| MATLAB |
%cSPIN_sf_gs.m
%-----
clear all close all
J1=1; J2=1; J3=0.5;
OMnom=2*pi; OMmin=0*OMnom; OMmax=2*OMnom;
A1=[0 (J2-J3)/J1;(J3-J1)/J2 0];
B=diag([1/J1 1/J2]); C=eye(2); D=zeros(2,2);
S0=[zeros(2,2) B;C D];
S1=zeros(4,4); S1(1:2,1:2)=A1;
%-----
J1=1; J2=1; J3=0.5;
OMnom=2*pi; OMmin=0*OMnom; OMmax=2*OMnom;
A1= OMmin*[0 (J2-J3)/J1;(J3-J1)/J2 0];
A2= OMmax*[0 (J2-J3)/J1;(J3-J1)/J2 0];
B=diag([1/J1 1/J2]);
B1=B; B2=B;
C1=[eye(2,2);zeros(2,2)];
D11=zeros(4,2);
D12=[zeros(2,2);eye(2,2)];
alpha=1; r=3; th=pi/4;
LMIs=sf_synlmi7(A1,A2,B1,B2,C1,D11,D12,alpha,r,th);
cobj=zeros(1,decnbr(LMIs));
cobj(1)=1;
[cost,xopt]=mincx(LMIs,cobj);
Y=dec2mat(LMIs,xopt,2);
Z1=dec2mat(LMIs,xopt,3);
Z2=dec2mat(LMIs,xopt,4);
F1=Z1/Y,pl1=eig(A1-B2*F1)
F2=Z2/Y,pl2=eig(A2-B2*F2)
%------
figure(1)
subplot(121),dregion(alpha,0,r,th,7*[-1,1,-1,1])
plot(real(pl1),imag(pl1),'*')
subplot(122), dregion(alpha,0,r,th,7*[-1,1,-1,1])
plot(real(pl2),imag(pl2),'*')
%------
prange=OMmax-OMmin; pmax=OMmax; pmin=OMmin;
sim("SPIN_sf_gs")
%-----
function LMIs=sf_synlmi7(A1,A2,B1,B2,C1,D11,D12,alpha,r,th)
[n,m]=size(B2);
sth=sin(th); cth=cos(th);
setlmis([]);
gam=lmivar(1,[1 0]);
Y=lmivar(1,[n 1]);
Z1=lmivar(2,[m n]);
Z2=lmivar(2,[m n]);
%
lmi11=newlmi;
lmiterm([lmi11,1,1,Y],A1,1,'s'); %#1:A*Y+Y*A'
lmiterm([lmi11,1,1,Z1],-B2,1,'s'); %#1:-(B2*Z+Z*B2')
lmiterm([lmi11,1,2,0],B1); %#1:B1
lmiterm([lmi11,2,2,gam],-1,1); %#1:-gam
lmiterm([lmi11,3,1,Y],C1,1); %#1:C1*Y
lmiterm([lmi11,3,1,Z1],-D12,1); %#1:D12*Z
lmiterm([lmi11,3,2,0],D11); %#1:D11
lmiterm([lmi11,3,3,gam],-1,1); %#1:-gam
lmi21=newlmi;
lmiterm([lmi21,1,1,Y],A1,1,'s'); %#2:A*Y+Y*A'
lmiterm([lmi21,1,1,Z1],-B2,1,'s'); %#2:-(B2*Z+Z'*B2')
lmiterm([lmi21,1,1,Y],2*alpha,1); %#2:2*alpha*Y
lmi31=newlmi;
lmiterm([lmi31,1,1,Y],-r,1); %#3:-r*Y
lmiterm([lmi31,1,2,Y],A1,1); %#3:A*Y
lmiterm([lmi31,1,2,Z1],-B2,1); %#3:-B2*Z
lmiterm([lmi31,2,2,Y],-r,1); %#3:-r*Y
lmi41=newlmi;
lmiterm([lmi41,1,1,Y],sth*A1,1,'s'); %#4:sth*(A*Y+Y*A')
lmiterm([lmi41,1,1,Z1],-sth*B2,1,'s');%#4:-sth*(B2*Z+Z'*B2')
lmiterm([lmi41,1,2,Y],cth*A1,1); %#4:cth*A*Y
lmiterm([lmi41,1,2,Y],1,-cth*A1'); %#4:-cth*Y*A'
lmiterm([lmi41,1,2,Z1],-cth*B2,1); %#4:-cth*B2*Z
lmiterm([lmi41,1,2,-Z1],1,cth*B2'); %#4:cth*Z'*B2'
lmiterm([lmi41,2,2,Y],sth*A1,1,'s'); %#4:sth*(A*Y+Y*A')
lmiterm([lmi41,2,2,Z1],-sth*B2,1,'s');%#4:-sth*(B2*Z+Z'*B2')
%
lmi12=newlmi;
lmiterm([lmi12,1,1,Y],A2,1,'s'); %#1:A*Y+Y*A'
lmiterm([lmi12,1,1,Z2],-B2,1,'s'); %#1:-(B2*Z+Z*B2')
lmiterm([lmi12,1,2,0],B1); %#1:B1
lmiterm([lmi12,2,2,gam],-1,1); %#1:-gam
lmiterm([lmi12,3,1,Y],C1,1); %#1:C1*Y
lmiterm([lmi12,3,1,Z2],-D12,1); %#1:D12*Z
lmiterm([lmi12,3,2,0],D11); %#1:D11
lmiterm([lmi12,3,3,gam],-1,1); %#1:-gam
lmi22=newlmi;
lmiterm([lmi22,1,1,Y],A2,1,'s'); %#2:A*Y+Y*A'
lmiterm([lmi22,1,1,Z2],-B2,1,'s'); %#2:-(B2*Z+Z'*B2')
lmiterm([lmi22,1,1,Y],2*alpha,1); %#2:2*alpha*Y
lmi32=newlmi;
lmiterm([lmi32,1,1,Y],-r,1); %#3:-r*Y
lmiterm([lmi32,1,2,Y],A2,1); %#3:A*Y
lmiterm([lmi32,1,2,Z2],-B2,1); %#3:-B2*Z
lmiterm([lmi32,2,2,Y],-r,1); %#3:-r*Y
lmi42=newlmi;
lmiterm([lmi42,1,1,Y],sth*A2,1,'s'); %#4:sth*(A*Y+Y*A')
lmiterm([lmi42,1,1,Z2],-sth*B2,1,'s');%#4:-sth*(B2*Z+Z'*B2')
lmiterm([lmi42,1,2,Y],cth*A2,1); %#4:cth*A*Y
lmiterm([lmi42,1,2,Y],1,-cth*A2'); %#4:-cth*Y*A'
lmiterm([lmi42,1,2,Z2],-cth*B2,1); %#4:-cth*B2*Z
lmiterm([lmi42,1,2,-Z2],1,cth*B2'); %#4:cth*Z'*B2'
lmiterm([lmi42,2,2,Y],sth*A2,1,'s'); %#4:sth*(A*Y+Y*A')
lmiterm([lmi42,2,2,Z2],-sth*B2,1,'s');%#4:-sth*(B2*Z+Z'*B2')
%
lmi5=newlmi;
lmiterm([-lmi5,1,1,Y],1,1); %#5:Y
lmi6=newlmi;
lmiterm([lmi6,1,1,gam],1,1); %#6:gam
lmiterm([-lmi6,1,1,0],1e3); %#6:1000
LMIs=getlmis;
end
%-----
%eof
|
 が漸近安定であるための必要十分条件は、行列
が漸近安定であるための必要十分条件は、行列 の固有値がすべて複素左平面
の固有値がすべて複素左平面 に存在することでした。でも平衡状態
に存在することでした。でも平衡状態 に復帰するその過程はいつも好ましいとは言えません。たとえば、平衡状態
に復帰するその過程はいつも好ましいとは言えません。たとえば、平衡状態
![\[\lambda(A)\subset{\cal D}\subset{\rm\bf LHP}\]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a19919666234e166eff0f7a3abd65698_l3.png "Rendered by QuickLaTeX.com")
 (Linear Matrix Inequality)で表します。
(Linear Matrix Inequality)で表します。![\displaystyle{(1)\quad \begin{array}{lll} && \left[\begin{array}{cc} P & M \\ M^T & Q \end{array}\right]<0\\ &\Leftrightarrow& P-MQ^{-1}M^T<0,\ Q<0\\ &\Leftrightarrow& P<0,\ Q-M^TP^{-1}M<0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1032be1b5ca3689d43f86d220f3f031c_l3.png "Rendered by QuickLaTeX.com")
 または
または はシュール補元(Shure Complement)と呼ばれています。
はシュール補元(Shure Complement)と呼ばれています。![\displaystyle{(2)\quad \begin{array}{lll} & & \underbrace{ \left[\begin{array}{cc} P & M \\ M^T & Q \end{array}\right] }_{R} \\ &=& \left[\begin{array}{cc} I & MQ^{-1} \\ 0 & I \end{array}\right] \left[\begin{array}{cc} P-MQ^{-1}M^T & 0 \\ 0 & Q \end{array}\right] \left[\begin{array}{cc} I & 0 \\ Q^{-1}M^T & I \end{array}\right] \\ &=& \underbrace{ \left[\begin{array}{cc} I & 0 \\ M^TP^{-1} & I \end{array}\right] }_{T^T} \underbrace{ \left[\begin{array}{cc} P & 0 \\ 0 & Q-M^TP^{-1}M \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{cc} I & P^{-1}M \\ 0 & I \end{array}\right] }_{T} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c71f6a58283e2c1b2186c86022be5b68_l3.png "Rendered by QuickLaTeX.com")


