補遺:偏差系の安定化SM制御…Homework
レギュレータ問題は平衡状態の安定化、追値問題は他の平衡状態への安定化を意味します。LQI制御のところでみたように、偏差系を導入すれば、追値問題は偏差系の安定化問題となります。この観点から積分動作導入による追従SM制御を見直してみます。
[1] 定値外乱を受ける制御対象

の出力を、次のコマンド(定値目標)

に追従させることを考えます。そのために、積分動作

を考え、次の拡大系を構成します。
![\displaystyle{(4)\quad %\underbrace{ \left[\begin{array}{c} \dot{x}(t) \\ \dot{x}_I(t) \end{array}\right] %}_{\dot{x}_E(t)} = %\underbrace{ \left[\begin{array}{cc} A & 0 \\ C & 0 \end{array}\right] %}_{A_E} %\underbrace{ \left[\begin{array}{c} x(t) \\ x_I(t) \end{array}\right] %}_{x_E(t)} + %\underbrace{ \left[\begin{array}{c} B \\ 0 \end{array}\right] %}_{B_E} u(t) + %\underbrace{ \left[\begin{array}{c} w \\ -r \end{array}\right] %}_{w_E} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8eae1302f0f9a0f92ca6ad1023069780_l3.png "Rendered by QuickLaTeX.com")
定常状態では
![\displaystyle{(5)\quad \left[\begin{array}{c} 0 \\ 0 \end{array}\right] = \left[\begin{array}{cc} A & 0 \\ C & 0 \end{array}\right] \left[\begin{array}{c} x_\infty \\ x_{I\infty} \end{array}\right] + \left[\begin{array}{c} B \\ 0 \end{array}\right] u_\infty + \left[\begin{array}{c} w \\ -r \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1f79558c23720658ef469eaed967aa38_l3.png "Rendered by QuickLaTeX.com")
を得ます( ,
, ,
, は定数ベクトル)。まず、(4)から(5)を引いて、つぎの偏差系を得ます。
は定数ベクトル)。まず、(4)から(5)を引いて、つぎの偏差系を得ます。
偏差系E1:
![\displaystyle{(6)\quad \underbrace{ \frac{d}{dt} \left[\begin{array}{c} x(t)-x_\infty \\ x_I(t)-x_{I\infty} \end{array}\right] }_{\dot{x}_{E1}(t)} = \underbrace{ \left[\begin{array}{cc} A & 0 \\ C & 0 \end{array}\right] }_{A_{E1}} \underbrace{ \left[\begin{array}{c} x(t)-x_\infty \\ x_I(t)-x_{I\infty} \end{array}\right] }_{x_{E1}(t)} + \underbrace{ \left[\begin{array}{c} B \\ 0 \end{array}\right] }_{B_{E1}} (u(t)-u_\infty) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-31c37a9934e5cdea3c7a11d0c5575b8d_l3.png "Rendered by QuickLaTeX.com")
この両辺を微分すれば、状態変数の中の定数ベクトルを除くことができて
偏差系E2:
![\displaystyle{(7)\quad \underbrace{ \frac{d}{dt} \left[\begin{array}{c} {\dot x}(t) \\ y(t)-r \end{array}\right] }_{\dot{x}_{E2}(t)} = \underbrace{ \left[\begin{array}{cc} A & 0 \\ C & 0 \end{array}\right] }_{A_{E2}} \underbrace{ \left[\begin{array}{c} {\dot x}(t) \\ y(t)-r \end{array}\right] }_{x_{E2}(t)} + \underbrace{ \left[\begin{array}{c} B \\ 0 \end{array}\right] }_{B_{E2}} {\dot u}(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3876d07fd5a0b32e63fa8f91e20b8ad7_l3.png "Rendered by QuickLaTeX.com")
を得ます。さらに、(1)の状態方程式と観測方程式をまとめた
![\displaystyle{(8)\quad \left[\begin{array}{c} {\dot x}(t)-w \\ y(t) \end{array}\right] = \underbrace{ \left[\begin{array}{cc} A & B \\ C & 0 \end{array}\right] }_{S_E} \left[\begin{array}{c} x(t) \\ u(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-28a64d5f6becf5dc458bf65746e1d706_l3.png "Rendered by QuickLaTeX.com")
から、(5)すなわち
![\displaystyle{(9)\quad \left[\begin{array}{c} -w \\ r \end{array}\right] = \underbrace{ \left[\begin{array}{cc} A & B \\ C & 0 \end{array}\right] }_{S_E} \left[\begin{array}{c} x_\infty \\ u_\infty \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-70b5e47d55a371255ff67868bd470bbe_l3.png "Rendered by QuickLaTeX.com")
を引いて、つぎの関係式が成り立ちます。
![\displaystyle{(10)\quad \underbrace{ \left[\begin{array}{c} {\dot x}(t) \\ y(t)-r \end{array}\right] }_{x_{E2}(t)} = \underbrace{ \left[\begin{array}{cc} A & B \\ C & 0 \end{array}\right] }_{S_E} \underbrace{ \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{x_{E3}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d19845bc6a9ba5e6b6ffcc474aa170e5_l3.png "Rendered by QuickLaTeX.com")
これを用いて、偏差系E2に座標変換を行えば
偏差系E3:
