2次系の周波数応答…Homework
[1] 次のようにパラメタライズされた漸近安定な1入力1出力2次系の状態空間表現を考えます。
![\displaystyle{(1a)\quad \underbrace{ \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{x}_2(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{cc} 0 & 1\\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{cc} 0 \\ K\omega_n^2 \end{array}\right] }_{B} u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2c38bce5a54dbe22b2c1cfbb9ac7882a_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(1b)\quad y(t)= \underbrace{ \left[\begin{array}{cc} 1 & 0 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f5e291f6df4bf13c895efeb7714483d4_l3.png "Rendered by QuickLaTeX.com")
ここで、 とします。また以下では簡単のため
とします。また以下では簡単のため とします。このときインパルス応答は、次式で与えられました。
とします。このときインパルス応答は、次式で与えられました。


この2次系に対して、正弦波入力

を考えます。2次振動系()の場合、零状態応答は次式で与えられます(導出は Note A24-2を参照)。



ここで、 とすると
とすると

ただし

これは、入力が正弦波のときは、時間が十分立てば、出力も正弦波となることを示しています。その振幅と位相はそれぞれ の絶対値と偏角となっています。
の絶対値と偏角となっています。
 をゲイン、
をゲイン、 を位相と呼びます。このゲイン線図と位相線図をペアにして片対数グラフにプロットしたものをボード線図と呼びます。ゲインはdb値(
を位相と呼びます。このゲイン線図と位相線図をペアにして片対数グラフにプロットしたものをボード線図と呼びます。ゲインはdb値( )、位相はdeg値(
)、位相はdeg値( )です。
)です。
実際、2次系において のとき、ボード線図を描いてみると次のグラフが得られます
のとき、ボード線図を描いてみると次のグラフが得られます
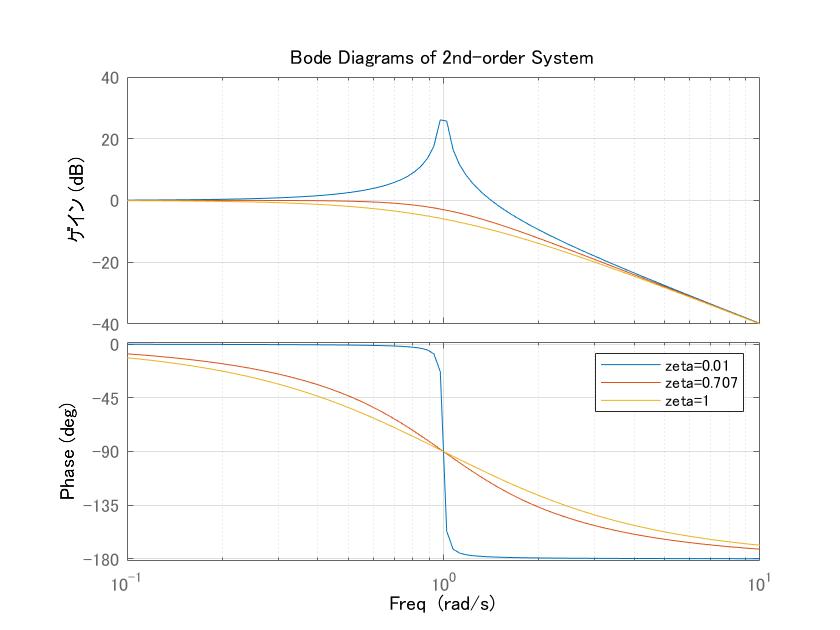 図1 2次系の周波数応答の比較
図1 2次系の周波数応答の比較
周波数応答に基づく2次系の同定…Homework
[2] 2次振動系の場合、ゲイン線図

の頂点は次式で与えられます。

ここで、頂点が現れる条件、 がついていることに注意してください。
がついていることに注意してください。
実際、 を満足する
を満足する は
は

となって、次式のように表されます。

また、このときの最大値は

となって、次式のように表されます。。

(10)と(12)から、2次振動系はゲイン線図が頂点を持つ場合、その座標 を求めて、減衰係数と固有角周波数
を求めて、減衰係数と固有角周波数 が得られることを示しています。
が得られることを示しています。
●ちなみに、 を満足する帯域幅
を満足する帯域幅 は次のように計算されます。
は次のように計算されます。

において、 とおくと
とおくと

となって、次式のように表されます。

演習A24…Flipped Classroom
図1のゲイン曲線#1を描け。
| MATLAB |
|
| SCILAB |
|
Note A24-1 n次系の周波数応答
次の漸近安定な1入力1出力 次系の状態空間表現を考えます。
次系の状態空間表現を考えます。

このとき、正弦波入力

に対する零状態応答を計算します。そのために

を、零状態応答の式

に代入して
![(5)\quad \begin{array}{l} \displaystyle{y(t)=\int_0^tC\exp(A(t-\tau))Be^{j\omega\tau}d\tau}\\ \displaystyle{=C\exp(At)\int_0^te^{j\omega\tau}\exp(-A\tau)Bd\tau}\\ \displaystyle{=C\exp(At)\int_0^t\exp(j\omega\tau I_n)\exp(-A\tau)Bd\tau}\\ \displaystyle{=C\exp(At)\int_0^t\exp((j\omega I_n-A)\tau)Bd\tau}\\ \displaystyle{=C\exp(At) \left[\frac{}{}\exp((j\omega I_n-A)\tau)\right]_0^t(j\omega I_n-A)^{-1}B}\\ \displaystyle{=C\exp(At) (\exp((j\omega I_n-A)t)-I_n)(j\omega I_n-A)^{-1}B}\\ \displaystyle{=-C\exp(At)(j\omega I_n-A)^{-1}B+C\exp(At)\exp(j\omega t I_n)\exp(-At)(j\omega I_n-A)^{-1}B}\\ \displaystyle{=-C\exp(At)(j\omega I_n-A)^{-1}B+C(j\omega I_n-A)^{-1}Be^{j\omega t}} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-cf72e1d083b5093019ffc1a9ae42a3ca_l3.png "Rendered by QuickLaTeX.com")
ここでとすると

これから正弦波入力(3)に対する零状態応答は、のとき次式で与えられます。

これは、入力が正弦波のときは、時間が十分立てば、出力も正弦波となることを示しています。その振幅と位相はそれぞれの絶対値と偏角となっています。
Note A24-2 2次系の周波数応答
次の2次系を考えます。
![\displaystyle{(1a)\quad \underbrace{ \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{x}_2(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{cc} 0 & 1\\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{cc} 0 \\ \omega_n^2 \end{array}\right] }_{B} u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b716bd0f77f40c082b3d8efd7314fe4f_l3.png "Rendered by QuickLaTeX.com")
ここで、とします。このときインパルス応答は
でした。いま、正弦波入力
に対する時間応答を考えます。このとき、公式




を用いて、周波数応答が次のように得られます。
![(5)\quad \begin{array}{l} \displaystyle{y(t)=\int_0^t\frac{\omega_n^2}{\lambda_I}e^{\lambda_R(t-\tau)}\sin\lambda_I(t-\tau)\sin\omega\tau\,d\tau}\\ \displaystyle{=\frac{\omega_n^2}{\lambda_I}e^{\lambda_Rt}\sin\lambda_It\int_0^te^{-\lambda_R\tau}\sin\omega\tau\cos\lambda_I\tau\,d\tau}\\ \displaystyle{-\frac{\omega_n^2}{\lambda_I}e^{\lambda_Rt}\cos\lambda_It\int_0^te^{-\lambda_R\tau}\sin\omega\tau\sin\lambda_I\tau\,d\tau}\\ \displaystyle{=\frac{\omega_n^2}{\lambda_I}e^{\lambda_Rt}\sin\lambda_It\times}\\ \displaystyle{(\left[\frac{e^{-\lambda_R\tau}(-\lambda_R\sin(\omega+\lambda_I)\tau-(\omega+\lambda_I)\cos(\omega+\lambda_I)\tau)}{2(\lambda_R^2+(\omega+\lambda_I)^2)}\right.}\\ \displaystyle{+\left.\frac{e^{-\lambda_R\tau}(-\lambda_R\sin(\omega-\lambda_I)\tau-(\omega-\lambda_I)\cos(\omega-\lambda_I)\tau)}{2(\lambda_R^2+(\omega-\lambda_I)^2)}\right]_0^t)}\\ \displaystyle{-\frac{\omega_n^2}{\lambda_I}e^{\lambda_Rt}\cos\lambda_It\times}\\ \displaystyle{(\left[-\frac{e^{-\lambda_R\tau}(-\lambda_R\cos(\omega+\lambda_I)\tau+(\omega+\lambda_I)\sin(\omega+\lambda_I)\tau)}{2(\lambda_R^2+(\omega+\lambda_I)^2)}\right.}\\ \displaystyle{+\left.\frac{e^{-\lambda_R\tau}(-\lambda_R\cos(\omega-\lambda_I)\tau+(\omega-\lambda_I)\sin(\omega-\lambda_I)\tau)}{2(\lambda_R^2+(\omega-\lambda_I)^2)^2}\right]_0^t)}\\ \displaystyle{=\frac{\omega_n^2}{\lambda_I}e^{\lambda_Rt}\sin\lambda_It\times}\\ \displaystyle{(\frac{e^{-\lambda_Rt}(-\lambda_R\sin(\omega+\lambda_I)t-(\omega+\lambda_I)\cos(\omega+\lambda_I)t)+\omega+\lambda_I}{2(\lambda_R^2+(\omega+\lambda_I)^2)}}\\ \displaystyle{+\frac{e^{-\lambda_Rt}(-\lambda_R\sin(\omega-\lambda_I)t-(\omega-\lambda_I)\cos(\omega-\lambda_I)t)+\omega-\lambda_I}{2(\lambda_R^2+(\omega-\lambda_I)^2)})}\\ \displaystyle{-\frac{\omega_n^2}{\lambda_I}e^{\lambda_Rt}\cos\lambda_It\times}\\ \displaystyle{(\frac{-e^{-\lambda_Rt}(-\lambda_R\cos(\omega+\lambda_I)t+(\omega+\lambda_I)\sin(\omega+\lambda_I)t)-\lambda_R}{2(\lambda_R^2+(\omega+\lambda_I)^2)}}\\ \displaystyle{+\frac{e^{-\lambda_Rt}(-\lambda_R\cos(\omega-\lambda_I)t+(\omega-\lambda_I)\sin(\omega-\lambda_I)t)+\lambda_R}{2(\lambda_R^2+(\omega-\lambda_I)^2)})} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0862d7bcce2485ad411ad20ffd65abfd_l3.png "Rendered by QuickLaTeX.com")
さらに変形すると

これを、公式


を用いて、以下のように変形します。

ここで


および

だから

すなわち、周波数応答は



のように表されます。
 入力
入力 出力
出力
 の第
の第 列を
列を 、行列
、行列 の第
の第 列を
列を で表すとき、第
で表すとき、第 から第
から第 までの時間応答は
までの時間応答は
 は(1)のインパルス応答行列の
は(1)のインパルス応答行列の 要素で、次のように与えられます。
要素で、次のように与えられます。


![\displaystyle{(6a)\quad \underbrace{ \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{x}_2(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{cc} 0 & 1\\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{cc} 0 \\ K\omega_n^2 \end{array}\right] }_{B} u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-163123fac605973ff5bb7e352fe8a4e4_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(6b)\quad y(t)= \underbrace{ \left[\begin{array}{cc} 1 & 0 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c9800fcc5420d0c26c37f1aa628b4db9_l3.png "Rendered by QuickLaTeX.com")
 の固有値
の固有値 を計算すると、
を計算すると、 、
、 に応じて、それぞれ次に示すようになります。
に応じて、それぞれ次に示すようになります。
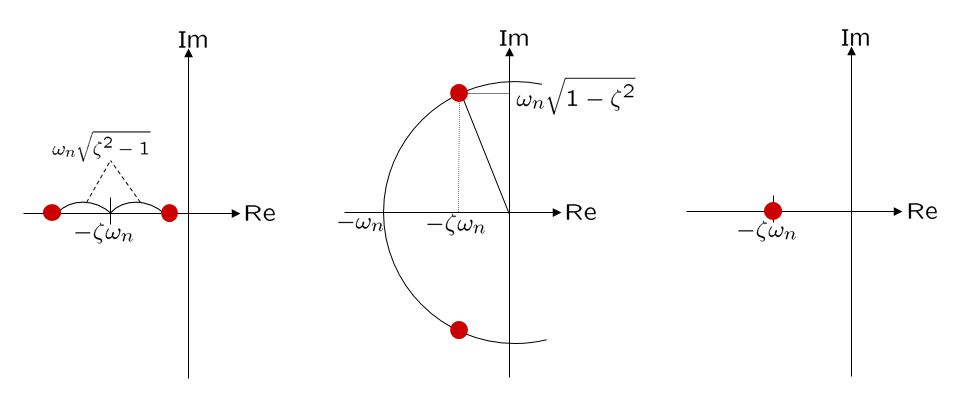 図1
図1 ![A=\left[\begin{array}{cc} 0 & 1\\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d70c5af2ff571c6c6893388008f08cdf_l3.png "Rendered by QuickLaTeX.com") の固有値分布
の固有値分布 とおくと、インパルス応答とステップ応答はそれぞれ次式で与えられます。
とおくと、インパルス応答とステップ応答はそれぞれ次式で与えられます。

![(9)\quad \begin{array}{l} \displaystyle{S(t)=\int_0^tG(\tau)d\tau=\int_0^t\frac{\lambda_1 \lambda_2}{\lambda_2-\lambda_1}(e^{\lambda_2\tau}-e^{\lambda_1\tau})d\tau}\\ \displaystyle{= \frac{\lambda_1 \lambda_2}{\lambda_2-\lambda_1}\left[\frac{e^{\lambda_2\tau}}{\lambda_2}-\frac{e^{\lambda_1\tau}}{\lambda_1}\right]_0^t}\\ \displaystyle{=\frac{\lambda_1 \lambda_2}{\lambda_2-\lambda_1}(\frac{e^{\lambda_2t}}{\lambda_2}-\frac{e^{\lambda_1t}}{\lambda_1})-\frac{\lambda_1 \lambda_2}{\lambda_2-\lambda_1}(\frac{1}{\lambda_2}-\frac{1}{\lambda_1})}\\ \displaystyle{=1+\frac{1}{\lambda_2-\lambda_1}(\lambda_1e^{\lambda_2t}-\lambda_2e^{\lambda_1t})} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-71159c7ee47771d4db9ea63f64ac8347_l3.png "Rendered by QuickLaTeX.com")
 とおくと、インパルス応答とステップ応答はそれぞれそれぞれ次式で与えられます。
とおくと、インパルス応答とステップ応答はそれぞれそれぞれ次式で与えられます。


![(12)\quad \begin{array}{l} \displaystyle{S(t)=\int_0^tG(\tau)d\tau=\int_0^t\frac{\omega_n^2}{\lambda_I}e^{\lambda_R\tau}\sin\lambda_I \tau d\tau}\\ \displaystyle{=\frac{\omega_n^2}{\lambda_I}\left[ \frac{e^{\lambda_R\tau}}{\lambda_R^2+\lambda_I^2}(\lambda_R\sin\lambda_I\tau-\lambda_I\cos\lambda_I\tau)\right]_0^t}\\ \displaystyle{=\frac{\omega_n^2}{\lambda_I}\frac{1}{\omega_n^2} (e^{\lambda_Rt}(\lambda_R\sin\lambda_It-\lambda_I\cos\lambda_It)+\lambda_I)}\\ \displaystyle{=1-\frac{\omega_n}{\lambda_I}e^{\lambda_Rt} (\sin\lambda_It\times\frac{-\lambda_R}{\omega_n}+\cos\lambda_It\times\frac{\lambda_I}{\omega_n})}\\ \displaystyle{=1-\frac{\omega_n}{\lambda_I}e^{\lambda_Rt} (\sin\lambda_It\cos\phi+\cos\lambda_It\sin\phi)}\\ \displaystyle{=1-\frac{\omega_n}{\lambda_I}e^{\lambda_Rt}\sin(\lambda_It+\phi) \quad(\phi=\tan^{-1}\frac{\lambda_I}{-\lambda_R})} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-70211d9c75bdadc0383d2b9c1b25fa64_l3.png "Rendered by QuickLaTeX.com")
 とおくと、インパルス応答とステップ応答はそれぞれそれぞれ次式で与えられます。
とおくと、インパルス応答とステップ応答はそれぞれそれぞれ次式で与えられます。

![(14)\quad \begin{array}{l} \displaystyle{S(t)=\int_0^tG(\tau)d\tau=\int_0^t\lambda^2\tau e^{\lambda\tau}d\tau}\\ \displaystyle{=\lambda^2\left[\tau \frac{1}{\lambda}e^{\lambda\tau}\right]_0^t -\lambda^2\int_0^t \frac{1}{\lambda}e^{\lambda\tau}d\tau}\\ \displaystyle{=\lambda te^{\lambda t}-\lambda\left[\frac{1}{\lambda}e^{\lambda\tau}\right]_0^t}\\ \displaystyle{=1+(\lambda t-1)e^{\lambda t}} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f57dc1b1984646aeeeaafbb17bfcee60_l3.png "Rendered by QuickLaTeX.com")
 、
、 、
、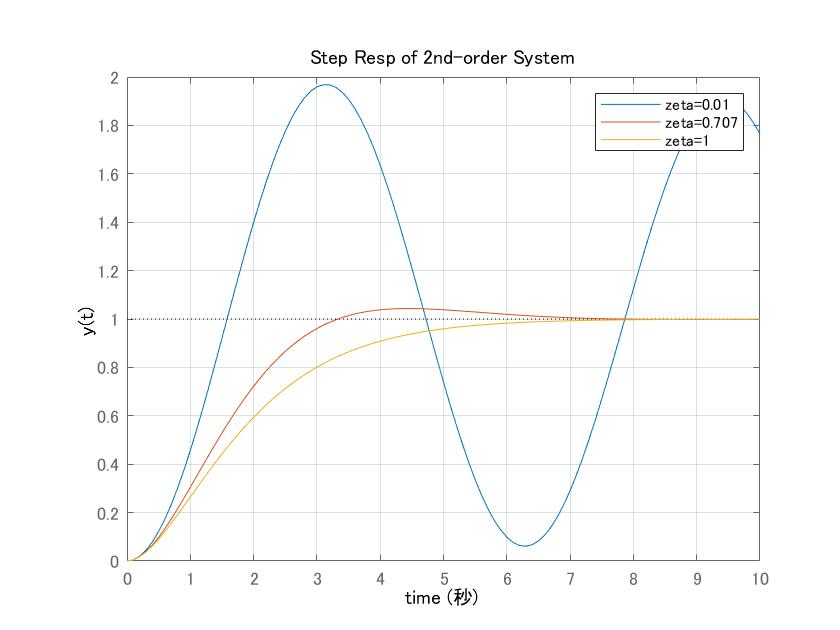 図2 2次系のステップ応答の比較
図2 2次系のステップ応答の比較

 を計算すると
を計算すると

 における
における の値は
の値は

 から
から


 )、上式は
)、上式は
 とすると(零状態応答だけを考えます)
とすると(零状態応答だけを考えます)


