1次系の時間応答…Homework
[1] 次の1入力1出力1次系の状態空間表現を考えます。

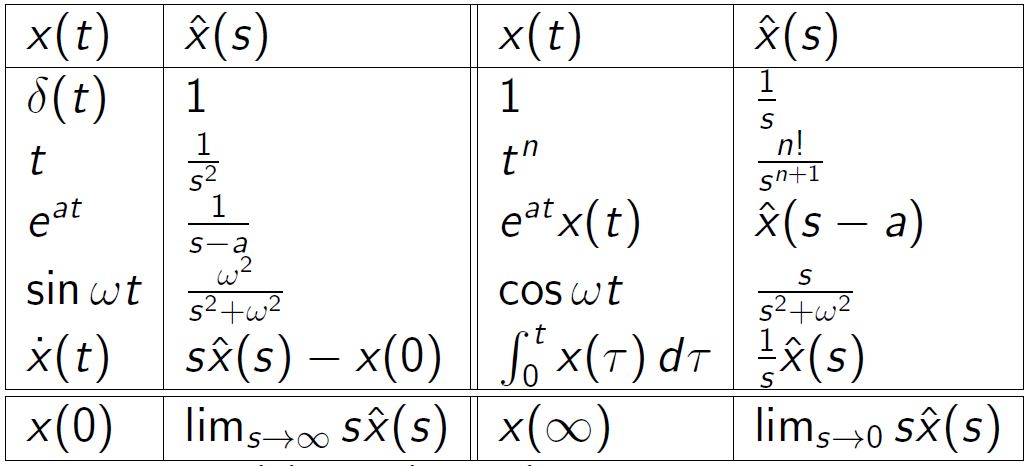
これから、1次系の時間応答の表現式

を得ます(Note A02-1参照)。ここで、インパルス応答と呼ばれる

を定義しますと、上式は

すなわち、1次系の時間応答は、零入力応答(第1項)と零状態応答(第2項)の和でとなります。
●実際、 、
、 、
、 について
について を求めてみると次のグラフが得られます。
を求めてみると次のグラフが得られます。
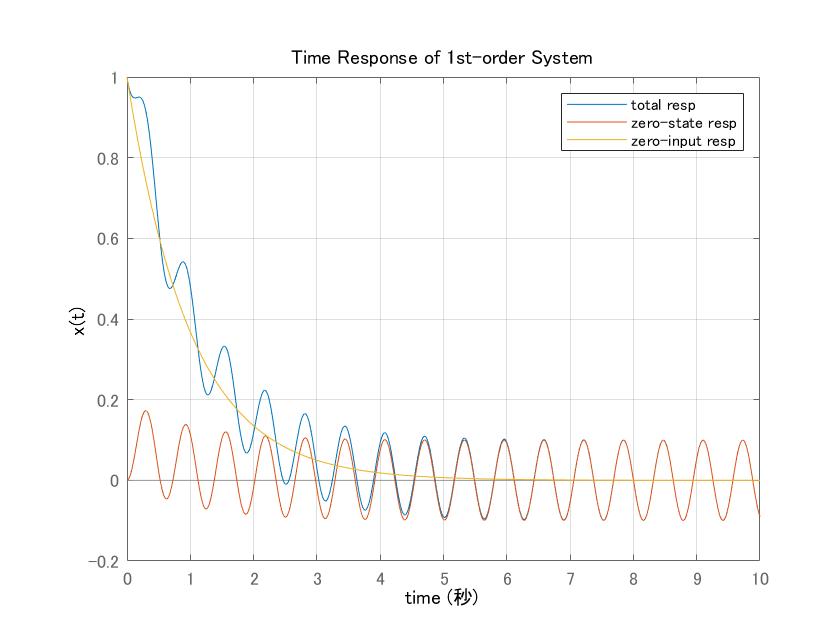
図1 どれが零状態応答か?
[2] (1)への入力 として次図の時間関数を考えます。
として次図の時間関数を考えます。
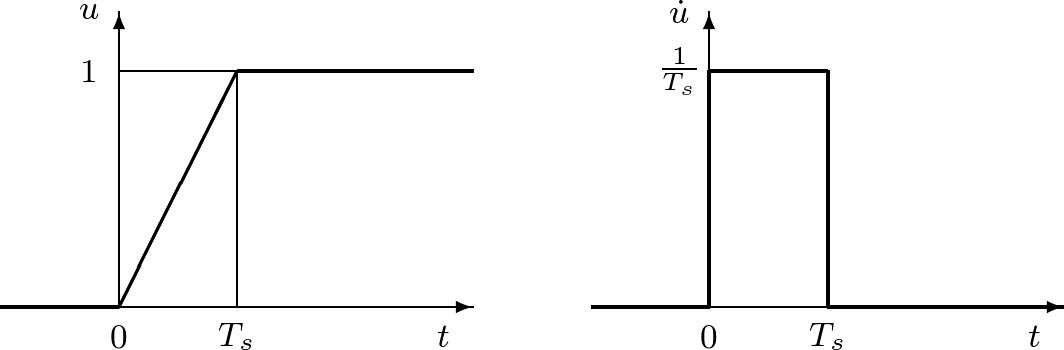
図2 ステップ入力とインパルス入力( )
)
左図においてとしたものがステップ入力、

です。これを(2)に代入すると、

より、ステップ応答が次のように表されます。

すなわち、インパルス応答を積分してステップ応答が得られます。逆に、ステップ応答を微分してインパルス応答が得られることも分かります。
図2の右図は左図の微分 を表していますが、としたものがインパルス入力(デルタ関数)です。実は(3)で定義したインパルス応答はこのインパルス入力に対する応答です。このことを理解するために、いま1次系の状態方程式を微分して
を表していますが、としたものがインパルス入力(デルタ関数)です。実は(3)で定義したインパルス応答はこのインパルス入力に対する応答です。このことを理解するために、いま1次系の状態方程式を微分して

を得ます。これは1次系に入力を与えた場合の応答は であることを示しています。図2の左図でとしたステップ入力に対する応答がステップ応答です。図2の右図でとしたインパルス入力はステップ入力の微分ですから、その応答はステップ応答の微分として得られ、インパルス応答となります。すなわち、ステップ応答を微分するとインパルス応答が得られることが分かります。
であることを示しています。図2の左図でとしたステップ入力に対する応答がステップ応答です。図2の右図でとしたインパルス入力はステップ入力の微分ですから、その応答はステップ応答の微分として得られ、インパルス応答となります。すなわち、ステップ応答を微分するとインパルス応答が得られることが分かります。
[3] 特別な3種類の入力(ステップ入力、インパルス入力、正弦波入力)に対する零状態応答(ステップ応答、インパルス応答、正弦波応答)を考え、これらの相互関係を調べます。

図3 1次系の時間応答の相互関係
一般に、「システムを知る」ということは「どんな入力を与えられても出力を推測できる」ことを意味します。したがって、平衡状態( )にある場合、インパルス応答さえ分かれば、畳み込み積分を行って出力(零状態応答)が計算できます。この意味で、インパルス応答は重要なのです。また、インパルス応答自体の計算は、
)にある場合、インパルス応答さえ分かれば、畳み込み積分を行って出力(零状態応答)が計算できます。この意味で、インパルス応答は重要なのです。また、インパルス応答自体の計算は、 としたときの零入力応答を求めて行います。ステップ応答が分かれば、これを微分してインパルス応答が分かります。また、インパルス応答をラプラス変換したものが、正弦波応答と密接に関係しています。このことはあとで詳しく述べます。
としたときの零入力応答を求めて行います。ステップ応答が分かれば、これを微分してインパルス応答が分かります。また、インパルス応答をラプラス変換したものが、正弦波応答と密接に関係しています。このことはあとで詳しく述べます。
[4] 次のようにパラメータライズされた漸近安定な1次系を考えます。 、
、 はそれぞれ時定数、定常ゲインと呼ばれます。
はそれぞれ時定数、定常ゲインと呼ばれます。

このインパルス応答は次式で与えられます。

これを積分して
![\displaystyle{(11)\quad y(t)=\frac{K}{T}\int_0^te^{-\frac{1}{T}\tau}d\tau=\frac{K}{T}\left[\frac{e^{-\frac{1}{T}\tau}}{-\frac{1}{T}}\right]_0^t =-K(e^{-\frac{1}{T}t}-1)=K(1-e^{-\frac{1}{T}t}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7bfde10f7b48435b229585a7aded9380_l3.png "Rendered by QuickLaTeX.com")
すなわちステップ応答は次式で表されます。

ここで、 のときは
のときは

となります。また、 での接線は
での接線は

ですから、 となります。この時定数は、最終値の63.2%まで到達する時間、または初期速度で到達した場合の時間(初期時刻における接線がと交わる時刻)として特徴付けられます。
となります。この時定数は、最終値の63.2%まで到達する時間、または初期速度で到達した場合の時間(初期時刻における接線がと交わる時刻)として特徴付けられます。
●実際、 、
、 について、ステップ応答
について、ステップ応答 を求めてみると次のグラフが得られます。最終値に到達する時間は大体
を求めてみると次のグラフが得られます。最終値に到達する時間は大体 であることが分かります。
であることが分かります。
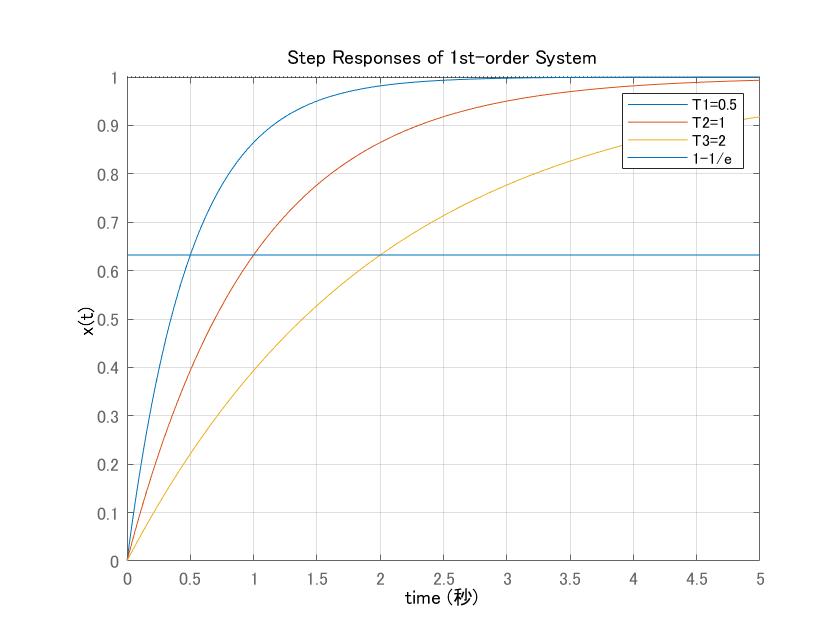
図4 1次系のステップ応答から時定数を求める補助線とは?
[5] 時定数は平衡状態に復帰する時間の目安にもなります。漸近安定な1次自由系を次のようにパラメータライズします。

