| MATLAB |
%cSPIN_sf_gs.m
%-----
clear all close all
J1=1; J2=1; J3=0.5;
OMnom=2*pi; OMmin=0*OMnom; OMmax=2*OMnom;
A1=[0 (J2-J3)/J1;(J3-J1)/J2 0];
B=diag([1/J1 1/J2]); C=eye(2); D=zeros(2,2);
S0=[zeros(2,2) B;C D];
S1=zeros(4,4); S1(1:2,1:2)=A1;
%-----
J1=1; J2=1; J3=0.5;
OMnom=2*pi; OMmin=0*OMnom; OMmax=2*OMnom;
A1= OMmin*[0 (J2-J3)/J1;(J3-J1)/J2 0];
A2= OMmax*[0 (J2-J3)/J1;(J3-J1)/J2 0];
B=diag([1/J1 1/J2]);
B1=B; B2=B;
C1=[eye(2,2);zeros(2,2)];
D11=zeros(4,2);
D12=[zeros(2,2);eye(2,2)];
alpha=1; r=3; th=pi/4;
LMIs=sf_synlmi7(A1,A2,B1,B2,C1,D11,D12,alpha,r,th);
cobj=zeros(1,decnbr(LMIs));
cobj(1)=1;
[cost,xopt]=mincx(LMIs,cobj);
Y=dec2mat(LMIs,xopt,2);
Z1=dec2mat(LMIs,xopt,3);
Z2=dec2mat(LMIs,xopt,4);
F1=Z1/Y,pl1=eig(A1-B2*F1)
F2=Z2/Y,pl2=eig(A2-B2*F2)
%------
figure(1)
subplot(121),dregion(alpha,0,r,th,7*[-1,1,-1,1])
plot(real(pl1),imag(pl1),'*')
subplot(122), dregion(alpha,0,r,th,7*[-1,1,-1,1])
plot(real(pl2),imag(pl2),'*')
%------
prange=OMmax-OMmin; pmax=OMmax; pmin=OMmin;
sim("SPIN_sf_gs")
%-----
function LMIs=sf_synlmi7(A1,A2,B1,B2,C1,D11,D12,alpha,r,th)
[n,m]=size(B2);
sth=sin(th); cth=cos(th);
setlmis([]);
gam=lmivar(1,[1 0]);
Y=lmivar(1,[n 1]);
Z1=lmivar(2,[m n]);
Z2=lmivar(2,[m n]);
%
lmi11=newlmi;
lmiterm([lmi11,1,1,Y],A1,1,'s'); %#1:A*Y+Y*A'
lmiterm([lmi11,1,1,Z1],-B2,1,'s'); %#1:-(B2*Z+Z*B2')
lmiterm([lmi11,1,2,0],B1); %#1:B1
lmiterm([lmi11,2,2,gam],-1,1); %#1:-gam
lmiterm([lmi11,3,1,Y],C1,1); %#1:C1*Y
lmiterm([lmi11,3,1,Z1],-D12,1); %#1:D12*Z
lmiterm([lmi11,3,2,0],D11); %#1:D11
lmiterm([lmi11,3,3,gam],-1,1); %#1:-gam
lmi21=newlmi;
lmiterm([lmi21,1,1,Y],A1,1,'s'); %#2:A*Y+Y*A'
lmiterm([lmi21,1,1,Z1],-B2,1,'s'); %#2:-(B2*Z+Z'*B2')
lmiterm([lmi21,1,1,Y],2*alpha,1); %#2:2*alpha*Y
lmi31=newlmi;
lmiterm([lmi31,1,1,Y],-r,1); %#3:-r*Y
lmiterm([lmi31,1,2,Y],A1,1); %#3:A*Y