 を考えます。
を考えます。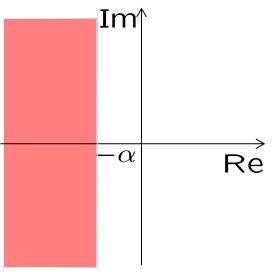


 とすると、次のように確かめられます(*は複素共役)。
とすると、次のように確かめられます(*は複素共役)。
 とおくと、次が成り立ちます。
とおくと、次が成り立ちます。
 α制約を調べる次のコードを説明せよ。
α制約を調べる次のコードを説明せよ。![\displaystyle{(1)\quad \left[\begin{array}{cc} M_{11} & M_{12} \\ M_{21} & M_{22} \end{array}\right] = \left[\begin{array}{cc} I & M_{12}M_{22}^{-1} \\ 0 & I \end{array}\right] \left[\begin{array}{cc} M_{11}-M_{12}M_{22}^{-1}M_{21} & 0 \\ 0 & M_{22} \end{array}\right] \left[\begin{array}{cc} I & 0 \\ M_{22}^{-1}M_{21} & I \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9ea5cb82284f1cc6c47e4d68fea1fa42_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(2)\quad \left[\begin{array}{cc} M_{11} & M_{12} \\ M_{21} & M_{22} \end{array}\right]^{-1} = \left[\begin{array}{cc} \Phi^{-1} & -\Phi^{-1}M_{12}M_{22}^{-1} \\ -M_{22}^{-1}M_{21}\Phi^{-1} & M_{22}^{-1}+M_{22}^{-1}M_{21}\Phi^{-1}M_{12}M_{22}^{-1} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-689510f7239f2480185a3a362051840c_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(4)\quad \left[\begin{array}{cc} M_{11} & M_{12} \\ M_{21} & M_{22} \end{array}\right] = \left[\begin{array}{cc} I & 0 \\ M_{21}M_{11}^{-1} & I \end{array}\right] \left[\begin{array}{cc} M_{11} & 0 \\ 0 & M_{22}-M_{21}M_{11}^{-1}M_{12} \end{array}\right] \left[\begin{array}{cc} I & M_{11}^{-1}M_{12} \\ 0 & I \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b302f0ab53ad24afb5435b50b50c2ac9_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(5)\quad \left[\begin{array}{cc} M_{11} & M_{12} \\ M_{21} & M_{22} \end{array}\right]^{-1} = \left[\begin{array}{cc} M_{11}^{-1}+M_{11}^{-1}M_{12}\Psi^{-1}M_{21}M_{11}^{-1} & -M_{11}^{-1}M_{12}\Psi^{-1} \\ -\Psi^{-1}M_{21}M_{11}^{-1} & \Psi^{-1} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8b9176cb77f72eccf7eda252f067e7e5_l3.png "Rendered by QuickLaTeX.com")







 を求める問題として定式化されています。制約条件を満たす
を求める問題として定式化されています。制約条件を満たす のうち最大の
のうち最大の 切片を与える端点として求められます。
切片を与える端点として求められます。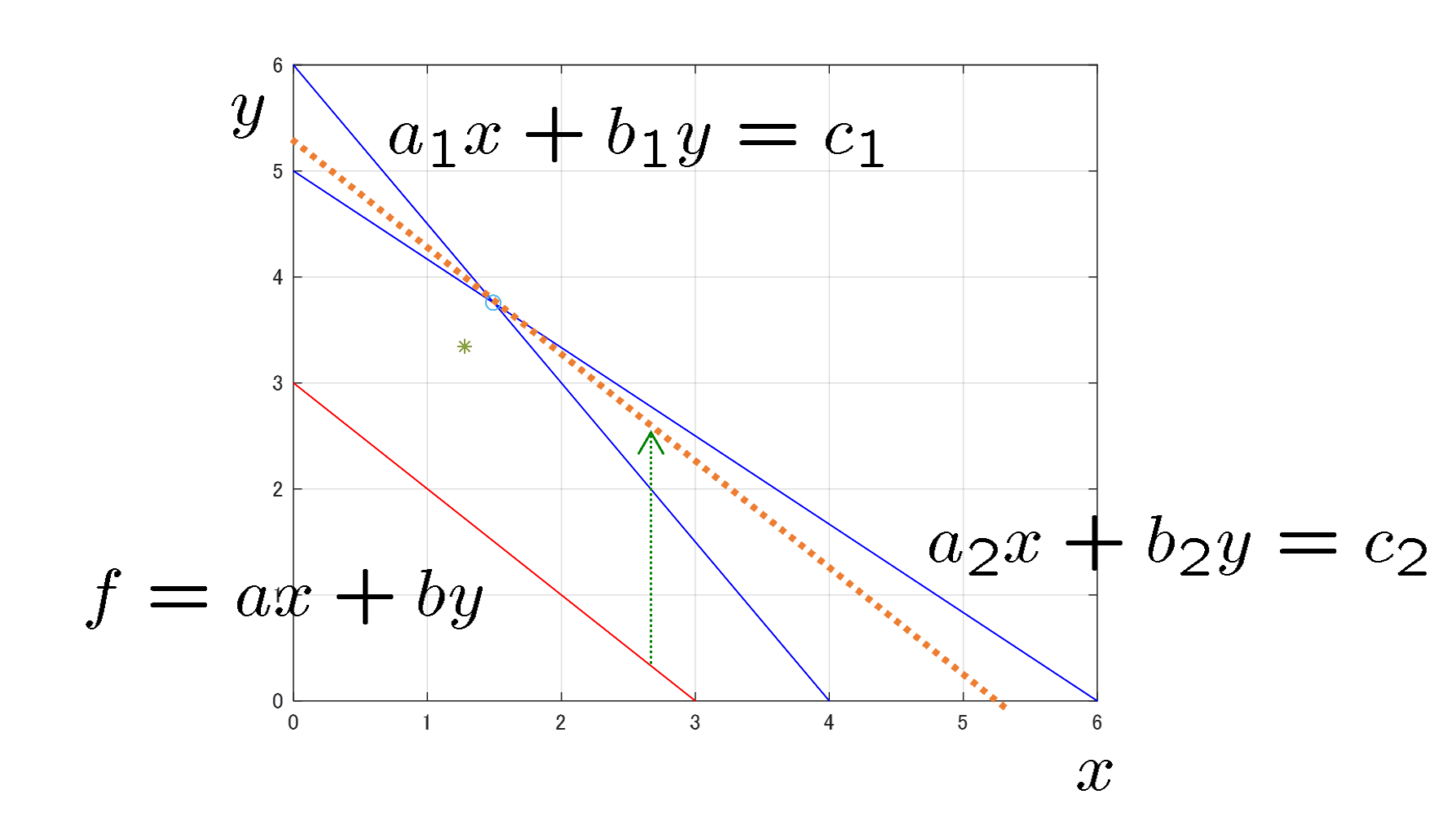 図1 線形計画問題の例
図1 線形計画問題の例
 の値が得られているので、一つの実行可能解が示されています。
の値が得られているので、一つの実行可能解が示されています。

![\displaystyle{(3) \underbrace{ \left[\begin{array}{c} \dot{\omega}_1(t) \\ \dot{\omega}_2(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{cc} 0 & \Omega(t)\frac{J_2-J_3}{J_1} \\ \Omega(t)\frac{J_3-J_1}{J_2} & 0 \end{array}\right] }_{A(\Omega(t))} \underbrace{ \left[\begin{array}{c} \omega_1(t) \\ \omega_2(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{cc} \frac{1}{J_1} & 0 \\ 0 & \frac{1}{J_2} \end{array}\right] }_{B} \underbrace{ \left[\begin{array}{c} \tau_1(t) \\ \tau_2(t) \end{array}\right] }_{u(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-06d0d0706f122470d4466143aac157d2_l3.png "Rendered by QuickLaTeX.com")
 は次式で表されることに着目します。
は次式で表されることに着目します。