 図1 多変数系時間等応答の相互関係
図1 多変数系時間等応答の相互関係 、
、 、
、 はそれぞれ減衰係数、固有角周波数、定常ケインと呼ばれます。
はそれぞれ減衰係数、固有角周波数、定常ケインと呼ばれます。![\displaystyle{(7a)\quad \boxed{\underbrace{ \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{x}_2(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{cc} 0 & 1\\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{cc} 0 \\ K\omega_n^2 \end{array}\right] }_{B} u(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-aa4b19afa6fbdeb818288fb5934edb63_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(7b)\quad y(t)= \underbrace{ \left[\begin{array}{cc} 1 & 0 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1ef77e878f73e539d8dc80f6688ac1a5_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(10a)\quad \underbrace{ \left[\begin{array}{cc} 0 & 1\\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} = \underbrace{ \left[\begin{array}{cc} 1 & 1\\ \lambda_1 & \lambda_2 \end{array}\right] }_{V} \underbrace{ \left[\begin{array}{cc} \lambda_1& 0\\ 0 & \lambda_2 \end{array}\right] }_{\Lambda} \underbrace{ \left[\begin{array}{cc} 1 & 1\\ \lambda_1 & \lambda_2 \end{array}\right]^{-1} }_{V^{-1}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3cecd035fcbda6f346f77661cc428347_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(10b)\quad \exp(\Lambda t)= \left[\begin{array}{cc} e^{\lambda_1t}& 0\\ 0 & e^{\lambda_2t} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f33756dd4649828b5eb0b564b9e54eb9_l3.png "Rendered by QuickLaTeX.com")
![(11)\quad \begin{array}{l} \displaystyle{G(t)=C\exp(At)B=CV\exp(\Lambda t)V^{-1}B}\\ \displaystyle{ =\left[\begin{array}{cc} 1 & 0 \end{array}\right] \left[\begin{array}{cc} 1 & 1\\ \lambda_1 & \lambda_2 \end{array}\right] \left[\begin{array}{cc} e^{\lambda_1t}& 0\\ 0 & e^{\lambda_2t} \end{array}\right] \frac{1}{\lambda_2-\lambda_1} \left[\begin{array}{cc} \lambda_2 & -1\\ -\lambda_1 & 1 \end{array}\right] \left[\begin{array}{cc} 0 \\ \omega_n^2 \end{array}\right]}\\ \displaystyle{ =\frac{\omega_n^2}{\lambda_2-\lambda_1} \left[\begin{array}{cc} e^{\lambda_1t}& e^{\lambda_2t} \end{array}\right] \left[\begin{array}{cc} -1\\ 1 \end{array}\right]}\\ \displaystyle{=\frac{\lambda_1 \lambda_2}{\lambda_2-\lambda_1}(e^{\lambda_2t}-e^{\lambda_1t})} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1f10feaa91b2bb7d8913903cbd15b9c3_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(13a)\quad \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} = \underbrace{ \left[\begin{array}{cc} 1 & 0 \\ \lambda_R & \lambda_I \end{array}\right] }_{V} \underbrace{ \left[\begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array}\right] }_{\Lambda} \underbrace{ \frac{1}{\lambda_I} \left[\begin{array}{cc} \lambda_I & 0 \\ -\lambda_R & 1 \end{array}\right] }_{V^{-1}}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-615266a9890c4e3022d07970c6f5f659_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(13b)\quad \exp(\Lambda t)= e^{\lambda_R t} \left[\begin{array}{cc} \cos\lambda_I t & \sin\lambda_I t\\ \sin\lambda_I t & \cos\lambda_I t \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1181644876ac095faec7948783874615_l3.png "Rendered by QuickLaTeX.com")
![(14)\quad \begin{array}{l} \displaystyle{G(t)=C\exp(At)B=CV\exp(\Lambda t)V^{-1}B}\\ \displaystyle{=\left[\begin{array}{cc} 1 & 0 \end{array}\right] \left[\begin{array}{cc} 1 & 0\\ \lambda_R & \lambda_I \end{array}\right] e^{\lambda_R t} \left[\begin{array}{cc} \cos\lambda_I t & \sin\lambda_I t\\ \sin\lambda_I t & \cos\lambda_I t \end{array}\right] \frac{1}{\lambda_I} \left[\begin{array}{cc} \lambda_I & 0\\ -\lambda_R & 1 \end{array}\right] \left[\begin{array}{cc} 0 \\ \omega_n^2 \end{array}\right]}\\ \displaystyle{=\frac{\omega_n^2}{\lambda_I} e^{\lambda_R t} \left[\begin{array}{cc} 1 & 0 \end{array}\right] \left[\begin{array}{cc} \cos\lambda_I t & \sin\lambda_I t\\ \sin\lambda_I t & \cos\lambda_I t \end{array}\right] \left[\begin{array}{cc} 0\\ 1 \end{array}\right]}\\ \displaystyle{=\frac{\omega_n^2}{\lambda_I} e^{\lambda_R t}\sin\lambda_I t} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2f44bd53bbc94bd725169439890f6d6f_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(16a)\quad \underbrace{ \left[\begin{array}{cc} 0 & 1\\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} = \underbrace{ \left[\begin{array}{cc} 1 & 1\\ \lambda & \lambda+1 \end{array}\right] }_{V} \underbrace{ \left[\begin{array}{cc} \lambda & 1\\ 0 & \lambda \end{array}\right] }_{\Lambda} \underbrace{ \left[\begin{array}{cc} 1 & 1\\ \lambda & \lambda+1 \end{array}\right]^{-1} }_{V^{-1}}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8cd4b43f3e55efbc7942c5a68825fdd5_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(16b)\quad \exp(\Lambda t)= e^{\lambda t} \left[\begin{array}{cc} 1 & t\\ 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-531ba00175d16217ea3879c138ccf345_l3.png "Rendered by QuickLaTeX.com")
![(17)\quad \begin{array}{l} \displaystyle{G(t)=C\exp(At)B=CV\exp(\Lambda t)V^{-1}B}\\ \displaystyle{= \left[\begin{array}{cc} 1 & 0 \end{array}\right] \left[\begin{array}{cc} 1 & 1\\ \lambda & \lambda+1 \end{array}\right] e^{\lambda t} \left[\begin{array}{cc} 1 & t\\ 0 & 1 \end{array}\right] \frac{1}{\lambda+1-\lambda} \left[\begin{array}{cc} \lambda+1 & -1\\ -\lambda & 1 \end{array}\right] \left[\begin{array}{cc} 0 \\ \omega_n^2 \end{array}\right]}\\ \displaystyle{= \omega_n^2 e^{\lambda t} \left[\begin{array}{cc} 1 & t+1 \end{array}\right] \left[\begin{array}{cc} -1\\ 1 \end{array}\right]}\\ \displaystyle{=\lambda^2te^{\lambda t}} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-879b5bb9640f77dc6264c3509e6d3b66_l3.png "Rendered by QuickLaTeX.com")
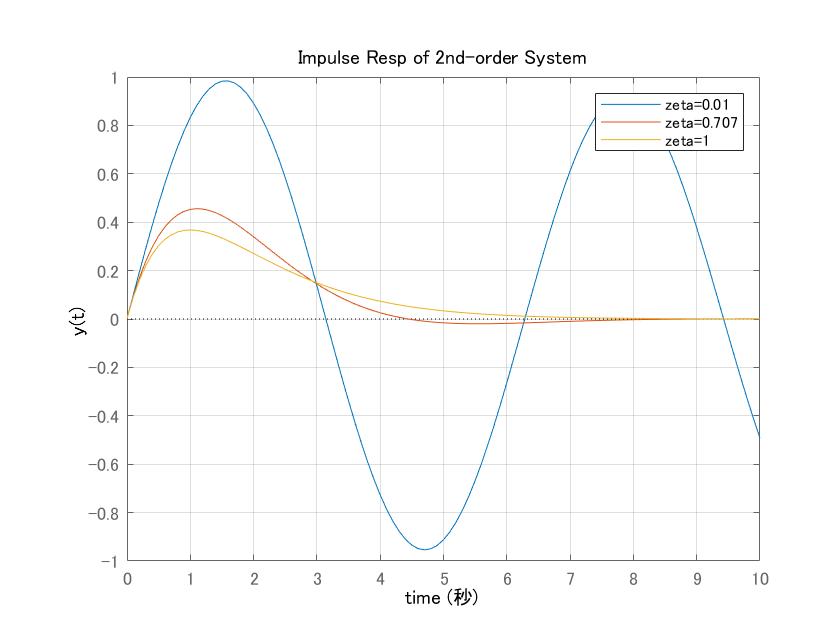 図3 2次系のインパルス応答の比較
図3 2次系のインパルス応答の比較
 の頂点の座標について、次が成り立ちます。
の頂点の座標について、次が成り立ちます。
 を計算すると
を計算すると

 における
における の値は
の値は



 は一定であることを示しています。(25)はインパルス応答の隣合う山と山の振幅比(または谷と谷の振幅比)
は一定であることを示しています。(25)はインパルス応答の隣合う山と山の振幅比(または谷と谷の振幅比) は一定であることを示しています。
は一定であることを示しています。 から
から


 から
から まで積分して
まで積分して![\displaystyle{(3)\quad\left[\exp(-At)x(t)\right]_0^{t'}=\int_0^{t'}\exp(-At)Bu(t)dt}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c830bab15955cf4a78ccc6e7124f4b5f_l3.png "Rendered by QuickLaTeX.com")


 を
を に、
に、
 と
と に対するそれぞれの零状態応答は
に対するそれぞれの零状態応答は




 )と(
)と( )を持ちます。
)を持ちます。

 は定数)。これから平衡状態(
は定数)。これから平衡状態(![\displaystyle{(2)\quad \underbrace{ \left[\begin{array}{l} \dot{\theta}(t) \\ \dot{\omega}(t) \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\frac{3g}{4\ell}&-\frac{c}{J} \end{array}\right] }_{A=A_1} \underbrace{ \left[\begin{array}{l} \theta(t) \\ \omega(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4b0ce9ec40944273a34f18d341b8adee_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(3)\quad \underbrace{ \frac{d}{dt} \left[\begin{array}{l} \theta(t)-\pi \\ \omega(t)-0 \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ \frac{3g}{4\ell}&-\frac{c}{J} \end{array}\right] }_{A=A_2} \underbrace{ \left[\begin{array}{l} \theta(t)-\pi \\ \omega(t)-0 \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-41c9758c694af6b502977f96707d2252_l3.png "Rendered by QuickLaTeX.com")
 において、
において、 を意味します。そこで平衡状態が乱されて
を意味します。そこで平衡状態が乱されて となる時刻を
となる時刻を にとると、線形状態方程式は次式となります。
にとると、線形状態方程式は次式となります。
 に戻ることでしたから、次のように表すことができます。
に戻ることでしたから、次のように表すことができます。
 の解を求める必要があります。これは次式で表されます(Note A21-1参照)。
の解を求める必要があります。これは次式で表されます(Note A21-1参照)。
 は
は に対して、行列指数関数
に対して、行列指数関数 は
は
 の場合について詳しく説明します。
の場合について詳しく説明します。![\displaystyle{(8)\quad \underbrace{ \left[\begin{array}{l} \dot{x}_1(t) \\ \dot{x}_2(t) \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} a_{11} & a_{12} \\ a_{21} & a_{22} \\ \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{l} x_1(t) \\ x_2(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-046c4f6841329195eebc57253eb3c74e_l3.png "Rendered by QuickLaTeX.com")

 であれば
であれば

![\displaystyle{(12)\quad \underbrace{ \left[\begin{array}{l} {x}_1(t) \\ {x}_2(t) \end{array}\right] }_{{x}(t)}= \underbrace{ \left[\begin{array}{cc} e^{a_{11}t} & 0 \\ 0 & e^{a_{22}t} \\ \end{array}\right] }_{\exp(At)} \underbrace{ \left[\begin{array}{l} x_1(0) \\ x_2(0) \end{array}\right] }_{x(0)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3fc962831e63a0a25061b8aa13a7e276_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(14)\quad \underbrace{ \left[\begin{array}{l} {y}_1(t) \\ {y}_2(t) \end{array}\right] }_{y(t)}= \underbrace{ \left[\begin{array}{cc} t_{11} & t_{12} \\ t_{21} & t_{22} \\ \end{array}\right] }_{T} \underbrace{ \left[\begin{array}{l} x_1(t) \\ x_2(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1f9192d4ccaf8b281f53ec8515bc7e4e_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(16)\quad \underbrace{ \left[\begin{array}{l} {x}_1(t) \\ {x}_2(t) \end{array}\right] }_{x(t)}= \underbrace{ \left[\begin{array}{cc} v_{11} & v_{12} \\ v_{21} & v_{22} \\ \end{array}\right] }_{V} \underbrace{ \left[\begin{array}{l} y_1(t) \\ y_2(t) \end{array}\right] }_{y(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c2d9dcfa810ad808ce73e74692c8a23e_l3.png "Rendered by QuickLaTeX.com")
 が成り立つので、
が成り立つので、 は
は (
( )となっています。逆行列をもつ行列は正則行列と呼ばれます。
)となっています。逆行列をもつ行列は正則行列と呼ばれます。 を行ないます。
を行ないます。 (
( を代入して次を得ます。
を代入して次を得ます。
 を標準形とする方法として学びました。もし
を標準形とする方法として学びました。もし を求めることができると
を求めることができると

![\displaystyle{(20)\quad \Lambda_1= \left[\begin{array}{cc} \lambda_1 & 0 \\ 0 & \lambda_2 \end{array}\right] \quad(\lambda(A)=\{\lambda_1,\lambda_2\}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e1804e6c678de29c4cdaec3d2b35ea9d_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(21)\quad \Lambda_2= \left[\begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array}\right] \quad(\lambda(A)=\{\lambda_R\pm j\lambda_I\}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e83b638919ed22ed2816ba8b87e8efc9_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(22)\quad \Lambda_3= \left[\begin{array}{cc} \lambda & 1 \\ 0 & \lambda \end{array}\right] \quad(\lambda(A)=\{\lambda,\lambda\}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-776d81e4bf4b579814ecfc5f23b30528_l3.png "Rendered by QuickLaTeX.com")
 、
、 、
、 、
、 はすべて実数です。また任意の
はすべて実数です。また任意の で表すと
で表すと
 は行列
は行列 は特性多項式と呼ばれます。
は特性多項式と呼ばれます。![\displaystyle{(24)\quad \exp(\Lambda_1 t)= \left[\begin{array}{cc} e^{\lambda_1t} & 0 \\ 0 & e^{\lambda_2 t} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c6b08b1e611d0a89659e8db279dcb12c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(25)\quad \exp(\Lambda_2 t)=e^{\lambda_R t} \left[\begin{array}{cc} \cos(\lambda_It) & \sin(\lambda_It) \\ -\sin(\lambda_It) & \cos(\lambda_It) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-442ba2155026c2418284c3a538a3bd38_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(26)\quad \exp(\Lambda_3 t)=e^{\lambda t} \left[\begin{array}{cc} 1 & t \\ 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f96454be75ef40cad5f86d97de6a1b8a_l3.png "Rendered by QuickLaTeX.com")
 かつ
かつ 、(25)のとき
、(25)のとき 、(26)のとき
、(26)のとき であることがわかると思います。したがって、
であることがわかると思います。したがって、![(27)\quad \begin{array}{l} \displaystyle{{\rm det}(\lambda I_2-\left[\begin{array}{cc} 0 & 1 \\ -\frac{3g}{4\ell}&-\frac{c}{J} \end{array}\right]) =\lambda^2+\frac{c}{J}\lambda+\frac{3g}{4\ell}=0}\\ \displaystyle{\Rightarrow \lambda=\frac{1}{2}(-\frac{c}{J}\pm\sqrt{\frac{c^2}{J^2}-4\frac{3g}{4\ell}})} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-583dc0fe6afab483b2d75508fcda8317_l3.png "Rendered by QuickLaTeX.com")
 より小)。したがって、平衡状態(
より小)。したがって、平衡状態(![(28)\quad \begin{array}{l} \displaystyle{{\rm det}(\lambda I_2-\left[\begin{array}{cc} 0 & 1 \\ \frac{3g}{4\ell}&-\frac{c}{J} \end{array}\right]) =\lambda^2+\frac{c}{J}\lambda-\frac{3g}{4\ell}=0}\\ \displaystyle{\Rightarrow \lambda=\frac{1}{2}(-\frac{c}{J}\pm\sqrt{\frac{c^2}{J^2}+4\frac{3g}{4\ell}})} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-99fa4cb16d7c26822049e462a9e29955_l3.png "Rendered by QuickLaTeX.com")
 行列指数関数について次の指数法則が成り立つことを示せ。
行列指数関数について次の指数法則が成り立つことを示せ。
 行列指数関数の定義から、(24)を示せ。
行列指数関数の定義から、(24)を示せ。 行列指数関数の定義から、次式を用いて、(25)を示せ。
行列指数関数の定義から、次式を用いて、(25)を示せ。![\displaystyle{(30)\quad \left[\begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array}\right]= \underbrace{\lambda_RI_2}_{X}+ \underbrace{\lambda_I \left[\begin{array}{cc} 0 & 1 \\ -1 & 0 \end{array}\right]}_{Y} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8472da3e29ace3b64c9ea7116ccbc33a_l3.png "Rendered by QuickLaTeX.com")
 行列指数関数の定義から、次式を用いて、(26)を示せ。
行列指数関数の定義から、次式を用いて、(26)を示せ。![\displaystyle{(31)\quad \left[\begin{array}{cc} \lambda & 1 \\ 0 & \lambda \end{array}\right]= \underbrace{\lambda I_2}_{X}+ \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 0 & 0 \end{array}\right]}_{Y} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-dcdfdae4bb1e403c6e462b17b09f27aa_l3.png "Rendered by QuickLaTeX.com")
 を実部が大きな順に表示されるように改良せよ。
を実部が大きな順に表示されるように改良せよ。


 をかけると
をかけると

 を定数ベクトルとして
を定数ベクトルとして
 に等しいので
に等しいので



 は適当な
は適当な に対して、
に対して、 となるための条件は
となるための条件は
 (
( )の解のグラフを見ると、
)の解のグラフを見ると、 の場合は、漸近安定ではないが、発散はしないので、不安定とまではいえないのではないかと思うかもしれません。したがって零の固有値を不安定とみなすのか、安定とみなすか迷うところです。しかし、
の場合は、漸近安定ではないが、発散はしないので、不安定とまではいえないのではないかと思うかもしれません。したがって零の固有値を不安定とみなすのか、安定とみなすか迷うところです。しかし、![A=\left[\begin{array}{cc} 0& 1\\ 0& 0 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-376a786d94c78b706c067edc1ab154bc_l3.png "Rendered by QuickLaTeX.com") の場合、解は
の場合、解は![x(t)=\left[\begin{array}{cc} 1& t\\ 0& 1 \end{array}\right]x(0)](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-cd138b72c733ad352d3b5b437f9acd95_l3.png "Rendered by QuickLaTeX.com") となって、
となって、 とし、次が成り立つとします。
とし、次が成り立つとします。
![\displaystyle{(3a)\quad \Lambda_1= \left[\begin{array}{cc} \lambda_1 & 0 \\ 0 & \lambda_2 \end{array}\right] \quad(\lambda(A)=\{\lambda_1,\lambda_2\}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b532756f5ad89c6ab9bdeba946e88dc9_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(3b)\quad \Lambda_2= \left[\begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array}\right] \quad(\lambda(A)=\{\lambda_R\pm j\lambda_I\}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d94729a919c774a51c18cd84bb2f74a3_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(3c)\quad \Lambda_3= \left[\begin{array}{cc} \lambda & 1 \\ 0 & \lambda \end{array}\right] \quad(\lambda(A)=\{\lambda,\lambda\}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c7dc1dc662ca8992d4e346d878d65826_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(4a)\quad A=\underbrace{\left[\begin{array}{cc} v_1 & v_2 \end{array}\right]}_{V} \underbrace{\left[\begin{array}{cc} \lambda_1 & 0 \\ 0 & \lambda_2 \end{array}\right]}_{\Lambda_1} \underbrace{\left[\begin{array}{cc} v_1 & v_2 \end{array}\right]^{-1}}_{V^{-1}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bb555c7741c2c5d90cef778c129e86b1_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(4b)\quad \begin{array}{l} A=\underbrace{\left[\begin{array}{cc} v_R+jv_I & v_R-jv_I \end{array}\right]}_{V} \left[\begin{array}{cc} \lambda_R+j\lambda_I & 0 \\ 0 & \lambda_R-j\lambda_I \end{array}\right]\\ \times\underbrace{\left[\begin{array}{cc} v_R+jv_I & v_R-jv_I \end{array}\right]^{-1}}_{V^{-1}}\\ =\underbrace{\left[\begin{array}{cc} v_R & v_I \end{array}\right]}_{V'} \underbrace{\left[\begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array}\right]}_{\Lambda_2} \underbrace{\left[\begin{array}{cc} v_R & v_I \end{array}\right]^{-1}}_{V'^{-1}} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e0fbba71d2b00a6133e75ae5071cf18d_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(4c)\quad A=\underbrace{\left[\begin{array}{cc} v & v' \end{array}\right]}_{V} \underbrace{\left[\begin{array}{cc} \lambda & 1 \\ 0 & \lambda \end{array}\right]}_{\Lambda_3} \underbrace{\left[\begin{array}{cc} v & v' \end{array}\right]^{-1}}_{V^{-1}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-96f0aeda7d33e0892c1b3ae15b9c822f_l3.png "Rendered by QuickLaTeX.com")
 、
、 、
、 、
、 はすべて2次元の実ベクトルです(
はすべて2次元の実ベクトルです(![\displaystyle{(5a)\quad \exp(A t)=\underbrace{\left[\begin{array}{cc} v_1 & v_2 \end{array}\right]}_{V} \underbrace{\left[\begin{array}{cc} e^{\lambda_1t} & 0 \\ 0 & e^{\lambda_2 t} \end{array}\right]}_{\exp(\Lambda_1 t)} \underbrace{\left[\begin{array}{cc} v_1 & v_2 \end{array}\right]^{-1}}_{V^{-1}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a2c20a571b582858c129f9525483fde7_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(5b)\quad \exp(A t)=\underbrace{\left[\begin{array}{cc} v_R & v_I \end{array}\right]}_{V'} \underbrace{e^{\lambda_R t} \left[\begin{array}{cc} \cos(\lambda_It) & \sin(\lambda_It) \\ -\sin(\lambda_It) & \cos(\lambda_It) \end{array}\right]}_{\exp(\Lambda_2 t)} \underbrace{\left[\begin{array}{cc} v_R & v_I \end{array}\right]^{-1}}_{V'^{-1}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e2598816f3c649ae154eb107c7bd9756_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(5c)\quad \exp(A t)=\underbrace{\left[\begin{array}{cc} v & v' \end{array}\right]}_{V} \underbrace{e^{\lambda t} \left[\begin{array}{cc} 1 & t \\ 0 & 1 \end{array}\right]}_{\exp(\Lambda_3 t)} \underbrace{\left[\begin{array}{cc} v & v' \end{array}\right]^{-1}}_{V^{-1}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1ccd3c10da477fac06071a60073df28c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(6a)\quad \begin{array}{l} x(t)=\underbrace{\left[\begin{array}{cc} v_1 & v_2 \end{array}\right]}_{V} \underbrace{\left[\begin{array}{cc} e^{\lambda_1t} & 0 \\ 0 & e^{\lambda_2 t} \end{array}\right]}_{\exp(\Lambda_1 t)} \underbrace{\left[\begin{array}{cc} v_1 & v_2 \end{array}\right]^{-1}x(0)}_{\left[\begin{array}{c} c_1\\c_2 \end{array}\right]}\\ =c_1e^{\lambda_1t}v_1+c_2e^{\lambda_2t}v_2 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b73bdf17802abab8139590333ce5ddc8_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(6b)\quad \begin{array}{l} x(t)=\underbrace{\left[\begin{array}{cc} v_R & v_I \end{array}\right]}_{V'} \underbrace{e^{\lambda_R t} \left[\begin{array}{cc} \cos(\lambda_It) & \sin(\lambda_It) \\ -\sin(\lambda_It) & \cos(\lambda_It) \end{array}\right]}_{\exp(\Lambda_2 t)} \underbrace{\left[\begin{array}{cc} v_R & v_I \end{array}\right]^{-1}x(0)}_{\left[\begin{array}{c} c_1\\c_2 \end{array}\right]}\\ =c_1e^{\lambda_Rt}(\cos(\lambda_It)v_R-\sin(\lambda_It)v_I)+c_2e^{\lambda_Rt}(\sin(\lambda_It)v_R+\cos(\lambda_It)v_I) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-68447de2b9180ed5ba5e49bac88f6ad3_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(6c)\quad \begin{array}{l} x(t)=\underbrace{\left[\begin{array}{cc} v & v' \end{array}\right]}_{V} \underbrace{e^{\lambda t} \left[\begin{array}{cc} 1 & t \\ 0 & 1 \end{array}\right]}_{\exp(\Lambda_3 t)} \underbrace{\left[\begin{array}{cc} v & v' \end{array}\right]^{-1}x(0)}_{\left[\begin{array}{c} c_1\\c_2 \end{array}\right]}\\ =c_1e^{\lambda t}v+c_2e^{\lambda t}(tv+v') \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a89702614e30351370d03c8a88ab2200_l3.png "Rendered by QuickLaTeX.com")