lmiterm([lmi31,1,2,Z1],-B2,1); %#3:-B2*Z
lmiterm([lmi31,2,2,Y],-r,1); %#3:-r*Y
lmi41=newlmi;
lmiterm([lmi41,1,1,Y],sth*A1,1,'s'); %#4:sth*(A*Y+Y*A')
lmiterm([lmi41,1,1,Z1],-sth*B2,1,'s');%#4:-sth*(B2*Z+Z'*B2')
lmiterm([lmi41,1,2,Y],cth*A1,1); %#4:cth*A*Y
lmiterm([lmi41,1,2,Y],1,-cth*A1'); %#4:-cth*Y*A'
lmiterm([lmi41,1,2,Z1],-cth*B2,1); %#4:-cth*B2*Z
lmiterm([lmi41,1,2,-Z1],1,cth*B2'); %#4:cth*Z'*B2'
lmiterm([lmi41,2,2,Y],sth*A1,1,'s'); %#4:sth*(A*Y+Y*A')
lmiterm([lmi41,2,2,Z1],-sth*B2,1,'s');%#4:-sth*(B2*Z+Z'*B2')
%
lmi12=newlmi;
lmiterm([lmi12,1,1,Y],A2,1,'s'); %#1:A*Y+Y*A'
lmiterm([lmi12,1,1,Z2],-B2,1,'s'); %#1:-(B2*Z+Z*B2')
lmiterm([lmi12,1,2,0],B1); %#1:B1
lmiterm([lmi12,2,2,gam],-1,1); %#1:-gam
lmiterm([lmi12,3,1,Y],C1,1); %#1:C1*Y
lmiterm([lmi12,3,1,Z2],-D12,1); %#1:D12*Z
lmiterm([lmi12,3,2,0],D11); %#1:D11
lmiterm([lmi12,3,3,gam],-1,1); %#1:-gam
lmi22=newlmi;
lmiterm([lmi22,1,1,Y],A2,1,'s'); %#2:A*Y+Y*A'
lmiterm([lmi22,1,1,Z2],-B2,1,'s'); %#2:-(B2*Z+Z'*B2')
lmiterm([lmi22,1,1,Y],2*alpha,1); %#2:2*alpha*Y
lmi32=newlmi;
lmiterm([lmi32,1,1,Y],-r,1); %#3:-r*Y
lmiterm([lmi32,1,2,Y],A2,1); %#3:A*Y
lmiterm([lmi32,1,2,Z2],-B2,1); %#3:-B2*Z
lmiterm([lmi32,2,2,Y],-r,1); %#3:-r*Y
lmi42=newlmi;
lmiterm([lmi42,1,1,Y],sth*A2,1,'s'); %#4:sth*(A*Y+Y*A')
lmiterm([lmi42,1,1,Z2],-sth*B2,1,'s');%#4:-sth*(B2*Z+Z'*B2')
lmiterm([lmi42,1,2,Y],cth*A2,1); %#4:cth*A*Y
lmiterm([lmi42,1,2,Y],1,-cth*A2'); %#4:-cth*Y*A'
lmiterm([lmi42,1,2,Z2],-cth*B2,1); %#4:-cth*B2*Z
lmiterm([lmi42,1,2,-Z2],1,cth*B2'); %#4:cth*Z'*B2'
lmiterm([lmi42,2,2,Y],sth*A2,1,'s'); %#4:sth*(A*Y+Y*A')
lmiterm([lmi42,2,2,Z2],-sth*B2,1,'s');%#4:-sth*(B2*Z+Z'*B2')
%
lmi5=newlmi;
lmiterm([-lmi5,1,1,Y],1,1); %#5:Y
lmi6=newlmi;
lmiterm([lmi6,1,1,gam],1,1); %#6:gam
lmiterm([-lmi6,1,1,0],1e3); %#6:1000
LMIs=getlmis;
end
%-----
%eof
|
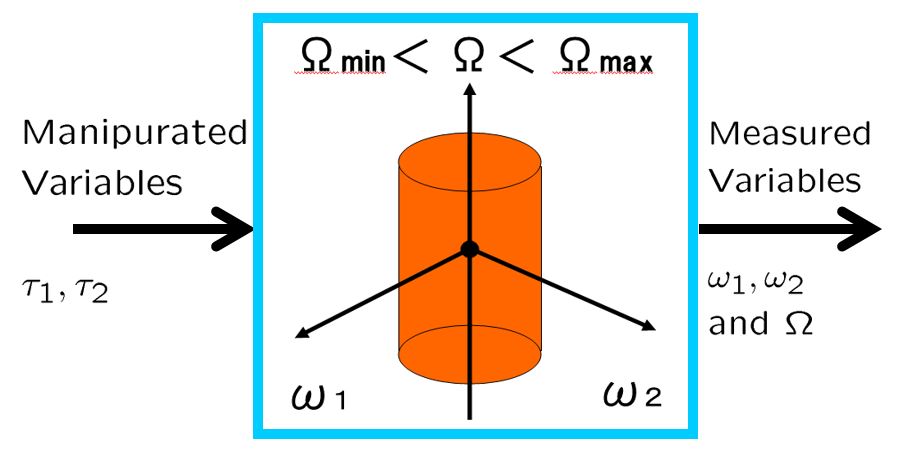