![\displaystyle{(11)\quad \underbrace{ \frac{d}{dt} \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{\dot{x}_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} A & B \\ 0 & 0 \end{array}\right] }_{A_{E3}} \underbrace{ \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{x_{E3}(t)} + \underbrace{ \left[\begin{array}{c} 0 \\ I_m \end{array}\right] }_{B_{E3}} {\dot u}(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e12324e6656148ca4b9a647055b6df5a_l3.png "Rendered by QuickLaTeX.com")
を得ます。ここで、つぎの関係式を用いました。
![\displaystyle{(12)\quad \underbrace{ \left[\begin{array}{cc} A & 0 \\ C & 0 \end{array}\right] }_{A_{E2}} \underbrace{ \left[\begin{array}{cc} A & B \\ C & 0 \end{array}\right] }_{S_E} = \underbrace{ \left[\begin{array}{cc} A & B \\ C & 0 \end{array}\right] }_{S_E} \underbrace{ \left[\begin{array}{cc} A & B \\ 0 & 0 \end{array}\right] }_{A_{E3}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-790b5d3825c0777b3d3285e5fd6b1394_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(13)\quad \underbrace{ \left[\begin{array}{c} B \\ 0 \end{array}\right] }_{B_{E2}} = \underbrace{ \left[\begin{array}{cc} A & B \\ C & 0 \end{array}\right] }_{S_E} \underbrace{ \left[\begin{array}{c} 0 \\ I_m \end{array}\right] }_{B_{E3}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c15c3050bb3a9a40764927acc7268c81_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(14)\quad \underbrace{ \left[\begin{array}{cc} 0 & I_m \end{array}\right] }_{C_{E2}} \underbrace{ \left[\begin{array}{cc} A & B \\ C & 0 \end{array}\right] }_{S_E} = \underbrace{ \left[\begin{array}{cc} C & 0 \end{array}\right] }_{C_{E3}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-fa6e5db5cb4e863339f8797520d1a2b2_l3.png "Rendered by QuickLaTeX.com")
以下では、この偏差系E3が標準形となっていることに注意して、SMCを設計します。
(11)を、改めて次のように書きます。
![\displaystyle{(15)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} \dot x_1(t)\\ \dot x_2(t) \end{array}\right] }_{\dot{x}_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} A & B \\ 0 & 0 \end{array}\right] }_{A_{E3}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)} + \underbrace{ \left[\begin{array}{c} 0\\ I_m \end{array}\right] }_{B_{E3}} {\dot u}(t)\\ (x_1(t)=x(t)-x_\infty, x_2(t)=u(t)-u_\infty) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-245a3ce1c7bbd57f344bac4b6ccdca9c_l3.png "Rendered by QuickLaTeX.com")
スイッチング関数として、次式を考えます。
![\displaystyle{(16)\quad s(t)= \underbrace{ \left[\begin{array}{cc} S_1 & S_2 \\ \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)} = \underbrace{S_2 \left[\begin{array}{cc} M & I \\ \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)} \ (M=S_2^{-1}S_1) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-cdba45c2f46a4ded8109c4031c43eef8_l3.png "Rendered by QuickLaTeX.com")
(15)に対して、座標変換
![\displaystyle{(17)\quad \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{x'_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} I & 0 \\ S_1 & S_2 \\ \end{array}\right] }_{T_s} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)}\\ \Leftrightarrow \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} I & 0 \\ -S_2^{-1}S_1 & S_2^{-1} \\ \end{array}\right] }_{T_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{x'_{E3}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-272d89e0452752b99489c956de386a73_l3.png "Rendered by QuickLaTeX.com")
を行って、次式を得ます。
![\displaystyle{(18)\quad \underbrace{ \left[\begin{array}{c} \dot x_1(t)\\ \dot s(t) \end{array}\right] }_{\dot{x}'_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} \bar{A}_{11} & \bar{A}_{12} \\ \bar{A}_{21} & \bar{A}_{22} \\ \end{array}\right] }_{T_sA_{E3}T_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{x'_{E3}(t)} + \underbrace{ \left[\begin{array}{cc} 0\\ S_2 \end{array}\right] }_{T_sB_{E3}} {\dot u}(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5ab2f4f17de6fee9605aa2556d7f248c_l3.png "Rendered by QuickLaTeX.com")

