) \\ -\cos\theta((A-BF)Y-Y(A-BF)^T) & \sin\theta((A-BF)Y+Y(A-BF)^T) \end{array}\right] <0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a739fc807f754826d7c635f1754c4f0e_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{ \left[\begin{array}{cc} \sin\theta(AY-BZ+(AY-BZ)^T) & \cos\theta(AY-BZ-(AY-BZ)^T) \\ -\cos\theta(AY-BZ-(AY-BZ)^T) & \sin\theta(AY-BZ+(AY-BZ)^T) \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-81ec104056af6c95edd1191704893873_l3.png "Rendered by QuickLaTeX.com")

 を達成する状態FBを求める関数を作成せよ。
を達成する状態FBを求める関数を作成せよ。 のジョルダン分解
のジョルダン分解 を仮定して
を仮定して
 が対角行列の場合、
が対角行列の場合、 の固有値
の固有値 に対応する固有ベクトルを
に対応する固有ベクトルを として
として![\displaystyle{(2)\quad A \underbrace{ \left[\begin{array}{ccc} v_1&\cdots&v_n \end{array}\right] }_{V} - \underbrace{ \left[\begin{array}{ccc} v_1&\cdots&v_n \end{array}\right] }_{V} \underbrace{ {\rm diag}\{\lambda_1',\cdots,\lambda_m'\} }_{\Lambda}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4cb47f7cd3e480c9041bb93c8d2d8ff7_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{= \left[\begin{array}{ccc} (A-\lambda_1'I_n)v_1&\cdots&(A-\lambda_n'I_n)v_n \end{array}\right] =B \underbrace{ \left[\begin{array}{ccc} g_1&\cdots&g_n \end{array}\right] }_{G} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6f32d4579763774a9881a001cc1840bb_l3.png "Rendered by QuickLaTeX.com")
 の固有値と一致しないならば、固有ベクトルの表現式として次式を得ます。
の固有値と一致しないならば、固有ベクトルの表現式として次式を得ます。![\displaystyle{(3)\quad \underbrace{ \left[\begin{array}{ccc} v_1&\cdots&v_n \end{array}\right] }_{V}= \left[\begin{array}{ccc} (A-\lambda_1'I_n)^{-1}Bg_1&\cdots&(A-\lambda_n'I_n)^{-1}Bg_n \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1c5a5123838e2819191c64325cc07780_l3.png "Rendered by QuickLaTeX.com")
 を、(3)の
を、(3)の が正則になるように与える。
が正則になるように与える。
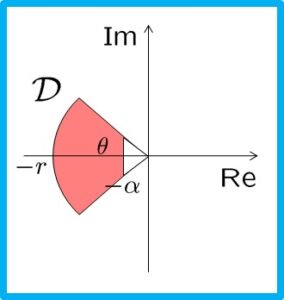
 内にある望ましい固有値
内にある望ましい固有値

 となるLMI条件(Y-LMIによる)は、次の通りでした。
となるLMI条件(Y-LMIによる)は、次の通りでした。
 となるLMI条件は、次のようになります。
となるLMI条件は、次のようになります。




 の積は
の積は の形で表され、変数変換の手法を適用することができないことに注意してください。
の形で表され、変数変換の手法を適用することができないことに注意してください。 を用いて、次のように表されます。
を用いて、次のように表されます。
![\displaystyle{ \begin{array}{l} \displaystyle{{\rm tr} (CW_cC^T)<\gamma^2}\\\\ \displaystyle{\Leftrightarrow \exists X_c>0,\ Q_c>0:\\ (1a)\quad\left[\begin{array}{cc} A^TX_c+X_cA & X_cB \\ B^TX_c & -I \end{array}\right]<0,\ \left[\begin{array}{cc} X_c & C^T \\ C & Q_c \end{array}\right]>0,\ {\rm tr}(Q_c)<\gamma^2}\\\\ \displaystyle{\Leftrightarrow \exists Y_c>0,\ Q_c>0:\\ (1b)\quad \left[\begin{array}{cc} Y_cA^T+AY_c & Y_cB \\ B^TY_c & -I \end{array}\right]<0,\ \left[\begin{array}{cc} Y_c & Y_cC^T \\ CY_c & Q_c \end{array}\right]>0,\ {\rm tr}(Q_c)<\gamma^2} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0e5eb15733d3b5cec658dab7afe757d6_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \begin{array}{l} \displaystyle{{\rm tr} (B^TW_oB)<\gamma^2}\\\\ \displaystyle{\Leftrightarrow \exists X_o>0,\ Q_o>0:\\ (2a)\quad\left[\begin{array}{cc} AX_o+X_oA^T & X_oC^T \\ CX_o & -I \end{array}\right]<0,\ \left[\begin{array}{cc} X_o & B \\ B^T & Q_o \end{array}\right]>0,\ {\rm tr}(Q_o)<\gamma^2}\\\\ \displaystyle{\Leftrightarrow \exists Y_o>0,\ Q_o>0:\\ (2b)\quad\left[\begin{array}{cc} Y_oA+A^TY_o & Y_oC^T \\ CY_o & -I \end{array}\right]<0,\ \left[\begin{array}{cc} Y_o & Y_oB \\ B^TY_o & Q_o \end{array}\right]>0,\ {\rm tr}(Q_o)<\gamma^2} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0103a79b019093fcbd4360479821e521_l3.png "Rendered by QuickLaTeX.com")
 と
と はそれぞれ
はそれぞれ