 、
、 をそれぞれ
をそれぞれ 、
、 と略記します。
と略記します。
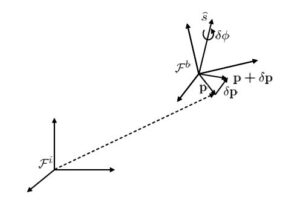
 を、ベクトル
を、ベクトル のまわりに
のまわりに だけ回転して得られるベクトル
だけ回転して得られるベクトル の表現式を求めます。
の表現式を求めます。








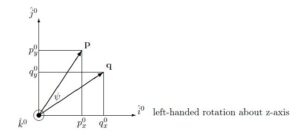
![\displaystyle{\hat{n}\times{\bf p}= {\rm det} \left[\begin{array}{ccc} \hat{i}^0 & \hat{j}^0 & \hat{k}^0\\ \hat{n}_x & \hat{n}_y & \hat{n}_z\\ p_x^0 & p_y^0 & p_z^0 \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-987b3b87c684eb8f160259eccaed8b8c_l3.png "Rendered by QuickLaTeX.com")

 の場合(left-handed rotation about z-axis)
の場合(left-handed rotation about z-axis)
![\displaystyle{ \underbrace{ \left[\begin{array}{c} q_x^0 \\ q_y^0 \\ q_z^0 \end{array}\right] }_{{\bf q}} =(1-C_\psi) p_z^0 \underbrace{ \left[\begin{array}{c} 0 \\ 0 \\ 1 \end{array}\right] }_{\hat{i}} \hat{n}+C_\psi \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] -S_\psi \left[\begin{array}{c} -p_y^0 \\ p_x^0 \\ 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-12d5ca14cbcc4c55826c7d6d8f899987_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ = \underbrace{ \left[\begin{array}{ccc} C_\psi & S_\psi & 0 \\ -S_\psi & C_\psi & 0 \\ 0 & 0 & 1 \end{array}\right] }_{R(\phi)} \underbrace{ \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] }_{{\bf p}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-034528a2aacb8e95ad6d97e767cee015_l3.png "Rendered by QuickLaTeX.com")
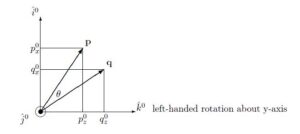
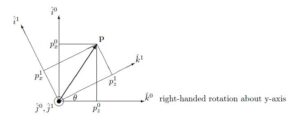
 の場合(left-handed rotation about y-axis)
の場合(left-handed rotation about y-axis)
![\displaystyle{ \underbrace{ \left[\begin{array}{c} q_x^0 \\ q_y^0 \\ q_z^0 \end{array}\right] }_{{\bf q}} =(1-C_\theta) p_y^0 \underbrace{ \left[\begin{array}{c} 0 \\ 1 \\ 0 \end{array}\right] }_{\hat{j}} \hat{n}+C_\theta \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] -S_\theta \left[\begin{array}{c} p_z^0 \\ 0\\ -p_x^0 \\ \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a989718664a4f406a703678aa7bce25c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ =\underbrace{ \left[\begin{array}{ccc} C_\theta & 0 & -S_\theta \\ 0 & 1 & 0 \\ S_\theta & 0 & C_\theta \end{array}\right] }_{R(\theta)} \underbrace{ \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] }_{{\bf p}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-77d80bf487c6766d1c677f8791183be6_l3.png "Rendered by QuickLaTeX.com")
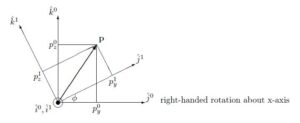
 の場合(left-handed rotation about x-axis)
の場合(left-handed rotation about x-axis)
![\displaystyle{ \underbrace{ \left[\begin{array}{c} q_x^0 \\ q_y^0 \\ q_z^0 \end{array}\right] }_{{\bf q}} =(1-C_\phi) p_x^0 \underbrace{ \left[\begin{array}{c} 1 \\ 0 \\ 0 \end{array}\right] }_{\hat{k}} \hat{n}+C_\phi \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] -S_\phi \left[\begin{array}{c} 0\\ -p_z^0 \\ p_y^0 \\ \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-59bae1ad5756ab21b2c3dfbfa893e055_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ =\underbrace{ \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & C_\phi & S_\phi \\ 0 & -S_\phi & C_\phi \end{array}\right] }_{R(\psi)} \underbrace{ \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] }_{{\bf p}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d1ab1c6a193d60691e385bcb0e30cfb3_l3.png "Rendered by QuickLaTeX.com")








![\displaystyle{ \underbrace{ \left[\begin{array}{c} p_x^1 \\ p_y^1 \\ p_z^1 \end{array}\right] }_{{\bf p}^1} = \underbrace{ \left[\begin{array}{ccc} \hat{i}^1\cdot\hat{i}^0&\hat{i}^1\cdot\hat{j}^0&\hat{i}^1\cdot\hat{k}^0\\ \hat{j}^1\cdot\hat{i}^0&\hat{j}^1\cdot\hat{j}^0&\hat{j}^1\cdot\hat{k}^0\\ \hat{k}^1\cdot\hat{i}^0&\hat{k}^1\cdot\hat{j}^0&\hat{k}^1\cdot\hat{k}^0 \end{array}\right] }_{R_0^1(\psi)} \underbrace{ \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] }_{{\bf p}^0} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9e097cfdaee9cbb694b4d1748693d3c6_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ R_0^1(\psi)= \left[\begin{array}{ccc} C_\psi & S_\psi & 0 \\ -S_\psi & C_\psi & 0 \\ 0 & 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-58ac6cd544f764f340163f5d9e7d61aa_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{ \underbrace{ \left[\begin{array}{c} p_x^1 \\ p_y^1 \\ p_z^1 \end{array}\right] }_{{\bf p}^1} = \underbrace{ \left[\begin{array}{ccc} \hat{i}^1\cdot\hat{i}^0&\hat{i}^1\cdot\hat{j}^0&\hat{i}^1\cdot\hat{k}^0\\ \hat{j}^1\cdot\hat{i}^0&\hat{j}^1\cdot\hat{j}^0&\hat{j}^1\cdot\hat{k}^0\\ \hat{k}^1\cdot\hat{i}^0&\hat{k}^1\cdot\hat{j}^0&\hat{k}^1\cdot\hat{k}^0 \end{array}\right] }_{R_0^1(\theta)} \underbrace{ \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] }_{{\bf p}^0} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-aceb055a39624b49b00c52ba93b2fafc_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ R_0^1(\theta)= \left[\begin{array}{ccc} C_\theta & 0 & -S_\theta \\ 0 & 1 & 0 \\ S_\theta & 0 & C_\theta \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bc434799df6aa0435586745ed76ca371_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \underbrace{ \left[\begin{array}{c} p_x^1 \\ p_y^1 \\ p_z^1 \end{array}\right] }_{{\bf p}^1} = \underbrace{ \left[\begin{array}{ccc} \hat{i}^1\cdot\hat{i}^0&\hat{i}^1\cdot\hat{j}^0&\hat{i}^1\cdot\hat{k}^0\\ \hat{j}^1\cdot\hat{i}^0&\hat{j}^1\cdot\hat{j}^0&\hat{j}^1\cdot\hat{k}^0\\ \hat{k}^1\cdot\hat{i}^0&\hat{k}^1\cdot\hat{j}^0&\hat{k}^1\cdot\hat{k}^0 \end{array}\right] }_{R_0^1(\phi)} \underbrace{ \left[\begin{array}{c} p_x^0 \\ p_y^0 \\ p_z^0 \end{array}\right] }_{{\bf p}^0} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-be939844208f01e80bd96a4578eb7d9c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ R_0^1(\phi)= \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & C_\phi & S_\phi \\ 0 & -S_\phi & C_\phi \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9e26ef5f7bc02c2f2f19b14327fc67f6_l3.png "Rendered by QuickLaTeX.com")
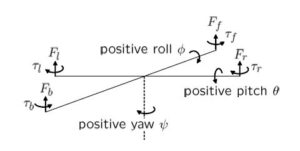
 と機体固定座標系
と機体固定座標系 を用います。
を用います。
 : the inertial (north) position of the aircraft along
: the inertial (north) position of the aircraft along  in
in  : the inertial (east) position of the aircraft along
: the inertial (east) position of the aircraft along  in
in  : the altitude of the aircraft measured along
: the altitude of the aircraft measured along  in
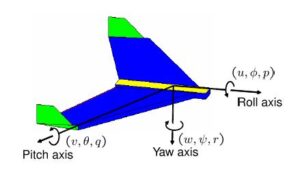
in  : the roll angle defined with respect to
: the roll angle defined with respect to 
 : the pitch angle defined with respect to
: the pitch angle defined with respect to 
 : the yaw angle defined with respect to
: the yaw angle defined with respect to 

 に平行)を表しています。
に平行)を表しています。

![\displaystyle{= \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & C_\phi & S_\phi \\ 0 & -S_\phi & C_\phi \end{array}\right] \left[\begin{array}{ccc} C_\theta & 0 & -S_\theta \\ 0 & 1 & 0 \\ S_\theta & 0 & C_\theta \end{array}\right] \left[\begin{array}{ccc} C_\psi & S_\psi & 0 \\ -S_\psi & C_\psi & 0 \\ 0 & 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-cbcf941c508f91c6e056f42732084bf5_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ = \left[\begin{array}{ccc} C_\theta C_\psi & C_\theta S_\psi & -S_\theta \\ S_\phi S_\theta C_\psi - C_\phi S_\psi & S_\phi S_\theta S_\psi + C_\phi C_\psi & S_\phi C_\theta \\ C_\phi S_\theta C_\psi + C_\phi S_\psi & C_\phi S_\theta S_\psi - S_\phi C_\psi & C_\phi C_\theta \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bb9eeb9b54c7ae5be019eb255e6bdbd8_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{ R_v^{v1}(\psi)= \left[\begin{array}{ccc} C_\psi & S_\psi & 0 \\ -S_\psi & C_\psi & 0 \\ 0 & 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-62a0d9a3674b84f4cc7fd9463923b711_l3.png "Rendered by QuickLaTeX.com")



![\displaystyle{ R_{v1}^{v2}(\theta)= \left[\begin{array}{ccc} C_\theta & 0 & -S_\theta \\ 0 & 1 & 0 \\ S_\theta & 0 & C_\theta \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-882fd5b2077da6bcc03598d35349e31f_l3.png "Rendered by QuickLaTeX.com")
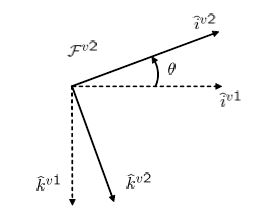


![\displaystyle{ R_{v2}^b(\phi)= \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & C_\phi & S_\phi \\ 0 & -S_\phi & C_\phi \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-65b7f87e8d6ceac41cc3eed6be19136b_l3.png "Rendered by QuickLaTeX.com")





 : the body frame velocity measured along
: the body frame velocity measured along  in
in  in
in  : the body frame velocity measured along
: the body frame velocity measured along  in
in  : the pitch rate measured along
: the pitch rate measured along  : the yaw rate measured along
: the yaw rate measured along ![\displaystyle{ \left[\begin{array}{c} u \\ v \\ w \end{array}\right] = \underbrace{ \left[\begin{array}{ccc} C_\theta C_\psi & C_\theta S_\psi & -S_\theta \\ S_\phi S_\theta C_\psi - C_\phi S_\psi & S_\phi S_\theta S_\psi + C_\phi C_\psi & S_\phi C_\theta \\ C_\phi S_\theta C_\psi + C_\phi S_\psi & C_\phi S_\theta S_\psi - S_\phi C_\psi & C_\phi C_\theta \end{array}\right] }_{R_v^b} \left[\begin{array}{c} \dot{p}_n \\ \dot{p}_e \\ -\dot{h} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-de39a8b9bd05d0eb4e506e36a8e0fa0a_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \dot{p}_n \\ \dot{p}_e \\ -\dot{h} \end{array}\right] = \underbrace{ \left[\begin{array}{ccc} C_\theta C_\psi &S_\phi S_\theta C_\psi - C_\phi S_\psi &C_\phi S_\theta C_\psi + C_\phi S_\psi \\ C_\theta S_\psi &S_\phi S_\theta S_\psi + C_\phi C_\psi &C_\phi S_\theta S_\psi - S_\phi C_\psi \\ -S_\theta &S_\phi C_\theta &C_\phi C_\theta \end{array}\right] }_{R_b^v=(R_v^b)^T} \left[\begin{array}{c} u \\ v \\ w \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d363a281bdd4e8b2b988be4d3069aa11_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} p \\ q \\ r \end{array}\right] = \underbrace{R_{v2}^b(\dot{\phi})}_{I} \left[\begin{array}{c} \dot{\phi} \\ 0 \\ 0 \end{array}\right] + R_{v2}^b(\phi)\underbrace{R_{v1}^{v2}(\dot{\theta})}_{I} \left[\begin{array}{c} 0 \\ \dot{\theta} \\ 0 \end{array}\right] + R_{v2}^b(\phi)R_{v1}^{v2}(\theta)\underbrace{R_{v}^{v1}(\dot{\psi})}_{I} \left[\begin{array}{c} 0 \\ 0 \\ \dot{\psi} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a04c24d997a7e6874afdd3b415001501_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ = \left[\begin{array}{c} \dot{\phi} \\ 0 \\ 0 \end{array}\right] + \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & C_\phi & S_\phi \\ 0 & -S_\phi & C_\phi \end{array}\right] \left[\begin{array}{c} 0 \\ \dot{\theta} \\ 0 \end{array}\right] + \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & C_\phi & S_\phi \\ 0 & -S_\phi & C_\phi \end{array}\right] \left[\begin{array}{ccc} C_\theta & 0 & -S_\theta \\ 0 & 1 & 0 \\ S_\theta & 0 & C_\theta \end{array}\right] \left[\begin{array}{c} 0 \\ 0 \\ \dot{\psi} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-97c20a9db7f00180754feff31ee807c8_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} p \\ q \\ r \end{array}\right]= \left[\begin{array}{ccc} 1 & 0 & -S_\theta \\ 0 & C_\phi & S_\phi C_\theta \\ 0 & -S_\phi & C_\phi C_\theta \end{array}\right] \left[\begin{array}{c} \dot{\phi} \\ \dot{\theta} \\ \dot{\psi} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-061d5edae9ebd68d687e9549b5a5a40b_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \dot{\phi} \\ \dot{\theta} \\ \dot{\psi} \end{array}\right] = \left[\begin{array}{ccc} 1 & S_\phi T_\theta & C_\phi T_\theta \\ 0 & C_\phi & -S_\phi \\ 0 & \frac{S_\phi}{C_\theta} & \frac{C_\phi}{C_\theta} \end{array}\right] \left[\begin{array}{c} p \\ q \\ r \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-10b9bc4111bd976ca0649bb42dfacd55_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{ \frac{d}{dt}_b \left[\begin{array}{c} u\\ v\\ w \end{array}\right] + \left[\begin{array}{c} p\\ q\\ r \end{array}\right] \times \left[\begin{array}{c} u\\ v\\ w \end{array}\right] =\frac{1}{m} \left[\begin{array}{c} f_x\\ f_y\\ f_z \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f49c0967c1c1583628163273d1cc944f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \dot{u}\\ \dot{v}\\ \dot{w} \end{array}\right] =- \underbrace{ \left[\begin{array}{ccc} 0 & -r & q\\ r & 0 &-p\\ -q & p & 0 \end{array}\right] \left[\begin{array}{c} u\\ v\\ w \end{array}\right] }_{\left[\begin{array}{c} qw-rv \\ ru-pw\\ pv-qu \end{array}\right]} +\frac{1}{m} \left[\begin{array}{c} f_x\\ f_y\\ f_z \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6e5e479c4745afec971e8a449e1d7113_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{J= \left[\begin{array}{ccc} \int(y^2+z^2)dm & -\int xydm & -\int xzdm \\ -\int yxdm & \int(x^2+z^2)dm & -\int yzdm \\ -\int zxdm & -\int zydm & \int(x^2+y^2)dm \end{array}\right] =\left[\begin{array}{ccc} J_x & 0 & 0 \\ 0 & J_y & 0 \\ 0 & 0 & J_z \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-16d24597f8387fec8c1eb565263ad684_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \frac{d}{dt}_bJ \left[\begin{array}{c} p\\ q\\ r \end{array}\right] + \left[\begin{array}{c} p\\ q\\ r \end{array}\right] \times J \left[\begin{array}{c} p\\ q\\ r \end{array}\right] = \left[\begin{array}{c} \tau_\phi\\ \tau_\theta\\ \tau_\psi \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3a28be1d9f68276f11ece9ae89a59304_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} J_x\dot{p}\\ J_y\dot{q}\\ J_z\dot{r} \end{array}\right] + \underbrace{ \left[\begin{array}{ccc} 0 & -r & q\\ r & 0 &-p\\ -q & p & 0 \end{array}\right] \left[\begin{array}{c} J_xp\\ J_yq\\ J_zr \end{array}\right] }_{\left[\begin{array}{c} (J_z-J_y)qr \\ (J_x-J_z)pr\\ (J_y-J_x)pq \end{array}\right]} = \left[\begin{array}{c} \tau_\phi\\ \tau_\theta\\ \tau_\psi \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-11a81fab1a1c7f81823c26120d6d2b21_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \dot{p}\\ \dot{q}\\ \dot{r} \end{array}\right] =- \underbrace{ \left[\begin{array}{ccc} 0 & 0 & \frac{J_z-J_y}{J_x}q\\ \frac{J_x-J_z}{J_y} r & 0 & 0\\ 0 & \frac{J_y-J_x}{J_z}p & 0 \end{array}\right] \left[\begin{array}{c} p\\ q\\ r \end{array}\right] }_{ \left[\begin{array}{c} \frac{J_z-J_y}{J_x}qr \\ \frac{J_x-J_z}{J_y}pr \\ \frac{J_y-J_x}{J_z}pq \end{array}\right] } + \left[\begin{array}{c} \frac{1}{J_x}\tau_\phi\\ \frac{1}{J_y}\tau_\theta\\ \frac{1}{J_z}\tau_\psi \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3eb533fddc2cdc3acb2986b508ba0373_l3.png "Rendered by QuickLaTeX.com")
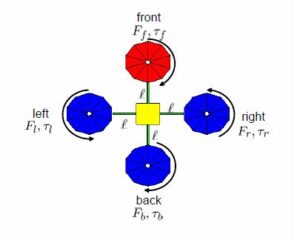
 とします。このとき、各モータによる推力とトルクは次式で表されます。
とします。このとき、各モータによる推力とトルクは次式で表されます。