以下では、 が安定行列となるようにスイッチング関数が選ばれていると仮定します。
が安定行列となるようにスイッチング関数が選ばれていると仮定します。
このとき、スライディングモード制御則(SM制御則、SMC則)

を、2次安定性
![\displaystyle{(21)\quad \begin{array}{lll} V(\bar{x})= \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right]^T }_{\bar{x}^T(t)} \underbrace{ \left[\begin{array}{cc} P_1 & 0\\ 0 & P_2 \end{array}\right] }_{P} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{\bar{x}(t)}\\ \Rightarrow \dot{V}(\bar{x})\le - \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right]^T }_{\bar{x}^T(t)} \underbrace{ \left[\begin{array}{cc} Q_1 & 0\\ 0 & I \end{array}\right] }_{Q} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{\bar{x}(t)} \end{array}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7c77aa3ff56d9793c30ad999001a2185_l3.png "Rendered by QuickLaTeX.com")
すなわち

が成り立つように決定します( ,
,  ,
,  )。
)。
[2] 可到達性の検討
等価制御は
![\displaystyle{(22)\quad \begin{array}{l} s(t)=0\Rightarrow\dot{s}(t)=0 \Rightarrow 0=\bar{A}_{21}x_1(t)+\bar{A}_{22}s(t)+S_2{\dot u}(t)\\ \Rightarrow {\dot u}_{eq}(t)=-\underbrace{S_2^{-1}}_{(SB_{E3})^{-1}} \underbrace{\left[\begin{array}{cc} \bar{A}_{21} & \bar{A}_{22} \\ \end{array}\right]x'_{E3}(t)}_{SA_{E3}x_{E3}(t)}} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3ad4a24162e39c9dd7341a0db806bc67_l3.png "Rendered by QuickLaTeX.com")
のように得られます。(20)の第1項 は、この等価制御をベースして
は、この等価制御をベースして
![\displaystyle{(23)\quad \begin{array}{l} {\dot u}_\ell(t)=-\underbrace{S_2^{-1}}_{(SB_{E3})^{-1}} \underbrace{(\left[\begin{array}{cc} \bar{A}_{21} & \bar{A}_{22} \\ \end{array}\right]x'_{E3}(t)-\Phi s(t))}_{(SA_{E3}-\Phi S)x_{E3}(t)}} \end{array}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4da62d9774c6809e24338ce1ff05a030_l3.png "Rendered by QuickLaTeX.com")
のように構成します( は安定行列)。このとき閉ループ系は次式で与えられます。
は安定行列)。このとき閉ループ系は次式で与えられます。
![\displaystyle{(24)\quad \begin{array}{l} \left[\begin{array}{c} \dot{x}_1(t)\\ \dot{s}(t) \end{array}\right] = \left[\begin{array}{cc} \bar{A}_{11} & \bar{A}_{12} \\ 0 & \Phi \\ \end{array}\right] \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] + \left[\begin{array}{c} 0\\ S_2{\dot u}_n(t) \end{array}\right] \end{array }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-099b020da252117a5d07864d8fd6a593_l3.png "Rendered by QuickLaTeX.com")
すなわち