 と
と に対して、
に対して、 、
、 とおくと
とおくと![\displaystyle{(7)\quad \begin{array}{l} A^TX_c+X_cA+X_cBB^TX_c<0 \Leftrightarrow\ \left[\begin{array}{cc} A^TX_c+X_cA & X_cB \\ B^TX_c & -I \end{array}\right]<0 \\ AX_o+X_oA^T+X_oC^TCX_o<0 \Leftrightarrow\ \left[\begin{array}{cc} AX_o+X_oA^T & X_oC^T \\ CX_o & -I \end{array}\right]<0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1eab031b7ca8535cebc0a481a954f426_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(10)\quad \begin{array}{l} {\rm tr} (CW_cC^T)<\gamma^2 \Leftrightarrow\ \left[\begin{array}{cc} X_c & C^T \\ C & Q_c \end{array}\right]>0,\ {\rm tr} (Q_c)<\gamma^2\\ {\rm tr} (B^TW_oB)<\gamma^2 \Leftrightarrow\ \left[\begin{array}{cc} X_o & B \\ B^T & Q_o \end{array}\right]>0,\ {\rm tr} (Q_o)<\gamma^2 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-94628f5f4d3a01a84d931ae427db5b3c_l3.png "Rendered by QuickLaTeX.com")
 を選んで
を選んで![\displaystyle{(11)\quad \begin{array}{l} CX_c^{-1}C^T-(CW_cC^T+\epsilon I)>0 \Leftrightarrow\ \left[\begin{array}{cc} X_c & C^T \\ C & CW_cC^T+\epsilon I \end{array}\right]>0\\ B^TX_o^{-1}B-(B^TW_oB+\epsilon I)>0 \Leftrightarrow\ \left[\begin{array}{cc} X_o & B \\ B^T & B^TW_oB+\epsilon I \end{array}\right]>0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a8a8eeaf32331b7bc67b6cdb89a3f7cc_l3.png "Rendered by QuickLaTeX.com")