![\displaystyle{ \left[\begin{array}{c} F\\ \tau_\phi\\ \tau_\theta\\ \tau_\psi \end{array}\right] = \underbrace{ \left[\begin{array}{cccc} k_1 & k_1 & k_1 & k_1 \\ 0 & -\ell k_1 & 0 & \ell k_1 \\ \ell k_1 & 0 & -\ell k_1 & 0 \\ -k_2 & k_2 & -k_2 & k_2 \end{array}\right] }_{{\cal M}} \left[\begin{array}{c} \delta_f\\ \delta_r\\ \delta_b\\ \delta_\ell \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2189a79e26837861510a7bb0f99f2a55_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} f_x\\ f_y\\ f_z \end{array}\right] = R_v^b \left[\begin{array}{c} 0\\ 0\\ mg \end{array}\right] + \left[\begin{array}{c} 0\\ 0\\ -F \end{array}\right] =mg \left[\begin{array}{ccc} -S_\theta \\ S_\phi C_\theta \\ C_\phi C_\theta \end{array}\right] + \left[\begin{array}{c} 0\\ 0\\ -F \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-46b8705ff1f44fac694d366bf9bfc130_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \dot{p}_n \\ \dot{p}_e \\ -\dot{h} \\ \hline \dot{\phi} \\ \dot{\theta} \\ \dot{\psi} \\ \hline \dot{u}\\ \dot{v}\\ \dot{w} \\ \hline \dot{p}\\ \dot{q}\\ \dot{r} \end{array}\right] = \left[\begin{array}{ccc|ccc} 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ \hline 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ \hline 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ \hline 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ \end{array}\right.}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c057cf51cb84ad35be913e5f72b6b095_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left.\begin{array}{ccc|ccc} C_\theta C_\psi &S_\phi S_\theta C_\psi - C_\phi S_\psi &C_\phi S_\theta C_\psi + C_\phi S_\psi & 0 & 0 & 0\\ C_\theta S_\psi &S_\phi S_\theta S_\psi + C_\phi C_\psi &C_\phi S_\theta S_\psi - S_\phi C_\psi & 0 & 0 & 0\\ -S_\theta &S_\phi C_\theta &C_\phi C_\theta & 0 & 0 & 0\\ \hline 0 & 0 & 0 & 1 & S_\phi T_\theta & C_\phi T_\theta \\ 0 & 0 & 0 & 0 & C_\phi & -S_\phi \\ 0 & 0 & 0 & 0 & \frac{S_\phi}{C_\theta} & \frac{C_\phi}{C_\theta}\\ \hline 0 & r &- q & 0 & 0 & 0\\ r- & 0 &p & 0 & 0 & 0\\ q & -p & 0 & 0 & 0 & 0\\ \hline 0 & 0 & 0 & 0 & 0 & -\frac{J_z-J_y}{J_x}q\\ 0 & 0 & 0 & -\frac{J_x-J_z}{J_y} r & 0 & 0\\ 0 & 0 & 0 & 0 & -\frac{J_y-J_x}{J_z}p & 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ac9a7943b0d77c3ef3dcaeb6016011e8_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \times \left[\begin{array}{c} p_n \\ p_e \\ -h \\ \hline \phi \\ \theta \\ \psi \\ \hline u\\ v\\ w \\ \hline p\\ q\\ r \end{array}\right] + \left[\begin{array}{cccc} 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ \hline 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ \hline 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ \frac{1}{m} & 0 & 0 & 0 \\ \hline 0 & \frac{1}{J_x} & 0 & 0 \\ 0 & 0 & \frac{1}{J_y} & 0 \\ 0 & 0 & 0 & \frac{1}{J_z} \\ \end{array}\right] \left[\begin{array}{cccc} k_1 & k_1 & k_1 & k_1 \\ 0 & -\ell k_1 & 0 & \ell k_1 \\ \ell k_1 & 0 & -\ell k_1 & 0 \\ -k_2 & k_2 & -k_2 & k_2 \end{array}\right]^{-1} \left[\begin{array}{c} \delta_f\\ \delta_r\\ \delta_b\\ \delta_\ell \end{array}\right] + \left[\begin{array}{c} 0 \\ 0 \\ 0 \\ \hline 0 \\ 0 \\ 0 \\ \hline -gS_\theta \\ gS_\phi C_\theta \\ gC_\phi C_\theta \\ \hline 0 \\ 0 \\ 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-dfbd76199ec24769a2fab7d91200e5dc_l3.png "Rendered by QuickLaTeX.com")
 、
、 、
、 は小さく無視できる
は小さく無視できる![\displaystyle{ \left[\begin{array}{c} \dot{p}\\ \dot{q}\\ \dot{r} \end{array}\right] =- \left[\begin{array}{c} \frac{J_z-J_y}{J_x}qr \\ \frac{J_x-J_z}{J_y}pr \\ \frac{J_y-J_x}{J_z}pq \end{array}\right] + \left[\begin{array}{c} \frac{1}{J_x}\tau_\phi\\ \frac{1}{J_y}\tau_\theta\\ \frac{1}{J_z}\tau_\psi \end{array}\right] \simeq \left[\begin{array}{c} \frac{1}{J_x}\tau_\phi\\ \frac{1}{J_y}\tau_\theta\\ \frac{1}{J_z}\tau_\psi \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f6a1e8b9f0e32ed0de052e40acd5d9e8_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \dot{\phi} \\ \dot{\theta} \\ \dot{\psi} \end{array}\right] = \left[\begin{array}{ccc} 1 & S_\phi T_\theta & C_\phi T_\theta \\ 0 & C_\phi & -S_\phi \\ 0 & \frac{S_\phi}{C_\theta} & \frac{C_\phi}{C_\theta} \end{array}\right] \left[\begin{array}{c} p \\ q \\ r \end{array}\right] \simeq \left[\begin{array}{c} p \\ q \\ r \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7588cb998bf45f4453bd790068da25cd_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \ddot{\phi} \\ \ddot{\theta} \\ \ddot{\psi} \end{array}\right] \simeq \left[\begin{array}{c} \dot{p}\\ \dot{q}\\ \dot{r} \end{array}\right] \simeq \left[\begin{array}{c} \frac{1}{J_x}\tau_\phi\\ \frac{1}{J_y}\tau_\theta\\ \frac{1}{J_z}\tau_\psi \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c00140559d247b19ba35379d4f2fc7d2_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \dot{p}_x \\ \dot{p}_y \\ \dot{p}_z \end{array}\right] = {R}_{v1}^b \left[\begin{array}{c} u \\ v \\ w \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-07b55ee0eb520a01571a66c82273a1b1_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \ddot{p}_x \\ \ddot{p}_y \\ \ddot{p}_z \end{array}\right] = \underbrace{\dot{R}_{v1}^b}_{\simeq0} \left[\begin{array}{c} {u}\\ {v}\\ {w} \end{array}\right] + {R}_{v1}^b \left[\begin{array}{c} \dot{u}\\ \dot{v}\\ \dot{w} \end{array}\right] \simeq {R}_{v1}^b \left[\begin{array}{c} \dot{u}\\ \dot{v}\\ \dot{w} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b6a4f91764dbe1ccc821cb66b6c128a3_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{c} \ddot{p}_x \\ \ddot{p}_y \\ \ddot{p}_z \end{array}\right] \simeq \left[\begin{array}{ccc} C_\theta & S_\phi S_\theta & C_\phi S_\theta \\ 0 & C_\phi & -S_\phi \\ -S_\theta &S_\phi C_\theta &C_\phi C_\theta \end{array}\right] (g \left[\begin{array}{c} -S_\theta \\ S_\phi C_\theta \\ C_\phi C_\theta \end{array}\right] +\frac{1}{m} \left[\begin{array}{c} 0\\ 0\\ -F \end{array}\right]) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-806c2333ecc5b9e2f2176af3d06ac631_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ = \left[\begin{array}{c} 0 \\ 0 \\ g \end{array}\right] -\frac{1}{m}F \left[\begin{array}{ccc} C_\phi S_\theta \\ -S_\phi \\ C_\phi C_\theta \end{array}\right] \simeq \left[\begin{array}{c} 0 \\ 0 \\ g-\frac{1}{m}F \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a012c160125fa47849e9b54d7a6be80e_l3.png "Rendered by QuickLaTeX.com")




 から決まる
から決まる を各操作入力に前もって加えておくことにすると、次式が成り立ちます。
を各操作入力に前もって加えておくことにすると、次式が成り立ちます。





![\displaystyle{ \underbrace{ \left[\begin{array}{c} \dot{p}_z \\ \dot{\phi} \\ \dot{\theta} \\ \dot{\psi} \\\hline \ddot{z} \\ \ddot{\phi} \\ \ddot{\theta} \\ \ddot{\psi} \\ \end{array}\right] }_{\dot{x}} = \underbrace{ \left[\begin{array}{cccc|cccc} 0 & 0 & 0 & 0 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 1 \\\hline 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ \end{array}\right] }_{A} % \left[\begin{array}{c|c} % 0_{4\times4} & I_4 \\\hline % 0_{4\times4} & 0_{4\times4} % \end{array}\right] \underbrace{ \left[\begin{array}{c} {p_z} \\ {\phi} \\ {\theta} \\ {\psi} \\\hline \dot{z} \\ \dot{\phi} \\ \dot{\theta} \\ \dot{\psi} \\ \end{array}\right] }_{x} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c2d526861def4102dd037941437ebbd2_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{+ \underbrace{ \left[\begin{array}{cccc} 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\\hline -\frac{k_f}{m} & -\frac{k_f}{m} & -\frac{k_f}{m} & -\frac{k_f}{m} \\ 0 & -\frac{\ell k_f}{J_x} & 0 & \frac{\ell k_f}{J_x} \\ \frac{\ell k_f}{J_y} & 0 & -\frac{\ell k_f}{J_y} & 0 \\ -\frac{k_\tau}{J_z} & \frac{k_\tau}{J_z} & -\frac{k_\tau}{J_z} & \frac{k_\tau}{J_z} \\ \end{array}\right] }_{B} % \left[\begin{array}{c} % 0_{4\times4} \\ % B_2 \\ % \end{array}\right] \underbrace{ \left[\begin{array}{c} \delta_f-\delta^* \\ \delta_r-\delta^* \\ \delta_b-\delta^* \\ \delta_\ell-\delta^* \\ \end{array}\right] }_{u} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b01d89585d73ec5fff8e27c5c03036e2_l3.png "Rendered by QuickLaTeX.com")
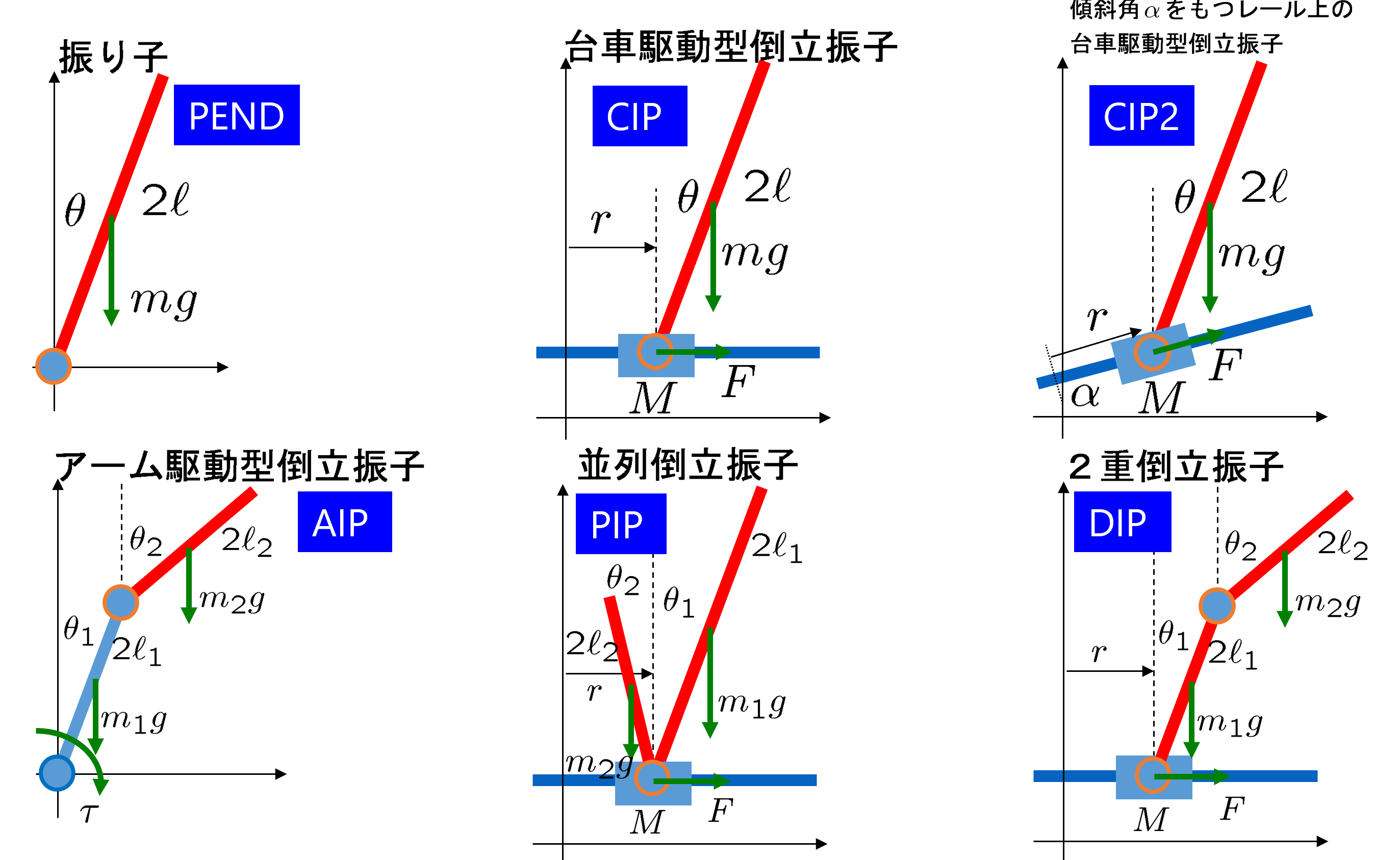 図1 様々な倒立振子
図1 様々な倒立振子