この解は

ですから、のときは

となります。また、での接線は

ですから、 となります。この時定数は、初期値の36.7%まで復帰する時間、または初期速度で復帰した場合の時間(初期時刻における接線が0と交わる時刻)として特徴付けられます。
となります。この時定数は、初期値の36.7%まで復帰する時間、または初期速度で復帰した場合の時間(初期時刻における接線が0と交わる時刻)として特徴付けられます。
●実際、時刻において平衡状態 が乱されになったとし、についてを求めてみると次のグラフが得られます。平衡状態に復帰する時間は大体であることを表します。
が乱されになったとし、についてを求めてみると次のグラフが得られます。平衡状態に復帰する時間は大体であることを表します。
<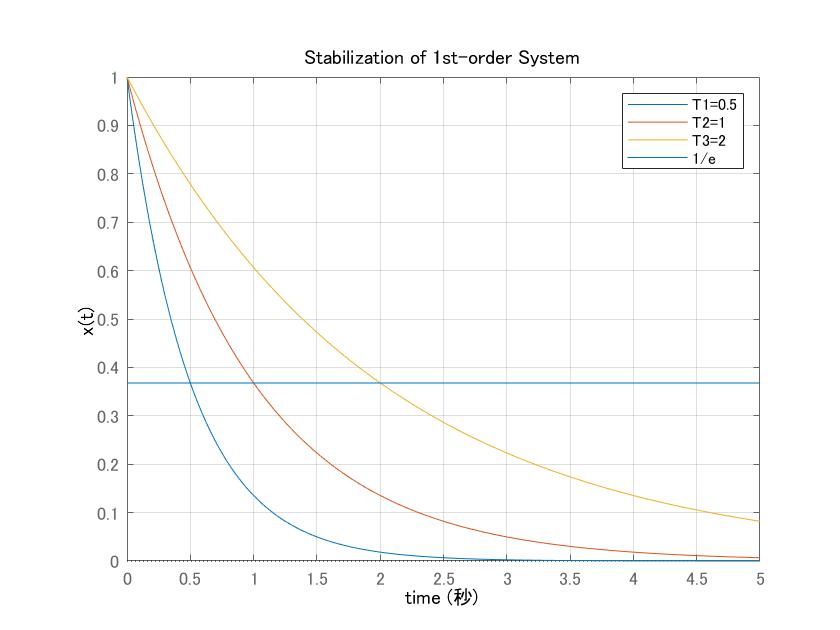
図5 1次自由系において平衡状態に復帰する時間(時定数)を定める補助線とは?
演習A02-1…Flipped Classroom
 図1の時間応答を描くプログラムを作成せよ。
図1の時間応答を描くプログラムを作成せよ。
| MATLAB |
|
| SCILAB |
|
 図4のステップ応答#1を描き、適当な補助線を引いて、交点の座標から時定数を求めるプログラムを作成せよ。
図4のステップ応答#1を描き、適当な補助線を引いて、交点の座標から時定数を求めるプログラムを作成せよ。
| MATLAB |
|
| SCILAB |
|
[6] 1次系(1)をラプラス変換(Note A02-3参照)して、とすると(零状態応答を考えているので)


ここで現れた

を伝達関数と呼びます。伝達関数 に
に を代入した
を代入した を周波数伝達関数と呼び、正弦波入力に対する時間応答、すなわち周波数応答を特徴づけることができます。
を周波数伝達関数と呼び、正弦波入力に対する時間応答、すなわち周波数応答を特徴づけることができます。
●漸近安定な1次系(9)の伝達関数は次式で与えられます。

演習A02-2...Flipped Classroom
1次系のステップ応答を次式を逆ラプラス変換して求めなさい。

次のような無駄時間と呼ばれる特殊な入出力関係を考えます。

これをラプラス変換して無駄時間の伝達関数は次式をとなることを示しなさい。

ヒント:

[7] 漸近安定な1次系(9)を考えます。正弦波入力に対する零状態応答すなわち周波数応答は、Note A02-2を参照して

ここで、 とすると
とすると

ただし

これは、入力が正弦波のときは、時間が十分立てば、出力も正弦波となることを示しています。その振幅と位相はそれぞれ の絶対値と偏角となっています。
の絶対値と偏角となっています。
 をゲイン、
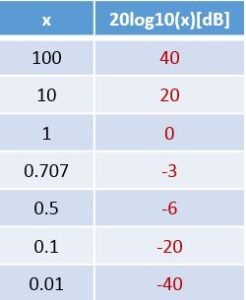
をゲイン、 を位相と呼びます。このゲイン線図と位相線図をペアにして片対数グラフにプロットしたものをボード線図と呼びます。ゲインはdb値(
を位相と呼びます。このゲイン線図と位相線図をペアにして片対数グラフにプロットしたものをボード線図と呼びます。ゲインはdb値( )、位相はdeg値(
)、位相はdeg値( )です。
)です。
●実際、について、ボード線図を描いてみると次のグラフが得られます

図6 1次系のボード線図から時定数を求める補助線とは?
ちなみに

を満足する は
は

となり、帯域幅と呼びます。実際、上図で-3dBの水平線との交点が であることが確かめられます。
であることが確かめられます。
演習A02-3...Flipped Classroom
図1のゲイン曲線#1を描き、3dB下がる点の座をマウスをクリックして取得し、時定数を求めるプログラムを作成せよ。
| MATLAB |
|
| SCILAB |
|
Note A02-1 状態方程式の解
●(1次自由系を表す)微分方程式

の解は

と表されます。これが解であることは元の微分方程式に代入すればすぐに確かめられ、また次のようにして導くことができます。
元の微分方程式を

と書いて、左から積分因数と呼ばれる をかけると
をかけると

すなわち

したがって、 を定数として
を定数として

ここで、とおくとは初期値 に等しいので
に等しいので

と表されます。
●(1次系の状態方程式を表す)微分方程式

の解を求めてみます。上と同様にして

までは問題ないと思います。これを から
から まで積分して
まで積分して
![\displaystyle{(10)\quad \left[e^{-at}x(t)\right]_0^{t'}=\int_0^{t'}e^{-at}bu(t)dt}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-896188914b1e908933f3cf86fd852d95_l3.png "Rendered by QuickLaTeX.com")
すなわち

したがって

ここで、 を
を に、をと置き換えれば
に、をと置き換えれば

が得られます。
Note A02-2 正弦波応答
(1次系の状態方程式を表す)微分方程式

に対して、正弦波入力

に対する解を求めます。これは公式

を用いて、次のように得られます。
![(4)\quad \begin{array}{l} \displaystyle{x(t)=\int_0^te^{a(t-\tau)}b \sin\omega\tau\,d\tau=e^{at}b\int_0^te^{-a\tau} \sin\omega\tau\,d\tau}\\ \displaystyle{=e^{at}b\left[\frac{e^{-a\tau}}{a^2+\omega^2}(-a\sin\omega\tau-\omega\cos\omega\tau)\right]_0^t}\\ \displaystyle{=\frac{e^{at}b}{a^2+\omega^2}(e^{-at}(-a\sin\omega t-\omega\cos\omega t)+\omega)}\\ \displaystyle{=\frac{b}{\sqrt{a^2+\omega^2}}(\sin\omega t\frac{-a}{\sqrt{a^2+\omega^2}}-\cos\omega t\frac{\omega}{\sqrt{a^2+\omega^2}}+e^{+at}\frac{\omega}{\sqrt{a^2+\omega^2}})}\\ \displaystyle{=\frac{b}{\sqrt{a^2+\omega^2}}(\sin\omega t\cos\theta-\cos\omega t\sin\theta+e^{+at}\sin\theta)}\\ \displaystyle{=\frac{b}{\sqrt{a^2+\omega^2}}(\sin(\omega t-\theta)+e^{+at}\sin\theta)\quad (\theta=\tan^{-1}\frac{\omega}{-a})}\\ \displaystyle{=\frac{b}{\sqrt{a^2+\omega^2}}(\sin(\omega t+\phi)-e^{+at}\sin\phi)\quad (\phi=-\theta)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ed887e5a02609da72f9c770b930e0a48_l3.png "Rendered by QuickLaTeX.com")
Note A02-3 ラプラス変換
時間関数のラプラス変換は次式によって定義されます。

Note A02-4 dB値 

 はそれぞれ時刻
はそれぞれ時刻 は実数の集合を表します。以下では状態空間表現(1)を簡単に1次系と参照します。
は実数の集合を表します。以下では状態空間表現(1)を簡単に1次系と参照します。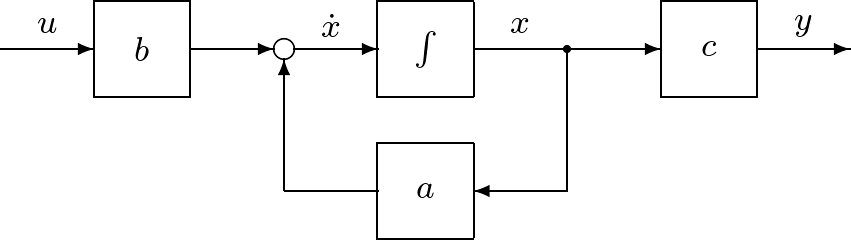