 、
、 とおきます。次に十分性については、
とおきます。次に十分性については、 、
、 の場合を考えれば自明です。
の場合を考えれば自明です。![\displaystyle{\boxed{ \begin{array}{lll} && \left[\begin{array}{cc} P & M \\ M^T & Q \end{array}\right]<0\\ &\Leftrightarrow& P-MQ^{-1}M^T<0,\ Q<0\\ &\Leftrightarrow& P<0,\ Q-M^TP^{-1}M<0 \end{array} }}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4efd2df144b4ea2e4b5c0dd6970ed0ac_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{\boxed{ \begin{array}{lll} && \left[\begin{array}{cc} P & M \\ M^T & Q \end{array}\right]>0\\ &\Leftrightarrow& MQ^{-1}M^T-P>0,\ Q>0\\ &\Leftrightarrow& P>0,\ M^TP^{-1}M-Q>0 \end{array} }}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ff8466bc18b10c46d2a1973fde841fb2_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(1)\quad \begin{array}{l} \displaystyle{\sup_{u\in{\cal L}_2}\frac{||y(t)||_2}{||u(t)||_2} =\sup_{\omega\in{\rm\bf R}}||\hat{G}(j\omega)||_2<\gamma} \\ \displaystyle{\Leftrightarrow \exists X>0:\ \left[\begin{array}{ccc} A^TX+XA & XB & C^T \\ B^TX & -\gamma^2 I & D^T \\ C & D & -I \end{array}\right]<0} \\ \displaystyle{\Leftrightarrow \exists Y>0:\ \left[\begin{array}{ccc} YA^T+AY & B & YC^T \\ B^T & -\gamma^2 I & D^T \\ CY & D & -I \end{array}\right]<0} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-cb76514d96e7c4115d9ea88e02ad0651_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(2)\quad \begin{array}{l} \left[\begin{array}{ccc} A^TX+XA & XB & C^T \\ B^TX & -\gamma^2 I & D^T \\ C & D &-I \end{array}\right]<0 \\ \Leftrightarrow \left[\begin{array}{cc} A^TX+XA & XB \\ B^TX & -\gamma^2 I \end{array}\right] - \left[\begin{array}{cc} C^T\\ D^T \end{array}\right] (-I) %(-\gamma^{-1} I) \left[\begin{array}{cc} C & D \end{array}\right] <0 \\ \Leftrightarrow \left[\begin{array}{cc} A^TX+XA & XB \\ B^TX & 0 \end{array}\right] < \left[\begin{array}{cc} C^T & 0 \\ D^T & I \end{array}\right] \left[\begin{array}{cc} -I & 0 \\ 0 & \gamma^2 I \end{array}\right] \left[\begin{array}{cc} C & D \\ 0 & I \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5c2560cc668d6d0690878b8eedd8885c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(3)\quad \begin{array}{l} \left[\begin{array}{ccc} A^TX+XA & XB & C^T \\ B^TX & -\gamma^2 I & D^T \\ C & D & - I \end{array}\right]<0 \\ &\Leftrightarrow \forall \left[\begin{array}{c} x \\ u \end{array}\right]\ne0: \underbrace{ \left[\begin{array}{c} x \\ u \end{array}\right]^T \left[\begin{array}{cc} A^TX+XA & XB \\ B^TX & 0 \end{array}\right] \left[\begin{array}{c} x \\ u \end{array}\right] }_{\dot{V}(x)=\frac{d}{dt}(x^TXx)} \\ < \underbrace{ \left[\begin{array}{c} x \\ u \end{array}\right]^T \left[\begin{array}{cc} C & D \\ 0 & I \end{array}\right]^T \left[\begin{array}{cc} - I & 0 \\ 0 & \gamma^2 I \end{array}\right] \left[\begin{array}{cc} C & D \\ 0 & I \end{array}\right] \left[\begin{array}{c} x \\ u \end{array}\right] }_{s(u,y)=\gamma^2 u^Tu-y^Ty} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-474ab9036f2ca5939a3c709f1500ddf6_l3.png "Rendered by QuickLaTeX.com")