![\displaystyle{(1.3)\quad \frac{d}{dt} \left[\begin{array}{l} \theta \\ \dot{\theta} \end{array}\right] = \left[\begin{array}{l} \dot{\theta} \\ \frac{3g}{4\ell}\sin\theta \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d830fdb0e97a88ec46c71221f084f8ac_l3.png "Rendered by QuickLaTeX.com")
 線形化(linmodの利用)
線形化(linmodの利用)![\displaystyle{(1.5)\quad \frac{d}{dt}\left[\begin{array}{c} \theta-\theta^*\\ \dot{\theta} \end{array}\right] = \left[\begin{array}{cc} 0 & 1\\ \frac{3g\cos\theta^*}{4\ell} & 0 \end{array}\right] \left[\begin{array}{cc} \theta-\theta^*\\ \dot{\theta} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4010d6a39f12f930e6d806a4a857fdd8_l3.png "Rendered by QuickLaTeX.com")
 線形シミュレータの開発
線形シミュレータの開発![(2.1)\quad \begin{array}{l} \displaystyle{\underbrace{ \left[\begin{array}{ccc} M+m & m\ell\cos\theta \\ m\ell\cos\theta & \frac{4}{3}m\ell^2 \end{array}\right] }_{M(\xi_1)} \underbrace{ \left[\begin{array}{c} \ddot{r} \\ \ddot{\theta} \end{array}\right] }_{\dot{\xi}_2}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0 & -m\ell\sin\theta\dot{\theta} \\ 0 & 0 \end{array}\right] }_{C(\xi_1,\xi_2)} \underbrace{ \left[\begin{array}{c} \dot{r} \\ \dot{\theta} \end{array}\right] }_{\dot{\xi}_1}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0\\ -m\ell g\sin\theta \end{array}\right] }_{G(\xi_1)} = \underbrace{ \left[\begin{array}{c} 1 \\ 0 \end{array}\right] F}_{\tilde{F}}} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b6b8157fad48af615f079cdbabc05028_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(2.3)\quad \frac{d}{dt} \left[\begin{array}{l} \xi_1 \\ \xi_2 \end{array}\right] = \left[\begin{array}{l} \xi_2 \\ M^{-1}(\xi_1)(\tilde{F}-C(\xi_1,\xi_2)\dot{\xi}_1}-G(\xi_1)) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-452f10bbd6c4136f4f3d332fb2dec185_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(2.5)\quad \frac{d}{dt}\left[\begin{array}{c} r\\ \theta-\theta^*\\ \dot{r}\\ \dot{\theta} \end{array}\right] = \left[\begin{array}{cccc} 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 1\\ 0 & -\frac{3gm}{4M+m} & 0 & 0\\ 0 & \frac{3(M+m)g}{(4M+m)\ell} & 0 & 0\\ \end{array}\right] \left[\begin{array}{c} r\\ \theta-\theta^*\\ \dot{r}\\ \dot{\theta} \end{array}\right] + \left[\begin{array}{c} 0\\ 0\\ \frac{4}{4M+m}\\ \frac{3}{(4M+m)\ell} \end{array}\right] F }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-fae8887f4f90143f54cd71d63289bc0f_l3.png "Rendered by QuickLaTeX.com")
![(3.1)\quad \begin{array}{l} \displaystyle{\underbrace{ \left[\begin{array}{ccc} M+m & m\ell\cos(\theta+\alpha) \\ m\ell\cos(\theta+\alpha) & \frac{4}{3}m\ell^2 \end{array}\right] }_{M(\xi_1)} \underbrace{ \left[\begin{array}{c} \ddot{r} \\ \ddot{\theta} \end{array}\right] }_{\dot{\xi}_2}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0 & -m\ell\sin(\theta+\alpha)\dot{\theta} \\ 0 & 0 \end{array}\right] }_{C(\xi_1,\xi_2)} \underbrace{ \left[\begin{array}{c} \dot{r} \\ \dot{\theta} \end{array}\right] }_{\dot{\xi}_1}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} (M+m)g\sin\alpha\\ -m\ell g\sin\theta \end{array}\right] }_{G(\xi_1)} = \left[\begin{array}{c} 1 \\ 0 \end{array}\right] F} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9e90c77e32ef0131c7f6472d28283498_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(3.3)\quad \frac{d}{dt} \left[\begin{array}{l} \xi_1 \\ \xi_2 \end{array}\right] = \left[\begin{array}{l} \xi_2 \\ M^{-1}(\xi_1)(\tilde{F}-C(\xi_1,\xi_2)\dot{\xi}_1}-G(\xi_1)) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e10e1b7c9308602afa499d38c4e73370_l3.png "Rendered by QuickLaTeX.com")
![(3.5)\quad \begin{array}{l} \displaystyle{\frac{d}{dt}\left[\begin{array}{c} r\\ \theta-\theta^*\\ \dot{r}\\ \dot{\theta} \end{array}\right] = \left[\begin{array}{cccc} 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 1\\ 0 & -\frac{6\cos\alpha mg}{8M+(5-3\cos2\alpha)m} & 0 & 0\\ 0 & \frac{6(M+m)g}{(8M+(5-3\cos2\alpha)m)\ell} & 0 & 0\\ \end{array}\right] \left[\begin{array}{c} r\\ \theta-\theta^*\\ \dot{r}\\ \dot{\theta} \end{array}\right]}\\ \displaystyle{+ \left[\begin{array}{c} 0\\ 0\\ \frac{8}{8M+(5-3\cos2\alpha)m}\\ \frac{6\cos\alpha}{(8M+(5-3\cos2\alpha)m)\ell} \end{array}\right] (F-F^*)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-93deb9744dd26e8ee2880e1528f961ab_l3.png "Rendered by QuickLaTeX.com")
![(4.1)\quad \begin{array}{l} \displaystyle{\underbrace{ \left[\begin{array}{ccc} (\frac{4}{3}m_1+4m_2)\ell_1^2 & 2m_2\ell_1\ell_2\cos(\theta_2-\theta_1)\\ 2m_2\ell_1\ell_2\cos(\theta_2-\theta_1) & \frac{4}{3}m_2\ell_2^2 \end{array}\right] }_{M(\xi_1)} \underbrace{ \left[\begin{array}{c} \ddot{\theta}_1 \\ \ddot{\theta}_2 \end{array}\right] }_{\dot{\xi}_2}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0 & -2m_2\ell_1\ell_2\sin(\theta_2-\theta_1) \dot{\theta}_2\\ 2m_2\ell_1\ell_2\sin(\theta_2-\theta_1) \dot{\theta}_1 & 0\\ \end{array}\right] }_{C(\xi_1,\xi_2)} \underbrace{ \left[\begin{array}{c} \dot{\theta}_1 \\ \dot{\theta}_2 \end{array}\right] }_{\dot{\xi}_1}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} -(m_1+2m_2)\ell_1g\sin\theta_1\\ -m_2\ell_2g\sin\theta_2 \end{array}\right] }_{G(\xi_1)} = \underbrace{ \left[\begin{array}{c} 1 \\ 0 \end{array}\right] \tau}_{\tilde{\tau}}} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-76a26f1d085c39daa570b8cee71ac8eb_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(4.3)\quad \frac{d}{dt} \left[\begin{array}{l} \xi_1 \\ \xi_2 \end{array}\right] = \left[\begin{array}{l} \xi_2 \\ M^{-1}(\xi_1)(\tilde{\tau}-C(\xi_1,\xi_2)\dot{\xi}_1}-G(\xi_1)) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ed617e1b892b0fac0fb9a23698e93c1a_l3.png "Rendered by QuickLaTeX.com")
 の場合の平衡状態(4.2a):
の場合の平衡状態(4.2a):![(4.5a)\quad \begin{array}{l} \displaystyle{\frac{d}{dt}\left[\begin{array}{c} \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right] =}\\ \displaystyle{\left[\begin{array}{cccc} 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 1\\ \frac{3(m_1+2m_2)g}{(4m_1+3m_2)\ell_1} & -\frac{9m_2g}{2(4m_1+3m_2)\ell_1} & 0 & 0\\ -\frac{9(m_1+2m_2)g}{2(4m_1+3m_2)\ell_1} & \frac{9m_2g}{(4m_1+3m_2)\ell_2} & 0 & 0\\ \end{array}\right] \left[\begin{array}{c} \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right]}\\ \displaystyle{+ \left[\begin{array}{c} 0\\ 0\\ \frac{6}{2(4m_1+3m_2)\ell_1^2}\\ -\frac{9}{2(4m_1+3m_2)\ell_1\ell_2} \end{array}\right] (\tau-\tau^*)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a11a4d24890d0850335707e48115c732_l3.png "Rendered by QuickLaTeX.com")
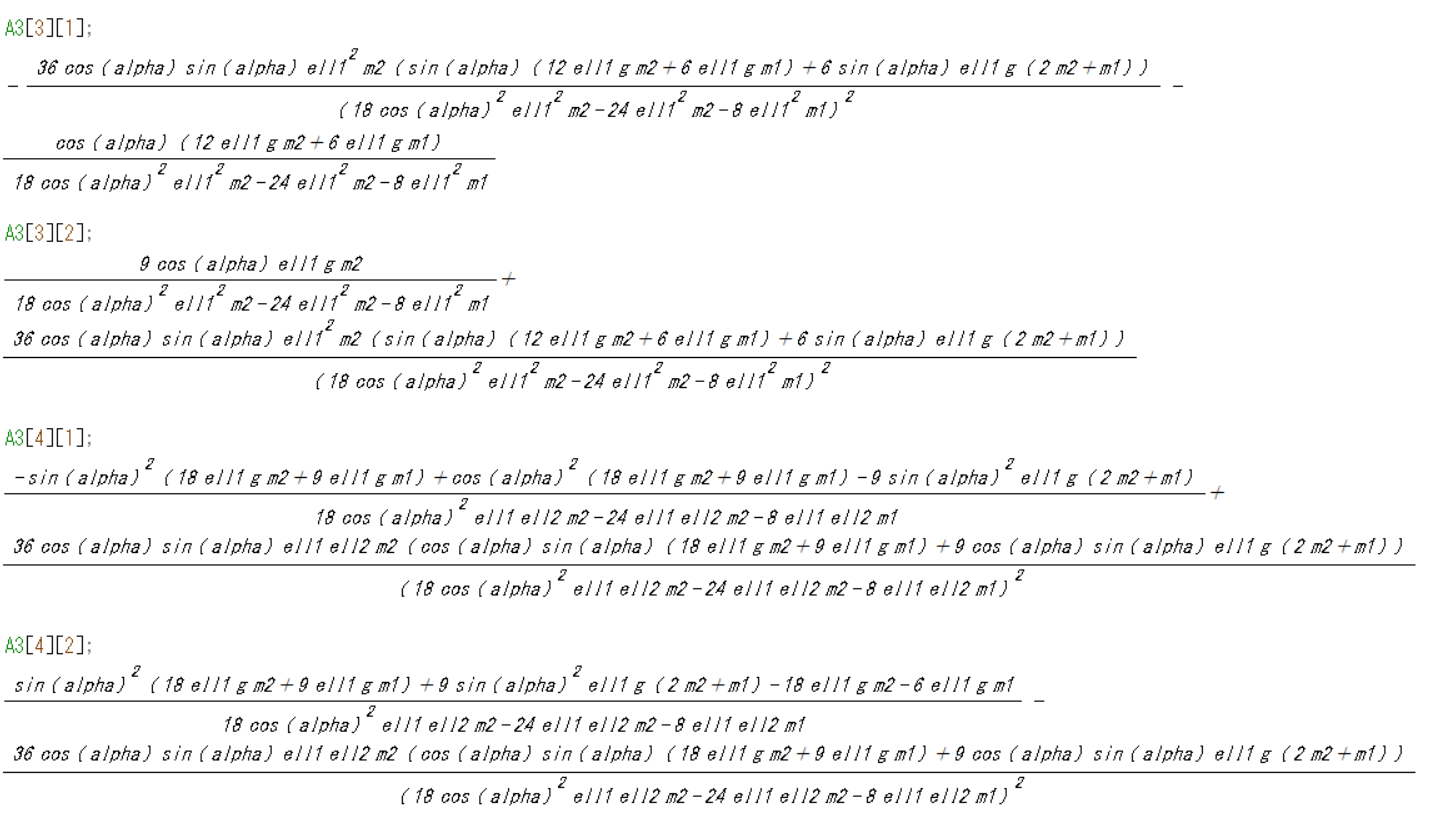
 の場合の平衡状態(4.2a):
の場合の平衡状態(4.2a):![(4.5b)\quad \begin{array}{l} \displaystyle{\frac{d}{dt}\left[\begin{array}{c} \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right] =}\\ \displaystyle{\left[\begin{array}{cccc} 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 1\\ a_{31}(\alpha) & a_{32}(\alpha) & 0 & 0\\ a_{41}(\alpha) & a_{42}(\alpha) & 0 & 0 \end{array}\right] \left[\begin{array}{c} \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right]}\\ \displaystyle{+ \left[\begin{array}{c} 0\\ 0\\ \frac{6}{2(4m_1+3(4-3\cos^2\alpha)m_2)\ell_1^2}\\ -\frac{6}{2(4m_1+3(4-3\cos^2\alpha)m_2)\ell_1\ell_2} \end{array}\right] (\tau-\tau^*)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bbff369ea90195fe12e62e338448cbcd_l3.png "Rendered by QuickLaTeX.com")
![(5.1)\quad \begin{array}{l} \displaystyle{\underbrace{ \left[\begin{array}{ccc} M+m_1+m_2 & (m_1+2m_2)\ell_1\cos\theta_1 & m_2\ell_2\cos\theta_2\\ (m_1+2m_2)\ell_1\cos\theta_1 & (\frac{4}{3}m_1+4m_2)\ell_1^2 & 2m_2\ell_1\ell_2\cos(\theta_2-\theta_1)\\ m_2\ell_2\cos\theta_2 & 2m_2\ell_1\ell_2\cos(\theta_2-\theta_1) & \frac{4}{3}m_2\ell_2^2 \end{array}\right] }_{M(\xi_1)} \underbrace{ \left[\begin{array}{c} \ddot{r} \\ \ddot{\theta}_1 \\ \ddot{\theta}_2 \end{array}\right] }_{\dot{\xi}_2}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0 & -(m_1+2m_2)\ell_2\sin\theta_2 \dot{\theta}_1 & -m_2\ell_2\sin\theta_2 \dot{\theta}_2\\ 0 & 0 & 2m_2\ell_1\ell_2\sin(\theta_2-\theta_1) \dot{\theta}_2\\ 0 & 2m_2\ell_1\ell_2\sin(\theta_2-\theta_1) \dot{\theta}_1 & 0\\ \end{array}\right] }_{C(\xi_1,\xi_2)} \underbrace{ \left[\begin{array}{c} \dot{r} \\ \dot{\theta}_1 \\ \dot{\theta}_2 \end{array}\right] }_{\dot{\xi}_1}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0 \\ (m_1+3m_2)\ell_1g\sin\theta_1\\ -m_2\ell_2g\sin\theta_2 \end{array}\right] }_{G(\xi_1)} = \underbrace{ \left[\begin{array}{c} 1 \\ 0 \\ 0 \end{array}\right] F}_{\tilde{F}} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-31c39d9c40fa5f71f3c50512937de667_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(5.3)\quad \frac{d}{dt} \left[\begin{array}{l} \xi_1 \\ \xi_2 \end{array}\right] = \left[\begin{array}{l} \xi_2 \\ M^{-1}(\xi_1)(\tilde{F}-C(\xi_1,\xi_2)\dot{\xi}_1}-G(\xi_1)) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5e0178287e8a843a2c71cba4423ef44f_l3.png "Rendered by QuickLaTeX.com")
![(5.5)\quad \begin{array}{l} \displaystyle{\frac{d}{dt}\left[\begin{array}{c} r\\ \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{r}\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right] =}\\ \displaystyle{\left[\begin{array}{cccccc} 0 & 0 & 0 & 1 & 0 & 0\\ 0 & 0 & 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 0 & 0 & 1\\ 0 & -\frac{3m_1g}{4M+m_1+m_2} & -\frac{3m_2g}{4M+m_1+m_2} & 0 & 0 & 0\\ 0 & \frac{3(4m+4m_1+m_2)g}{4(4M+m_1+m_2)\ell_1} & \frac{9m_2g}{4(4M+m_1+m_2)\ell_1} & 0 & 0& 0\\ 0 & \frac{9gm_1}{4(4M+m_1+m_2)\ell_2} & \frac{3(4m+m_1+4m_2)g}{4(4M+m_1+m_2)\ell_2} & 0 & 0& 0\\ \end{array}\right] \left[\begin{array}{c} r\\ \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{r}\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right]}\\ \displaystyle{+ \left[\begin{array}{c} 0\\ 0\\ 0\\ \frac{4}{4M+m_1+m_2}\\ -\frac{3}{(4M+m_1+m_2)\ell_1}\\ -\frac{3}{(4M+m_1+m_2)\ell_2} \end{array}\right] F \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8554645545e9bed2d603331493dd90b7_l3.png "Rendered by QuickLaTeX.com")
![(6.1)\quad \begin{array}{l} \displaystyle{\underbrace{ \left[\begin{array}{ccc} M+m_1+m_2 & m_1\ell_1\cos\theta_1 & -m_2\ell_2\cos\theta_2\\ m_1\ell_1\cos\theta_1 & \frac{4}{3}m_1\ell_1^2 & 0\\ -m_2\ell_2\cos\theta_2 & 0 & \frac{4}{3}m_2\ell_2^2 \end{array}\right] }_{M(\xi_1)} \underbrace{ \left[\begin{array}{c} \ddot{r} \\ \ddot{\theta}_1 \\ \ddot{\theta}_2 \end{array}\right] }_{\dot{\xi}_2}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0 & -m_1\ell_2\sin\theta_2 \dot{\theta}_1 & -m_2\ell_2\sin\theta_2 \dot{\theta}_2\\ 0 & 0 & 0\\ 0 & 0 & 0\\ \end{array}\right] }_{C(\xi_1,\xi_2)} \underbrace{ \left[\begin{array}{c} \dot{r} \\ \dot{\theta}_1 \\ \dot{\theta}_2 \end{array}\right] }_{\dot{\xi}_1}}\\ \displaystyle{ +\underbrace{ \left[\begin{array}{ccc} 0 \\ -m_1\ell_1g\sin\theta_1\\ -m_2\ell_2g\sin\theta_2 \end{array}\right] }_{G(\xi_1)} = \underbrace{ \left[\begin{array}{c} 1 \\ 0 \\ 0 \end{array}\right] F}_{\tilde{F}} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-93481c5d4d113644bf7b152b46e9779f_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(6.3)\quad \frac{d}{dt} \left[\begin{array}{l} \xi_1 \\ \xi_2 \end{array}\right] = \left[\begin{array}{l} \xi_2 \\ M^{-1}(\xi_1)(\tilde{F}-C(\xi_1,\xi_2)\dot{\xi}_1}-G(\xi_1)) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f9fbb15ced10e0dab00dfb8c25024a6a_l3.png "Rendered by QuickLaTeX.com")
![(6.5)\quad \begin{array}{l} \displaystyle{ \frac{d}{dt}\left[\begin{array}{c} r\\ \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{r}\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right] =}\\ \displaystyle{ \left[\begin{array}{cccccc} 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & -\frac{3m_1g}{Mm_1+m_1^2+(3M+m1)m_2} & -\frac{3m_2g}{Mm_1+m_1^2+(3M+m1)m_2} \\ 0 & \frac{3(4Mm_1+4m_1^2+3m_2^2+3(18M+13m_1)m_2)g}{(4Mm_1+m_1^2+(3M+m1)m_2)\ell_1} & \frac{9(2M+m_1)m_2g}{(4Mm_1+m_1^2+(3M+m1)m_2)\ell_1} \\ 0 & \frac{9(2Mm_1+m_1^2+3(2M+m_1)m_2)g}{(4Mm_1+m_1^2+(3M+m_1)m_2)\ell_2} & \frac{3(4Mm_1+m_1^2+12(3M+m_1)m_2)g}{(4Mm_1+m_1^2+(3M+m_1)m_2)\ell_2} \\ \end{array}\right.}\\ \displaystyle{\left.\begin{array}{cccccc} 1 & 0 & 0\\ 0 & 1 & 0\\ 0 & 0 & 1\\ 0 & 0 & 0\\ 0 & 0 & 0\\ 0 & 0 & 0\\ \end{array}\right] \left[\begin{array}{c} r\\ \theta_1-\theta_1^*\\ \theta_2-\theta_2^*\\ \dot{r}\\ \dot{\theta}_1\\ \dot{\theta}_2 \end{array}\right]}\\ \displaystyle{+ \left[\begin{array}{c} 0\\ 0\\ 0\\ \frac{4m_1+3m_2}{4Mm_1+m_1^2+(3M+m1)m_2}\\ -\frac{3(2m_1+m2)}{2Mm_1+m_1^2+(3M+m1)m_2}\\ \frac{3m_1}{2(4Mm_1+m_1^2+(3M+m_1)m_2)\ell_2} \end{array}\right] F} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0ded80f948ddab3f936f91c1c7ea13d2_l3.png "Rendered by QuickLaTeX.com")
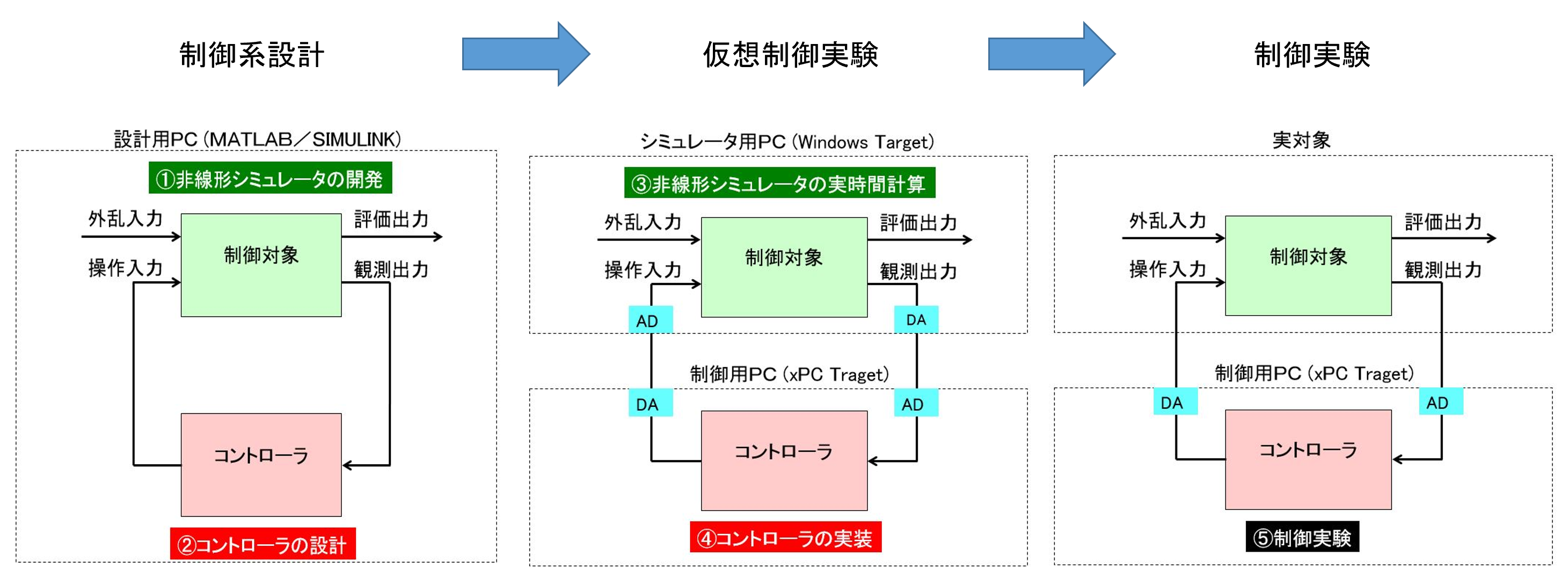 図1 HILS アプローチ
図1 HILS アプローチ 図2 単振り子
図2 単振り子
 は振り子の長さ、
は振り子の長さ、 は重力加速度、
は重力加速度、 は時刻
は時刻 とします。
とします。



 のときは(平衡状態近傍では)両者に差異は見られませんが、90
のときは(平衡状態近傍では)両者に差異は見られませんが、90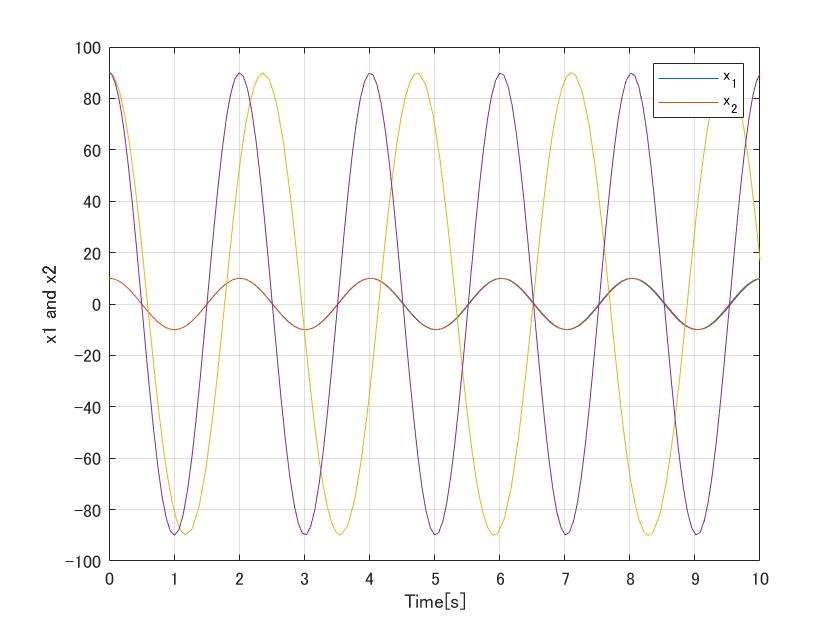 図3 単振り子の振動シミュレーション(モデルが線形か非線形か、初期状態を平衡状態周辺にとるかによる相違)
図3 単振り子の振動シミュレーション(モデルが線形か非線形か、初期状態を平衡状態周辺にとるかによる相違)![\displaystyle{(6)\quad \underbrace{ \left[\begin{array}{l} \dot{\theta}(t) \\ \dot{\omega}(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{l} \omega(t) \\ -\frac{g}{L}\sin\theta(t) \end{array}\right] }_{f(x(t))} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ded67215525ba40fa5155a4367ed7405_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(7)\quad \underbrace{ \left[\begin{array}{l} \dot{\theta}(t) \\ \dot{\omega}(t) \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\frac{g}{L}&0 \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{l} \theta(t) \\ \omega(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ed5a0aa97035fe65dba8b64944a4a569_l3.png "Rendered by QuickLaTeX.com")
 図4 水タンクTANK
図4 水タンクTANK  、
、 、
、 とします。タンクの断面積を
とします。タンクの断面積を とすると、運動方程式は次式となります。
とすると、運動方程式は次式となります。
 と平衡入力
と平衡入力 が次式のように求まります。
が次式のように求まります。