 、時刻
、時刻  、車に働く外力(制動力)を
、車に働く外力(制動力)を  とすると、車の運動方程式は次の微分方程式で与えられます。
とすると、車の運動方程式は次の微分方程式で与えられます。
 は車の加速度を表します。もし空気による抗力
は車の加速度を表します。もし空気による抗力 を考慮する場合は、車の運動方程式は次式となります。
を考慮する場合は、車の運動方程式は次式となります。
 で等速運動をしているとします。このとき加速度は零となるので
で等速運動をしているとします。このとき加速度は零となるので
 が定まります。実際には、この等速運動が何らかの原因により乱されたとき、これを速やかに元に戻すことが要求されます。そこで(3)から(4)を辺々引き算すると次式を得ます。
が定まります。実際には、この等速運動が何らかの原因により乱されたとき、これを速やかに元に戻すことが要求されます。そこで(3)から(4)を辺々引き算すると次式を得ます。
 が、平衡状態
が、平衡状態 を表していることに留意します。
を表していることに留意します。 )。いま平衡状態が乱され、時刻
)。いま平衡状態が乱され、時刻 となったとします。特に制動力を変えないとすると
となったとします。特に制動力を変えないとすると



 となり、特に制動力を変えないとすると
となり、特に制動力を変えないとすると
 ですから、漸近安定であることが確かめられます。
ですから、漸近安定であることが確かめられます。 が速度の増減によって、逆方向に働くからといえます。速度に比例する抗力を減衰力、位置に比例する抗力を復元力といいます。モノつくりにおいて、これらを内在させることをパッシブ制御、コントローラ(補償器)を用いて補うことアクティブ制御といいます。
が速度の増減によって、逆方向に働くからといえます。速度に比例する抗力を減衰力、位置に比例する抗力を復元力といいます。モノつくりにおいて、これらを内在させることをパッシブ制御、コントローラ(補償器)を用いて補うことアクティブ制御といいます。 が与えられるときの漸近安定性の判定は、なぜ
が与えられるときの漸近安定性の判定は、なぜ に基づいて行うのか説明せよ。
に基づいて行うのか説明せよ。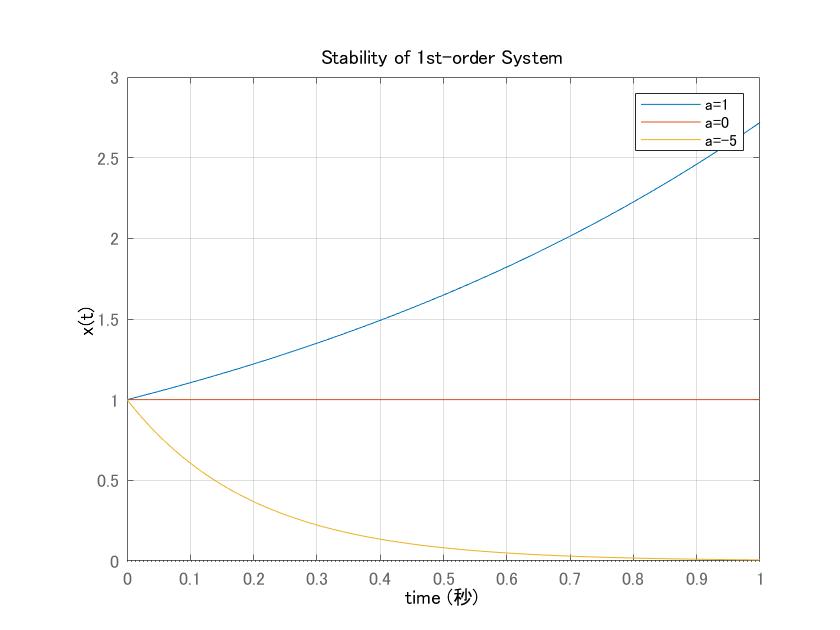 図3 どのグラフが漸近安定であるか?
図3 どのグラフが漸近安定であるか? を
を :感受性(susceptible)状態の人口(未感染者数)
:感受性(susceptible)状態の人口(未感染者数) :感染性(infectious)状態の人口(感染者数)
:感染性(infectious)状態の人口(感染者数) :回復・隔離または免疫状態(recovered/removed/immune)状態の人口(回復者数)
:回復・隔離または免疫状態(recovered/removed/immune)状態の人口(回復者数) )、これらが次の連立微分方程式に従うとします。
)、これらが次の連立微分方程式に従うとします。
 は感染率、
は感染率、 は回復率と呼ばれます。
は回復率と呼ばれます。 、感染者数
、感染者数 、回復者数
、回復者数 の当該地域の人口
の当該地域の人口