 から出力
から出力 への入出力特性は不変であることから
への入出力特性は不変であることから![\displaystyle{(7) \begin{array}{l} \left[\begin{array}{ccc} A^TX+XA & XB & C^T \\ B^TX & -\gamma^2 I & D^T \\ C & D & -I \end{array}\right]<0 \\ \Leftrightarrow \left[\begin{array}{ccc} A^TX+XA & X(B\sqrt{\gamma}) & (\frac{1}{\sqrt{\gamma}}C)^T \\ (B\sqrt{\gamma})^TX & - \gamma^2 I & D^T \\ (\frac{1}{\sqrt{\gamma}}C) & D & -I \end{array}\right]<0 \\ \Leftrightarrow \left[\begin{array}{ccc} I & 0 & 0 \\ 0 & \sqrt{\gamma} I & 0 \\ 0 & 0 & \frac{1}{\sqrt{\gamma}} I \end{array}\right] \left[\begin{array}{ccc} A^TX+XA & XB & C^T \\ B^TX & -\gamma I & D^T \\ C & D &-\gamma I \end{array}\right] \left[\begin{array}{ccc} I & 0 & 0 \\ 0 & \sqrt{\gamma} I & 0 \\ 0 & 0 & \frac{1}{\sqrt{\gamma}} I \end{array}\right]<0 \\ \Leftrightarrow \left[\begin{array}{ccc} A^TX+XA & XB & C^T \\ B^TX & -\gamma I & D^T \\ C & D &-\gamma I \end{array}\right]<0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9f78ef9deeaf1d5eba2e99bef8581c5e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(8)\quad \begin{array}{l} \displaystyle{\sup_{u\in{\cal L}_2}\frac{||y(t)||_2}{||u(t)||_2} =\sup_{\omega\in{\rm\bf R}}||\hat{G}(j\omega)||_2<\gamma} \\ \displaystyle{\Leftrightarrow \exists X>0:\ \left[\begin{array}{ccc} A^TX+XA & XB & C^T \\ B^TX & -\gamma I & D^T \\ C & D & -\gamma I \end{array}\right]<0} \\ \displaystyle{\Leftrightarrow \exists Y>0:\ \left[\begin{array}{ccc} YA^T+AY & B & YC^T \\ B^T & -\gamma I & D^T \\ CY & D & -\gamma I \end{array}\right]<0} \end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0e630e89fa5b93c2df2468b74a26d002_l3.png "Rendered by QuickLaTeX.com")
 は可制御対、
は可制御対、 は可観測対と仮定しておきます。
は可観測対と仮定しておきます。 から
から への写像
への写像 の「伝達特性」をどう測るかを考えます。これはスカラの場合は正比例の関係
の「伝達特性」をどう測るかを考えます。これはスカラの場合は正比例の関係 ですから、比例定数
ですから、比例定数 に相当する量を求める話になります。
に相当する量を求める話になります。
 の行列
の行列![\displaystyle{(1)\quad \boxed{\begin{array}{l} A= \underbrace{ \left[\begin{array}{cc} U_1 & U_2 \end{array}\right] }_{U(m\times m)} \underbrace{ \left[\begin{array}{cc} {\rm diag}\{\sigma_1,\cdots,\sigma_k\} & 0_{k\times (n-k)} \\ 0_{(m-k)\times k} & 0_{(m-k)\times (n-k)} \end{array}\right] }_{\Sigma= \left[\begin{array}{cc} \Sigma_1 & 0 \\ 0 & 0 \end{array}\right] \quad(\sigma_1\ge\cdots\ge\sigma_k) } \underbrace{ \left[\begin{array}{cc} V_1^T \\ V_2^T \end{array}\right] }_{V(n\times n)^T}\\ =U_1(m\times k)\Sigma_1(k\times k)V_1(n\times k)^T \end{array}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1a8bdd72019cbda663e2a40b3a70d3b6_l3.png "Rendered by QuickLaTeX.com")
 で、
で、 と
と
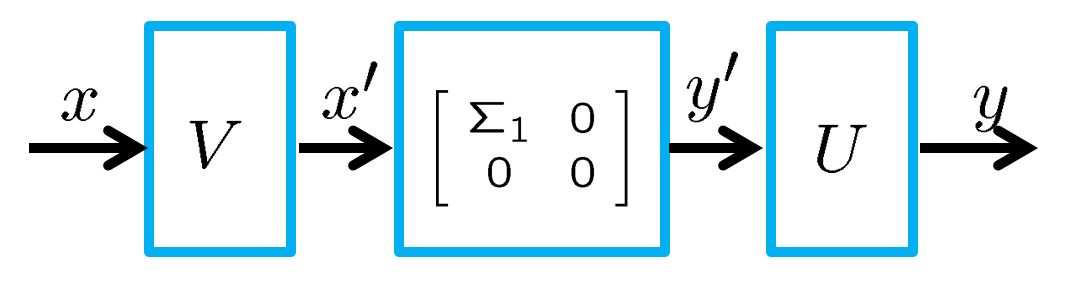 図3 特異値分解
図3 特異値分解 ノルムと呼ばれます。
ノルムと呼ばれます。





 (行列
(行列 または
または の最大固有値の正の平方根)によって測られます。
の最大固有値の正の平方根)によって測られます。 から出力
から出力 への漸近安定な
への漸近安定な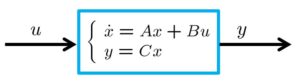
 とします。
とします。

 のノルムを次のように定義し、このノルムが有界な時間関数の集合を
のノルムを次のように定義し、このノルムが有界な時間関数の集合を と表記します。
と表記します。

 の2ノルムに関する不等式
の2ノルムに関する不等式


 ノルムを次式で定義します。
ノルムを次式で定義します。
 の特異値は
の特異値は であることに注意すると、スカラ系の
であることに注意すると、スカラ系の をプロットした曲線は
をプロットした曲線は プロットと呼ばれています。
プロットと呼ばれています。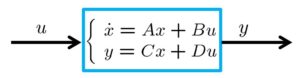