 によって重み付けて
によって重み付けて

 によって重み付けた
によって重み付けた
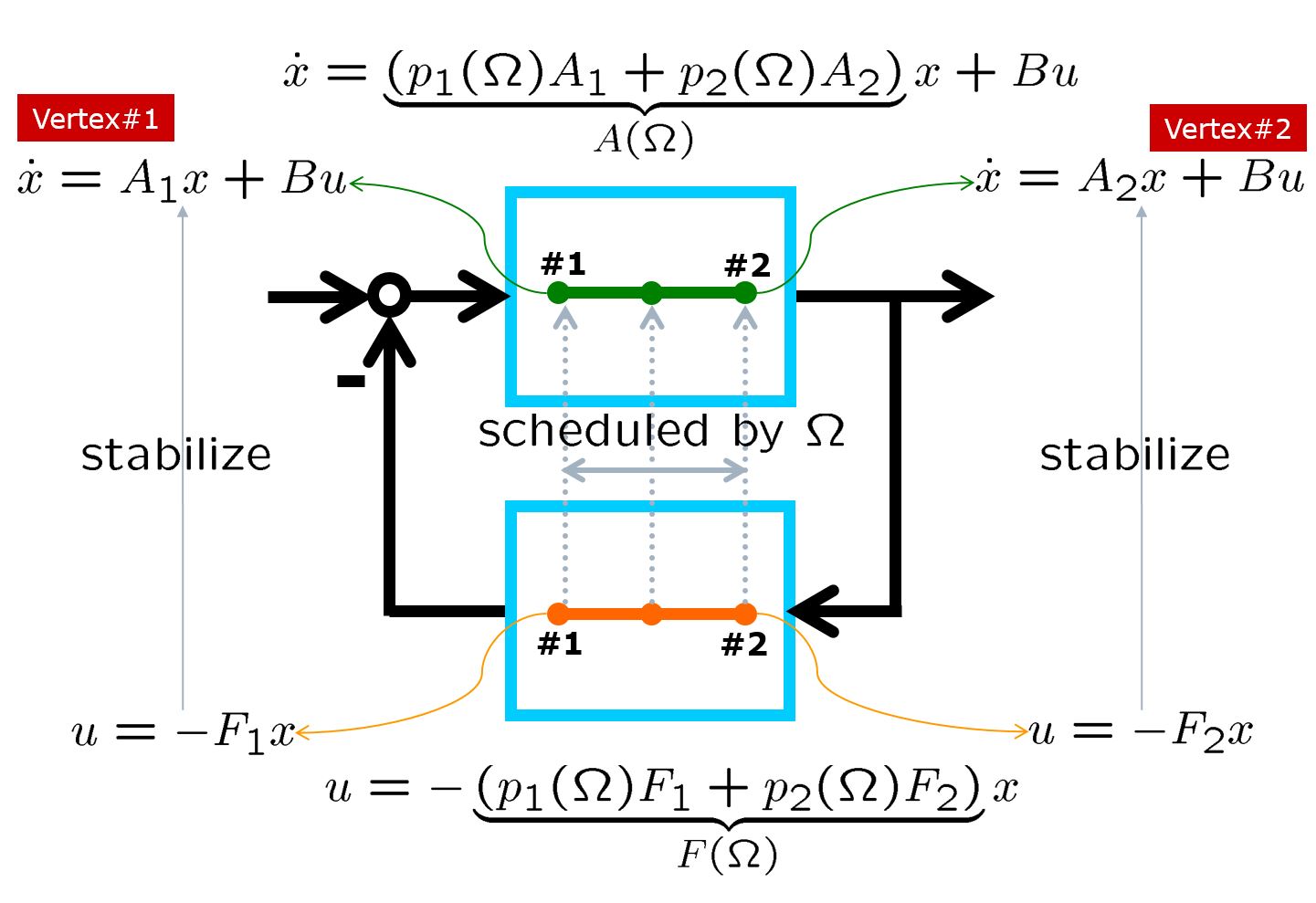 図3 LPV制御の枠組み
図3 LPV制御の枠組み
 と
と は安定行列となるように設計しますが、閉ループ系の時変系としての安定性が保証されるかの検討が必要になります。
は安定行列となるように設計しますが、閉ループ系の時変系としての安定性が保証されるかの検討が必要になります。
 において、リャプノフ関数とよばれる
において、リャプノフ関数とよばれる


 のLMI条件は
のLMI条件は








 を見つけることができれば
を見つけることができれば


 ノルムは
ノルムは より小であるとすると
より小であるとすると![\displaystyle{(28)\quad \exists X_1>0:\ \left[\begin{array}{ccc} (A_1-BF_1)^TX_1+X_1(A_1-BF_1) & X_1B & C^T \\ B^TX_1 & -\gamma I & D^T \\ C & D & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4e0b94de7fd261c64c1ad459ff663479_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(29)\quad \exists X_2>0:\ \left[\begin{array}{ccc} (A_2-BF_2)^TX_2+X_2(A_2-BF_2) & X_2B & C^T \\ B^TX_2 & -\gamma I & D^T \\ C & D & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e6b89cd6a762615e4cf1bf7d4196430f_l3.png "Rendered by QuickLaTeX.com")
 が求まっているとしますと
が求まっているとしますと![\displaystyle{(30)\quad \left[\begin{array}{ccc} (A_1-BF_1)^TX+X(A_1-BF_1) & XB & C^T \\ B^TX & -\gamma^2 I & D^T \\ C & D &-I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-54dee83aaf14f44301eff55fc1606abe_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \Leftrightarrow \left[\begin{array}{cc} (A_1-BF_1)^TX+X(A_1-BF_1) & XB \\ B^TX & 0 \end{array}\right] < \left[\begin{array}{cc} C^T & 0 \\ D^T & I \end{array}\right] \left[\begin{array}{cc} -I & 0 \\ 0 & \gamma^2 I \end{array}\right] \left[\begin{array}{cc} C & D \\ 0 & I \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-95b352095767fa5785703461ab47da1e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(31)\quad \left[\begin{array}{ccc} (A_1-BF_1)^TX+X(A_1-BF_1) & XB & C^T \\ B^TX & -\gamma^2 I & D^T \\ C & D &-I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-740c33f1cb04f1a96dba09b1d8f767da_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \Leftrightarrow \left[\begin{array}{cc} (A_2-BF_2)^TX+X(A_2-BF_2) & XB \\ B^TX & 0 \end{array}\right] < \left[\begin{array}{cc} C^T & 0 \\ D^T & I \end{array}\right] \left[\begin{array}{cc} -I & 0 \\ 0 & \gamma^2 I \end{array}\right] \left[\begin{array}{cc} C & D \\ 0 & I \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e8092184aa8bae2155a4ea6be9f9759a_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{ \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right]^T \left[\begin{array}{cc} \begin{array}{c} ( p_1(\Omega(t))(A_1-BF_1)+p_2(\Omega(t))(A_2-BF_2) )^TX\\ +X( p_1(\Omega(t))(A_1-BF_1)+p_2(\Omega(t))(A_2-BF_2) ) \end{array} & XB \\ B^TX & 0 \end{array}\right] \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1fc23d0a361803d365380b86a013ae6e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ =p_1(\Omega(t)) \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right]^T \left[\begin{array}{cc} (A_1-BF_1)^TX+X(A_1-BF_1) & XB \\ B^TX & 0 \end{array}\right] \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-58fe1f448fed4138630f4ccd35499d8a_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ +p_2(\Omega(t)) \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right]^T \left[\begin{array}{cc} (A_2-BF_2)^TX+X(A_2-BF_2) & XB \\ B^TX & 0 \end{array}\right] \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8816e97e8b96078669863e3736020960_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ < \underbrace{(p_1(\Omega(t))+p_2(\Omega(t)))}_1 \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right]^T \left[\begin{array}{cc} C & D \\ 0 & I \end{array}\right]^T \left[\begin{array}{cc} - I & 0 \\ 0 & \gamma^2 I \end{array}\right] \left[\begin{array}{cc} C & D \\ 0 & I \end{array}\right] \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2d9183af6071904863cbae048501209a_l3.png "Rendered by QuickLaTeX.com")



 ゲインとよびます。
ゲインとよびます。 次系を考えます。
次系を考えます。![\displaystyle{(35)\quad P: \left\{\begin{array}{l} \dot{x}(t)=\underbrace{(p_1(\Omega(t))A_1+p_2(\Omega(t))A_2)}_{A(\Omega(t))}x(t)+B_1u_1(t)+B_2u_2(t) \\ \underbrace{ \left[\begin{array}{c} y(t)\\ u(t) \end{array}\right] }_{y_1(t)} = \underbrace{ \left[\begin{array}{c} C\\ 0 \end{array}\right] }_{C_1} x(t)+ \underbrace{ \left[\begin{array}{c} 0\\ 0 \end{array}\right] }_{D_{11}}u_1(t)+ \underbrace{ \left[\begin{array}{c} 0\\ I \end{array}\right] }_{D_{12}} u_2(t) \\ y_2(t)=x(t) \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-427d73db7b01554c5df63c0e87878e0a_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(37)\quad P_{CL}: \left\{\begin{array}{l} \dot{x}(t)=(A(\Omega(t))-B_2F(\Omega(t)))x(t)+B_1u_1(t) \\ y_1(t)= \underbrace{ \left[\begin{array}{c} C\\ -F \end{array}\right] }_{C_1-D_{12}F} x(t) \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d78f3f099b3133c3acad786e1bf139f9_l3.png "Rendered by QuickLaTeX.com")