![\displaystyle{(3) \underbrace{ \left[\begin{array}{c} \dot{\omega}_1(t) \\ \dot{\omega}_2(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{cc} 0 & \Omega(t)\frac{J_2-J_3}{J_1} \\ -\Omega(t)\frac{J_3-J_1}{J_2} & 0 \end{array}\right] }_{A(\Omega(t))} \underbrace{ \left[\begin{array}{c} \omega_1(t) \\ \omega_2(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{cc} \frac{1}{J_1} & 0 \\ 0 & \frac{1}{J_2} \end{array}\right] }_{B} \underbrace{ \left[\begin{array}{c} \tau_1(t) \\ \tau_2(t) \end{array}\right] }_{u(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-359a3b72faaf2d0a5cfc50d11ff3e826_l3.png "Rendered by QuickLaTeX.com")
 は次式で表されることに着目します。
は次式で表されることに着目します。


 によって重み付けて
によって重み付けて

 によって重み付けた
によって重み付けた


 次系を考えます。
次系を考えます。![\displaystyle{(12)\quad P: \left\{\begin{array}{l} \dot{x}(t)=\underbrace{(p_1(\Omega(t))A_1+p_2(\Omega(t))A_2)}_{A(\Omega(t))}x(t)+B_1u_1(t)+B_2u_2(t) \\ \underbrace{ \left[\begin{array}{c} y(t)\\ u(t) \end{array}\right] }_{y_1(t)} = \underbrace{ \left[\begin{array}{c} C\\ 0 \end{array}\right] }_{C_1} x(t)+ \underbrace{ \left[\begin{array}{c} 0\\ 0 \end{array}\right] }_{D_{11}}u_1(t)+ \underbrace{ \left[\begin{array}{c} 0\\ I \end{array}\right] }_{D_{12}} u_2(t) \\ y_2(t)=x(t) \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5c52c28d5dc8099876feb3fc35d22c0a_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(14)\quad P_{CL}: \left\{\begin{array}{l} \dot{x}(t)=\underbrace{(p_1(\Omega(t))(A_1-B_2F_1)+p_2(\Omega(t))(A_2-B_2F_2))}_{A_F(\Omega(t))}x(t)+B_1u_1(t) \\ y_1(t)= \underbrace{ \left[\begin{array}{c} C\\ -F \end{array}\right] }_{C_1-D_{12}F} x(t) \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-838ab14f36c266566a693aec4791304a_l3.png "Rendered by QuickLaTeX.com")
 ゲインが
ゲインが より小、すなわち
より小、すなわち
 を求める問題を考えます。
を求める問題を考えます。 制御(状態フィードバック)を共通のリャプノフ関数をもつように解きます。その際コントローラの実装上の立場から、各端点において
制御(状態フィードバック)を共通のリャプノフ関数をもつように解きます。その際コントローラの実装上の立場から、各端点において
 subject to
subject to