 図5 TANKの非線形シミュレータ
図5 TANKの非線形シミュレータ に対して零状態
に対して零状態

 図6 TANKの線形シミュレータ
図6 TANKの線形シミュレータ のとき、水位
のとき、水位 の平衡状態にあるとします。今、バケツで水を入れたため、水位が
の平衡状態にあるとします。今、バケツで水を入れたため、水位が になったとします。このとき、平衡状態に戻る過程を非線形シミュレータと線形シミュレータで比較した結果を図7に示します。
になったとします。このとき、平衡状態に戻る過程を非線形シミュレータと線形シミュレータで比較した結果を図7に示します。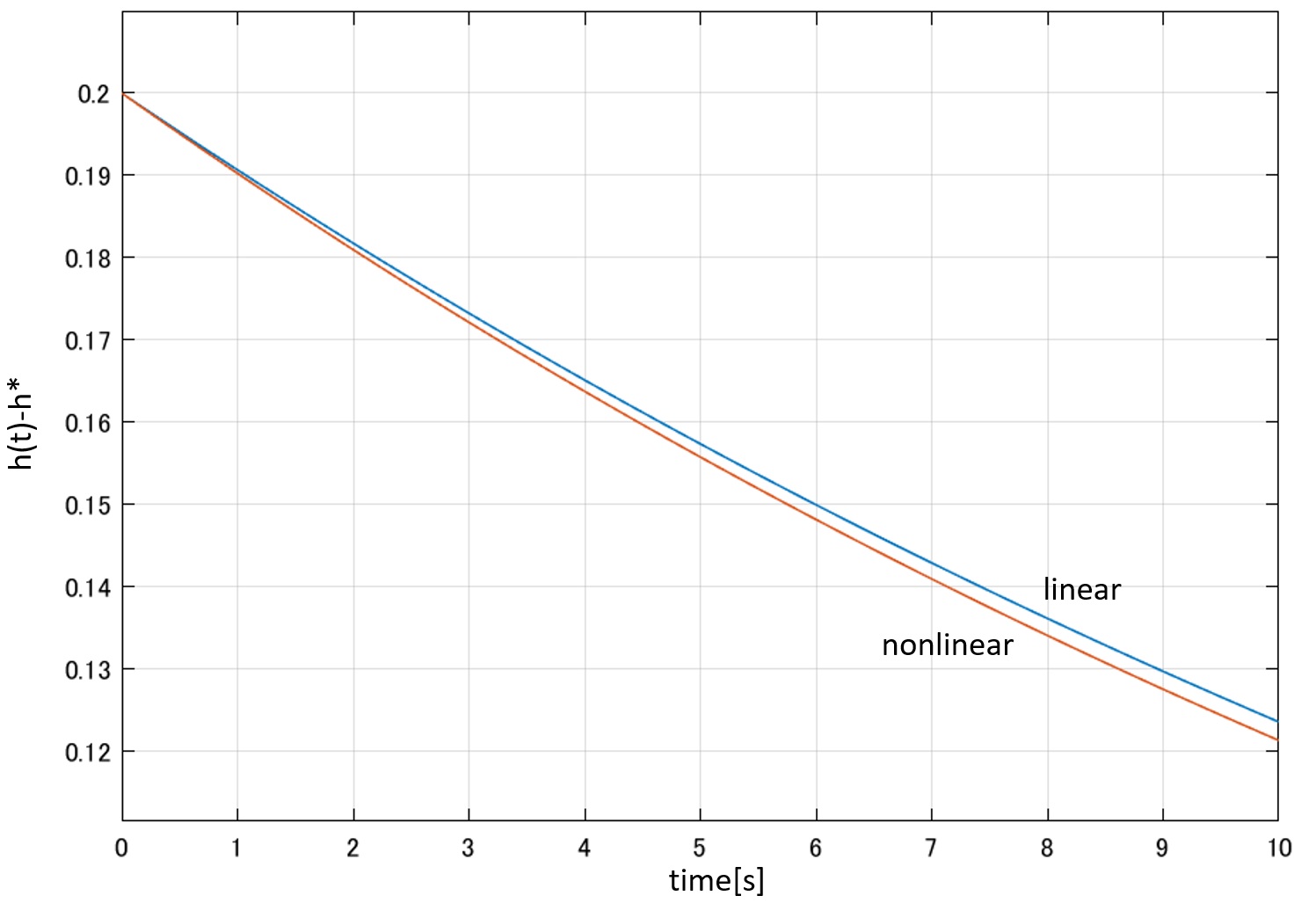 図7 TANKの非線形応答と線形応答の比較
図7 TANKの非線形応答と線形応答の比較 図8 TANKの非線形シミュレータと線形シミュレータ
図8 TANKの非線形シミュレータと線形シミュレータ を状態変数、
を状態変数、 を入力変数として、運動方程式から、次のような連立1階微分方程式で表される非線形状態方程式を得ます。
を入力変数として、運動方程式から、次のような連立1階微分方程式で表される非線形状態方程式を得ます。
 が状態変数ベクトル、
が状態変数ベクトル、 が入力変数ベクトルです。
が入力変数ベクトルです。![\displaystyle{(14)\quad \boxed{\dot{\xi}=f(\xi,\zeta)}\ \Leftrightarrow\ \underbrace{ \left[\begin{array}{l} \dot{\xi}_1 \\ \vdots \\ \dot{\xi}_n \end{array}\right] }_{\dot{\xi}} = \underbrace{ \left[\begin{array}{l} f_1(\xi,\zeta) \\ \quad\vdots \\ f_n(\xi,\zeta) \end{array}\right] }_{f(\xi,\zeta)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-92634287f13e8775d2c2a6ec25c7567c_l3.png "Rendered by QuickLaTeX.com")
 と平衡入力
と平衡入力 は
は
 を1次近似すると次式を得ます。
を1次近似すると次式を得ます。
![\displaystyle{(17)\quad A=\frac{\partial\,f(\xi^*,\zeta^*)}{\partial\,\xi}= \left[\begin{array}{ccc} \frac{\partial f_1(\xi^*,\zeta^*)}{\partial \xi_1}&\cdots& \frac{\partial f_1(\xi^*,\zeta^*)}{\partial \xi_n}\\ \vdots&\ddots&\vdots\\ \frac{\partial f_n(\xi^*,\zeta^*)}{\partial \xi_1}&\cdots& \frac{\partial f_n(\xi^*,\zeta^*)}{\partial \xi_n} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9cbb1299b9fef4d94b388578973f2dd3_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(18)\quad B=\frac{\partial\,f(\xi^*,\zeta^*)}{\partial\,\zeta}= \left[\begin{array}{ccc} \frac{\partial f_1(\xi^*,\zeta^*)}{\partial \zeta_1}&\cdots& \frac{\partial f_1(\xi^*,\zeta^*)}{\partial \zeta_m}\\ \vdots&\ddots&\vdots\\ \frac{\partial f_n(\xi^*,\zeta^*)}{\partial \zeta_1}&\cdots& \frac{\partial f_n(\xi^*,\zeta^*)}{\partial \zeta_m} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-02d8fb9441471b4730389431ccc6f27c_l3.png "Rendered by QuickLaTeX.com")

 にあることを意味し、これは平衡入力
にあることを意味し、これは平衡入力 によってもたらされるので「零入力
によってもたらされるので「零入力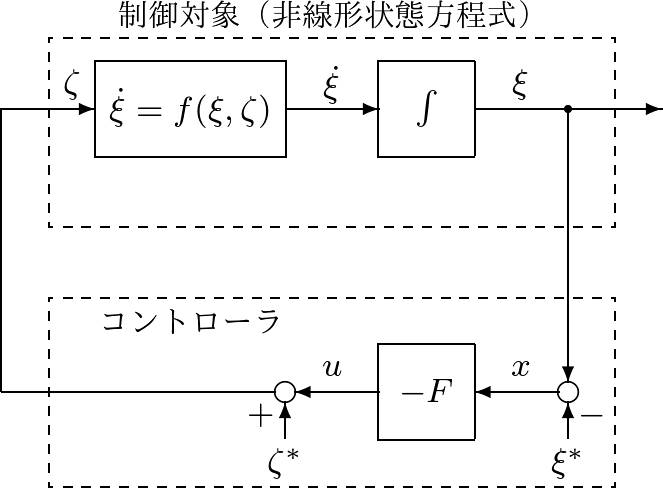
![\displaystyle{(20)\quad \underbrace{ \frac{d}{dt} \left[\begin{array}{cc} \xi_1-\xi_1^* \\ \xi_2-\xi_2^* \end{array}\right] }_{\dot{x}=\dot{\xi}-\dot{\xi}^*}= \underbrace{ \left[\begin{array}{cc} \frac{\partial f_1(\xi^*,\tau^*)}{\partial \xi_1} & \frac{\partial f_1(\xi^*,\tau^*)}{\partial \xi_2} \\ \frac{\partial f_2(\xi^*,\tau^*)}{\partial \xi_1} & \frac{\partial f_2(\xi^*,\tau^*)}{\partial \xi_2} \end{array}\right] }_{A=\frac{\partial f(\xi^*,\tau^*)}{\partial \xi}} \underbrace{ \left[\begin{array}{l} \xi_1-\xi_1^* \\ \xi_2-\xi_2^* \end{array}\right] }_{x=\xi-\xi^*} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f2c5af558fdbb6c9d48962d44eed85a8_l3.png "Rendered by QuickLaTeX.com")

 は
は は
は![\displaystyle{(22)\quad \underbrace{\frac{d}{dt} \left[\begin{array}{l} \xi_1 \\ \xi_2 \end{array}\right]}_{\dot{\xi}} =\underbrace{ \left[\begin{array}{l} \xi_2 \\ M^{-1}(\xi_1)(\zeta-C(\xi_1,\xi_2)\xi_2-G(\xi_1)) \end{array}\right]}_{f(\xi,\zeta)}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5135df93ea761445ca840c16e381cc07_l3.png "Rendered by QuickLaTeX.com")
![\xi^*= \left[\begin{array}{l} \xi^*_1 \\ \xi^*_2 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b2e8fb0c2029e2f9c4a9ec4f3801cd5f_l3.png "Rendered by QuickLaTeX.com") と平衡入力
と平衡入力
![\displaystyle{(24)\quad \underbrace{ \frac{d}{dt} \left[\begin{array}{cc} \xi_1-\xi_1^* \\ \xi_2-\xi_2^* \end{array}\right] }_{\dot{x}}= \underbrace{ \left[\begin{array}{cc} 0 & I_n \\ A_{21} & A_{22} \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{l} \xi_1-\xi_1^* \\ \xi_2-\xi_2^* \end{array}\right] }_{x}+ \underbrace{ \left[\begin{array}{cc} 0 \\ B_2 \end{array}\right] }_{B} \underbrace{ (\zeta-\zeta^*) }_{u} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-367b63505bbc335acbc7077f5650a169_l3.png "Rendered by QuickLaTeX.com")

 は棒の長さ、
は棒の長さ、 は、まず重心回りの慣性モーメント
は、まず重心回りの慣性モーメント![\displaystyle{(2)\quad J_0=\int_{-\ell}^{\ell}r^2\,dm=\int_{-\ell}^{\ell}r^2\,\frac{m}{2\ell}dr=\frac{m}{2\ell}\left[\frac{r^3}{3}\right]_{-\ell}^{\ell}=\frac{1}{3}m\ell^2 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5b186df97274bc07ea869b8969f417a2_l3.png "Rendered by QuickLaTeX.com")


 の
の における展開式
における展開式
 として
として
 )、
)、 として
として
![\displaystyle{(8)\quad \underbrace{ \left[\begin{array}{l} \dot{\theta}(t) \\ \dot{\omega}(t) \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\frac{3g}{4\ell}&0 \end{array}\right] }_{A_\alpha} \underbrace{ \left[\begin{array}{l} \theta(t) \\ \omega(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-aab7f16339e56d265534f36b3b8a9366_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(9)\quad \underbrace{ \frac{d}{dt} \left[\begin{array}{l} \theta(t)-\pi \\ \omega(t)-0 \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ \frac{3g}{4\ell}&0 \end{array}\right] }_{A_\beta} \underbrace{ \left[\begin{array}{l} \theta(t)-\pi \\ \omega(t)-0 \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-89b5ecb0d715edc56311f92b25c00853_l3.png "Rendered by QuickLaTeX.com")

 図2 剛体振り子と同じ周期をもつ単振り子の長さは?
図2 剛体振り子と同じ周期をもつ単振り子の長さは?
 はそれぞれ時刻
はそれぞれ時刻 は時刻
は時刻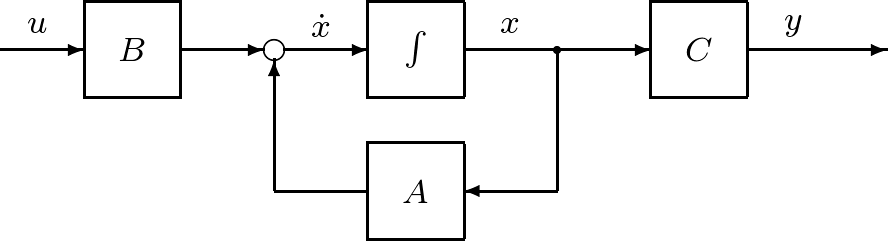 図1 状態空間表現(1)のブロック線図
図1 状態空間表現(1)のブロック線図 図2 マス・バネ・ダンパからなる機械系
図2 マス・バネ・ダンパからなる機械系
 はドアの質量,
はドアの質量, は時刻
は時刻 は時刻
は時刻

 を定義すると
を定義すると
![\displaystyle{(6)\quad \underbrace{ \left[\begin{array}{c} \dot{r}(t) \\ \dot{v}(t) \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\frac{K}{M} & -\frac{D}{M} \end{array}\right] }_A \underbrace{ \left[\begin{array}{c} r(t) \\ v(t) \end{array}\right] }_{x(t)}+ \underbrace{ \left[\begin{array}{c} 0 \\ \frac{1}{M} \end{array}\right] }_B u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0f9eee4a83cd00ce26d47f602e1c5d9a_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(7)\quad x^*= \left[\begin{array}{c} 0 \\ 0 \end{array}\right],\ u^*=0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f4671d16d42c1ab159c18cf6487d5c29_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(8)\quad \underbrace{r(t)}_{y(t)}= \underbrace{ \left[\begin{array}{cc} 1 & 0 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} r(t) \\ v(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e6aa71a57291ccf1f09944a3b8846465_l3.png "Rendered by QuickLaTeX.com")
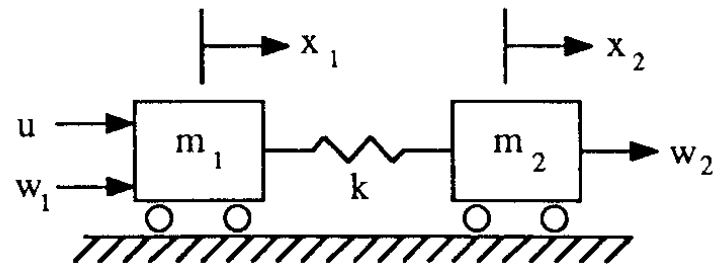

![\displaystyle{(10)\quad \frac{d}{dt}\left[\begin{array}{c} x_1\\ x_2\\ \dot{x}_1\\ \dot{x}_2 \end{array}\right] = \left[\begin{array}{cccc} 0 & 0 & 1 & 0\\ 0 & 0 & 0 & 1\\ a_{31} & a_{32} & a_{33} & a_{34} \\ a_{41} & a_{42} & a_{43} & a_{44} \end{array}\right] \left[\begin{array}{c} x_1\\ x_2\\ \dot{x}_1\\ \dot{x}_2 \end{array}\right] + \left[\begin{array}{ccc} 0 & 0 & 0\\ 0 & 0 & 0\\ b_{31} & b_{32} & b_{33}\\ b_{41} & b_{42} & b_{43} \end{array}\right] \left[\begin{array}{c} u\\ w_1\\ w_2 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-797fe9e960cb81c588217b74e17d70fb_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(2)\quad \boxed{ \underbrace{ \left[\begin{array}{c} \dot{x}_1(t) \\ \dot{x}_2(t) \end{array}\right] }_{\dot x} = \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} x_1(t) \\ x_2(t) \end{array}\right] }_{x} + \underbrace{ \left[\begin{array}{c} 0 \\ K\omega_n^2 \end{array}\right] }_{B} u(t) }}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-04009ed3d0edf5fa5a2060e9508b3422_l3.png "Rendered by QuickLaTeX.com")



 を行うと、次の状態空間表現を得ます。
を行うと、次の状態空間表現を得ます。![\displaystyle{(3)\quad \boxed{\left\{\begin{array}{l} \left[\begin{array}{c} \dot{x}_1(t) \\ \dot{x}_2(t) \end{array}\right]= \left[\begin{array}{cc} A_1 & B_1C_2 \\ 0 & A_2 \end{array}\right] \left[\begin{array}{c} x_1(t) \\ x_2(t) \end{array}\right] + \left[\begin{array}{cc} B_1D_2 \\ B_2 \end{array}\right] u_2(t) \\ y_1(t)= \left[\begin{array}{cc} C_1 & D_1C_2 \end{array}\right] \left[\begin{array}{c} x_1(t) \\ x_2(t) \end{array}\right] +D_1D_2u_2(t) \end{array}\right.} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-36963521878ef7dd0808b96bae3bfff3_l3.png "Rendered by QuickLaTeX.com")

 に、正則行列
に、正則行列





![(4)\quad \begin{array}{l} \displaystyle{x(t)=e^{(a-bf)t}x(0)+\int_0^t e^{(a-bf)(t-\tau)}w\,d\tau}\\ \displaystyle{=e^{(a-bf)t}x(0)+\left[\frac{1}{-(a-bf)}e^{(a-bf)(t-\tau)}w\right]_0^t}\\ \displaystyle{=e^{(a-bf)t}x(0)+\frac{w}{-(a-bf)}(1-e^{(a-bf)t})}\\ \displaystyle{\rightarrow \frac{w}{-(a-bf)}\ne 0 \quad (t\rightarrow\infty)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-87ff2adf2a1f8bd25d390b2196807faa_l3.png "Rendered by QuickLaTeX.com")






![\displaystyle{(11)\quad {\underbrace{ \left[\begin{array}{cc} \dot{x}(t) \\ \dot{x}_I(t) \end{array}\right] }_{\dot{x}_E} = \underbrace{ \left[\begin{array}{cc} a-bf & -bf_I \\ 1 & 0 \end{array}\right] }_{A_{EF}} \underbrace{ \left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] }_{x_E} + \underbrace{ \left[\begin{array}{cc} w \\ 0 \end{array}\right] }_{w_E}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-31b2a3c2e865a17fd4319135d80cb684_l3.png "Rendered by QuickLaTeX.com")
 の特性方程式は
の特性方程式は
 と
と を適切に選んでおきます。
を適切に選んでおきます。
![(14)\quad \begin{array}{l} \displaystyle{x_E(t)=\exp(A_{EF}t)x_E(0)+\int_0^t\exp(A_{EF}(t-\tau))w_E\,d\tau}\\ \displaystyle{=\exp(A_{EF}t)x_E(0)+\left[-\exp(A_{EF}(t-\tau))A_{EF}^{-1}w_E\right]_0^t}\\ \displaystyle{=\exp(A_{EF}t)x_E(0)-(I_2-\exp(A_{EF}t))A_{EF}^{-1}w_E}\\ \displaystyle{=\exp(A_{EF}t)(x_E(0)+A_{EF}^{-1}w_E)-A_{EF}^{-1}w_E}\\ \displaystyle{\rightarrow -A_{EF}^{-1}w_E \quad (t\rightarrow\infty)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3bca83642ec9ba9f633fe5e502d53148_l3.png "Rendered by QuickLaTeX.com")
![(15)\quad \begin{array}{l} \displaystyle{\left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] \rightarrow - \left[\begin{array}{cc} a-bf & -bf_I \\ 1 & 0 \end{array}\right]^{-1} \left[\begin{array}{cc} w \\ 0 \end{array}\right]}\\ \displaystyle{ = -\frac{1}{bf_I} \left[\begin{array}{cc} 0 & bf_I \\ -1 & a-bf \end{array}\right] \left[\begin{array}{cc} w \\ 0 \end{array}\right] = \left[\begin{array}{cc} 0 \\ \frac{1}{bf_I}w \end{array}\right]} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b2e96500c3db9199db1fbc40cbaa0029_l3.png "Rendered by QuickLaTeX.com")


 は目標値)、上述の積分動作を次のように変えてみます。
は目標値)、上述の積分動作を次のように変えてみます。

![\displaystyle{(20)\quad \boxed{\underbrace{ \left[\begin{array}{cc} \dot{x}(t) \\ \dot{x}_I(t) \end{array}\right] }_{\dot{x}_E} = \underbrace{ \left[\begin{array}{cc} a-bf & -bf_I \\ 1 & 0 \end{array}\right] }_{A_{EF}} \underbrace{ \left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] }_{x_E} + \underbrace{ \left[\begin{array}{cc} w \\ -r_c \end{array}\right] }_{w_E}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ddef16b35db1273870bc586e72b3bb5a_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(21)\quad \begin{array}{l} \displaystyle{\left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] \rightarrow - \left[\begin{array}{cc} a-bf & -bf_I \\ 1 & 0 \end{array}\right]^{-1} \left[\begin{array}{cc} w \\ -r_c \end{array}\right]}\\ \displaystyle{= -\frac{1}{bf_I} \left[\begin{array}{cc} 0 & bf_I \\ -1 & a-bf \end{array}\right] \left[\begin{array}{cc} w \\ -r_c \end{array}\right] = \left[\begin{array}{cc} r_c \\ \frac{1}{bf_I}w+\frac{a-bf}{bf_I}r_c \end{array}\right]} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f812ff0b7b34a62587cc56d0da3ad5fd_l3.png "Rendered by QuickLaTeX.com")