 を求める問題を考えます。
を求める問題を考えます。 subject to
subject to

![\displaystyle{(40)\quad \left[\begin{array}{ccc} (A_1Y-B_2Z_1)^T+A_1Y-B_2Z_1 & B_1 & (C_1Y-D_{12}Z_1)^T \\ B_1^T & -\gamma I & D_{11}^T \\ C_1Y-D_{12}Z_1 & D_{11} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c7466d89622c237467830e9e7a4dde4f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(41)\quad \begin{array}{l} 2\alpha Y+A_1Y-B_2Z_1+(A_1Y-B_2Z_1)^T<0 \\ \left[\begin{array}{cc} -rY & A_1Y-B_2Z_1 \\ (A_1Y-B_2Z_1)^T & -rY \end{array}\right]<0 \\ \left[\begin{array}{cc} \sin\theta(A_1Y-B_2Z_1+(A_1Y-B_2Z_1)^T) & \\ -\cos\theta(A_1Y-B_2Z_1-(A_1Y-B_2Z_1)^T) & \end{array}\right. \\ \left.\begin{array}{cc} & \cos\theta(A_1Y-B_2Z_1-(A_1Y-B_2Z_1)^T) \\ & \sin\theta(A_1Y-B_2Z_1+(A_1Y-B_2Z_1)^T) \end{array}\right]<0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e8f398812655a3aa43af25d448acd033_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(42)\quad \left[\begin{array}{ccc} (A_2Y-B_2Z_2)^T+A_2Y-B_2Z_2 & B_1 & (C_1Y-D_{12}Z_2)^T \\ B_1^T & -\gamma I & D_{11}^T \\ C_1Y-D_{12}Z_2 & D_{11} & -\gamma I \end{array}\right]<0 \\ }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4cce98efcffcefcc62a9d413a65d4bc4_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(43)\quad \begin{array}{l} 2\alpha Y+A_1Y-B_2Z_2+(A_1Y-B_2Z_2)^T<0 \\ \left[\begin{array}{cc} -rY & A_1Y-B_2Z_2 \\ (A_1Y-B_2Z_2)^T & -rY \end{array}\right]<0 \\ \left[\begin{array}{cc} \sin\theta(A_2Y-B_2Z_2+(A_2Y-B_2Z_2)^T) & \\ -\cos\theta(A_2Y-B_2Z_2-(A_2Y-B_2Z_2)^T) & \end{array}\right. \\ \left.\begin{array}{cc} & \cos\theta(A_2Y-B_2Z_2-(A_2Y-B_2Z_2)^T) \\ & \sin\theta(A_2Y-B_2Z_2+(A_2Y-B_2Z_2)^T) \end{array}\right]<0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-748f7d965c9e2ec369f760ff7e4cfe8d_l3.png "Rendered by QuickLaTeX.com")


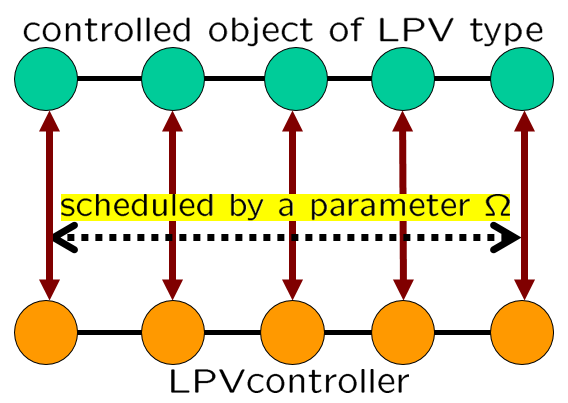 図4 LPV制御のイメージ
図4 LPV制御のイメージ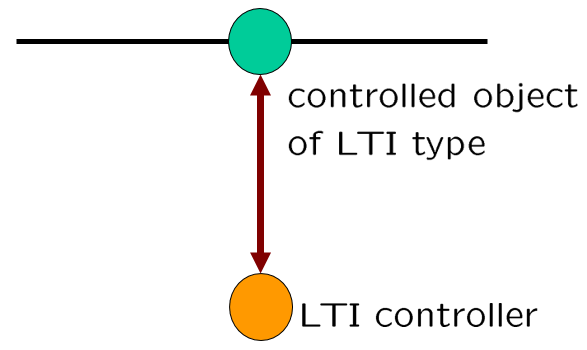 図5 LTI制御のイメージ
図5 LTI制御のイメージ 図6 LPV制御においてスケジューリングを止めた場合
図6 LPV制御においてスケジューリングを止めた場合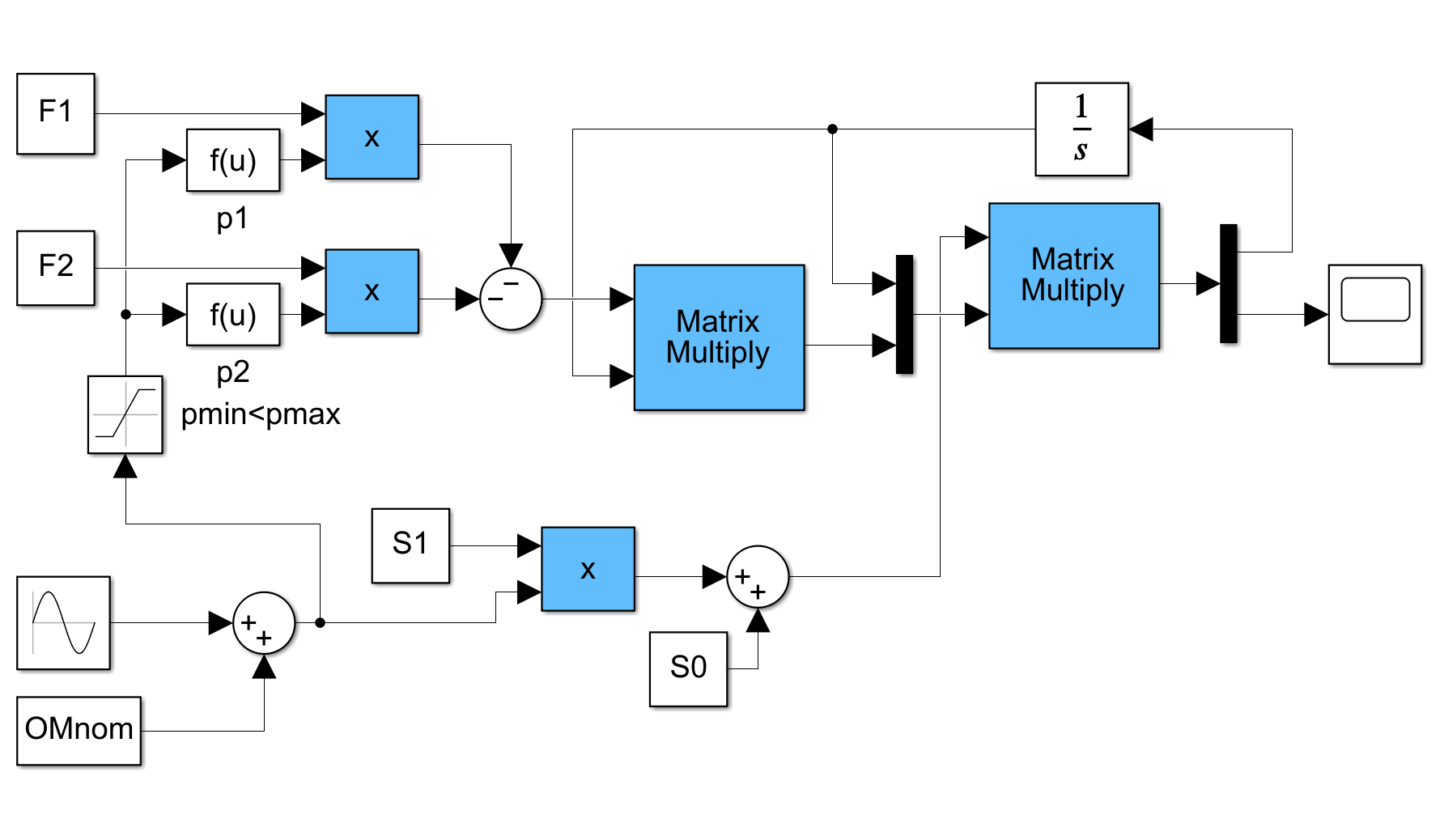
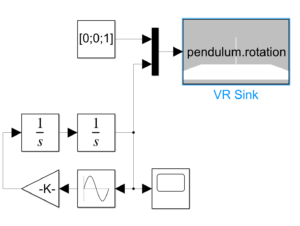
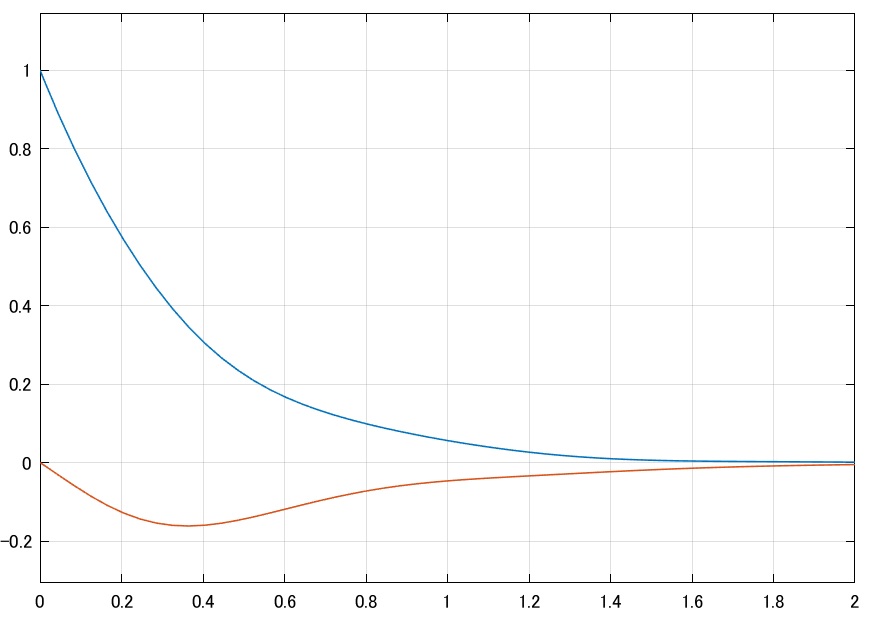 図7 回転体のLPV制御
図7 回転体のLPV制御 回転体のパラメータ変動を状態FBによる
回転体のパラメータ変動を状態FBによる 制御で抑制したシミュレーションプログラムを以下に示す。これを実行し
制御で抑制したシミュレーションプログラムを以下に示す。これを実行し
 図8 回転体の
図8 回転体の