![\displaystyle{(17)\quad \left[\begin{array}{ccc} (A_1Y-B_2Z_1)^T+A_1Y-B_2Z_1 & B_1 & (C_1Y-D_{12}Z_1)^T \\ B_1^T & -\gamma I & D_{11}^T \\ C_1Y-D_{12}Z_1 & D_{11} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-50ae1d70b8404dd73e277a0933b482ce_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(18)\quad \begin{array}{l} 2\alpha Y+A_1Y-B_2Z_1+(A_1Y-B_2Z_1)^T<0 \\ \left[\begin{array}{cc} -rY & A_1Y-B_2Z_1 \\ (A_1Y-B_2Z_1)^T & -rY \end{array}\right]<0 \\ \left[\begin{array}{cc} \sin\theta(A_1Y-B_2Z_1+(A_1Y-B_2Z_1)^T) & \\ -\cos\theta(A_1Y-B_2Z_1-(A_1Y-B_2Z_1)^T) & \end{array}\right. \\ \left.\begin{array}{cc} & \cos\theta(A_1Y-B_2Z_1-(A_1Y-B_2Z_1)^T) \\ & \sin\theta(A_1Y-B_2Z_1+(A_1Y-B_2Z_1)^T) \end{array}\right]<0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2e9b5aa7f67110719da98182197e19d2_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(19)\quad \left[\begin{array}{ccc} (A_2Y-B_2Z_2)^T+A_2Y-B_2Z_2 & B_1 & (C_1Y-D_{12}Z_2)^T \\ B_1^T & -\gamma I & D_{11}^T \\ C_1Y-D_{12}Z_2 & D_{11} & -\gamma I \end{array}\right]<0 \\ }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-12d276ca145e5b9ab2496cceb04509bb_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(20)\quad \begin{array}{l} 2\alpha Y+A_1Y-B_2Z_2+(A_1Y-B_2Z_2)^T<0 \\ \left[\begin{array}{cc} -rY & A_1Y-B_2Z_2 \\ (A_1Y-B_2Z_2)^T & -rY \end{array}\right]<0 \\ \left[\begin{array}{cc} \sin\theta(A_2Y-B_2Z_2+(A_2Y-B_2Z_2)^T) & \\ -\cos\theta(A_2Y-B_2Z_2-(A_2Y-B_2Z_2)^T) & \end{array}\right. \\ \left.\begin{array}{cc} & \cos\theta(A_2Y-B_2Z_2-(A_2Y-B_2Z_2)^T) \\ & \sin\theta(A_2Y-B_2Z_2+(A_2Y-B_2Z_2)^T) \end{array}\right]<0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-078a99a65651029b51c2abe33836d299_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(23)\quad \left[\begin{array}{ccc} Y(A_1-B_2F)^T+(A_1-B_2F)Y & B_1 & Y(C_1-D_{12}F)^T \\ B_1^T & -\gamma I & D_{11}^T \\ (C_1-D_{12}F)Y & D_{11} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2495a37e41fa5d2eb8395dc1e0a92613_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(24)\quad \left[\begin{array}{ccc} Y(A_2-B_2F)^T+(A_2-B_2F)Y & B_1 & Y(C_1-D_{12}F)^T \\ B_1^T & -\gamma I & D_{11}^T \\ (C_1-D_{12}F)Y & D_{11} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-726386f3bcbb36ee571761f73067b759_l3.png "Rendered by QuickLaTeX.com")
 を求めています。
を求めています。 ととれば
ととれば![\displaystyle{(25)\quad \left[\begin{array}{ccc} (A_1-BF_1)^TX+X(A_1-BF_1) & XB_1 & (C_1-D_{12}F)^T \\ B_1^TX_1 & -\gamma I & D_{11}^T \\ (C_1-D_{12}F) & D_{11} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bc5a1c5a1e9161235175c0b7f524f2ea_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(26)\quad \left[\begin{array}{ccc} (A_2-BF_2)^TX+X(A_2-BF_2) & XB_1 & (C_1-D_{12}F)^T \\ B_1^TX & -\gamma I & D_{11}^T \\ (C_1-D_{12}F) & D_{11} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-fab9d12f17bd6d0fb7f7d46e76739e7c_l3.png "Rendered by QuickLaTeX.com")
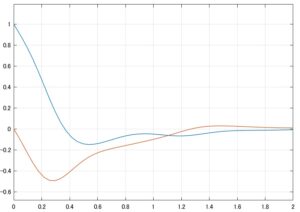
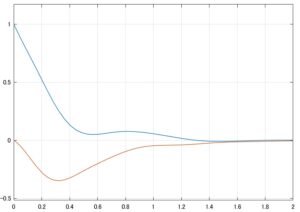
 回転体のパラメータ変動を状態FBによるLPV制御で抑制したシミュレーションプログラムを以下に示す。これを実行し効果を確かめよ。
回転体のパラメータ変動を状態FBによるLPV制御で抑制したシミュレーションプログラムを以下に示す。これを実行し効果を確かめよ。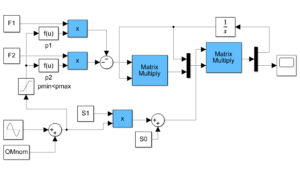