 を導入し、
を導入し、 に置き換えて、次式を得ます。
に置き換えて、次式を得ます。
 の時系列は8割削減と5割削減を適当に設定しています(
の時系列は8割削減と5割削減を適当に設定しています( は削減率と呼ばれます)。
は削減率と呼ばれます)。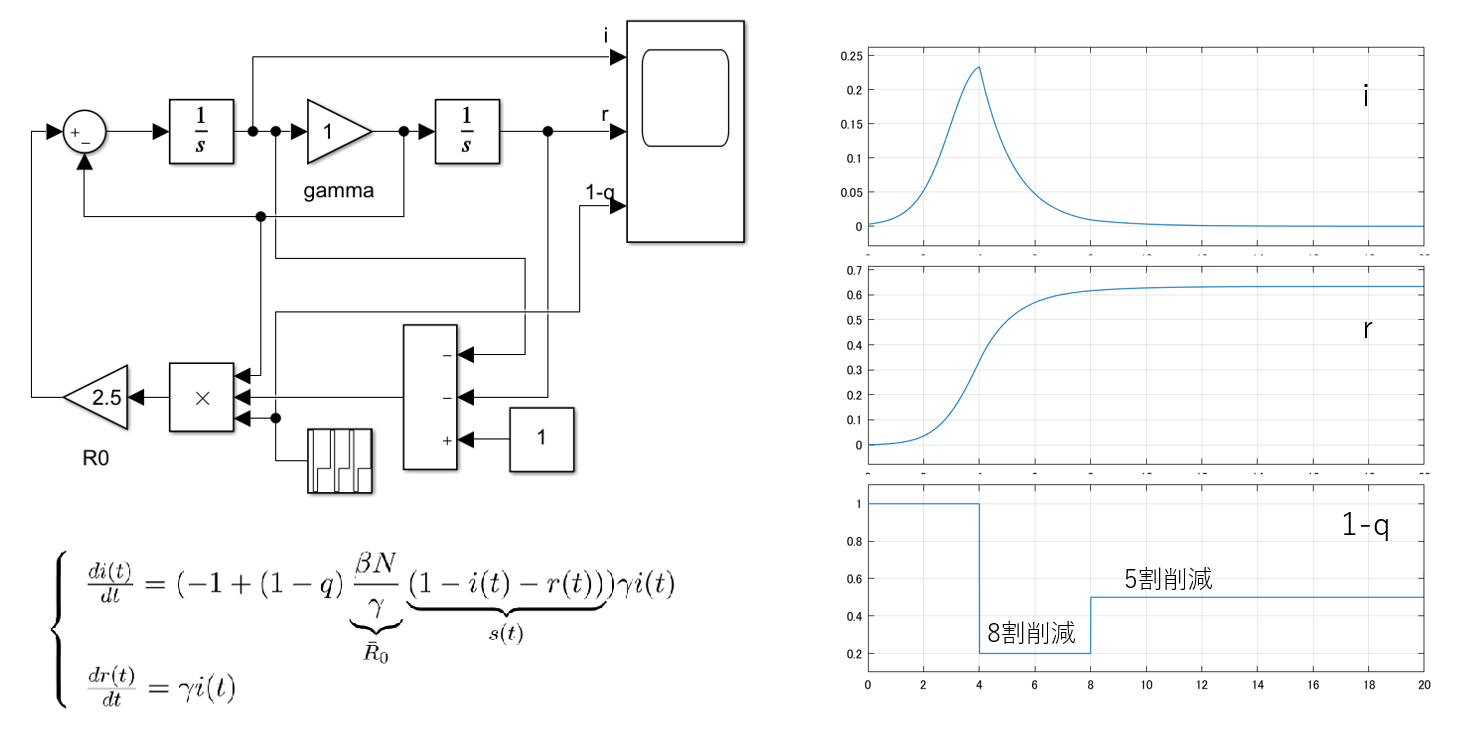 図1 正規化SIRモデルに基づく感染シミュレータの例(MATLAB/Simulink)
図1 正規化SIRモデルに基づく感染シミュレータの例(MATLAB/Simulink) ;
;  ;
;  ;
;  )
) 程度(
程度( )と推測されます。
)と推測されます。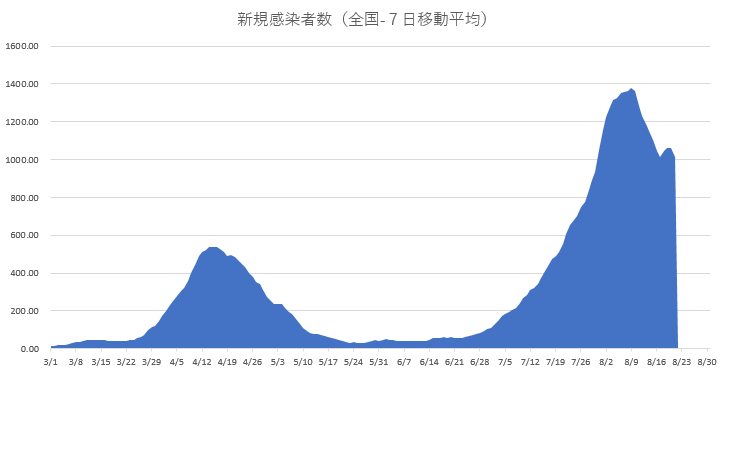 図2 全国の新規感染者数の実績値
図2 全国の新規感染者数の実績値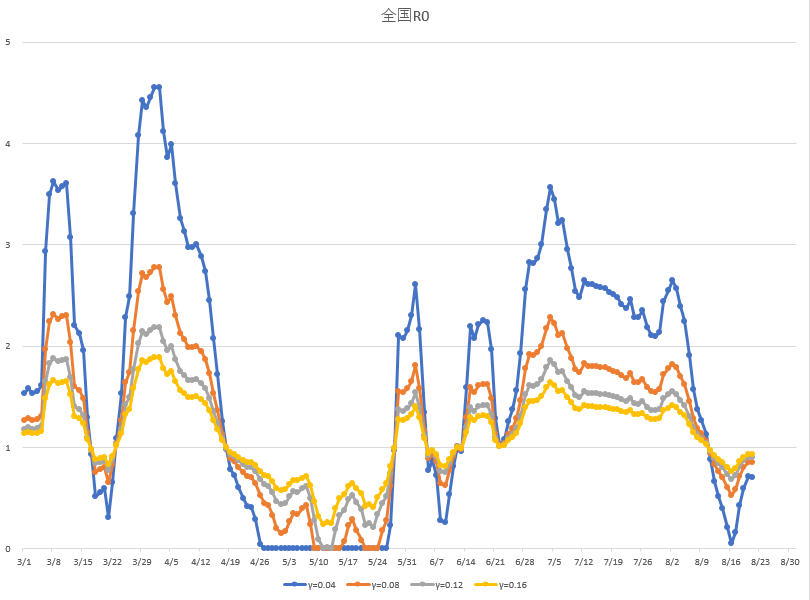 図3 全国の基本再生産数の推定値
図3 全国の基本再生産数の推定値 図4 SIRモデルに基づく全国の感染予測の例
図4 SIRモデルに基づく全国の感染予測の例![\displaystyle{(6)\quad \left[\begin{array}{c} \dot{r}(t)\\ \dot{i}(t) \end{array}\right] =\gamma\left[\begin{array}{cc} 0 & 1\\ 0 & -1+(1-q(t))\bar{R}_0s(t) \end{array}\right] \left[\begin{array}{c} r(t)\\ i(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1c93907935b8739662e1547e5be8182e_l3.png "Rendered by QuickLaTeX.com")
 を導入します。
を導入します。![\displaystyle{(7)\quad \left\{\begin{array}{l} \left[\begin{array}{c} \dot{r}(t)\\ \dot{i}(t) \end{array}\right] =\left[\begin{array}{cc} 0 & \gamma\\ 0 & -\gamma+\gamma\bar{R}_0s(t) \end{array}\right] \left[\begin{array}{c} r(t)\\ i(t) \end{array}\right] +\left[\begin{array}{c} 0\\ -\gamma\bar{R}_0s(t)i(t) \end{array}\right]q(t)\\ \dot{q}(t)=-\frac{1}{T_q}q(t)+\frac{1}{T_q}u_q(t) \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-14aee197f47f96f675df41632b68be6f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(8)\quad \left[\begin{array}{c} \dot{r}(t)\\ \dot{i}(t)\\ \dot{q}(t) \end{array}\right] =\left[\begin{array}{ccc} 0 & \gamma &0\\ 0 & -\gamma+\gamma\bar{R}_0s(t)&-\gamma\bar{R}_0s(t)i(t)\\ 0 & 0 &-\frac{1}{T_q} \end{array}\right] \left[\begin{array}{c} r(t)\\ i(t)\\ q(t) \end{array}\right] +\left[\begin{array}{c} 0\\ 0\\ \frac{1}{T_q} \end{array}\right]u_q(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-599186a53ae0fd423974aadc4f4e2e1c_l3.png "Rendered by QuickLaTeX.com")
 と
と をもつ、次のようなLPVモデル(線形パラメータ変動モデル)とみなすことができます。
をもつ、次のようなLPVモデル(線形パラメータ変動モデル)とみなすことができます。![\displaystyle{(9)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} \dot{r}(t)\\ \dot{i}(t)\\ \dot{q}(t) \end{array}\right] }_{\dot{x}(t)} =\left(\underbrace{\left[\begin{array}{ccc} 0 & \gamma &0\\ 0 & -\gamma &0\\ 0 & 0 &-\frac{1}{T_q} \end{array}\right] }_{A_0} + \underbrace{\bar{R}_0s(t)}_{\alpha(t)} \underbrace{\left[\begin{array}{ccc} 0 & 0 & 0\\ 0 & \gamma & 0\\ 0 & 0 & 0 \end{array}\right] }_{A_1} \right.\\ \left.+ \underbrace{\bar{R}_0s(t)i(t)}_{\beta(t)} \underbrace{\left[\begin{array}{ccc} 0 & 0 & 0\\ 0 & 0 & -\gamma\\ 0 & 0 & 0 \end{array}\right] }_{A_2} \right) \underbrace{\left[\begin{array}{c} r(t)\\ i(t)\\ q(t) \end{array}\right] }_{x(t)} +\underbrace{\left[\begin{array}{c} 0\\ 0\\ \frac{1}{T_q} \end{array}\right] }_{B} \underbrace{u_q(t)}_{u(t)}\\ (0<\alpha(t),\beta(t)<\bar{R}_0) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a5d3c6f02f52ebb8fdc356bc6130e012_l3.png "Rendered by QuickLaTeX.com")
 と
と に固定すると、次のLTIモデル(線形時不変モデル)を得ます。
に固定すると、次のLTIモデル(線形時不変モデル)を得ます。![\displaystyle{(10)\quad \left[\begin{array}{c} \dot{r}(t)\\ \dot{i}(t)\\ \dot{q}(t) \end{array}\right] =\left[\begin{array}{ccc} 0 & \gamma &0\\ 0 & -\gamma+\gamma\alpha^* & -\gamma\beta^*\\ 0 & 0 &-\frac{1}{T_q} \end{array}\right] \left[\begin{array}{c} r(t)\\ i(t)\\ q(t) \end{array}\right] +\left[\begin{array}{c} 0\\ 0\\ \frac{1}{T_q} \end{array}\right]u_q(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e35e3ccf84dd4c6426f8672cff7da4e3_l3.png "Rendered by QuickLaTeX.com")


 以降、LQ制御則を適用しています。ここで、
以降、LQ制御則を適用しています。ここで、 、
、 、
、 としています。時刻
としています。時刻 図5 正規化SIRモデルに基づく感染制御(LQ制御)の例
図5 正規化SIRモデルに基づく感染制御(LQ制御)の例 、
、 に対する次の内分式に注目します。
に対する次の内分式に注目します。![\displaystyle{(13)\quad \begin{array}{l} \left[\begin{array}{c} \alpha(t)\\ \beta(t) \end{array}\right]= \underbrace{\frac{\alpha_2-\alpha(t)}{\alpha_2-\alpha_1}\frac{\beta_2-\beta(t)}{\beta_2-\beta_1}}_{p_{11}(\alpha(t),\beta(t))}\left[\begin{array}{c} \alpha_1\\ \beta_1 \end{array}\right]+ \underbrace{\frac{\alpha_2-\alpha(t)}{\alpha_2-\alpha_1}\frac{\beta(t)-\beta_1}{\beta_2-\beta_1}}_{p_{12}(\alpha(t),\beta(t))}\left[\begin{array}{c} \alpha_1\\ \beta_2 \end{array}\right]\\+ \underbrace{\frac{\alpha(t)-\alpha_1}{\alpha_2-\alpha_1}\frac{\beta_2-\beta(t)}{\beta_2-\beta_1}}_{p_{21}(\alpha(t),\beta(t))}\left[\begin{array}{c} \alpha_2\\ \beta_1 \end{array}\right]+ \underbrace{\frac{\alpha(t)-\alpha_1}{\alpha_2-\alpha_1}\frac{\beta(t)-\beta_1}{\beta_2-\beta_1}}_{p_{22}(\alpha(t),\beta(t))}\left[\begin{array}{c} \alpha_2\\ \beta_2 \end{array}\right] \\ \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6797abe598ebb6bc452731852b36f1c2_l3.png "Rendered by QuickLaTeX.com")


 によって重み付けして、次式のように表されます。
によって重み付けして、次式のように表されます。


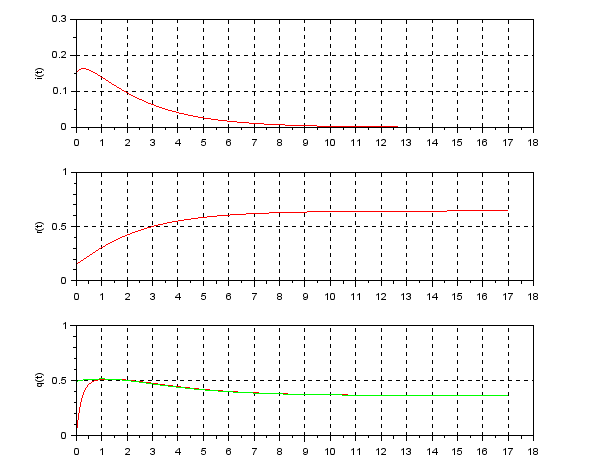 図6 正規化SIRモデルに基づく感染制御(LPV制御)の例
図6 正規化SIRモデルに基づく感染制御(LPV制御)の例 )。
)。 :未検査感染性人口(市中感染者数)
:未検査感染性人口(市中感染者数) :検査後隔離状態にある感染性人口(隔離感染者数)
:検査後隔離状態にある感染性人口(隔離感染者数)
 も導入されていることに注意してください。
も導入されていることに注意してください。 が日々発表される感染者数となります。
が日々発表される感染者数となります。