 を含む領域
を含む領域  を考える。いま
を考える。いま  に対して
に対して





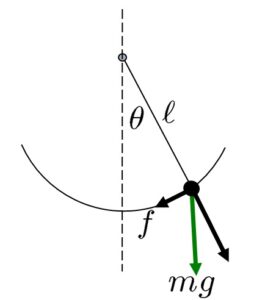
![\displaystyle{(8)\quad x^*= \left[\begin{array}{c} \theta^* \\ \omega^* \end{array}\right]= \left[\begin{array}{c} 0 \\ 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-705b7b5bff8603462c6476137fbbb667_l3.png "Rendered by QuickLaTeX.com")
 をリャプノフ関数の候補としてみます。まず、(6)と(7)から、
をリャプノフ関数の候補としてみます。まず、(6)と(7)から、
![\displaystyle{(10)\quad V(t)=\frac{1}{2} \left[\begin{array}{c} \theta(t) \\ \omega(t) \end{array}\right]^T \left[\begin{array}{cc} \frac{1}{2}\frac{c^2}{J} & \frac{1}{2}c \\ \frac{1}{2}c & J \end{array}\right] \left[\begin{array}{c} \theta(t) \\ \omega(t) \end{array}\right] +mg\ell(1-\cos\theta(t))>0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1a37de844d6bc7c9fe5f7414479bcb1c_l3.png "Rendered by QuickLaTeX.com")







 を次のように決めることができます。
を次のように決めることができます。
 は任意です(ある条件下では
は任意です(ある条件下では としてもよい)。実際
としてもよい)。実際![\displaystyle{(23)\quad \begin{array}{l} \displaystyle{A^T\int_0^\infty \exp(A^Tt)Q\exp(At)dt+\int_0^\infty \exp(A^Tt)Q\exp(At)dt\,A}\\ \displaystyle{=\int_0^\infty \frac{d}{dt}(\exp(A^Tt)Q\exp(At))\,dt}\\ \displaystyle{=\left[\exp(A^Tt)Q\exp(At)\right]_0^\infty=-Q<0} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8818d2570a2394fee7a40d1e57a29ee2_l3.png "Rendered by QuickLaTeX.com")
 に対して
に対して
 とすると、
とすると、 が得られ、これは
が得られ、これは を意味し矛盾です。したがって
を意味し矛盾です。したがって でなけれならず、
でなけれならず、 を得ます。以上から、線形行列不等式(20)が(17)の漸近安定性の必要十分条件になっています。
を得ます。以上から、線形行列不等式(20)が(17)の漸近安定性の必要十分条件になっています。 、
、 とおくと、漸近安定性の等価な条件として次が得られます。
とおくと、漸近安定性の等価な条件として次が得られます。

 は、次のプログラムで計算できることを確かめよ。
は、次のプログラムで計算できることを確かめよ。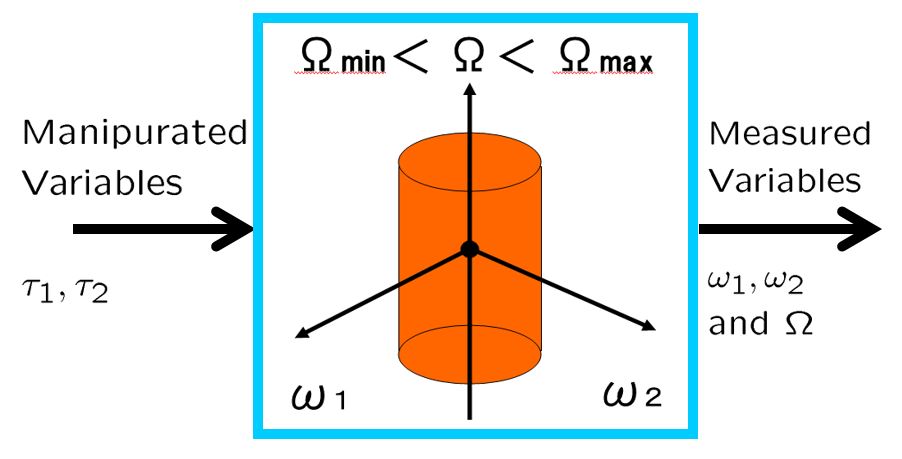 図1 パラメータ変動システムの例
図1 パラメータ変動システムの例 として
として
 図2 パラメータ変動システムの応答シミュレーション例
図2 パラメータ変動システムの応答シミュレーション例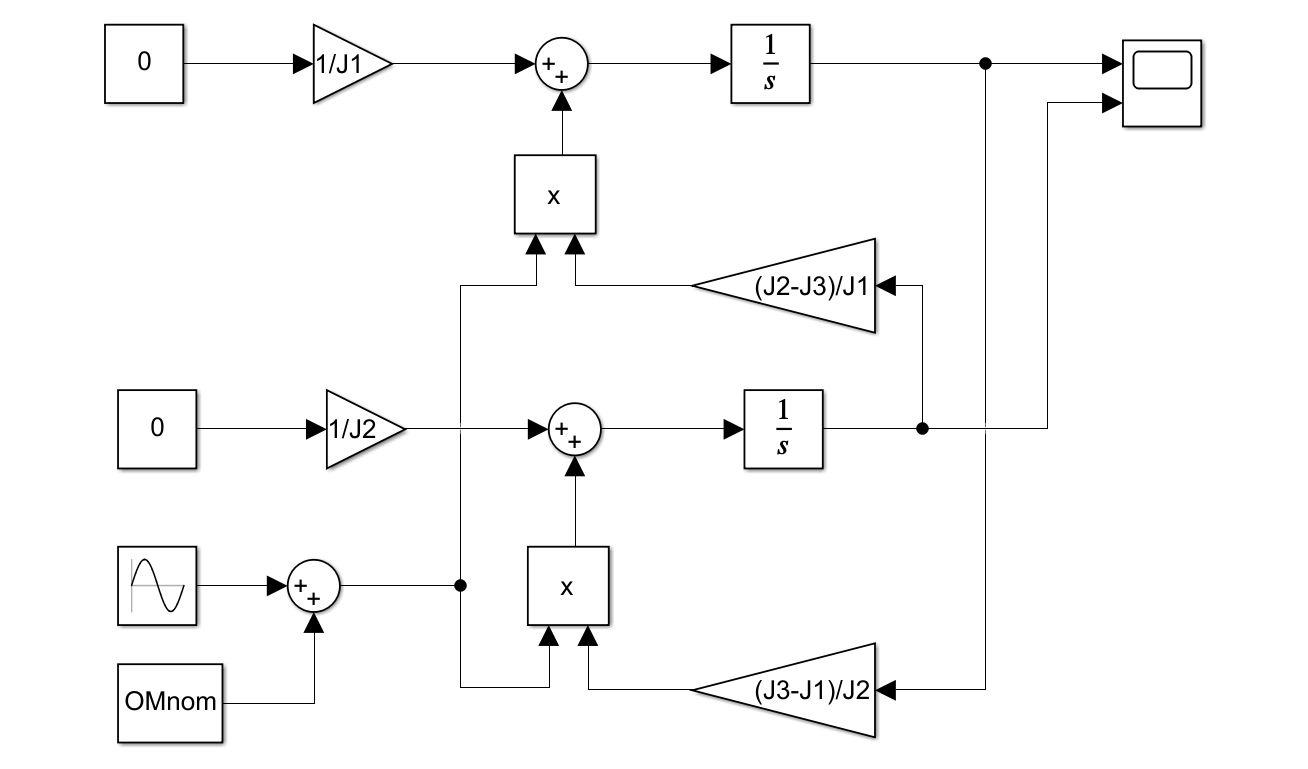 図3 SPIN0.slx
図3 SPIN0.slx

![\displaystyle{(2) \left[\begin{array}{c} \dot{x}(t) \\ y(t) \end{array}\right] = ((1+\sin\omega t)\left[\begin{array}{cc} -1 & 0\\ 0 & 0 \end{array}\right] + \left[\begin{array}{cc} 0 & 1\\ 1 & 0 \end{array}\right]) \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f001119a460ddfb63fb8ce45f3ce5cc1_l3.png "Rendered by QuickLaTeX.com")




 の行列(
の行列( )とします。このとき、サイズ
)とします。このとき、サイズ の直交行列
の直交行列 とサイズ
とサイズ の直交行列
の直交行列
 は次を満たします。
は次を満たします。![\displaystyle{(2.1)\quad \Sigma= \left[\begin{array}{cc} \Sigma_1(k\times k) & 0\,(k\times n-k)\\ 0\,(m-k\times k) & 0\,(m-k\times n-k) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4a7791581dce4cd24f98a969960252c1_l3.png "Rendered by QuickLaTeX.com")

