状態FB用LMI(固有値制約)…Homework
[0]  次系
次系 に対する状態フィードバック
に対する状態フィードバック による閉ループ系
による閉ループ系 において、
において、

となるように状態フィードバックゲイン を求める問題を考えます。
を求める問題を考えます。
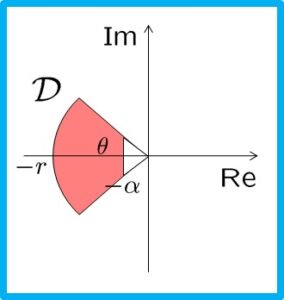
図1 領域
[1]  となるLMI条件は、次の通りでした。
となるLMI条件は、次の通りでした。

したがって、 となるLMI条件は、次のようになります。
となるLMI条件は、次のようになります。

これは、未知行列と の積
の積 をもつので、LMIではなく、lmisolverを用いて解くことができません。しかしながら、変数変換
をもつので、LMIではなく、lmisolverを用いて解くことができません。しかしながら、変数変換 を行うと、次のようなと
を行うと、次のようなと に関するLMIとなります。
に関するLMIとなります。
 |
これを解いてとを求め、次式によって状態フィードバックゲインを決定します。

[2]  となるLMI条件は、次の通りでした。
となるLMI条件は、次の通りでした。
![\displaystyle{(6)\quad \begin{array}{lll} &&\lambda(A)\subset {\cal D}_2=\{s=x+jy\in{\rm\bf C}: \left[\begin{array}{cc} -r & s \\ s^* & -r \end{array}\right] <0 \}\nonumber\\ &\Leftrightarrow& \exists X>0:\ \left[\begin{array}{cc} -rX & XA \\ A^TX & -rX \end{array}\right]<0 \nonumber\\ &\Leftrightarrow& \exists Y>0:\ \left[\begin{array}{cc} -rY & AY \\ YA^T & -rY \end{array}\right]<0\nonumber \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9cde02783168cc87d584fcf28eb7011a_l3.png "Rendered by QuickLaTeX.com")
したがって、 となるLMI条件は、次のようになります。
となるLMI条件は、次のようになります。
![\displaystyle{(7)\quad \exists Y>0:\ \left[\begin{array}{cc} -rY & (A-BF)Y \\ Y(A-BF)^T & -rY \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9e37ffdc03e836c93b5c36c324428f1f_l3.png "Rendered by QuickLaTeX.com")
ここで、変数変換を行うと、次のようなとに関するLMIとなります。
![\displaystyle{(8)\quad \exists Y>0:\ \left[\begin{array}{cc} -rY & AY-BZ \\ (AY-BZ)^T & -rY \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b931214b54d3d375fcf634bd90e7634a_l3.png "Rendered by QuickLaTeX.com") |
これを解いてとを求め、次式によって状態フィードバックゲインを決定します。

[3]  となるLMI条件は、次の通りでした。
となるLMI条件は、次の通りでした。
![\displaystyle{(10) \begin{array}{lll} &&\lambda(A)\subset {\cal D}_3=\{s=x+jy\in{\rm\bf C}:\\ && \left[\begin{array}{cc} \sin\theta & \cos\theta \\ -\cos\theta & \sin\theta \end{array}\right]s + \left[\begin{array}{cc} \sin\theta & \cos\theta \\ -\cos\theta & \sin\theta \end{array}\right]^Ts^* <0 \}\nonumber\\ &&\Leftrightarrow \exists X>0:\ \left[\begin{array}{cc} \sin\theta(XA+A^TX) & \cos\theta(XA-A^TX) \\ -\cos\theta(XA-A^TX) & \sin\theta(XA+A^TX) \end{array}\right] <0 \nonumber\\ &&\Leftrightarrow \exists Y>0:\ \left[\begin{array}{cc} \sin\theta(AY+YA^T) & \cos\theta(AY-YA^T) \\ -\cos\theta(AY-YA^T) & \sin\theta(AY+YA^T) \end{array}\right] <0\nonumber \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8ec7176d7e1ba9918e55f2d0c7c092ce_l3.png "Rendered by QuickLaTeX.com")
したがって、 となるLMI条件は、次のようになります。
となるLMI条件は、次のようになります。

![\displaystyle{ \left[\begin{array}{cc} \sin\theta((A-BF)Y+Y(A-BF)^T) & \cos\theta((A-BF)Y-Y(A-BF)^T) \\ -\cos\theta((A-BF)Y-Y(A-BF)^T) & \sin\theta((A-BF)Y+Y(A-BF)^T) \end{array}\right] <0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a739fc807f754826d7c635f1754c4f0e_l3.png "Rendered by QuickLaTeX.com")
ここで、変数変換を行うと、次のようなとに関するLMIとなります。
 ![\displaystyle{ \left[\begin{array}{cc} \sin\theta(AY-BZ+(AY-BZ)^T) & \cos\theta(AY-BZ-(AY-BZ)^T) \\ -\cos\theta(AY-BZ-(AY-BZ)^T) & \sin\theta(AY-BZ+(AY-BZ)^T) \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-81ec104056af6c95edd1191704893873_l3.png "Rendered by QuickLaTeX.com") |
これを解いてとを求め、次式によって状態フィードバックゲインを決定します。

演習B32…Flipped Classroom
 次のコードを参考にして、
次のコードを参考にして、 を達成する状態FBを求める関数を作成せよ。
を達成する状態FBを求める関数を作成せよ。
| MATLAB |
|