 図7 正規化SIQRモデルに基づく感染シミュレータの例(MATLAB/Simulink)
図7 正規化SIQRモデルに基づく感染シミュレータの例(MATLAB/Simulink) )
)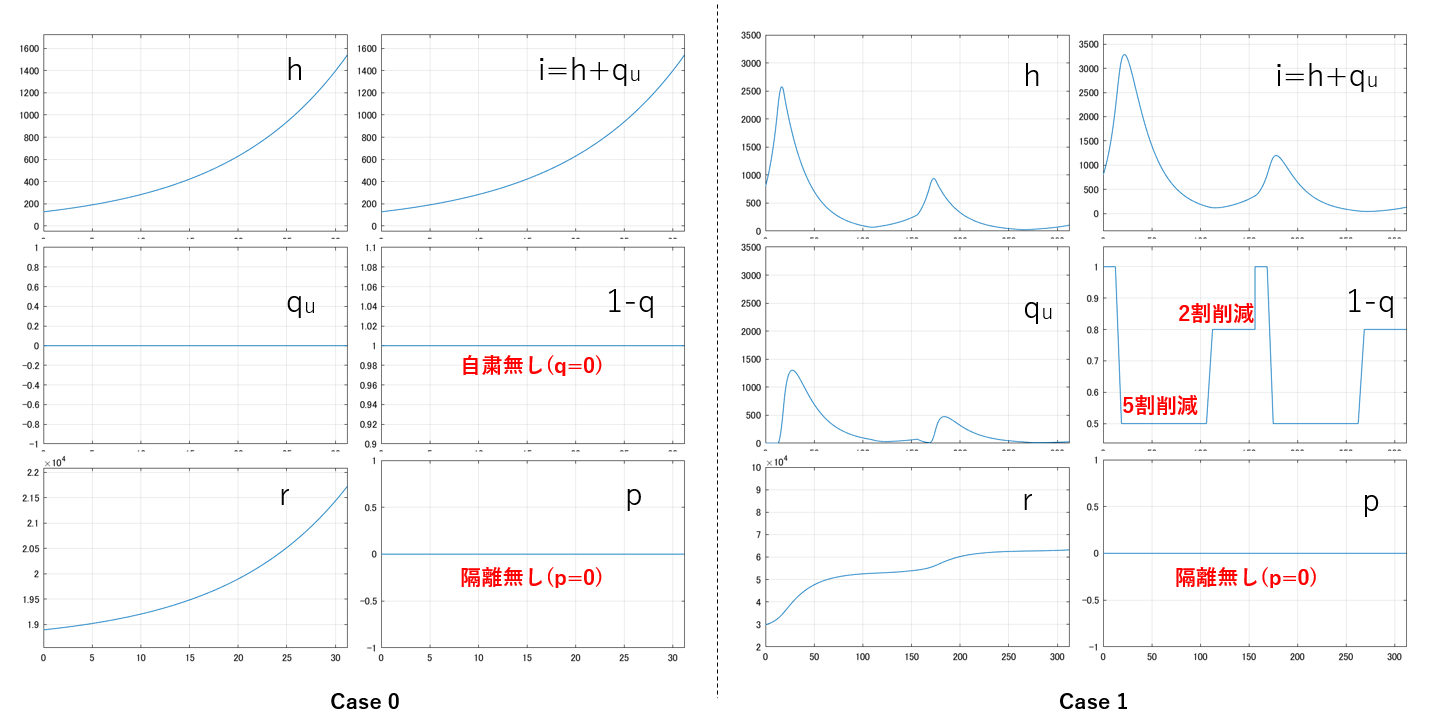
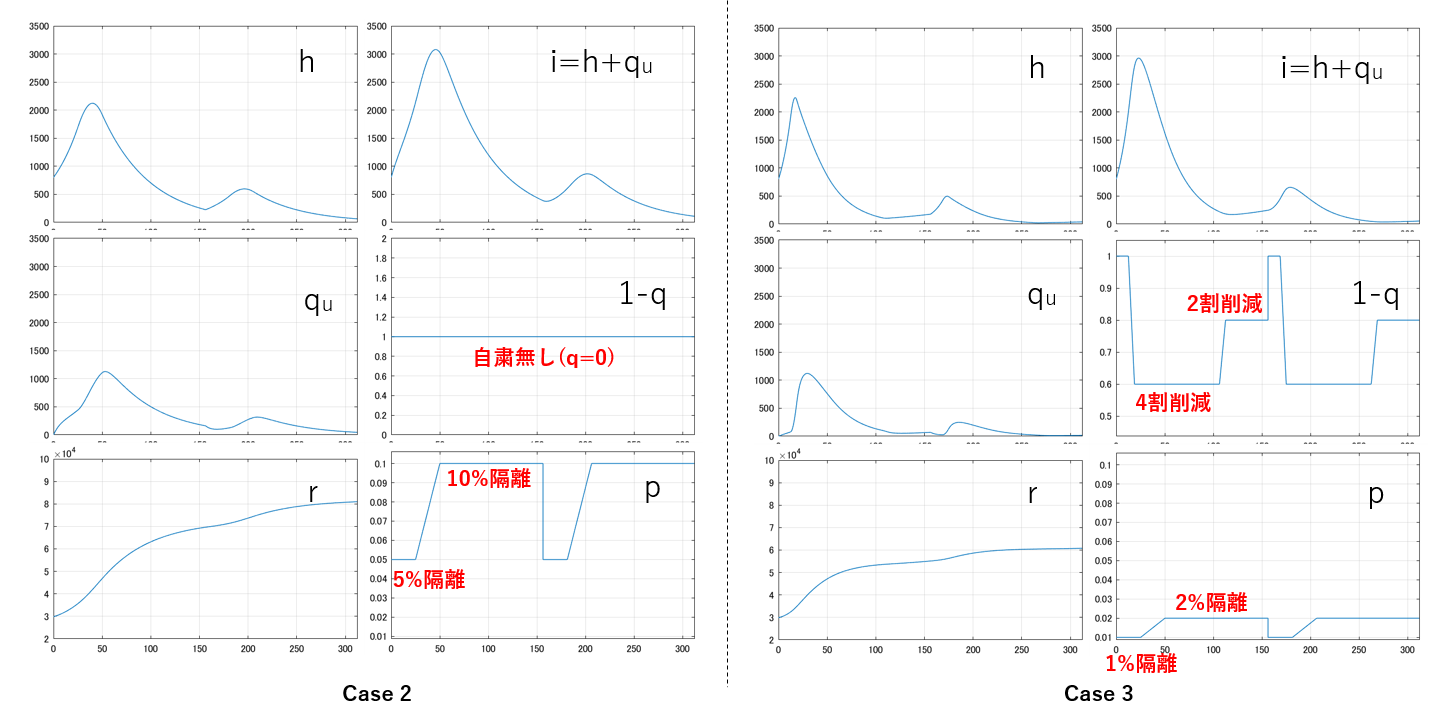 図8 SIQRモデルに基づく全国の感染予測シミュレーション
図8 SIQRモデルに基づく全国の感染予測シミュレーション![(105)\quad\left[\begin{array}{c} \dot{r}(t)\\ \dot{h}(t)\\ \dot{q}_u(t) \end{array}\right] =\gamma\left[\begin{array}{ccc} 0 & 1 & 1\\ 0 & -1-\frac{p}{\gamma}+(1-q)\bar{R}_0s(t) & 0\\ 0 & \frac{p}{\gamma}+q\bar{R}_0s(t) & -1\\ \end{array}\right] \left[\begin{array}{c} r(t)\\ h(t)\\ q_u(t) \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-db1ac33e01f59035ea86270b3529f440_l3.png "Rendered by QuickLaTeX.com")
 を導入します。
を導入します。![(106)\quad\left\{\begin{array}{l} \left[\begin{array}{c} \dot{r}(t)\\ \dot{h}(t)\\ \dot{q}_u(t) \end{array}\right] =\left[\begin{array}{ccc} 0 & \gamma & \gamma\\ 0 & -\gamma+\gamma\bar{R}_0s(t) & 0\\ 0 & 0 & -\gamma\\ \end{array}\right] \left[\begin{array}{c} r(t)\\ h(t)\\ q_u(t) \end{array}\right]\\+ \left[\begin{array}{cc} 0 & 0\\ -\gamma\bar{R}_0s(t)h(t) & -1\\ \gamma\bar{R}_0s(t)h(t) & 1 \end{array}\right] \left[\begin{array}{c} q(t) \\ p(t) \end{array}\right]\\ \dot{q}(t)=-\frac{1}{T_q}q(t)+\frac{1}{T_q}u_q(t)\\ \dot{p}(t)=-\frac{1}{T_p}p(t)+\frac{1}{T_p}u_p(t) \end{array}\right.](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9171c7eb1ca480b4f202740f76c42ee8_l3.png "Rendered by QuickLaTeX.com")
![(107)\quad\begin{array}{l} \left[\begin{array}{c} \dot{r}(t)\\ \dot{h}(t)\\ \dot{q}_u(t)\\ \dot{q}(t)\\ \dot{p}(t) \end{array}\right] =\left[\begin{array}{ccccc} 0 & \gamma & \gamma&0 & 0\\ 0 & -\gamma+\gamma\bar{R}_0s(t) & 0&-\gamma\bar{R}_0s(t)h(t) & -1\\ 0 & 0 & -\gamma&\gamma\bar{R}_0s(t)h(t) & 1\\ 0&0&0&-\frac{1}{T_q}&0\\ 0&0&0&0&-\frac{1}{T_p} \end{array}\right] \left[\begin{array}{c} r(t)\\ h(t)\\ q_u(t)\\ q(t) \\ p(t) \end{array}\right]\\ +\left[\begin{array}{cc} 0&0\\ 0&0\\ 0&0\\ \frac{1}{T_q}&0\\ 0&\frac{1}{T_p} \end{array}\right] \left[\begin{array}{c} u_q(t) \\ u_p(t) \end{array}\right] \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-190fa600994dfc8bd7838ca320ee151f_l3.png "Rendered by QuickLaTeX.com")
 をもつ次のようなLPVモデル(線形パラメータ変動モデル)とみなすことができます。
をもつ次のようなLPVモデル(線形パラメータ変動モデル)とみなすことができます。
 は基本再生産数と呼ばれています。自粛をしていない場合は削減率
は基本再生産数と呼ばれています。自粛をしていない場合は削減率 なので次式となります。
なので次式となります。
 で表すと、これに隔離率
で表すと、これに隔離率 が日々報告される感染者数となります。したがって、日々報告される感染者数を
が日々報告される感染者数となります。したがって、日々報告される感染者数を
 を1.5, 2.0, 2.5, 3.0の4通り、
を1.5, 2.0, 2.5, 3.0の4通り、 通りについて、
通りについて、 の値を計算したものを、表1の左側に示します(負値を与える組合せはすでに収束に向かっていることを意味します)。また対応する
の値を計算したものを、表1の左側に示します(負値を与える組合せはすでに収束に向かっていることを意味します)。また対応する を表1の左側に示します。これは検査拡大率を意味します。その棒グラフを描いた図1から次が分かります。
を表1の左側に示します。これは検査拡大率を意味します。その棒グラフを描いた図1から次が分かります。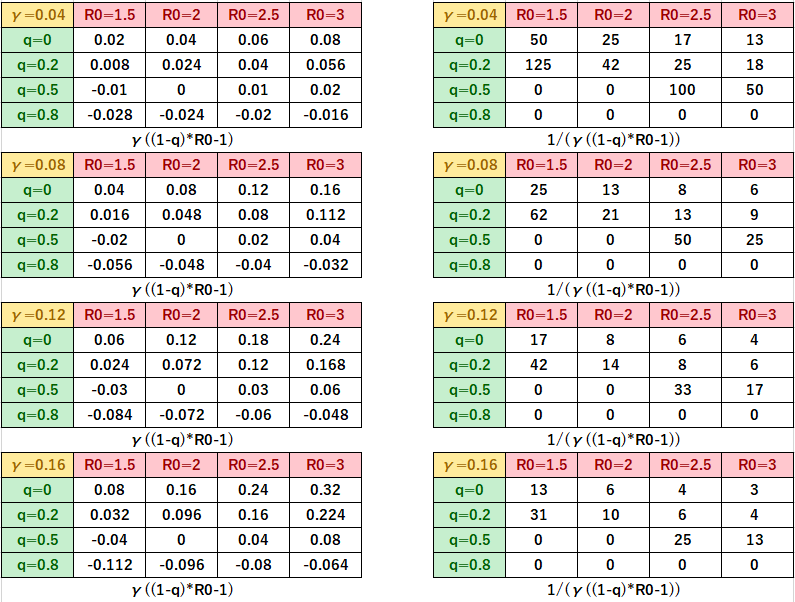 表1
表1 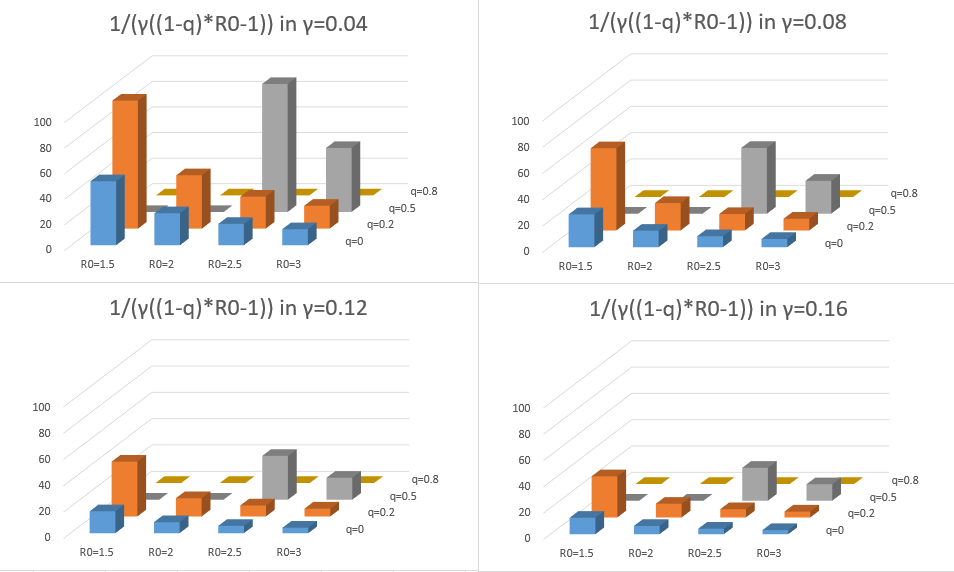 図1 表1の
図1 表1の 、
、 と読み取ることができ、(7)は次式となります。
と読み取ることができ、(7)は次式となります。
 図3 全国の新規感染者数の実績値
図3 全国の新規感染者数の実績値 図4 全国の基本再生産数の推定値
図4 全国の基本再生産数の推定値 の値を図3に示します。これから7/25時点での
の値を図3に示します。これから7/25時点での