 だから、仮定
だから、仮定 は
は 個の正固有値と
個の正固有値と 個の零固有値をもち、互いに直交する固有ベクトルをもちます。そこで、
個の零固有値をもち、互いに直交する固有ベクトルをもちます。そこで、 のように表し、対応する固有ベクトル
のように表し、対応する固有ベクトル を
を を満足するようにとることができます。いま、
を満足するようにとることができます。いま、 を上のように、また
を上のように、また![\displaystyle{(3)\quad V= [\begin{array}{cc} V_1 & V_2 \end{array}] = [\begin{array}{ccc|ccc} v_1 & \cdots & v_k & v_{k+1}& \cdots & v_n \end{array}] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9e2c3f5bcab76b0f40e66d8ed52a4bfc_l3.png "Rendered by QuickLaTeX.com")

 をかけて
をかけて
 とおくと、第1式から
とおくと、第1式から を得ます。そこで、
を得ます。そこで、 を
を![U= [\begin{array}{cc} U_1 & U_2 \end{array}]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c1b4627fc8a863f942172ecb6452b934_l3.png "Rendered by QuickLaTeX.com") が直交行列となるように選ぶと
が直交行列となるように選ぶと![\displaystyle{(6)\quad U^TAV= \left[\begin{array}{cc} U_1^TAV_1 & U_1^TAV_2\\ U_2^TAV_1 & U_2^TAV_2 \end{array}\right] = \left[\begin{array}{cc} \Sigma_1 & 0\\ U_2^TU_1\Sigma_1 & 0 \end{array}\right] =\Sigma }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ad3dbb9682a84399cf81ac9f7a14583c_l3.png "Rendered by QuickLaTeX.com")
![A= \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 1 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-28ee72cdd1c4922a28b0ca92e721971e_l3.png "Rendered by QuickLaTeX.com") の特異値分解は
の特異値分解は![\displaystyle{(7)\quad A= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right] }_{U} \underbrace{ \left[\begin{array}{ccc} \sqrt{2} & 0 & 0 \\ 0 & 1 & 0 \end{array}\right] }_{\Sigma} \underbrace{ \left[\begin{array}{ccc} 0 & 1 & 0 \\ \frac{1}{\sqrt{2}} & 0 & -\frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}} & 0 & \frac{1}{\sqrt{2}} \end{array}\right]^T }_{V^T} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2af72a50a4707c3528e66ecddb5d79d3_l3.png "Rendered by QuickLaTeX.com")
 ですが、
ですが、 のサイズは
のサイズは であるので、
であるので、![\left[\begin{array}{cc} 1 & 0 \\ 0 & 2 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-52817e1f1230257731e70e86ebf61fd2_l3.png "Rendered by QuickLaTeX.com") となります(サイズ
となります(サイズ で、その正の平方根
で、その正の平方根 が特異値で、上の
が特異値で、上の![\displaystyle{(8)\quad \underbrace{ \left[\begin{array}{cc} 1 & 0 \\ 0 & 2 \end{array}\right] }_{AA^T} \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right] }_{U} = \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right] }_{U} \underbrace{ \left[\begin{array}{cc} 2 & 0 \\ 0 & 1 \end{array}\right] }_{\Sigma_1^2} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6f51f7ede73c92e99db76c7c0af734a4_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(9)\quad \underbrace{ \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 1 \\ 0 & 1 & 1 \end{array}\right] }_{A^TA} \underbrace{ \left[\begin{array}{ccc} 0 & 1 & 0 \\ x & 0 & -y \\ y & 0 & x \end{array}\right] }_{V} = \underbrace{ \left[\begin{array}{ccc} 0 & 1 & 0 \\ x & 0 & -y \\ y & 0 & x \end{array}\right] }_{V} \underbrace{ \left[\begin{array}{ccc} 2 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 0 \end{array}\right] }_{{\rm diag}\{\Sigma_1^2,0\}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-80803b0ba51318c2e2c0a244cacf7e45_l3.png "Rendered by QuickLaTeX.com")
![\left[\begin{array}{ccc}x \\y \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8bdd4adafc737a6aa063609be73a7f4a_l3.png "Rendered by QuickLaTeX.com") と
と![\left[\begin{array}{ccc}-y \\x \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-fe09ee953836c1856bf4c87b1a5da003_l3.png "Rendered by QuickLaTeX.com") が直交しており、
が直交しており、 の制約があります。上式から
の制約があります。上式から が出て、
が出て、 と定まります。
と定まります。 から
から への写像
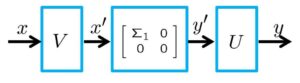
への写像 の「伝達特性」をどう測るかを考えます。これはスカラの場合は正比例の関係
の「伝達特性」をどう測るかを考えます。これはスカラの場合は正比例の関係 ですから、比例定数
ですから、比例定数 に相当する量を求める話になります。
に相当する量を求める話になります。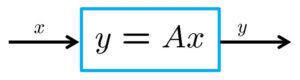
![\displaystyle{(1)\quad \begin{array}{l} A= \underbrace{ \left[\begin{array}{cc} U_1 & U_2 \end{array}\right] }_{U(m\times m)} \underbrace{ \left[\begin{array}{cc} {\rm diag}\{\sigma_1,\cdots,\sigma_k\} & 0_{k\times (n-k)} \\ 0_{(m-k)\times k} & 0_{(m-k)\times (n-k)} \end{array}\right] }_{\Sigma= \left[\begin{array}{cc} \Sigma_1 & 0 \\ 0 & 0 \end{array}\right] \quad(\sigma_1\ge\cdots\ge\sigma_k) } \underbrace{ \left[\begin{array}{cc} V_1^T \\ V_2^T \end{array}\right] }_{V(n\times n)^T}\\ =U_1(m\times k)\Sigma_1(k\times k)V_1(n\times k)^T \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-dc89eab35a6815c659415bf9a11570b9_l3.png "Rendered by QuickLaTeX.com")
 で、
で、






 (行列
(行列



 に関する2次方程式
に関する2次方程式








 )とします。
)とします。 の場合(未知数の数が方程式の数より大きい場合)、(1)はunder-determined(劣決定)と呼ばれ、
の場合(未知数の数が方程式の数より大きい場合)、(1)はunder-determined(劣決定)と呼ばれ、![\displaystyle{(2)\quad \begin{array}{l} \underbrace{U\left[\begin{array}{cc} \Sigma_1 & 0_{n\times m-n} \end{array}\right] \left[\begin{array}{c} V_1^H\\ V_2^H \end{array}\right]}_{A}x =U\Sigma_1V_1^Hx=b\\ \Sigma_1={\rm diag}\{\sigma_1,\cdots,\sigma_n\} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2633ba4a0b1a6e8db6ae07669f36a2f2_l3.png "Rendered by QuickLaTeX.com")

 より第1項と第2項は直交することから
より第1項と第2項は直交することから
 として得られる
として得られる は、
は、 を最小化する最小ノルム解と呼ばれます。
を最小化する最小ノルム解と呼ばれます。 の場合(未知数の数が方程式の数より小さい場合)、(1)はover-determined(過決定)と呼ばれ、
の場合(未知数の数が方程式の数より小さい場合)、(1)はover-determined(過決定)と呼ばれ、![\displaystyle{(5)\quad \begin{array}{l} \underbrace{\left[\begin{array}{cc} U_1 & U_2 \end{array}\right] \left[\begin{array}{cc} \Sigma_1 \\ 0_{n-m\times m} \end{array}\right]V^H}_{A}x =U_1\Sigma_1V^Hx=b\\ \Sigma_1={\rm diag}\{\sigma_1,\cdots,\sigma_m\} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-89dad140495fae168ea6b37fa797cbe0_l3.png "Rendered by QuickLaTeX.com")

 において、
において、
 より第1項と第2項は直交することから
より第1項と第2項は直交することから
 を最小化する最小2乗解と呼ばれます。
を最小化する最小2乗解と呼ばれます。 の行列指数関数
の行列指数関数