 を、図2のように、フィードフォワードしておくことが考えられます。
を、図2のように、フィードフォワードしておくことが考えられます。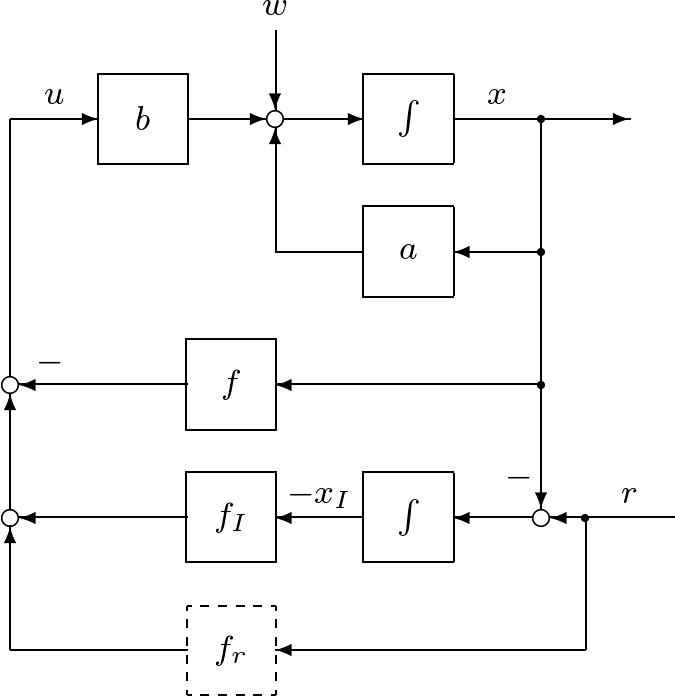
 、
、 、
、 、
、 、
、 、
、 として、次のシミュレーション結果を得ます。
として、次のシミュレーション結果を得ます。 図2 図1のシミュレーション例
図2 図1のシミュレーション例




 を用いて
を用いて

![\displaystyle{(31)\quad \boxed{ \begin{array}{l} \left[\begin{array}{c} \dot{\hat{x}}(t) \\ \dot{x}_I(t) \end{array}\right] = \underbrace{ \left[\begin{array}{cc} a-hc-bf & -bf_I \\ 0 & 0 \end{array}\right] }_{A_K} \left[\begin{array}{c} \hat{x}(t) \\ x_I(t) \end{array}\right] + \underbrace{ \left[\begin{array}{cc} h & 0\\ 1 & -1 \end{array}\right] }_{B_K} \left[\begin{array}{c} y(t) \\ r_c \end{array}\right]\\ u(t)= \underbrace{- \left[\begin{array}{cc} f & f_I \end{array}\right] }_{C_K} \left[\begin{array}{c} \hat{x}(t) \\ x_I(t) \end{array}\right] \end{array}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c9a64fdc6b3c7ee88c4b4ccbe8c58b7b_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(33)\quad \left[\begin{array}{c} \dot{x}(t) \\ \dot{x}_I(t) \\ \dot{\hat{x}}(t) \end{array}\right] = \left[\begin{array}{ccc} a & -bf_I & -bf \\ c & 0 & 0 \\ hc & -bf_I & a-hc-bf \end{array}\right] \left[\begin{array}{c} x(t) \\ x_I(t) \\ \hat{x}(t) \end{array}\right] + \left[\begin{array}{c} w \\ -r_c \\ 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ec175798327a5fc11b68b91a22172f0d_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(34)\quad \left[\begin{array}{c} x(t) \\ x_I(t) \\ e(t) \end{array}\right] = \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 0 \\ -1 & 0 & 1 \end{array}\right] \left[\begin{array}{c} x(t) \\ x_I(t) \\ \hat{x}(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7ca97b463935b7f71dea225ffcb573f2_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(35)\quad \boxed{ \left[\begin{array}{c} \dot{x}(t) \\ \dot{x}_I(t) \\\hline \dot{e}(t) \end{array}\right] = \underbrace{ \left[\begin{array}{cc|c} a-bf & -bf_I & -bf \\ c & 0 & 0 \\\hline 0 & 0 & a-hc \end{array}\right] }_{ A_{EF}'= \left[\begin{array}{c|c} A_{EF} & - \left[\begin{array}{cc} bf \\ 0 \end{array}\right] \\[5mm] \hline 0 & \widehat{a} \end{array}\right] } \left[\begin{array}{c} x(t) \\ x_I(t) \\\hline e(t) \end{array}\right] + \left[\begin{array}{c} w \\ -r_c \\\hline -w \end{array}\right]} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3a0c12a07d48d608c414bfef747b7ae3_l3.png "Rendered by QuickLaTeX.com")
 と
と![\displaystyle{(36)\quad \left[\begin{array}{c} x(t) \\ x_I(t) \\\hline e(t) \end{array}\right] \ \rightarrow\ \underbrace{ \left[\begin{array}{c|c} A_{EF}^{-1} & -A_{EF}^{-1} \left[\begin{array}{cc} bf \\ 0 \end{array}\right] \widehat{a}^{-1} \\[5mm]\hline 0 & \widehat{a}^{-1} \end{array}\right] }_{A_{EF}'\,^{-1}} \left[\begin{array}{c} -w \\ r_c \\\hline w \end{array}\right] \quad (t\rightarrow\infty) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c8709893951656a10a2cf0aec18bef8b_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(37)\quad \begin{array}{l} \displaystyle{\left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] \rightarrow \left[\begin{array}{cc} a-bf & -bf_I \\ c & 0 \end{array}\right]^{-1} \left[\begin{array}{cc} -w-bf\widehat{a}^{-1}w\\ r_c \end{array}\right]}\\ \displaystyle{= \frac{1}{cbf_I} \left[\begin{array}{cc} 0 & bf_I \\ -c & a-bf \end{array}\right] \left[\begin{array}{cc} -w-bf\widehat{a}^{-1}w\\ r_c \end{array}\right]}\\ \displaystyle{= \left[\begin{array}{cc} \frac{1}{c}r_c \\ \frac{1}{bf_I}w+\frac{1}{f_I}f\widehat{a}^{-1}w+\frac{a-bf}{cbf_I}r_c \end{array}\right]} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a0408f31040df6a4e4b055bc9c88bc05_l3.png "Rendered by QuickLaTeX.com")



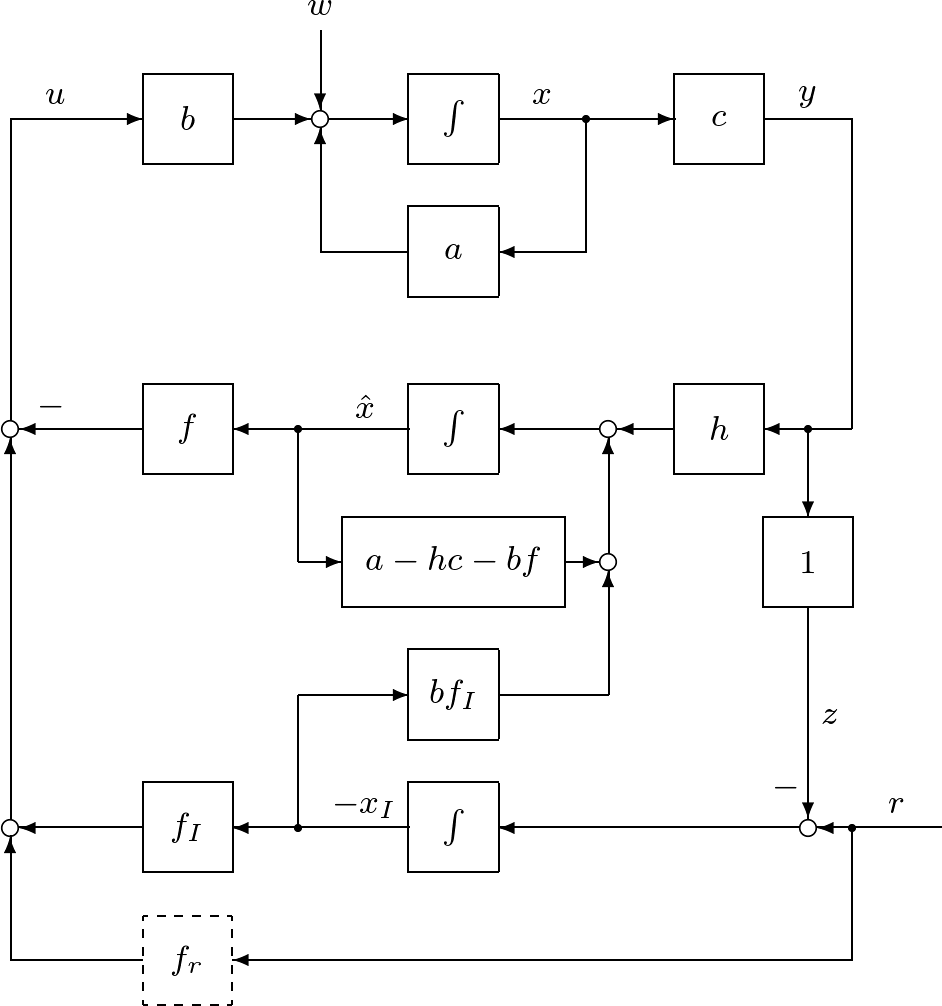 図3 積分動作を加えたオブザーバベースコントローラによる閉ループ系
図3 積分動作を加えたオブザーバベースコントローラによる閉ループ系![\displaystyle{(41)\quad \underbrace{ \left[\begin{array}{cc} \dot{x}(t) \\ \dot{x}_I(t) \end{array}\right] }_{\dot{x}_E(t)} = \underbrace{ \left[\begin{array}{cc} a-bf & -bf_I \\ c & 0 \end{array}\right] }_{A_{EF}} \underbrace{ \left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] }_{x_E(t)} + \underbrace{ \left[\begin{array}{cc} w \\ -r_c \end{array}\right] }_{w_E} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f729fc6c953923d57572c53768579876_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(43)\quad \underbrace{ \left[\begin{array}{cc} qx(t)\\ ru(t) \end{array}\right] }_{y_{E}(t)} = \underbrace{ \left[\begin{array}{cc} q & 0 \\ -rf & -rf_I \end{array}\right] }_{C_{E}} \underbrace{ \left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] }_{x_{E}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0d18a388e7b6c8f9fa04453e84d71145_l3.png "Rendered by QuickLaTeX.com")



 に、平衡入力(
に、平衡入力( に変わっていることに注意し、これとの差を表す状態方程式を考えます。まず定値外乱抑制前の状態方程式は(1)と(2)を合わせて
に変わっていることに注意し、これとの差を表す状態方程式を考えます。まず定値外乱抑制前の状態方程式は(1)と(2)を合わせて![\displaystyle{(47)\quad \underbrace{\frac{d}{dt} \left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] }_{\dot{x}_E(t)} = \underbrace{ \left[\begin{array}{cc} a & 0 \\ c & 0 \end{array}\right] }_{A_E} \underbrace{ \left[\begin{array}{cc} x(t) \\ x_I(t) \end{array}\right] }_{x_E(t)} + \underbrace{ \left[\begin{array}{cc} b \\ 0 \end{array}\right] }_{B_E} u(t) + \underbrace{ \left[\begin{array}{cc} w \\ -r_c \end{array}\right] }_{w_E} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4e152ba9118c145fdc3aa9097ad1291f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(48)\quad \underbrace{\frac{d}{dt} \left[\begin{array}{cc} x_\infty \\ x_{I\infty} \end{array}\right] }_{\dot{x}_{E\infty}=0} = \underbrace{ \left[\begin{array}{cc} a & 0 \\ c & 0 \end{array}\right] }_{A_E} \underbrace{ \left[\begin{array}{cc} x_\infty \\ x_{I\infty} \end{array}\right] }_{x_{E\infty}} + \underbrace{ \left[\begin{array}{cc} b \\ 0 \end{array}\right] }_{B_E} u_\infty + \underbrace{ \left[\begin{array}{cc} w \\ -r_c \end{array}\right] }_{w_E} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-388e3b63a548f6ae3de1bca82350d6b8_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(49)\quad \boxed{ \underbrace{\frac{d}{dt} \left[\begin{array}{cc} x(t)-x_\infty \\ x_I(t)-x_{I\infty} \end{array}\right] }_{\dot{x}_{E1}(t)} = \underbrace{ \left[\begin{array}{cc} a & 0 \\ c & 0 \end{array}\right] }_{A_{E1}} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ x_I(t)-x_{I\infty} \end{array}\right] }_{x_{E1}(t)} + \underbrace{ \left[\begin{array}{cc} b \\ 0 \end{array}\right] }_{B_{E1}} \underbrace{(u(t)-u_\infty)}_{u_{E1}(t)}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ef61060eeffd371eb2eb609612504541_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(50)\quad \underbrace{u(t)-u_\infty}_{u_{E1}(t)} =- \underbrace{ \left[\begin{array}{cc} f & f_I \end{array}\right] }_{F_E} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ x_I(t)-x_{I\infty} \end{array}\right] }_{x_{E1}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2de715ba671f8a4ff5fe87b581f7486f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(51)\quad \underbrace{\frac{d}{dt} \left[\begin{array}{cc} x(t)-x_\infty \\ x_I(t)-x_{I\infty} \end{array}\right] }_{\dot{x}_{E1}(t)} = \underbrace{ \left[\begin{array}{cc} a-bf & -bf_I \\ c & 0 \end{array}\right] }_{A_{EF}} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ x_I(t)-x_{I\infty} \end{array}\right] }_{x_{E1}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0ac4b58fae5895656374987e2e2dfb53_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(52)\quad \underbrace{ \left[\begin{array}{cc} q(x(t)-x_\infty) \\ r(u(t)-u_\infty) \end{array}\right] }_{y_{E1}(t)} = \underbrace{ \left[\begin{array}{cc} q & 0 \\ -rf & -rf_I \end{array}\right] }_{C_{E1}} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ x_I(t)-x_{I\infty} \end{array}\right] }_{x_{E1}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f6ff94e985ffd90ab5da603d6e28d94f_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(54)\quad \boxed{ \underbrace{\frac{d}{dt} \left[\begin{array}{cc} \dot{x}(t) \\ x(t)-r_c \end{array}\right] }_{\dot{x}_{E2}(t)} = \underbrace{ \left[\begin{array}{cc} a & 0 \\ c & 0 \end{array}\right] }_{A_{E2}} \underbrace{ \left[\begin{array}{cc} \dot{x}(t) \\ x(t)-r_c \end{array}\right] }_{x_{E2}(t)} + \underbrace{ \left[\begin{array}{cc} b \\ 0 \end{array}\right] }_{B_{E2}} \underbrace{\dot{u}(t)}_{u_{E2}(t)}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d55bc528b4211e44104d9a016f1efe77_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(55)\quad \left[\begin{array}{cc} \dot{x}(t) \\ x(t)-r_c \end{array}\right] = \underbrace{ \left[\begin{array}{cc} a & b \\ c & 0 \end{array}\right] }_{S} \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b36ebc36ec3a8aa2b181e54a374490a4_l3.png "Rendered by QuickLaTeX.com")
![(56)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{cc} a & b \\ c & 0 \end{array}\right] }_{S} \frac{d}{dt} \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right]=\\ \underbrace{ \left[\begin{array}{cc} a & 0 \\ 1 & 0 \end{array}\right] }_{A_{E2}} \underbrace{ \left[\begin{array}{cc} a & b \\ c & 0 \end{array}\right] }_{S} \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] + \underbrace{ \left[\begin{array}{cc} b \\ 0 \end{array}\right] }_{B_{E2}} \underbrace{\dot{u}(t)}_{u_{E2}(t)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3fe9bb9955ebd8e2c8e93bbd706c8fe9_l3.png "Rendered by QuickLaTeX.com")
 をかけると3つめの偏差系E3
をかけると3つめの偏差系E3![\displaystyle{(57)\quad \boxed{\underbrace{ \frac{d}{dt} \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{\dot{x}_{E3}} = \underbrace{ \left[\begin{array}{cc} a & b \\ 0 & 0 \end{array}\right] }_{A_{E3}} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{x_{E3}} + \underbrace{ \left[\begin{array}{cc} 0 \\ 1 \end{array}\right] }_{B_{E3}} \underbrace{\dot{u}(t)}_{u_{E3}(t)}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c85ae085cc84c481ab12fad21f3f8ae0_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(58)\quad \underbrace{\dot{u}(t)}_{u_{E3}(t)} =- \underbrace{ \left[\begin{array}{cc} k & k_I \end{array}\right] }_{K_E} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{x_{E3}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b8ffb28df7a25dd49c60692720881d34_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(59)\quad \underbrace{\frac{d}{dt} \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{\dot{x}_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} a & b \\ -k & -k_I \end{array}\right] }_{A_{EK}} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{x_{E3}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-150f484db41dfcfd7bc2713f40cf1398_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(60)\quad \underbrace{ \left[\begin{array}{cc} q(x(t)-x_\infty) \\ r\dot{u}(t) \end{array}\right] }_{y_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} q & 0 \\ 0 & r\frac{d}{dt} \end{array}\right] }_{C_{E3}} \underbrace{ \left[\begin{array}{cc} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{x_{E3}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-36376901e37df555679c68adbb340194_l3.png "Rendered by QuickLaTeX.com")

 と
と を決めます。(55)を(59)に代入して
を決めます。(55)を(59)に代入して![\displaystyle{(62)\quad \dot{u}(t) =- \underbrace{ \left[\begin{array}{cc} k & k_I \end{array}\right] }_{K_E} \underbrace{ \left[\begin{array}{cc} a & b \\ 1 & 0 \end{array}\right]^{-1} }_{S^{-1}} \left[\begin{array}{cc} \dot{x}(t) \\ x(t)-r_c \end{array}\right] =- \underbrace{ \left[\begin{array}{cc} f & f_I \end{array}\right] }_{F_E=K_ES^{-1}} \left[\begin{array}{cc} \dot{x}(t) \\ x(t)-r_c \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-84e71c3cc59f8a7feeedd162fdda01c6_l3.png "Rendered by QuickLaTeX.com")



![\displaystyle{(64)\quad \frac{d}{dt} %\underbrace{ \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] %}_{{\tilde x}_E(t)-{\tilde x}_{E\infty}} = \underbrace{ \left[\begin{array}{cc} a & b \\ 0 & 0 \end{array}\right] }_{A_{E}} %\underbrace{ \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] %}_{{\tilde x}_E(t)-{\tilde x}_{E\infty}} + \underbrace{ \left[\begin{array}{c} 0 \\ 1 \end{array}\right] }_{B_{E}} {\dot u}(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0c41509ad03419a701e8ac16d5e5fdd9_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(65)\quad {\dot u}(t)=- \left[\begin{array}{cc} k & k_I \end{array}\right] \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e386ce8fe6431632be33d291ba81684c_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(67)\quad \left[\begin{array}{cc} f & f_I \end{array}\right] = \left[\begin{array}{cc} k & k_I \end{array}\right] \left[\begin{array}{cc} a & b \\ c & 0 \end{array}\right]^{-1} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ee8e3f8eae5af6b084a763df95a171f7_l3.png "Rendered by QuickLaTeX.com")

 を求め,
を求め,
![\displaystyle{(70)\quad \begin{array}{l} \dot{x}_K(t)=A_Kx_K(t)+B_K \left[\begin{array}{c} y(t) \\ r_c \end{array}\right]\\ u(t)=C_Kx_K(t) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a49a6c693b0b6603def7809f250eda5e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(71)\quad \begin{array}{l} A_K= \left[\begin{array}{cc} a-hc-bf & -bf_I \\ 0 & 0 \end{array}\right]\\ B_K= \left[\begin{array}{cc} h & 0\\ 1 & -1 \end{array}\right]\\ C_K=- \left[\begin{array}{cc} f & f_I \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-78a0c63e2aa625650bb1f5593550221b_l3.png "Rendered by QuickLaTeX.com")


 を満たすものを選びます。(2)を(1)に代入して、次式を得ます。
を満たすものを選びます。(2)を(1)に代入して、次式を得ます。
 )、状態フィードバックを行って閉ループ系を漸近安定(
)、状態フィードバックを行って閉ループ系を漸近安定( )にできることです。そのようなゲイン
)にできることです。そのようなゲイン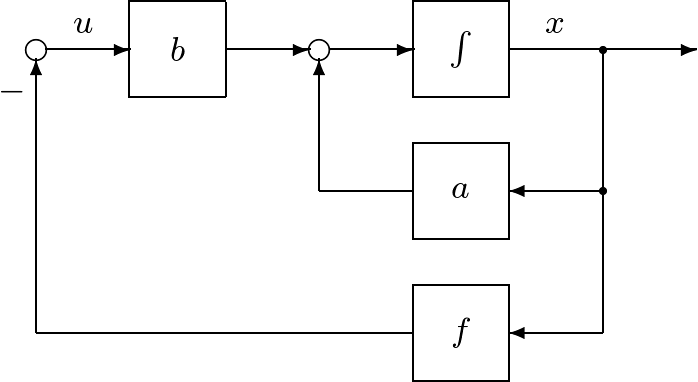 図1 状態フィードバックによる閉ループ系
図1 状態フィードバックによる閉ループ系