 で表します。感染前の自明な平衡状態は
で表します。感染前の自明な平衡状態は
 だけ現れ
だけ現れ
 として
として

 の正負によって、感染流行か感染収束かが決まります。これを
の正負によって、感染流行か感染収束かが決まります。これを

 のとき感染流行
のとき感染流行 のとき感染収束
のとき感染収束
 )、(2)の第2式は
)、(2)の第2式は

 の5~10倍の時間が経てば、感染者数
の5~10倍の時間が経てば、感染者数 は1人が単位時間に2次感染させる人数、これに感染性時間
は1人が単位時間に2次感染させる人数、これに感染性時間

 次式を用いて時刻
次式を用いて時刻
 としています。
としています。 の4通りを試し、
の4通りを試し、 となる場合は0としています。
となる場合は0としています。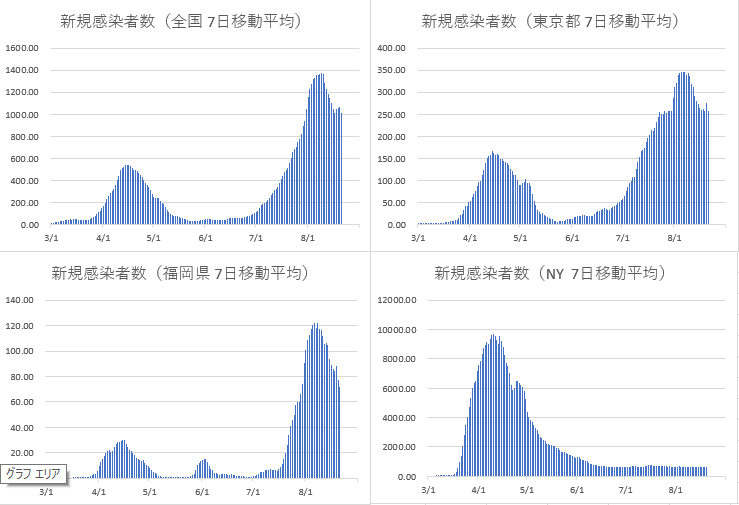 図1 感染者数の実データ(移動平均後)
図1 感染者数の実データ(移動平均後) 図2 基本再生産数
図2 基本再生産数 ,
, 
 ,
, 
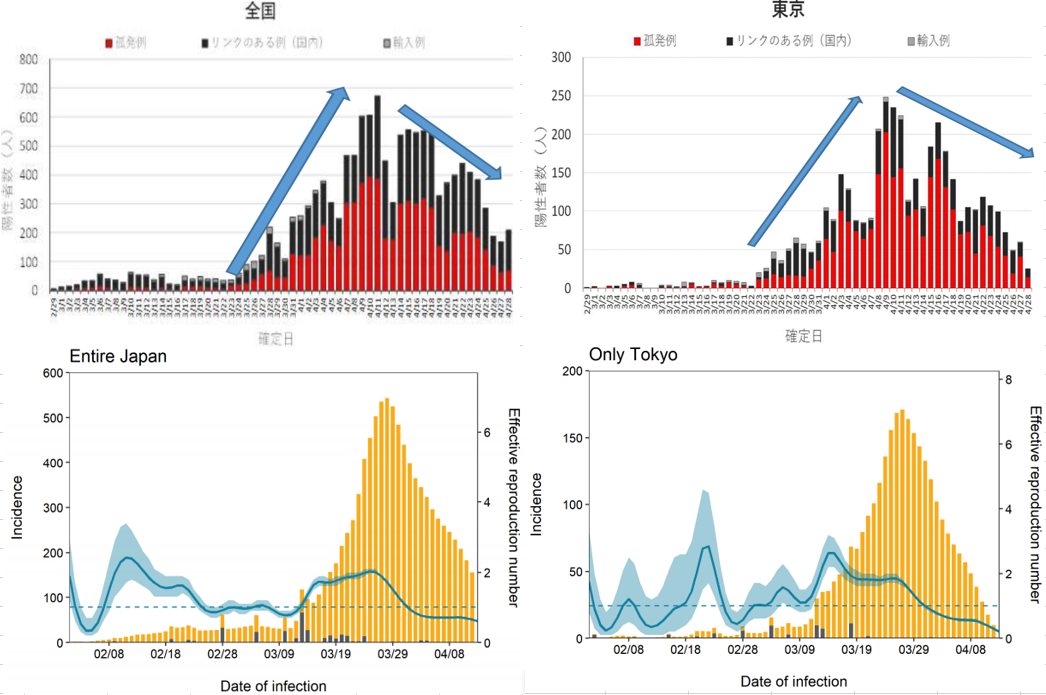 図3 専門家会議資料における実効再生産数の推定
図3 専門家会議資料における実効再生産数の推定 です。しかしこれでは直近で
です。しかしこれでは直近で では常に正でした)。回復率の逆数は感染性時間
では常に正でした)。回復率の逆数は感染性時間 ,
, ,
, ,
, ,
, ,
, です。指数関数的に減衰する場合は、初期値の10%まで減衰する期間は
です。指数関数的に減衰する場合は、初期値の10%まで減衰する期間は 、2%まで減衰する期間は
、2%まで減衰する期間は ですから、たとえば、
ですから、たとえば、 でもそうおかしくはないかと思います。
でもそうおかしくはないかと思います。