 で、指数法則は可換な行列に対してのみ成立することです。これは
で、指数法則は可換な行列に対してのみ成立することです。これは




 が可換(
が可換( )でなければならないからです。
)でなければならないからです。 は
は とおけば出ます。
とおけば出ます。 は一般項が
は一般項が
 は
は
 の場合、
の場合、 は次の3つに分類されます。
は次の3つに分類されます。![\displaystyle{1^{\circ}\ \lambda(A)=\{\lambda_1,\lambda_2\} \ \Rightarrow\ \Lambda_1=\left[\begin{array}{cc} \lambda_1 & 0 \\ 0 & \lambda_2 \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-77a0cd9574396b231d60f7830fb6d69f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{2^{\circ}\ \lambda(A)=\{\lambda_R\pm j\lambda_I\} \ \Rightarrow\ \Lambda_2=\left[\begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-879699fa498497a4834df1c85226d7b5_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{3^{\circ}\ \lambda(A)=\{\lambda,\lambda\} \ \Rightarrow\ \Lambda_3=\left[\begin{array}{cc} \lambda & 1 \\ 0 & \lambda \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9ba5a8193569c571e7063b6f4c64d2c5_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{1^{\circ}\quad \exp(\Lambda_1 t)= \left[\begin{array}{cc} e^{\lambda_1t} & 0 \\ 0 & e^{\lambda_2 t} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-78491525de7bdef6a101db1e48960b05_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{2^{\circ}\quad \exp(\Lambda_2 t)=e^{\lambda_R t} \left[\begin{array}{cc} \cos(\lambda_It) & \sin(\lambda_It) \\ -\sin(\lambda_It) & \cos(\lambda_It) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8a55d173069d9795cca0e6aa04464396_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{3^{\circ}\quad \exp(\Lambda_3 t)=e^{\lambda t} \left[\begin{array}{cc} 1 & t \\ 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9d70d9ee8645b48c80b2f53bac3f1724_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array}\right]= \underbrace{\lambda_RI_2}_{X}+ \underbrace{\lambda_I \left[\begin{array}{cc} 0 & 1 \\ -1 & 0 \end{array}\right]}_{Y} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-90093f23486e9ebe543a4f748c41bfee_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left[\begin{array}{cc} \lambda & 1 \\ 0 & \lambda \end{array}\right]= \underbrace{\lambda I_2}_{X}+ \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 0 & 0 \end{array}\right]}_{Y} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b6261249b8a119844a069dd65ff1df8e_l3.png "Rendered by QuickLaTeX.com")
 の場合、
の場合、![\displaystyle{1^{\circ}\ \lambda(A)=\{\lambda_1,\lambda_2,\lambda_3\} \ \Rightarrow\ \Lambda_1=\left[\begin{array}{ccc} \lambda_1 & 0 & 0\\ 0 & \lambda_2 & 0\\ 0 & 0 & \lambda_3 \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3bd2b1a89b6bfe05ac946135ab4a5d46_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{2^{\circ}\ \lambda(A)=\{\lambda_R\pm j\lambda_I,\lambda\} \ \Rightarrow\ \Lambda_2=\left[\begin{array}{ccc} \lambda_R & \lambda_I & 0 \\ -\lambda_I & \lambda_R & 0 \\ 0 & 0 & \lambda \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8d85c1f19ccd0787c5b71e7d54877f24_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{3^{\circ}\ \lambda(A)=\{\lambda,\lambda,\lambda\} \ \Rightarrow\ \Lambda_3=\left[\begin{array}{ccc} \lambda & 1 & 0\\ 0 & \lambda & 1\\ 0 & 0 & \lambda \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a9eba9ac8ad743586bd7194d7fa3fa9d_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{4^{\circ}\ \lambda(A)=\{\lambda,\lambda,\lambda'\} \ \Rightarrow\ \Lambda_4=\left[\begin{array}{ccc} \lambda & 1 & 0\\ 0 & \lambda & 0\\ 0 & 0 & \lambda' \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a07d669a93607f058df5310169859209_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{1^{\circ}\quad \exp(\Lambda_1 t)= \left[\begin{array}{ccc} e^{\lambda_1t} & 0 & 0\\ 0 & e^{\lambda_2 t} & 0\\ 0 & 0 & e^{\lambda_3 t} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a63717de8968d9c6311bc7099c27239e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{2^{\circ}\quad \exp(\Lambda_2 t)= \left[\begin{array}{ccc} e^{\lambda_R t}\cos(\lambda_It) & e^{\lambda_R t}\sin(\lambda_It) & 0\\ -e^{\lambda_R t}\sin(\lambda_It) & e^{\lambda_R t}\cos(\lambda_It) & 0\\ 0 & 0 & e^{\lambda t} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-13e0a88c983f834e8e6fbecebc725300_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{3^{\circ}\quad \exp(\Lambda_3 t)=e^{\lambda t} \left[\begin{array}{ccc} 1 & t & \frac{t^2}{2} \\ 0 & 1 & t \\ 0 & 0 & 1 \\ \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-017f57a48ebbb02c3f52a23e04f45293_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{4^{\circ}\quad \exp(\Lambda_4 t)= \left[\begin{array}{ccc} e^{\lambda t} & te^{\lambda t} & 0\\ 0 & e^{\lambda t} & 0\\ 0 & 0 & e^{\lambda t} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-657e4756bd61e0d0a2b833dfd26b89b3_l3.png "Rendered by QuickLaTeX.com")

 )
) ,
,  ,
,  は実数)。
は実数)。![\displaystyle{1^{\circ}\quad J(\lambda,m)= \left[\begin{array}{cccc} \lambda & 1 & & \\ & \lambda & \ddots & \\ & & \ddots & 1 \\ & & & \lambda \end{array}\right]\in{\bf R}^{m\times m} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-04756fbeb2c116fc5699aa675a993865_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{2^{\circ}\quad K(\lambda_{R},\lambda_{I},\ell)= \left[\begin{array}{c|c|cc|c} \begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array} & \begin{array}{cc} 1 & 0 \\ 0 & 1 \end{array} & & \\ \hline & \begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array} & \ddots & & \\ \hline & & & & \\ \hline & & & \ddots & \begin{array}{cc} 1 & 0 \\ 0 & 1 \end{array} \\ \hline & & & & \begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array} \end{array}\right]\in{\bf R}^{2\ell\times 2\ell} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c2457aec06eab348db71633eafce1fb6_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{1^{\circ}\quad \exp(J(\lambda,m)t)=e^{\lambda t} \left[\begin{array}{ccccc} 1 & t & \frac{t^2}{2} & \cdots & \frac{t^{m-1}}{(m-1)!} \\ & 1 & t & \ddots & \vdots \\ & & 1 & \ddots & \frac{t^2}{2} \\ & & & \ddots & t \\ & & & & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-214e860d644b198e7698b96f6af38b67_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{2^{\circ}\quad \exp(K(\lambda_{R},\lambda_{I},\ell)t)= \exp(J(\lambda_R,\ell)t) \bigotimes e^{\lambda_R t} \left[\begin{array}{cc} \cos\lambda_It & \sin\lambda_It \\ -\sin\lambda_It & \cos\lambda_It \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2987a48b32c63248d2ecf0d972e6424e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ J(\lambda,m)= \underbrace{\lambda I_m}_{X}+ \underbrace{ \left[\begin{array}{cccc} 0 & 1 & & \\ & 0 & \ddots & \\ & & \ddots & 1 \\ & & & 0 \end{array}\right]}_{Y} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9840463b7dde1311b1a95f279ea67627_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ K(\lambda_{R},\lambda_{I},\ell)= \underbrace{\left[\begin{array}{cccc} \lambda_R & 1 & & \\ & \lambda_R & \ddots & \\ & & \ddots & 1 \\ & & & \lambda_R \end{array}\right] \otimes I_2 }_{X}+ \underbrace{I_\ell\otimes \lambda_I \left[\begin{array}{cc} 0 & 1 \\ -1 & 0 \end{array}\right] }_{Y} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c2321bffd746beb1183eafb2647ad175_l3.png "Rendered by QuickLaTeX.com")

 が可換、
が可換、 と
と が可換であれば、
が可換であれば、



 は適当な
は適当な に対して、
に対して、 のとき
のとき となるための条件は
となるための条件は
 (
( )の解のグラフを見ると、
)の解のグラフを見ると、 の場合は、漸近安定ではないが、発散はしないので、不安定とまではいえないのではないかと思うかもしれません。したがって零の固有値を不安定とみなすのか、安定とみなすか迷うところです。しかし、
の場合は、漸近安定ではないが、発散はしないので、不安定とまではいえないのではないかと思うかもしれません。したがって零の固有値を不安定とみなすのか、安定とみなすか迷うところです。しかし、 において、
において、![A=\left[\begin{array}{cc} 0& 1\\ 0& 0 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-376a786d94c78b706c067edc1ab154bc_l3.png "Rendered by QuickLaTeX.com") の場合、解は
の場合、解は![x(t)=\left[\begin{array}{cc} 1& t\\ 0& 1 \end{array}\right]x(0)](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-cd138b72c733ad352d3b5b437f9acd95_l3.png "Rendered by QuickLaTeX.com") となって、
となって、 の第2要素が零でない場合は発散します。したがって、一般には零の固有値は不安定とみなします。
の第2要素が零でない場合は発散します。したがって、一般には零の固有値は不安定とみなします。 の代数的重複度を
の代数的重複度を とし、次が成り立つとします。
とし、次が成り立つとします。
 が発散しないための必要十分条件であることが知られています。
が発散しないための必要十分条件であることが知られています。 :
: ![\underbrace{ \left[\begin{array}{cc} a_{11} & a_{12} \\ a_{21} & a_{22} \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{cc} v_{i1} \\ v_{i2} \end{array}\right] }_{v_i} = \lambda_i \underbrace{ \left[\begin{array}{cc} v_{i1} \\ v_{i2} \end{array}\right] }_{v_i}\quad(i=1,2)](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0831f4b46506687c014d958aea592423_l3.png "Rendered by QuickLaTeX.com")
 を満足する
を満足する が必要。
が必要。