 入力
入力 出力
出力
 個あります。いま任意の行列
個あります。いま任意の行列![X=[x_{ij}]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3394006e6d9e3c7463ebe6315fe0f41c_l3.png "Rendered by QuickLaTeX.com") のすべての要素の2乗和
のすべての要素の2乗和 はまたは
はまたは で表されることに注意します。すべてのインパルス応答の2乗面積の総和は
で表されることに注意します。すべてのインパルス応答の2乗面積の総和は



 に注意して
に注意して
 ノルムと呼びます。
ノルムと呼びます。



![\displaystyle{(4)\quad \int_0^\infty g^2(t)\,dt =\int_0^\infty \frac{K^2}{T^2}e^{-\frac{2}{T}t}\,dt} =\frac{K^2}{T^2}\left[-\frac{T}{2}e^{-\frac{2}{T}t}\right]_0^\infty =\frac{K^2}{2T} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-865b1f2142004beab5931a587398aeff_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(5)\quad \frac{1}{2\pi}\int_{-\infty}^\infty |\hat{g}(j\omega)|^2\,d\omega =\frac{1}{2\pi}\int_{-\infty}^\infty \frac{K^2}{1+\omega^2 T^2}\,d\omega =\frac{1}{2\pi}{K^2}\left[\frac{1}{T}\tan^{-1}\omega T\right]_{-\infty}^\infty =\frac{1}{2\pi}\frac{K^2}{T}\pi }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4f256fb1e88f775254908ce2794361d0_l3.png "Rendered by QuickLaTeX.com")
 の特異値がその絶対値であることに注意して
の特異値がその絶対値であることに注意して