 とおいて、次式を得ます。
とおいて、次式を得ます。

 が成り立ち、
が成り立ち、 です。以下では、
です。以下では、 ,
, ,
, ,
, はそれぞれ
はそれぞれ ,
, ,
, ,
, として、離散時間の差分方程式として表すべきかもしれませんが、以下では上式を用います。
として、離散時間の差分方程式として表すべきかもしれませんが、以下では上式を用います。 のとき、基本再生産数
のとき、基本再生産数 図4 基本再生産数
図4 基本再生産数 であるとし、ある時点からこれを
であるとし、ある時点からこれを に低減したとき、感染者数がどのように変化するかを示しています(
に低減したとき、感染者数がどのように変化するかを示しています( のときが8割低減、
のときが8割低減、 のときが2割低減です。
のときが2割低減です。 図5 基本再生産数
図5 基本再生産数 とします。またパラメータ
とします。またパラメータ における値を
における値を とします。このとき評価関数
とします。このとき評価関数
 を、数値最適化の手法を用いて求めます。
を、数値最適化の手法を用いて求めます。 図6 日本における感染者数の推移
図6 日本における感染者数の推移 図7 日本における累積感染者数の推移
図7 日本における累積感染者数の推移 、以後
、以後 とします。一方、SIRモデル(20)の解も
とします。一方、SIRモデル(20)の解も において求めます。この方法で感染初期の指数関数的増大の様子をよく捉えることができます。一方、4/11放映のNHKスペシャルより、基本再生産数
において求めます。この方法で感染初期の指数関数的増大の様子をよく捉えることができます。一方、4/11放映のNHKスペシャルより、基本再生産数 と考えられるので、(9)より
と考えられるので、(9)より を求めると
を求めると
 を用いて
を用いて

 式を、SIRi、SIQRiと参照します。
式を、SIRi、SIQRiと参照します。 の影響はないとしたものです。
の影響はないとしたものです。 については
については

 は
は

 に代わっており、基本再生産数が小さくなっています。したがって、SIQRモデルによれば、隔離率
に代わっており、基本再生産数が小さくなっています。したがって、SIQRモデルによれば、隔離率
 の10%まで下がる時間は(
の10%まで下がる時間は( に注意して)
に注意して)

 ⇒ 収束期間31日
⇒ 収束期間31日 ⇒ 収束期間23日
⇒ 収束期間23日 ⇒ 収束期間18日
⇒ 収束期間18日 ⇒ 収束期間8日
⇒ 収束期間8日 ⇒ 収束期間14日
⇒ 収束期間14日 、
、 、
、



 であることが確かめられます。また、回復率としては
であることが確かめられます。また、回復率としては が採用されています。さらに、感染減少期間に入る前の感染頂上期間では
が採用されています。さらに、感染減少期間に入る前の感染頂上期間では となるように、隔離率
となるように、隔離率 が定められています。このように、感染者数データから隔離率
が定められています。このように、感染者数データから隔離率 倍して市中感染者数を推定できるという意味で大変興味深いと思います。
倍して市中感染者数を推定できるという意味で大変興味深いと思います。



 、隔離率
、隔離率 、
、 が分かります。これらを用いると次の計算結果を得ます。
が分かります。これらを用いると次の計算結果を得ます。 ⇒ 収束期間30日
⇒ 収束期間30日 ⇒ 収束期間22日
⇒ 収束期間22日 ⇒ 収束期間18日
⇒ 収束期間18日 ⇒ 収束期間9日
⇒ 収束期間9日 ⇒ 収束期間15日
⇒ 収束期間15日 図4 基本再生産数
図4 基本再生産数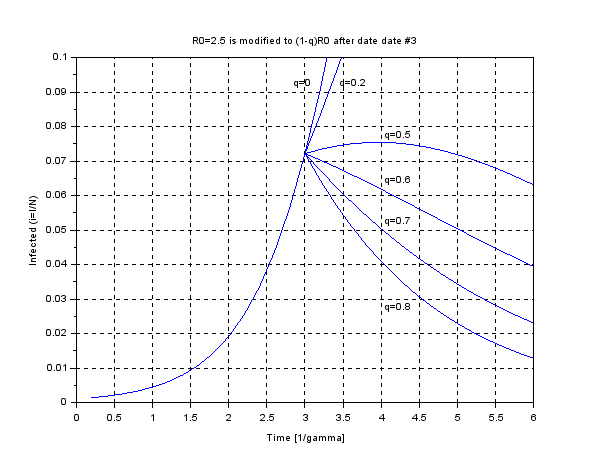 図5 基本再生産数
図5 基本再生産数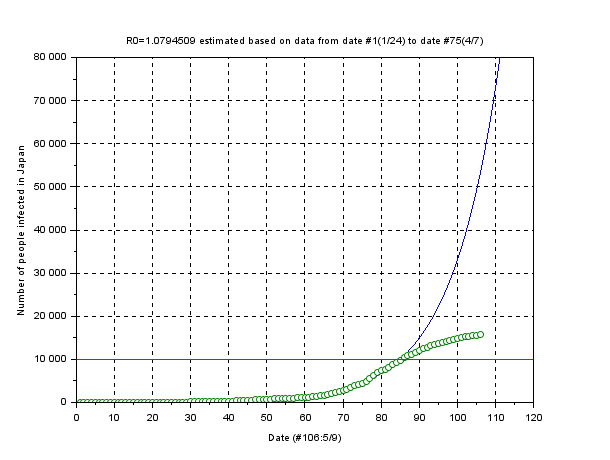 図7 日本における累積感染者数の推移
図7 日本における累積感染者数の推移
![\displaystyle{ \left[\begin{array}{cc|cc} M_{qq}+M_{qq}^a & M_{qp} & 0 & 0\\ M_{pq} & M_{pp}+M_{pp}^b & 0 & 0\\\hline -c_0 I_N & 0 & I_N & 0\\ 0 & -d_0 I_N & 0 & I_N \end{array}\right] \left[\begin{array}{c} \ddot{q} \\ \ddot{p} \\\hline \ddot{q}_a \\ \ddot{p}_b \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-da29b61b58b682d19c3dc1f222b03cc6_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{+\left[\begin{array}{cc|cc} D_{qq}+D_{qq}^a & D_{qp} & 0 & 0\\ D_{pq} & D_{pp}+D_{qq}^b & 0 & 0\\\hline 0 & 0 & {\cal D}_{qq}^a & 0 \\ 0 & 0 & 0 & {\cal D}_{pp}^b \end{array}\right] \left[\begin{array}{c} \dot{q} \\ \dot{p} \\\hline \dot{q}_a \\ \dot{p}_b \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-67aa206323acba4f60e32f70d9550e82_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ +\left[\begin{array}{cc|cc} K_{qq} & 0 & -K_{q_aq_a} & -K_{q_ap_b} \\ 0 & K_{pp} & -K_{p_bq_a} & -K_{p_bp_b} \\\hline 0 & 0 & c_2 I_N & 0\\ 0 & 0 & 0 & d_2 I_N \end{array}\right] \left[ \begin{array}{c} q \\ p \\\hline q_a \\ p_b \end{array} \right] = \left[\begin{array}{c} f_1 \\ 0 \\\hline 0\\ 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9801e10e2c79389674c4ce064923e0b3_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{M_{qq}+M_{qq}^a=[m^y_{ij} + \displaystyle\sum_{l,k=1}^NF^y_{ilkj}q_lq_k]_{i,j=1,\cdots,N}+\chi_2I_N}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-484a4ed46e0dafeb473af331951ae59d_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{M_{qp}=[\displaystyle\sum_{l,k=1}^N N^y_{ilkj} q_l p_k]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6750ab8db4c9541c92856c4cc319e034_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{M_{pq}=[\displaystyle\sum_{l,k=1}^N N^z_{ilkj} p_l q_k]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d1be65df645506de42be0ba230166dae_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{M_{pp}+M_{qq}^b=[m^z_{ij} + \displaystyle\sum_{l,k=1}^NF^z_{ilkj}p_lp_k]_{i,j=1,\cdots,N}+\chi_2I_N}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-af087419a1c72dbe9294f4bb04b782fc_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{D_{qq}+D_{qq}^a=[c^y_{ij} +\chi_3\sum_{j=1}^N\int_0^1|v-\dot{\eta}|\phi_i\phi_jd\xi + \displaystyle\sum_{l,k=1}^ND^y_{ilkj}q_lq_k+ \sum_{l,k=1}^NE^y_{ilkj}q_l\dot{q}_k]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-56c77e9f02100bf1edad77915dfeee0c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{D_{qp}=[\displaystyle\sum_{l,k=1}^NL^y_{ilkj}q_lp_k+\displaystyle\sum_{l,k=1}^NM^y_{ilkj}q_l\dot{p}_k]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f6f94a2bdaf292ff0093f65bc300008d_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{D_{pq}=[\displaystyle\sum_{l,k=1}^NL^z_{ilkj}p_lq_k+\displaystyle\sum_{l,k=1}^NM^z_{ilkj}p_l\dot{q}_k]_{i,j=1,\cdots,N} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8ba846dda9b4e1a20fd16e8372ee42dc_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{D_{pp}+D_{qq}^b=[c^z_{ij} +\chi_3\sum_{j=1}^N\int_0^1|\dot{\eta}|\psi_i\psi_jd\xi + \displaystyle\sum_{l,k=1}^ND^z_{ilkj}p_lp_k+ \displaystyle\sum_{l,k=1}^NE^z_{ilkj}p_l\dot{p}_k]_{i,j=1,\cdots,N} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4163534d68aaad1e5c97399979488237_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{{\cal D}_{qq}^a=[c_1\displaystyle\sum_{l,k=1}^NS^y_{ijkl}q_{ak}q_{al}]_{i,j=1,\cdots,N}-c_1I_N}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-43ce9264c264e937f29b5242717b7b5c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{{\cal D}_{pp}^b=[d_1\displaystyle\sum_{l,k=1}^NS^z_{ijkl}p_{bk}p_{bl}]_{i,j=1,\cdots,N}-d_1I_N}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d57a70fb955339e4d56e602a8eb94956_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{K_{qq}=[k^y_{ij} + \displaystyle\sum_{l,k=1}^NB^y_{ilkj}q_kq_l+ \displaystyle\sum_{l,k=1}^NH^y_{ilkj}p_kp_l]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-040d1c3fd7a13639a6bdd6969cb3e672_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{K_{pp}=[k^z_{ij} + \displaystyle\sum_{l,k=1}^NB^z_{ilkj}p_kp_l+ \displaystyle\sum_{l,k=1}^NH^z_{ilkj}q_kq_l]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ef8cb395af4a7622a53810a8bebb9a74_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{K_{q_aq_a}=[\chi_4 \displaystyle\sum_{l,k=1}^NS^y_{ijkl}q_{vk}q_{vl}]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-80451502f16041f0bbac06fddc8c23c5_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{K_{q_ap_b}=[-\chi_5 \displaystyle\sum_{l,k=1}^NS^y_{ijkl}q_{vk}\dot{q}_{l}]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-98e603dd8e3c36879741d03b57b38686_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{K_{p_bq_a}=[\chi_4 \displaystyle\sum_{l,k=1}^NS^z_{ijkl}p_{vk}p_{vl}]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4205b24c7abafe265267f45c15fd55e5_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{K_{p_bp_b}=[\chi_5 \displaystyle\sum_{l,k=1}^NS^z_{ijkl}p_{vk}\dot{p}_{l}]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-62eb249d80c1f756ba7c6165efddfe27_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{f_1=[\chi_3\int_0^1|v-\dot{\eta}|\phi_iv_id\xi]_{i=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ddec26b5108e035cb562ffca33c0755b_l3.png "Rendered by QuickLaTeX.com")





















