![\left\{\begin{array}{cc} Av_1=\lambda_1v_1\\ Av_2=\lambda_2v_2 \end{array}\right. \Leftrightarrow A \underbrace{ \left[\begin{array}{cc} v_1 & v_2 \end{array}\right] }_{V} = \underbrace{ \left[\begin{array}{cc} v_1 & v_2 \end{array}\right] }_{V} \underbrace{ \left[\begin{array}{cc} \lambda_1 & 0\\ 0 & \lambda_2 \end{array}\right] }_{\Lambda}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6d70b3d97f81ed2c410f999d9f9b0f72_l3.png "Rendered by QuickLaTeX.com")
 がつぎの形式となるように変換できます。
がつぎの形式となるように変換できます。
![\displaystyle{ J(\lambda,m)= \left[\begin{array}{cccc} \lambda & 1 & & \\ & \lambda & \ddots & \\ & & \ddots & 1 \\ & & & \lambda \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-10b37546f982ad32792ade27dcbb5bc5_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ K(\lambda_{R},\lambda_{I},\ell)= \left[\begin{array}{c|c|cc|c} \begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array} & \begin{array}{cc} 1 & 0 \\ 0 & 1 \end{array} & & \\ \hline & \begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array} & \ddots & & \\ \hline & & & & \\ \hline & & & \ddots & \begin{array}{cc} 1 & 0 \\ 0 & 1 \end{array} \\ \hline & & & & \begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6405a058d51a3c2f5859cfcee7d7fdcd_l3.png "Rendered by QuickLaTeX.com")
 のサイズは
のサイズは のサイズは
のサイズは です。また、
です。また、 は実数、指定されていない要素はすべて零です。
は実数、指定されていない要素はすべて零です。![\displaystyle{1^{\circ}\ \lambda(A)=\{\lambda_1,\lambda_2\} \ \Rightarrow\ \Lambda=\left[\begin{array}{cc} \lambda_1 & 0 \\ 0 & \lambda_2 \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b57c22245fc947fd77f26e3673dfaa3a_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{2^{\circ}\ \lambda(A)=\{\lambda_R\pm j\lambda_I\} \ \Rightarrow\ \Lambda=\left[\begin{array}{cc} \lambda_R & \lambda_I \\ -\lambda_I & \lambda_R \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6c867e41809093f0483769db80f72813_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{3^{\circ}\ \lambda(A)=\{\lambda,\lambda\} \ \Rightarrow\ \Lambda=\left[\begin{array}{cc} \lambda & 1 \\ 0 & \lambda \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5b5ea5e1f8a548e5a6703ba7720106f3_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{1^{\circ}\ \lambda(A)=\{\lambda_1,\lambda_2,\lambda_3\} \ \Rightarrow\ \Lambda=\left[\begin{array}{ccc} \lambda_1 & 0 & 0\\ 0 & \lambda_2 & 0\\ 0 & 0 & \lambda_3 \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-84b04905b6ac45ff1964c63813a82081_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{2^{\circ}\ \lambda(A)=\{\lambda_R\pm j\lambda_I,\lambda\} \ \Rightarrow\ \Lambda=\left[\begin{array}{ccc} \lambda_R & \lambda_I & 0 \\ -\lambda_I & \lambda_R & 0 \\ 0 & 0 & \lambda \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a8c54381683d100c98707a0956c94b04_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{3^{\circ}\ \lambda(A)=\{\lambda,\lambda,\lambda\} \ \Rightarrow\ \Lambda=\left[\begin{array}{ccc} \lambda & 1 & 0\\ 0 & \lambda & 1\\ 0 & 0 & \lambda \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-76e61732a9aaced850d3e6e0c9170aec_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{4^{\circ}\ \lambda(A)=\{\lambda,\lambda,\lambda'\} \ \Rightarrow\ \Lambda=\left[\begin{array}{ccc} \lambda & 1 & 0\\ 0 & \lambda & 0\\ 0 & 0 & \lambda' \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2a9b6d31f9cc1646e9fdd22b4ac56857_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{ Q=\left[\begin{array}{cc} q_1 & q_3 \\ q_3 & q_2 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-73a18d410dce8076108a27a0aeacbc3b_l3.png "Rendered by QuickLaTeX.com")



![\displaystyle{ v_1=\left[\begin{array}{c} q_1-q_2+\sqrt{D} \\ 2q_3 \end{array}\right],\quad v_2=\left[\begin{array}{c} q_1-q_2-\sqrt{D} \\ 2q_3 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-40f57ea7659a44625cc71f67cd6ab726_l3.png "Rendered by QuickLaTeX.com")

 が正定行列
が正定行列




![\underbrace{ \left[\begin{array}{cc} x_1\\ x_2 \end{array}\right] }_{x} \in{\rm\bf R}^2](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0fa82c1b4a8af7e3e26bf1f403b9c7db_l3.png "Rendered by QuickLaTeX.com")


](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-78c93c34c667d667a9ebbfb88dbfa384_l3.png "Rendered by QuickLaTeX.com")
](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-97304e22caaf0ac973a4c28144ad12f3_l3.png "Rendered by QuickLaTeX.com")

![0_{2\times 3}=\left[\begin{array}{ccc} 0 & 0 & 0 \\ 0 & 0 & 0 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a09d82b56b7564c3b24a5e9e83e81508_l3.png "Rendered by QuickLaTeX.com")

![A=\left[\begin{array}{cc} a_{11} & a_{12} \\ a_{21} & a_{22} \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0debc5174a4814fa95f99ab1f3342c07_l3.png "Rendered by QuickLaTeX.com")

![I_2:=\left[\begin{array}{cc} 1 & 0 \\ 0 & 1 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9c6db8da17f37c745382cb2673309ff6_l3.png "Rendered by QuickLaTeX.com")
![{\rm diag}\{d_1,d_2\}:=\left[\begin{array}{cc} d_{1} & 0 \\ 0 & d_{2} \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-cceff4f03429470a7e8a37cbe19d56a1_l3.png "Rendered by QuickLaTeX.com")
![B=\left[\begin{array}{cc} b_{11} & b_{12} \\ b_{21} & b_{22} \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6c3fe86fd833b845ac3ab8195aa137b9_l3.png "Rendered by QuickLaTeX.com")
![A\pm B=\left[\begin{array}{cc} a_{11}\pm b_{11} & a_{12}\pm b_{12} \\ a_{21}\pm b_{21} & a_{22}\pm b_{22} \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bfe9b2d4623891ca7d2f6a8e145125b8_l3.png "Rendered by QuickLaTeX.com")
![AB=\left[\begin{array}{cc} a_{11}b_{11}+a_{12}b_{21} & a_{11}b_{12}+a_{12}b_{22} \\ a_{21}b_{11}+a_{22}b_{21} & a_{21}b_{12}+a_{22}b_{22} \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5829d39848874a49737932446ccd36d7_l3.png "Rendered by QuickLaTeX.com")

![\alpha A=\left[\begin{array}{cc} \alpha a_{11} & \alpha a_{12} \\ \alpha a_{21} & \alpha a_{22} \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a44a9f102f300b7447048e43e9bd370f_l3.png "Rendered by QuickLaTeX.com")


![A^T=\left[\begin{array}{cc} a_{11} & a_{21} \\ a_{12} & a_{22} \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4d336a9846daa7a283dd7be111e7fd37_l3.png "Rendered by QuickLaTeX.com")

![A\bigotimes B = \left[\begin{array}{cc} a_{11}B & a_{12}B \\ a_{21}B & a_{22}B \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2f25cb1ac3a966a71a8da6e2e6a87588_l3.png "Rendered by QuickLaTeX.com")





 を満足する正方行列
を満足する正方行列 を満足する正方行列
を満足する正方行列 を満足する正則行列
を満足する正則行列
![A^{-1}=\frac{1}{\det A} \left[\begin{array}{cc} a_{22} & -a_{12} \\ -a_{21} & a_{11} \end{array}\right]\ (\det A\ne0)](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2815df77e5dbf8d9a92cfc40f983083d_l3.png "Rendered by QuickLaTeX.com")



 は線形独立(1次独立):
は線形独立(1次独立):


![\displaystyle{{\rm rank}\left[\begin{array}{ccc} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \end{array}\right] ={\rm rank}\left[\begin{array}{ccc} \left[\begin{array}{ccc} a_{11} & a_{12} & a_{13} \end{array}\right]\\ \left[\begin{array}{ccc} a_{21} & a_{22} & a_{23} \end{array}\right] \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-053f5f3e7ffde95b08b966618298d384_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{{\rm rank}\left[\begin{array}{ccc} a_{11} & a_{12} \\ a_{21} & a_{22} \\ a_{31} & a_{32} \end{array}\right] ={\rm rank}\left[\begin{array}{ccc} \left[\begin{array}{ccc} a_{11} \\ a_{21} \\ a_{31} \end{array}\right] \left[\begin{array}{ccc} a_{12} \\ a_{22} \\ a_{32} \end{array}\right] \end{array}\right]}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0c416f3c23e28236351848860ebc9c23_l3.png "Rendered by QuickLaTeX.com")


![\Leftrightarrow \underbrace{ \left[\begin{array}{cc} a_{11} & a_{12} \\ a_{21} & a_{22} \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{cc} x_1 \\ x_2 \end{array}\right] }_{x} = \underbrace{ \left[\begin{array}{cc} b_1 \\ b_2 \end{array}\right] }_{b}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1e69aad8154a0c48cc53582eb79dd64e_l3.png "Rendered by QuickLaTeX.com")
 の解は
の解は として一意に定まります。
として一意に定まります。