ここで、は安定行列なので

を満たすを選ぶことができます。これを用いて

と選びます( は定数)。このとき次式が成り立ちます。
は定数)。このとき次式が成り立ちます。

[3] スライディングモードの検討
は安定行列なので

を満たすを選ぶことができます。

[4] 積分動作をもつSMC
上で求めた偏差系E3に対するSMCは次式で与えられました。



これらを積分して、制御対象(1)に対する積分動作をもつSMCを導出します。

まず(32)は(10)を用いて次式のように書けます。
![\displaystyle{(35)\quad {\dot u}_\ell(t)=- \underbrace{ (SB_{E3})^{-1}(SA_{E3}-\Phi S)S_E^{-1} }_{\left[\begin{array}{cc} F & F_I \end{array}\right]} \underbrace{ \left[\begin{array}{c} {\dot x}(t) \\ y(t)-r \end{array}\right] }_{x_{E2}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-edb851ab679593bf698b480644ba82ce_l3.png "Rendered by QuickLaTeX.com")
これを積分して

次に(33)は(10)を用いて次式のように書けます。
![\displaystyle{(37)\quad {\dot u}_n(t) =-S_2^{-1}\rho\, {\rm sgn}( \underbrace{ P_2SS_E^{-1} }_{\left[\begin{array}{cc} G & G_I \end{array}\right]} \underbrace{ \left[\begin{array}{c} {\dot x}(t) \\ y(t)-r \end{array}\right] }_{x_{E2}(t)}) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-913747aecf41d0c7b9c2a72e8ab5d520_l3.png "Rendered by QuickLaTeX.com")
これを積分すれば

ここで、 に注意し、(25)の第1式を用いて
に注意し、(25)の第1式を用いて は
は
![\displaystyle{(39)\quad \begin{array}{l} \underbrace{\dot{x}_1(t)}_{\dot{x}(t)}=\underbrace{(A-BM)}_{\bar{A}_{11}}x_1(t)+\underbrace{BS_2^{-1}}_{\bar{A}_{12}}\underbrace{(S_1x_1(t)+S_2x_2(t))}_{s(t)}\\ =(A-BM)x_1(t)+BS_2^{-1}S_2(Mx_1(t)+x_2(t))\\ =Ax_1(t)+Bx_2(t)\\ =Ax(t)+Bu(t)-\left[\begin{array}{cc} A & B \end{array}\right] \left[\begin{array}{c} x_\infty \\ u_\infty \end{array}\right]\\ =Ax(t)+Bu(t)-\left[\begin{array}{cc} A & B \end{array}\right]S_E^{-1} \left[\begin{array}{c} -w \\ r \end{array}\right]\\ =Ax(t)+Bu(t)-\left[\begin{array}{cc} I & 0 \end{array}\right] \left[\begin{array}{c} -w \\ r \end{array}\right]\\ =Ax(t)+Bu(t)+w \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2ba4e67edf54d3b4672c514eba81c975_l3.png "Rendered by QuickLaTeX.com")
となって元の状態方程式となりますが、 を無視し、
を無視し、 の近似値を使うことも一手段かもしれません。
の近似値を使うことも一手段かもしれません。
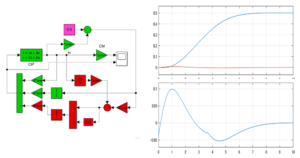
[5] 数値例(1)