 )は、クロネッカ積の公式
)は、クロネッカ積の公式 を用いて、
を用いて、 (
( )のとき
)のとき
 )を示すために、まず
)を示すために、まず


![\displaystyle{(5)\quad J(\lambda,k)=\left[\begin{array}{cccc} \lambda & 1 & & 0\\ 0 & \lambda & \ddots & \\ \vdots & \ddots & \ddots & 1 \\ 0 & \cdots & 0 & \lambda \end{array}\right]\in{\rm\bf R}^{k\times k} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ab96841e90e0d9dd55c8e1fbe6d37b58_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(6)\quad T_\epsilon=\left[\begin{array}{cccc} 1 & 0 & \cdots & 0\\ 0 & \frac{1}{\epsilon} & \ddots & \vdots\\ \vdots & \ddots & \ddots & 0\\ 0 & \cdots & 0 & \frac{1}{\epsilon^{k-1}} \end{array}\right],\ T_\epsilon^{-1}=\left[\begin{array}{cccc} 1 & 0 & \cdots & 0\\ 0 & {\epsilon} & \ddots & \vdots\\ \vdots & \ddots & \ddots & 0\\ 0 & \cdots & 0 & {\epsilon^{k-1}} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-105301a3a42f7ab0eb9750acac26e2ce_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(7)\quad \begin{array}{l} T_\epsilon J(\lambda,k)T_\epsilon^{-1}\\ =T_\epsilon \left[\begin{array}{cccc} \lambda & 1 & & 0\\ 0 & \lambda & \ddots & \\ \vdots & \ddots & \ddots & 1 \\ 0 & \cdots & 0 & \lambda \end{array}\right] \left[\begin{array}{cccc} 1 & 0 & \cdots & 0\\ 0 & {\epsilon} & \ddots & \vdots\\ \vdots & \ddots & \ddots & 0\\ 0 & \cdots & 0 & {\epsilon^{k-1}} \end{array}\right]\\ =\left[\begin{array}{cccc} 1 & 0 & \cdots & 0\\ 0 & \frac{1}{\epsilon} & \ddots & \vdots\\ \vdots & \ddots & \ddots & 0\\ 0 & \cdots & 0 & \frac{1}{\epsilon^{k-1}} \end{array}\right] \left[\begin{array}{cccc} \lambda & \epsilon & & 0\\ 0 & \lambda\epsilon & \ddots & \\ \vdots & \ddots & \ddots & \epsilon^{k-1} \\ 0 & \cdots & 0 & \lambda\epsilon^{k-1} \end{array}\right]\\ =\left[\begin{array}{cccc} \lambda & \epsilon & & 0\\ 0 & \lambda & \ddots & \\ \vdots & \ddots & \ddots & \epsilon \\ 0 & \cdots & 0 & \lambda \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-517f70ee4d5a06e559e5f4be6fd4bd76_l3.png "Rendered by QuickLaTeX.com")
 をブロック対角に持たせた
をブロック対角に持たせた を用いて
を用いて
 に対して対角行列となります。したがって、(3)と同様に次式を得ます。
に対して対角行列となります。したがって、(3)と同様に次式を得ます。
 とおき、
とおき、 (
( )を用いて
)を用いて
 を考えます。
を考えます。
![\displaystyle{(12)\quad \begin{array}{lll} &&\lambda(A)\subset {\cal D}_3=\{s=x+jy\in{\rm\bf C}:\\ && \left[\begin{array}{cc} \sin\theta & \cos\theta \\ -\cos\theta & \sin\theta \end{array}\right]s + \left[\begin{array}{cc} \sin\theta & \cos\theta \\ -\cos\theta & \sin\theta \end{array}\right]^Ts^* <0 \}\nonumber\\ &&\Leftrightarrow \exists X>0:\ \left[\begin{array}{cc} \sin\theta(XA+A^TX) & \cos\theta(XA-A^TX) \\ -\cos\theta(XA-A^TX) & \sin\theta(XA+A^TX) \end{array}\right] <0 \nonumber\\ &&\Leftrightarrow \exists Y>0:\ \left[\begin{array}{cc} \sin\theta(AY+YA^T) & \cos\theta(AY-YA^T) \\ -\cos\theta(AY-YA^T) & \sin\theta(AY+YA^T) \end{array}\right] <0\nonumber \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3b534e97017d8856b3ce56b56e0c3ab5_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(13)\quad \begin{array}{lll} && \left[\begin{array}{cc} \sin\theta & \cos\theta \\ -\cos\theta & \sin\theta \end{array}\right]s + \left[\begin{array}{cc} \sin\theta & \cos\theta \\ -\cos\theta & \sin\theta \end{array}\right]^Ts^* <0 \nonumber\\ &\Leftrightarrow& \left[\begin{array}{cc} (s+s^*)\sin\theta & (s-s^*)\cos\theta \\ -(s-s^*)\cos\theta & (s+s^*)\sin\theta \end{array}\right] <0 \nonumber\\ &\Leftrightarrow& \left[\begin{array}{cc} 2x\sin\theta & 2jy\cos\theta \\ -2jy\cos\theta & 2x\sin\theta \end{array}\right] <0 \nonumber\\ &\Leftrightarrow& x\sin\theta-jy\cos\theta\frac{1}{x\sin\theta}(-j)y\cos\theta<0,\ x\sin\theta<0 \nonumber\\ &\Leftrightarrow& x^2\sin^2\theta-y^2\cos^2\theta>0,\ x<0 \nonumber\\ &\Leftrightarrow& \tan\theta>\frac{|y|}{-x},\ x<0 \nonumber \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0e18cdb9a2d398da5bbf4a4c180b6b22_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(14) \begin{array}{lll} &&\left[\begin{array}{cc} v^{*T} & 0^{T}\\ 0^{T} & v^{*T} \end{array}\right] \left[\begin{array}{cc} \sin\theta(XA+A^TX) & \cos\theta(XA-A^TX) \\ -\cos\theta(XA-A^TX) & \sin\theta(XA+A^TX) \end{array}\right] \left[\begin{array}{cc} v & 0\\ 0 & v \end{array}\right] \nonumber\\ &=& \left[\begin{array}{cc} \sin\theta(v^{*T}X(\lambda v)+(\lambda^*v^{*T})Xv) & \cos\theta(v^{*T}X(\lambda v)-(\lambda^*v^{*T})Xv) \\ -\cos\theta(v^{*T}X(\lambda v)-(\lambda^*v^{*T})Xv) & \sin\theta(v^{*T}X(\lambda v)+(\lambda^*v^{*T})Xv) \end{array}\right] \nonumber\\ &=& \underbrace{ \left[\begin{array}{cc} (\lambda+\lambda^*)\sin\theta & (\lambda-\lambda^*)\cos\theta \\ -(\lambda-\lambda^*)\cos\theta & (\lambda+\lambda^*)\sin\theta \end{array}\right] }_{<0} \underbrace{v^{*T}Xv}_{>0}<0 \nonumber \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-285477ad44caf135647233332c329df5_l3.png "Rendered by QuickLaTeX.com")
 とおくと、次が成り立ちます。
とおくと、次が成り立ちます。![\displaystyle{(15) \begin{array}{lll} && \left[\begin{array}{cc} x_1^T & x_2^T \end{array}\right] \left[\begin{array}{cc} \sin\theta(XA+A^TX) & \cos\theta(XA-A^TX) \\ -\cos\theta(XA-A^TX) & \sin\theta(XA+A^TX) \end{array}\right] \left[\begin{array}{c} x_1\\ x_2 \end{array}\right] <0 \nonumber\\ &&\quad (\forall x_1,x_2\ne0)\nonumber\\ &\Leftrightarrow& \left[\begin{array}{cc} x_1^TX & x_2^TX \end{array}\right]\\ && \left[\begin{array}{cc} \sin\theta(AX^{-1}+X^{-1}A^T) & \cos\theta(AX^{-1}-X^{-1}A^T) \\ -\cos\theta(AX^{-1}-X^{-1}A^T) & \sin\theta(AX^{-1}+X^{-1}A^T) \end{array}\right] \left[\begin{array}{c} Xx_1\\ Xx_2 \end{array}\right] <0 \nonumber\\ &\Leftrightarrow& \left[\begin{array}{cc} y_1^T & y_2^T \end{array}\right] \left[\begin{array}{cc} \sin\theta(AY+YA^T) & \cos\theta(AY-YA^T) \\ -\cos\theta(AY-YA^T) & \sin\theta(AY+YA^T) \end{array}\right] \left[\begin{array}{c} y_1\\ y_2 \end{array}\right] <0 \nonumber\\ &&\quad (\forall y_1,y_2\ne0)\nonumber \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-316c19f9344b2195c495883a36293683_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(16)\quad \begin{array}{lll} && \lambda(A)\subset {\cal D}={\cal D}_1\cap{\cal D}_2\cap{\cal D}_3\nonumber\\ &&\Leftrightarrow \exists X>0:\nonumber\\ & & \left\{\begin{array}{l} 2\alpha X+XA+A^TX<0 \\ \left[\begin{array}{cc} -rX & XA \\ A^TX & -rX \end{array}\right]<0 \\ \left[\begin{array}{cc} \sin\theta(XA+A^TX) & \cos\theta(XA-A^TX) \\ -\cos\theta(XA-A^TX) & \sin\theta(XA+A^TX) \end{array}\right] <0 \end{array}\right.\nonumber\\ &&\Leftrightarrow \exists Y>0:\nonumber\\ & & \left\{\begin{array}{l} 2\alpha Y+AY+YA^T<0 \\ \left[\begin{array}{cc} -rY & AY \\ YA^T & -rY \end{array}\right]<0 \\ \left[\begin{array}{cc} \sin\theta(AY+YA^T) & \cos\theta(AY-YA^T) \\ -\cos\theta(AY-YA^T) & \sin\theta(AY+YA^T) \end{array}\right] <0 \end{array}\right.\nonumber \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a5629f5f3a111b24527162f90eb8cad4_l3.png "Rendered by QuickLaTeX.com")
 制約を満たす状態FBを求める関数を作成せよ。
制約を満たす状態FBを求める関数を作成せよ。 を考えます。
を考えます。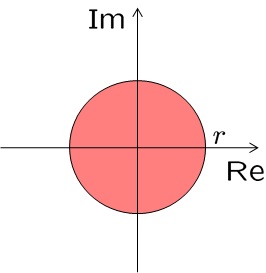