![(6)\quad \begin{array}{lll} \displaystyle{J_x=\int_0^\infty q^2x^2(t)\,dt}\\ \displaystyle{=\int_0^\infty q^2e^{2(a-bf)t}x^2(0)\,dt}\\ \displaystyle{=q^2x^2(0)\left[\frac{1}{2(a-bf)}e^{2(a-bf)t}\right]_0^\infty}\\ \displaystyle{=\frac{q^2x^2(0)}{2(a-bf)}\left[\underbrace{e^{2(a-bf)\infty}}_{0}-\underbrace{e^{2(a-bf)0}}_{1}\right]}\\ \displaystyle{=-\frac{q^2}{2(a-bf)}x^2(0)>0\quad (a-bf<0)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ccbd56eae6c871c4d509a66bb0b1d13c_l3.png "Rendered by QuickLaTeX.com")
 はいくらでも小さくできることが分かります。
はいくらでも小さくできることが分かります。 は次式で与えられます。
は次式で与えられます。
![(8)\quad \begin{array}{lll} \displaystyle{J_u=\int_0^\infty r^2u^2(t)\,dt}\\ \displaystyle{=\int_0^\infty r^2f^2e^{2(a-bf)t}x^2(0)\,dt}\\ \displaystyle{=r^2f^2x^2(0)\left[\frac{1}{2(a-bf)}e^{2(a-bf)t}\right]_0^\infty}\\ \displaystyle{=-\frac{r^2f^2}{2(a-bf)}x^2(0)>0\quad (a-bf<0)} \end{array}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9f5dcb6b69a84056f569669f6625e961_l3.png "Rendered by QuickLaTeX.com")
 が下に凸で、
が下に凸で、  において最小値を取ることは、次式から分かります。
において最小値を取ることは、次式から分かります。

 として、
として、 の場合について、
の場合について、 の外形を描くと、次図のようになります。ここで、
の外形を描くと、次図のようになります。ここで、
 の最小化と等価です。
の最小化と等価です。
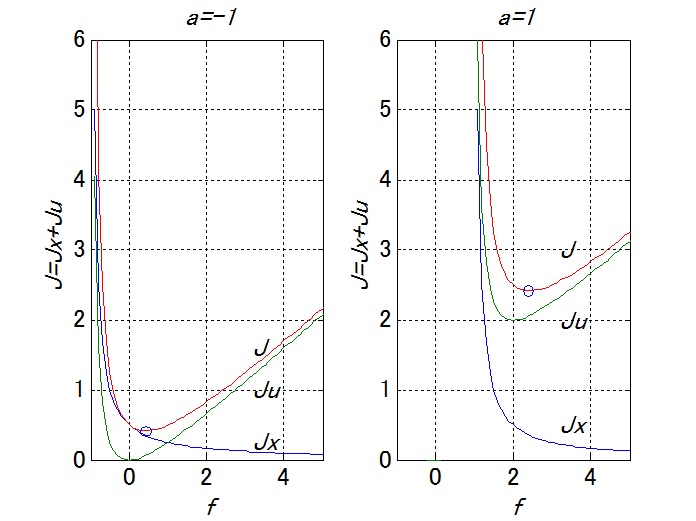 図2 評価関数の概形
図2 評価関数の概形



 は物理量の2乗和になっていますので、予め代表時間と代表長さによる無次元化を行っておく必要があります。たとえば、状態変数と入力変数がとりうる範囲を想定して
は物理量の2乗和になっていますので、予め代表時間と代表長さによる無次元化を行っておく必要があります。たとえば、状態変数と入力変数がとりうる範囲を想定して

 の場合を考えると
の場合を考えると
 で、これが大きいほど時定数
で、これが大きいほど時定数 を導入して重み係数を次のように設定します。
を導入して重み係数を次のように設定します。
 は固定されますので、設計パラメータは
は固定されますので、設計パラメータは 、
、 、
、 として、設計パラメータを
として、設計パラメータを と変えてみると、次の応答を得ます。
と変えてみると、次の応答を得ます。 図3 重み係数の比
図3 重み係数の比 による応答の変化
による応答の変化![\displaystyle{(21)\quad M=\left[\begin{array}{cc} a & -r^{-2}b^2 \\ -q^2 & -a \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-36ba3bbca3aa8b30edda524ce3262be9_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(23)\quad \left[\begin{array}{cc} v_1 \\ v_2 \end{array}\right] =\left[\begin{array}{cc} 1 \\ \frac{-a-\sqrt{a^2+r^{-2}b^2q^2}}{-r^{-2}b^2} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-818b80fae6a9d75606e700bc7229ad17_l3.png "Rendered by QuickLaTeX.com")




 でない限り
でない限り
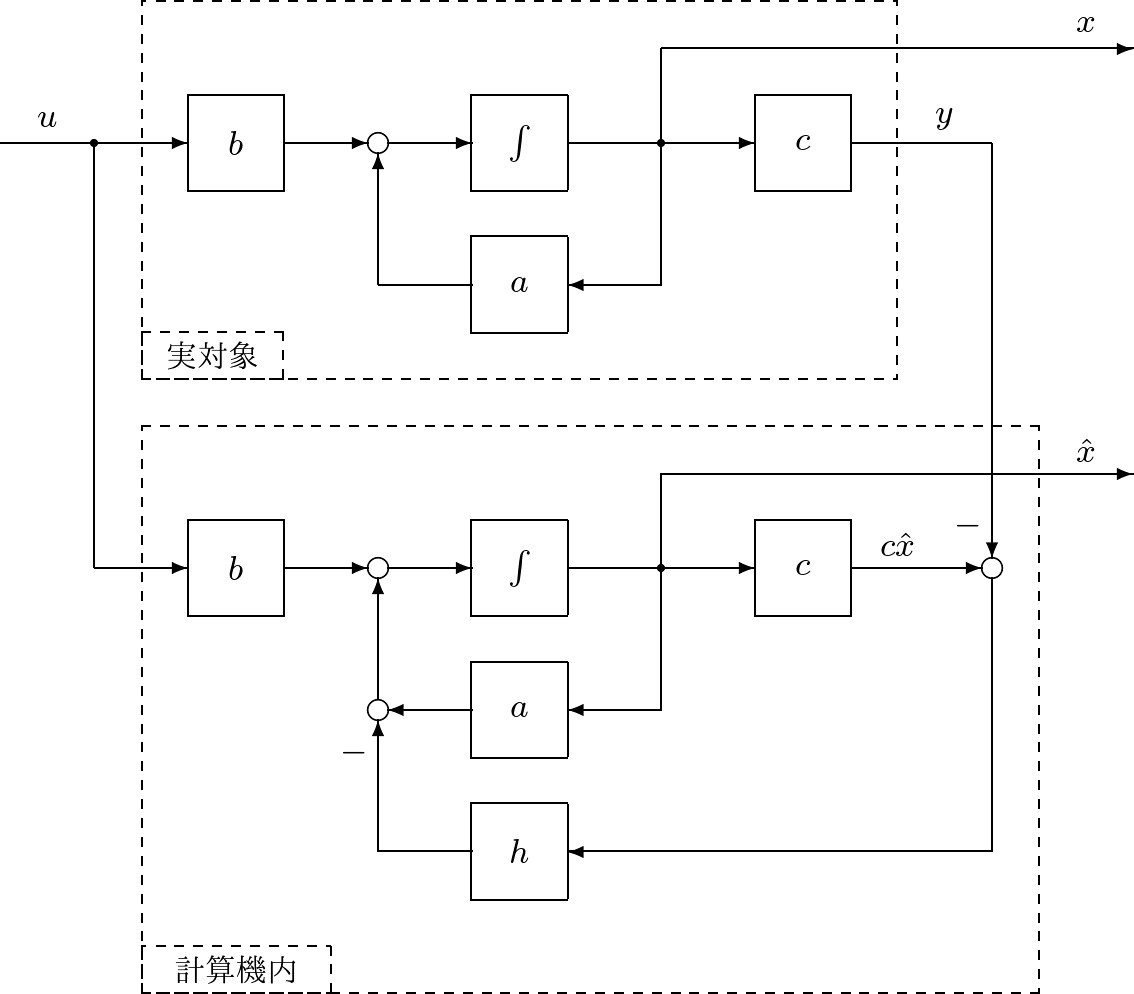 図4 状態オブザーバの考え方
図4 状態オブザーバの考え方


 であるとすると
であるとすると
 は、制御対象の状態
は、制御対象の状態 を漸近的に推定することができます。このとき
を漸近的に推定することができます。このとき


![\displaystyle{(36)\quad \left[\begin{array}{cc} \dot{x}(t)\\ \dot{\hat{x}}(t) \end{array}\right]= \underbrace{ \left[\begin{array}{cc} a& -bf\\ hc& a-hc-bf \end{array}\right] }_{A_F} \left[\begin{array}{cc} x(t)\\ \hat{x}(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bd0bda91887ef926493669aa7866308d_l3.png "Rendered by QuickLaTeX.com")
 とおくと、状態変数を変更した閉ループ系の状態方程式として、次式を得ます。
とおくと、状態変数を変更した閉ループ系の状態方程式として、次式を得ます。![\displaystyle{(37)\quad \boxed{ \left[\begin{array}{cc} \dot{x}(t)\\ \dot{e}(t) \end{array}\right]= \underbrace{ \left[\begin{array}{cc} a-bf & -bf\\ 0 & a-hc \end{array}\right] }_{A_F'} \left[\begin{array}{cc} x(t)\\ e(t) \end{array}\right]} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-36b6d2d539455492f72a79c84bbd9dfe_l3.png "Rendered by QuickLaTeX.com")


 に代入して
に代入して

 と
と は共に負となるように
は共に負となるように
 に対する状態フィードバック
に対する状態フィードバック と,状態オブザーバ
と,状態オブザーバ (
( )を考える。状態オブザーバによって推定された状態を用いる状態フィードバック
)を考える。状態オブザーバによって推定された状態を用いる状態フィードバック による閉ループ系の状態方程式を求めよ。
による閉ループ系の状態方程式を求めよ。 ,
, (
( )となるように,
)となるように, と
と をどう対応させたか,およびその理由を述べよ。
をどう対応させたか,およびその理由を述べよ。
![\displaystyle{(44)\quad \underbrace{ \left[\begin{array}{cc} \dot{x}(t)\\ \dot{e}(t) \end{array}\right] }_{\dot{x}_{CL}(t)} = \underbrace{ \left[\begin{array}{cc} a-bf & -bf\\ 0 & a-hc \end{array}\right] }_{A_{CL}} \underbrace{ \left[\begin{array}{cc} x(t) \\ e(t) \end{array}\right] }_{x_{CL}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-18643919f74aadae99e3d8cd8e1b5bdb_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(45)\quad \underbrace{ \left[\begin{array}{cc} qx(t)\\ ru(t) \end{array}\right] }_{y_{CL}(t)} = \underbrace{ \left[\begin{array}{cc} q & 0 \\ -rf & -rf \end{array}\right] }_{C_{CL}} \underbrace{ \left[\begin{array}{cc} x(t) \\ e(t) \end{array}\right] }_{x_{CL}(t)} \label{eq7.2.5}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-684ce689df1ece17dac2a773360c137d_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(48)\quad x_{CL}(0)= \left[\begin{array}{cc} x(0)\\ e(0) \end{array}\right]= \left[\begin{array}{cc} x(0)\\ \hat{x}(0)-x(0) \end{array}\right] \label{eq7.2.9}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6af8920d912cba1d035a781d6e959640_l3.png "Rendered by QuickLaTeX.com")

 と
と はそれぞれシステムノイズと観測ノイズとよばれ、定常正規確率過程として扱うのが普通です。特に、
はそれぞれシステムノイズと観測ノイズとよばれ、定常正規確率過程として扱うのが普通です。特に、 と
と は分散を表しています。ここでは確率的な議論を避けるため、
は分散を表しています。ここでは確率的な議論を避けるため、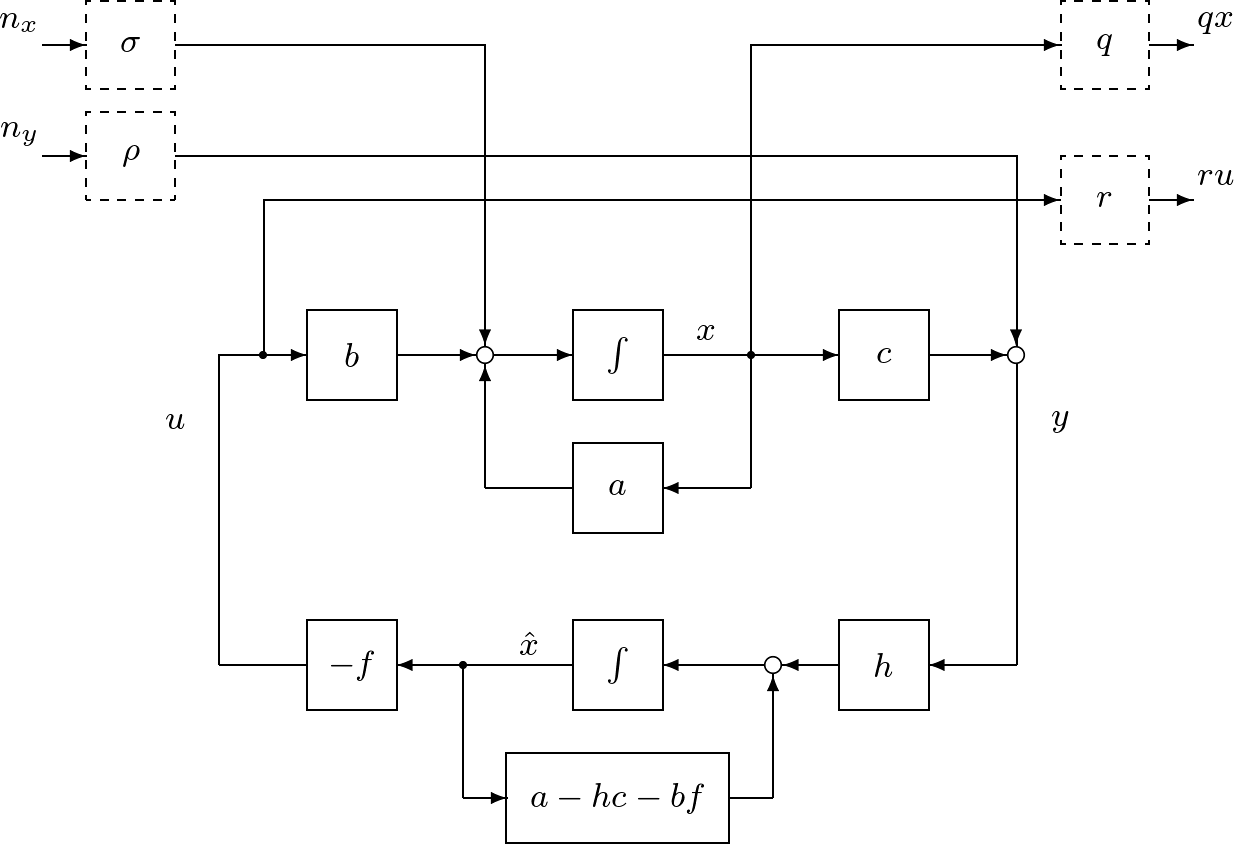
![\displaystyle{(50)\quad &&\left[\begin{array}{cc} \dot{x}(t)\\ \dot{e}(t) \end{array}\right]= \underbrace{ \left[\begin{array}{cc} a-bf & -bf \\ 0 & a-hc \end{array}\right] }_{A_{CL}} \left[\begin{array}{cc} x(t)\\ e(t) \end{array}\right]\nonumber\\ &&+ \underbrace{ \left[\begin{array}{cc} \sigma & 0\\ -\sigma & h\rho \end{array}\right] }_{B_{CL}} \left[\begin{array}{cc} n_x(t)\\ n_y(t) \end{array}\right] \label{eq7.2.11}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3dae61b87dbc3a1048d873c29e860e77_l3.png "Rendered by QuickLaTeX.com")
 に与える場合と
に与える場合と に与える場合の2通り
に与える場合の2通り![\displaystyle{(51)\quad y^{(1)}_{CL}(t) = C_{CL}\exp(A_{CL}t) \underbrace{ \left[\begin{array}{cc} \sigma \\ -\sigma \end{array}\right] }_{x_{CL}(0)=B^{(1)}_{CL}} \label{eq7.2.12}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6d85ddaaacfba1399baf629b17e45713_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(52)\quad y^{(2)}_{CL}(t) = C_{CL}\exp(A_{CL}t) \underbrace{ \left[\begin{array}{cc} 0 \\ h\rho \end{array}\right] }_{x_{CL}(0)=B^{(2)}_{CL}} \label{eq7.2.13}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d2090f3554280d4f6ace06c772a5f0c6_l3.png "Rendered by QuickLaTeX.com")

![\Pi= \left[\begin{array}{cc} \pi_1 & \pi_3 \\ \pi_3 & \pi_2 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b9186e507dec8f157d9372f455bb6a31_l3.png "Rendered by QuickLaTeX.com") とおくと
とおくと
 を直接計算することは容易ではないのですが、
を直接計算することは容易ではないのですが、 が安定行列であることは,
が安定行列であることは,![\displaystyle{(55)\quad \begin{array}{lll} && \underbrace{ \left[\begin{array}{cc} \pi_1 & \pi_3 \\ \pi_3 & \pi_2 \end{array}\right] }_{\Pi} \underbrace{ \left[\begin{array}{cc} a-bf & -bf \\ 0 & a-hc \end{array}\right] }_{A_{CL}}\nonumber\\ &&+ \underbrace{ \left[\begin{array}{cc} a-bf & 0 \\ -bf & a-hc \end{array}\right] }_{A_{CL}^T} \underbrace{ \left[\begin{array}{cc} \pi_1 & \pi_3 \\ \pi_3 & \pi_2 \end{array}\right] }_{\Pi}\nonumber\\ &&+ \underbrace{ \left[\begin{array}{cc} q^2+r^2f^2 & r^2f^2 \\ r^2f^2 & r^2f^2 \end{array}\right] }_{C_{CL}^TC_{CL}>0} = \left[\begin{array}{cc} 0 & 0 \\ 0 & 0 \end{array}\right] \end{array} \label{eq7.2.16}}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-79305e587239433bbc038b894b5d433c_l3.png "Rendered by QuickLaTeX.com")



 を求めれば,評価関数は
を求めれば,評価関数は
 としたものであることに注意します。いま,
としたものであることに注意します。いま, かつ
かつ という場合を考えてみると,(50)の第2行目より
という場合を考えてみると,(50)の第2行目より
 は存在しないので,評価関数(59)は第1項だけとなり,これを最小化する
は存在しないので,評価関数(59)は第1項だけとなり,これを最小化する
 を用いて次のように与えられます。
を用いて次のように与えられます。
 ,
, を得ます。このとき,式(58)は
を得ます。このとき,式(58)は
 が求まります。したがって,評価関数(59)は
が求まります。したがって,評価関数(59)は


 を求め,
を求め,




 、
、 、
、 、
、 、
、 、
、 として、状態フィードバックだけとオブザーバベース コントローラを用いた場合とを比較してみると、次の応答を得ます。
として、状態フィードバックだけとオブザーバベース コントローラを用いた場合とを比較してみると、次の応答を得ます。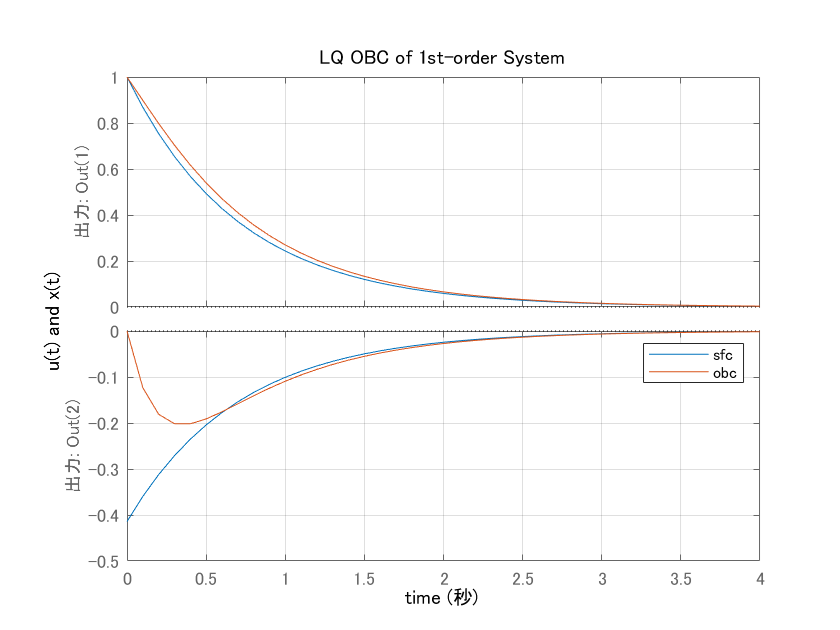 図6 状態フィードバックとオブザーバベース コントローラを用いた場合の応答の変化
図6 状態フィードバックとオブザーバベース コントローラを用いた場合の応答の変化 となっていることを確かめよ。
となっていることを確かめよ。 をラグランジュの未定定数として
をラグランジュの未定定数として




 を第3式に代入して
を第3式に代入して


 は
は