![\displaystyle{(109)\quad \left[\begin{array}{c} -w \\ r \end{array}\right] = \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right] }_{S_E} \left[\begin{array}{c} x_\infty \\ u_\infty \end{array}\right] \Rightarrow \left[\begin{array}{c} x_\infty \\ u_\infty \end{array}\right]= \left[\begin{array}{c} r \\ -w \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b6f19bc137b345cd02f056ded5359628_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(111)\quad \underbrace{ \frac{d}{dt} \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{\dot{x}_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 0 & 0 \end{array}\right] }_{A_{E3}} \underbrace{ \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{x_{E3}(t)} + \underbrace{ \left[\begin{array}{c} 0 \\ 1 \end{array}\right] }_{B_{E3}} {\dot u}(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-39ef4e33ccbbc6089ea56a80794721bd_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(116)\quad s(t)= \underbrace{ \left[\begin{array}{cc} s_1 & s_2 \\ \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)} = \underbrace{s_2 \left[\begin{array}{cc} m & 1 \\ \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)} \ (m=s_2^{-1}s_1) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0f6d44c1de2bf58be8fa0712e50791dd_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(117)\quad \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{x'_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} 1 & 0 \\ s_1 & s_2 \\ \end{array}\right] }_{T_s} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)}\\ \Leftrightarrow \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} 1 & 0 \\ -s_2^{-1}s_1 & s_2^{-1} \\ \end{array}\right] }_{T_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{x'_{E3}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ae2c14797a0013427aaf5c62507328fe_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(118)\quad \underbrace{ \left[\begin{array}{c} \dot x_1(t)\\ \dot s(t) \end{array}\right] }_{\dot{x}'_{E3}(t)} = \underbrace{ \left[\begin{array}{cc} -m & s_2^{-1} \\ -s_1m & m \\ \end{array}\right] }_{T_sA_{E3}T_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{x'_{E3}(t)} + \underbrace{ \left[\begin{array}{cc} 0\\ s_2 \end{array}\right] }_{T_sB_{E3}} {\dot u}(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-09497ea1301736f936b51225906c697c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(123)\quad \begin{array}{l} {\dot u}_\ell(t)= -\underbrace{s_2^{-1}}_{(SB_{E3})^{-1}} \underbrace{(\left[\begin{array}{cc} -s_1m & m \\ \end{array}\right]x'_{E3}(t)-\Phi s(t))}_{(SA_{E3}-\Phi S)x_{E3}(t)}}\\ =-s_2^{-1}(\left[\begin{array}{cc} 0 & ms_2 \\ \end{array}\right]- \left[\begin{array}{cc} \Phi s_1 & \Phi s_2 \\ \end{array}\right])x_{E3}(t)\\ =-s_2^{-1}\left[\begin{array}{cc} -\Phi s_1 & ms_2-\Phi s_2 \\ \end{array}\right]x_{E3}(t)\\ =-\left[\begin{array}{cc} -\Phi m & m-\Phi \\ \end{array}\right] \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right] }_{S_E^{-1}} \underbrace{ \left[\begin{array}{c} {\dot x}(t) \\ y(t)-r \end{array}\right] }_{x_{E2}(t)}\\ =-\underbrace{(m-\Phi)}_{f}{\dot x}(t)+\underbrace{m(-\Phi)}_{f_I}(r-y(t))\\ \Rightarrow u_\ell(t)=-fx(t)+f_I\int_0^t (r-y(\tau))d\tau \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6aa7495d1adfe2e01b76d9d8229028e7_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(127)\quad \begin{array}{l} {\dot u}_n(t) =-s_2^{-1}\rho\, {\rm sgn}(\underbrace{-\frac{1}{2}\Phi^{-1}}_{p_2} \underbrace{ \left[\begin{array}{cc} s_1 & s_2 \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right] }_{S_E^{-1}} \underbrace{ \left[\begin{array}{c} {\dot x}(t) \\ y(t)-r \end{array}\right] }_{x_{E2}(t)})\\ =\rho\, {\rm sgn}(\frac{1}{2}\Phi^{-1} \left[\begin{array}{cc} 1 & m \end{array}\right] \left[\begin{array}{c} {\dot x}(t) \\ y(t)-r \end{array}\right])\\ =\rho\, {\rm sgn}(-\underbrace{\frac{1}{2}(-\Phi^{-1})}_{g}{\dot x}(t)+\underbrace{\frac{1}{2}m(-\Phi^{-1})}_{g_I} (r-y(t)))\\ \Rightarrow u_n(t)=\rho\,\int_0^t\underbrace{{\rm sgn}(-g{\dot x}(\tau)+g_I(r-y(\tau)))}_{0,\pm 1}d\tau \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c70ad4d12c7dc10a4700d71c3c2e1719_l3.png "Rendered by QuickLaTeX.com")
 ,
,  の場合のシミュレーション結果を次に示します。
の場合のシミュレーション結果を次に示します。