![\displaystyle{(8)\quad \begin{array}{lll} &&\lambda(A)\subset {\cal D}_2=\{s=x+jy\in{\rm\bf C}: \left[\begin{array}{cc} -r & s \\ s^* & -r \end{array}\right] <0 \}\nonumber\\ &\Leftrightarrow& \exists X>0:\ \left[\begin{array}{cc} -rX & XA \\ A^TX & -rX \end{array}\right]<0 \nonumber\\ &\Leftrightarrow& \exists Y>0:\ \left[\begin{array}{cc} -rY & AY \\ YA^T & -rY \end{array}\right]<0\nonumber \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5662d8b7c69301806b9c41c9e567c679_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(9)\quad \begin{array}{lll} && \left[\begin{array}{cc} -r & s \\ s^* & -r \end{array}\right]<0\\ &\Leftrightarrow& (-r)-s\frac{1}{(-r)}s^*<0,\ -r<0 \nonumber\\ &\Leftrightarrow& r^2-(x+jy)(x-jy)>0 \nonumber\\ &\Leftrightarrow& x^2+y^2<r^2 \nonumber\end{array}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2a615e481d49cd65c7af58606dce9ebb_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(10)\quad \begin{array}{lll} &&\left[\begin{array}{cc}v^{*T}&0^{T}\\0^{T}&v^{*T}\end{array}\right] \left[\begin{array}{cc}-rX&XA\\A^TX&-rX\end{array}\right] \left[\begin{array}{cc}v&0\\0&v\end{array}\right]\nonumber\\ &=& \left[\begin{array}{cc} -rv^{*T}Xv&v^{*T}X(\lambda v)\\ (\lambda^*v^{*T})Xv&-rv^{*T}Xv& \end{array}\right]\nonumber\\ &=& \underbrace{ \left[\begin{array}{cc} -r&\lambda\\\lambda^*&-r \end{array}\right] }_{<0} \underbrace{v^{*T}xv}_{>0}<0 \nonumber \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ee725f421be58c27c34f90905b890229_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(11)\quad \begin{array}{lll} && \left[\begin{array}{cc} x_1^T & x_2^T \end{array}\right] \left[\begin{array}{cc} -rX & XA \\ A^TX & -rX \end{array}\right] \left[\begin{array}{c} x_1\\ x_2 \end{array}\right] <0 \quad (\forall x_1,x_2\ne0)\nonumber\\ &\Leftrightarrow& \left[\begin{array}{cc} x_1^TX & x_2^TX \end{array}\right] \left[\begin{array}{cc} -rX^{-1} & AX^{-1} \\ X^{-1}A^T & -rX^{-1} \end{array}\right] \left[\begin{array}{c} Xx_1\\ Xx_2 \end{array}\right] <0 \nonumber\\ &\Leftrightarrow& \left[\begin{array}{cc} y_1^T & y_2^T \end{array}\right] \left[\begin{array}{cc} -rY & AY \\ YA^T & -rY \end{array}\right] \left[\begin{array}{c} y_1\\ y_2 \end{array}\right] <0 \quad (\forall y_1,y_2\ne0)\nonumber \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c0fd523c8514218c28986c8a38f4dec1_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(18)\quad \begin{array}{lll} &&\frac{x^2}{a^2}+\frac{y^2}{b^2}<1\Leftrightarrow\frac{(\frac{s+s^*}{2})^2}{a^2}+\frac{(\frac{s-s^*}{2j})^2}{b^2}<1 \\ &&\Leftrightarrow\ b^2(s+s^*)^2-a^2(s-s^*)^2<4a^2b^2\\ &&\Leftrightarrow\ (b(s+s^*)+a(s-s^*))(b(s+s^*)-a(s-s^*))<4a^2b^2 \\ &&\Leftrightarrow\ -4a^2b^2+((b+a)s+(b-a)s^*))((b-a)s+(b+a)s^*))<0 \\ &&\Leftrightarrow\ \left[\begin{array}{cc} -4a^2b^2 & (b+a)s+(b-a)s^* \\ (b-a)s+(b+a)s^* & -1 \end{array}\right]<0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b25e3009225c1f9a4590486d7ac6c43d_l3.png "Rendered by QuickLaTeX.com")
 次の領域を表す
次の領域を表す
![\displaystyle{(20)\quad \begin{array}{lll} &&\frac{x^2}{a^2}-\frac{y^2}{b^2}>1,\ x<-a\ \Leftrightarrow\ \frac{(\frac{s+s^*}{2})^2}{a^2}-\frac{(\frac{s-s^*}{2j})^2}{b^2}>1,\ \frac{s+s^*}{2}<-a}\\ &&\Leftrightarrow\ b^2(s+s^*)^2+a^2(s-s^*)^2>4a^2b^2,\ s+s^*+2a<0\\ &&\Leftrightarrow\ b^2(s+s^*+2a)(s+s^*-2a)+a^2(s-s^*)^2>0,\ s+s^*+2a<0\\ &&\Leftrightarrow\ b(s+s^*-2a)-\frac{-a^2(s-s^*)^2}{b(s+s^*+2a)}<0,b(s+s^*+2a)<0\\ &&\Leftrightarrow\ \left[\begin{array}{cc} b(s+s^*+2a) & a(s-s^*) \\ -a(s-s^*) & b(s+s^*-2a) \end{array}\right]<0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-00ed2494a2b6bd5158edea1ece4fc648_l3.png "Rendered by QuickLaTeX.com")