![\displaystyle{\left[\begin{array}{cc} M_{qq} & M_{qp} \\ M_{pq} & M_{pp} \\ \end{array}\right] \left[\begin{array}{c} \ddot{q} \\ \ddot{p} \end{array}\right] +\left[\begin{array}{cc} D_{qq} & D_{qp} \\ D_{pq} & D_{pp} \\ \end{array}\right] \left[\begin{array}{c} \dot{q} \\ \dot{p} \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-20d4f20d2b30e087f9e91d8e23138fb8_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ +\left[\begin{array}{cc} K_{qq} & K_{qp} \\ K_{pq} & K_{pp} \\ \end{array}\right] \left[ \begin{array}{c} q \\ p \end{array} \right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-fd738fa254964090db6c2b2d5068a313_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{{= \left[\begin{array}{c} \int_0^1\phi(\xi)\frac{L^3}{EI} f_yd\xi \\ \int_0^1\psi(\xi)\frac{L^3}{EI} f_zd\xi \end{array}\right] }}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f3d6e1f672e4ba90ae9b31c279a8532e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ V_R(s,t)= \left[\begin{array}{c} V(s,t)-\dot{y}(s,t)\\ -\dot{z}(s,t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b53456962231d6d73be84f117da81328_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{ \left[\begin{array}{c} f_y(s,t) \\ f_z(s,t) \end{array}\right] =-C_a\rho_eA_e \left[\begin{array}{c} \ddot{y}(s,t) \\ \ddot{z}(s,t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-39d930c3e39fca5c2999c481e72eb72f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ +C_{Ds}\cdot\frac{1}{2}\rho_eD_e||V_R(s,t)|| \left[\begin{array}{cc} V(s,t)-\dot{y}(s,t) \\ -\dot{z}(s,t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2a23db067a61849c3d65837fbf755047_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{+ \frac{1}{||V_R(s,t)||} \left[\begin{array}{cc} V(s,t)-\dot{y}(s,t) & \dot{z}(s,t)\\ -\dot{z}(s,t)& V(s,t)-\dot{y}(s,t) \end{array}\right] \left[\begin{array}{c} f_{Dv}(s,t) \\ f_{L}(s,t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-094d9b2056c3fd3f232a1d792b2bb1ff_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} f_{Dv}(s,t) \\ f_{L}(s,t) \end{array}\right] = \frac{1}{2}\rho_eD_e||V_R(s,t)||^2 \left[\begin{array}{c} \frac{1}{2}C_{D0}a(s,t) \\ \frac{1}{2}C_{L0}b(s,t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3c2f41e06be89e4f2ad40b614ec6cf7f_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{ \frac{1}{||V_R(s,t)||} \left[\begin{array}{cc} V(s,t)-\dot{y}(s,t) & \dot{z}(s,t)\\ -\dot{z}(s,t)& V(s,t)-\dot{y}(s,t) \end{array}\right] \simeq \left[\begin{array}{cc} 1 & \frac{\dot{z}(s,t)}{V(s,t)}\\ -\frac{\dot{z}(s,t)}{V(s,t)} & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c69265b2242275612eaa865f4b447916_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{+C_{Ds}\cdot\frac{1}{2}\rho_eD_e \left[\begin{array}{c} |V(s,t)-\dot{y}(s,t)|(V(s,t)-\dot{y}(s,t)) \\ -|\dot{z}(s,t)|\dot{z}(s,t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-146c60502c2df9bcd6bde388526ed439_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{+ \left[\begin{array}{cc} 1 & \frac{\dot{z}(s,t)}{V(s,t)}\\ -\frac{\dot{z}(s,t)}{V(s,t)} & 1 \end{array}\right] \left[\begin{array}{c} f_{Dv}(s,t) \\ f_{L}(s,t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ab809214cf2b562459cd95b425f12869_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} f_{Dv}(s,t) \\ f_{L}(s,t) \end{array}\right] = \frac{1}{2}\rho_eD_eV^2(s,t) \left[\begin{array}{c} \frac{1}{2}C_{D0}a(s,t) \\ \frac{1}{2}C_{L0}b(s,t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7c3a90ddac8ecea093359431624a5084_l3.png "Rendered by QuickLaTeX.com")



![\displaystyle{ q_a(\tau)= \left[\begin{array}{c} q_{a1}(\tau) \\ \vdots\\ q_{aN}(\tau) \\ \end{array}\right],\ \phi(\xi)= \left[\begin{array}{c} \phi_1(\xi) \\ \vdots\\ \phi_N(\xi) \\ \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b30c392ff6c724f4b08c8d7b9827ec3b_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{ p_b(\tau)= \left[\begin{array}{c} p_{b1}(\tau) \\ \vdots\\ p_{bN}(\tau) \\ \end{array}\right],\ \psi(\xi)= \left[\begin{array}{c} \psi_1(\xi) \\ \vdots\\ \psi_N(\xi) \\ \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2e4c15f6fa252b068e0f71555339a0a5_l3.png "Rendered by QuickLaTeX.com")



























































![\displaystyle{ \left[\begin{array}{cc} M_{qq}+M_{qq}^a & M_{qp} \\ M_{pq} & M_{pp}+M_{pp}^b \\ \end{array}\right] \left[\begin{array}{c} \ddot{q} \\ \ddot{p} \end{array}\right] +\left[\begin{array}{cc} D_{qq}+D_{qq}^a & D_{qp} \\ D_{pq} & D_{pp}+D_{qq}^b \\ \end{array}\right] \left[\begin{array}{c} \dot{q} \\ \dot{p} \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1b8f19ea89f0a9387dd28a08e12961f6_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ +\left[\begin{array}{cc} K_{qq} & 0 \\ 0 & K_{pp} \\ \end{array}\right] \left[ \begin{array}{c} q \\ p \end{array} \right] = \left[\begin{array}{c} f_1 \\ 0 \end{array}\right] +\left[\begin{array}{cc} K_{q_aq_a} & 0 \\ 0 & K_{p_bp_b} \\ \end{array}\right] \left[ \begin{array}{c} q_a \\ p_b \end{array} \right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-44147b2bcba6800d9c50bd0c6dd35b10_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \ddot{q}_a \\ \ddot{p}_b \end{array}\right] +\left[\begin{array}{cc} {\cal D}_{qq}^a & 0 \\ 0 & {\cal D}_{pp}^b \\ \end{array}\right] \left[\begin{array}{c} \dot{q}_a \\ \dot{p}_b \end{array}\right] + \left[\begin{array}{cc} c_2I_N & 0 \\ 0 & d_2I_N \\ \end{array}\right] \left[ \begin{array}{c} q_a \\ p_b \end{array} \right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9033a9e4027a7affaf17ee92d3666d11_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{= \left[\begin{array}{cc} c_oI_N & 0 \\ 0 & d_0I_N \\ \end{array}\right] \left[\begin{array}{c} \ddot{q} \\ \ddot{p} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c2710937a27bac8e5660893663c4f28d_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{D_{qq}^a=[\chi_3\sum_{j=1}^N\int_0^1|v-\dot{\eta}|\phi_i\phi_jd\xi]_{i,j=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-241b8cdd8b6e9aaf13c57a46ff008718_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{D_{qq}^b=[\chi_3\sum_{j=1}^N\int_0^1|\dot{\eta}|\psi_i\psi_jd\xi]_{i,j=1,\cdots,N} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e8f08ce28177cfbb21d1d507724ff197_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{f_1=[\chi_3\int_0^1\phi_i|v-\dot{\eta}|vd\xi]_{i=1,\cdots,N}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f99c884257f87a07bd06327c7a1a6099_l3.png "Rendered by QuickLaTeX.com")
{kind=link}
{kind=link}
{kind=link}