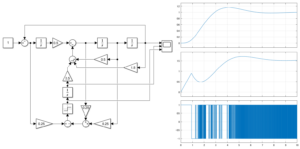
[5] 数値例(2)
![\displaystyle{(201)\quad \begin{array}{l} \dot{x}(t)= \underbrace{\left[\begin{array}{cc} 0 & 1 \\ 0 & 0 \end{array}\right]}_{A}x(t) +\underbrace{\left[\begin{array}{cc} 0 \\ 1 \end{array}\right]}_{B}u(t)+ \left[\begin{array}{cc} 0 \\ w \end{array}\right]\\ y(t)=\underbrace{\left[\begin{array}{cc} 1 & 0 \end{array}\right]}_{C}x(t)\\ \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ef113f64e22350dbc52f15182fe1a509_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(209)\quad \left[\begin{array}{c} 0 \\ -w \\ r \end{array}\right] = \underbrace{ \left[\begin{array}{ccc} 0 & 1 & 0 \\ 0 & 0 & 1 \\ 1 & 0 & 0 \end{array}\right] }_{S_E} \left[\begin{array}{c} x_{1\infty} \\ x_{2\infty} \\ u_\infty \end{array}\right] \Rightarrow \left[\begin{array}{c} x_{1\infty} \\ x_{2\infty} \\ u_\infty \end{array}\right]= \left[\begin{array}{c} r \\ 0 \\ -w \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-69beeb3b2a284a9be405782120deebbd_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(211)\quad \underbrace{ \frac{d}{dt} \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{\dot{x}_{E3}(t)} = \underbrace{ \left[\begin{array}{ccc} 0 & 1 & 0 \\ 0 & 0 & 1 \\ 0 & 0 & 0 \end{array}\right] }_{A_{E3}} \underbrace{ \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }_{x_{E3}(t)} + \underbrace{ \left[\begin{array}{c} 0 \\ 0 \\ 1 \end{array}\right] }_{B_{E3}} {\dot u}(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8e4db6573d9c0866d2409fc3290742b8_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(216)\quad \begin{array}{l} s(t)= \underbrace{ \left[\begin{array}{ccc} s_{11} & s_{12} & s_2 \\ \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)} = \underbrace{s_2 \left[\begin{array}{ccc} m_1 & m_2 & 1 \\ \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)}\\ (m_1=s_2^{-1}s_{11},m_2=s_2^{-1}s_{12}) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-400eb3876781e6270ec0fdecd65c935f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(217)\quad \begin{array}{l} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{x'_{E3}(t)} = \underbrace{ \left[\begin{array}{ccc} 1 & 0 & 0\\ 0 & 1 & 0\\ s_{11} & s_{12} & s_2 \\ \end{array}\right] }_{T_s} \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)}\Leftrightarrow\\ \underbrace{ \left[\begin{array}{c} x_1(t)\\ x_2(t) \end{array}\right] }_{x_{E3}(t)} = \underbrace{ \left[\begin{array}{ccc} 1 & 0 & 0\\ 0 & 1 & 0\\ -s_2^{-1}s_{11} & -s_2^{-1}s_{12} & s_2^{-1} \\ \end{array}\right] }_{T_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{x'_{E3}(t)} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-967eb06bf641a92d51f2f5dc0823ae03_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(218)\quad \underbrace{ \left[\begin{array}{c} \dot x_1(t)\\ \dot s(t) \end{array}\right] }_{\dot{x}'_{E3}(t)} = \underbrace{ \left[\begin{array}{ccc} 0 & 1 & 0\\ -m_1 & -m_2 & s_2^{-1} \\ -s_{12}m_1 & -s_{12}m_2 & m_2 \end{array}\right] }_{T_sA_{E3}T_s^{-1}} \underbrace{ \left[\begin{array}{c} x_1(t)\\ s(t) \end{array}\right] }_{x'_{E3}(t)} + \underbrace{ \left[\begin{array}{cc} 0\\ 0\\ s_2 \end{array}\right] }_{T_sB_{E3}} {\dot u}(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c09c2a528765c494ea49b0e4d526131e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(223)\quad \begin{array}{l} {\dot u}_\ell(t)= -\underbrace{s_2^{-1}}_{(SB_{E3})^{-1}} \underbrace{(\left[\begin{array}{ccc} -s_{12}m_1 & -s_{12}m_2 & m_2 \\ \end{array}\right]x'_{E3}(t)-\Phi s(t))}_{(SA_{E3}-\Phi S)x_{E3}(t)}}\\ =-s_2^{-1}(\left[\begin{array}{ccc} 0 & 0 & m_2s_2 \\ \end{array}\right]- \left[\begin{array}{ccc} \Phi s_{11} & \Phi s_{12} & \Phi s_2 \\ \end{array}\right])x_{E3}(t)\\ =-s_2^{-1}\left[\begin{array}{ccc} -\Phi s_{11} & -\Phi s_{12} & m_2s_2-\Phi s_2 \\ \end{array}\right]x_{E3}(t)\\ =-\left[\begin{array}{ccc} -\Phi m_1 & -\Phi m_2 & m_2-\Phi \\ \end{array}\right] \underbrace{ \left[\begin{array}{ccc} 0 & 0 & 1 \\ 1 & 0 & 0 \\ 0 & 1 & 0 \end{array}\right] }_{S_E^{-1}} \underbrace{ \left[\begin{array}{c} {\dot x}(t) \\ y(t)-r \end{array}\right] }_{x_{E2}(t)}\\ =-\underbrace{ \left[\begin{array}{cc} -\Phi m_2 & m_2-\Phi \\ \end{array}\right] }_{F}{\dot x}(t)+\underbrace{m_1(-\Phi)}_{F_I}(r-y(t))\\ \Rightarrow u_\ell(t)=-Fx(t)+F_I\int_0^t (r-y(\tau))d\tau \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a5fdce03c67f7578c2ac49db1237f4df_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(237)\quad \begin{array}{l} {\dot u}_n(t) =-s_2^{-1}\rho\, {\rm sgn}(\underbrace{-\frac{1}{2}\Phi^{-1}}_{p_2} \underbrace{ \left[\begin{array}{ccc} s_{11} & s_{12} & s_2 \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{ccc} 0 & 0 & 1 \\ 1 & 0 & 0 \\ 0 & 1 & 0 \end{array}\right] }_{S_E^{-1}} \underbrace{ \left[\begin{array}{c} {\dot x}(t) \\ y(t)-r \end{array}\right] }_{x_{E2}(t)})\\ =s_2^{-1}\rho\, {\rm sgn}(\frac{1}{2}\Phi^{-1} \left[\begin{array}{ccc} s_{12} & s_2 & s_{11} \end{array}\right] \left[\begin{array}{c} {\dot x}(t) \\ y(t)-r \end{array}\right])\\ =\rho\, {\rm sgn}(\frac{1}{2}\Phi^{-1} \left[\begin{array}{ccc} m_2 & 1 & m_1 \end{array}\right] \left[\begin{array}{c} {\dot x}(t) \\ y(t)-r \end{array}\right])\\ =\rho\, {\rm sgn}(-\underbrace{\frac{1}{2}(-\Phi^{-1}) \left[\begin{array}{cc} m_2 & 1 \end{array}\right] }_{G}{\dot x}(t)+\underbrace{\frac{1}{2}m_1(-\Phi^{-1})}_{G_I} (r-y(t)))\\ \Rightarrow u_n(t)=\rho\,\int_0^t\underbrace{{\rm sgn}(-G{\dot x}(\tau)+G_I(r-y(\tau)))}_{0,\pm 1}d\tau \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-fb6f2c2d66db55b55c3690dbc77615f3_l3.png "Rendered by QuickLaTeX.com")
 , の場合のシミュレーション結果を次に示します。
, の場合のシミュレーション結果を次に示します。
演習…Flipped Classroom
| MATLAB |
|
| SCILAB |
|