 回転体のパラメータ変動を状態FBによる
回転体のパラメータ変動を状態FBによる 制御で抑制したシミュレーションプログラムを以下に示す。これを実行し
制御で抑制したシミュレーションプログラムを以下に示す。これを実行し


 の近傍
の近傍 において、リャプノフ関数とよばれる
において、リャプノフ関数とよばれる


 と
と を個別に安定行列としたとすると
を個別に安定行列としたとすると




 を見つけることができれば
を見つけることができれば


![\displaystyle{(13)\quad \exists X_1>0:\ \left[\begin{array}{ccc} (A_1-BF_1)^TX_1+X_1(A_1-BF_1) & X_1B & C^T \\ B^TX_1 & -\gamma I & D^T \\ C & D & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-28301303802019e78fb62ed6637650b2_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(14)\quad \exists X_2>0:\ \left[\begin{array}{ccc} (A_2-BF_2)^TX_2+X_2(A_2-BF_2) & X_2B & C^T \\ B^TX_2 & -\gamma I & D^T \\ C & D & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-677c72fc4448a2f17c5849d63dc4b8ad_l3.png "Rendered by QuickLaTeX.com")
 が求まっているとしますと
が求まっているとしますと![\displaystyle{(15)\quad \left[\begin{array}{ccc} (A_1-BF_1)^TX+X(A_1-BF_1) & XB & C^T \\ B^TX & -\gamma^2 I & D^T \\ C & D &-I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3e1b3029dd25fed1df0542788e32f52b_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \Leftrightarrow \left[\begin{array}{cc} (A_1-BF_1)^TX+X(A_1-BF_1) & XB \\ B^TX & 0 \end{array}\right] < \left[\begin{array}{cc} C^T & 0 \\ D^T & I \end{array}\right] \left[\begin{array}{cc} -I & 0 \\ 0 & \gamma^2 I \end{array}\right] \left[\begin{array}{cc} C & D \\ 0 & I \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-95b352095767fa5785703461ab47da1e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(16)\quad \left[\begin{array}{ccc} (A_1-BF_1)^TX+X(A_1-BF_1) & XB & C^T \\ B^TX & -\gamma^2 I & D^T \\ C & D &-I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3a9dce011974e9852d76a5c15a462870_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \Leftrightarrow \left[\begin{array}{cc} (A_2-BF_2)^TX+X(A_2-BF_2) & XB \\ B^TX & 0 \end{array}\right] < \left[\begin{array}{cc} C^T & 0 \\ D^T & I \end{array}\right] \left[\begin{array}{cc} -I & 0 \\ 0 & \gamma^2 I \end{array}\right] \left[\begin{array}{cc} C & D \\ 0 & I \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e8092184aa8bae2155a4ea6be9f9759a_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{ \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right]^T \left[\begin{array}{cc} \begin{array}{c} ( p_1(\Omega(t))(A_1-BF_1)+p_2(\Omega(t))(A_2-BF_2) )^TX\\ +X( p_1(\Omega(t))(A_1-BF_1)+p_2(\Omega(t))(A_2-BF_2) ) \end{array} & XB \\ B^TX & 0 \end{array}\right] \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1fc23d0a361803d365380b86a013ae6e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ =p_1(\Omega(t)) \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right]^T \left[\begin{array}{cc} (A_1-BF_1)^TX+X(A_1-BF_1) & XB \\ B^TX & 0 \end{array}\right] \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-58fe1f448fed4138630f4ccd35499d8a_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ +p_2(\Omega(t)) \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right]^T \left[\begin{array}{cc} (A_2-BF_2)^TX+X(A_2-BF_2) & XB \\ B^TX & 0 \end{array}\right] \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8816e97e8b96078669863e3736020960_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ < \underbrace{(p_1(\Omega(t))+p_2(\Omega(t)))}_1 \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right]^T \left[\begin{array}{cc} C & D \\ 0 & I \end{array}\right]^T \left[\begin{array}{cc} - I & 0 \\ 0 & \gamma^2 I \end{array}\right] \left[\begin{array}{cc} C & D \\ 0 & I \end{array}\right] \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2d9183af6071904863cbae048501209a_l3.png "Rendered by QuickLaTeX.com")


