|
【本章のねらい】 ・ 状態オブザーバを構成する。 ・ 可観測性と可検出性を判定する。 |
4.1 状態オブザーバ
いま制御対象は平衡状態にあるとし,何らかの要因でこれが乱されたとき,速やかに元の平衡状態に戻す手段として, 入力 入力 出力 出力 次元線形系(次系) 次元線形系(次系)
に対する状態フィードバック
を考えた。しかしながら,現実には状態変数をすべて計測できる場合は少ない。したがって,状態フィードバックは実際には実施できるとは限らない。そこで,状態オブザーバとよばれる
が考案されている。ここで,サイズ
実際,(4.3)から(4.1)の第1式を辺々引き算すると
ここで,行列
となって, 一つのアプローチは,つぎの仮想的な
を安定化する状態フィードバック
を求めることである。実際,閉ループ系は
となって,行列 したがって,前章の状態フィードバックの設計法をそのまま援用できるが,実際には次章のLQG制御問題として解く場合が多い。 例題4.1 2次系
に対する状態オブザーバ
行列
これらから,オブザーバゲイン
したがって,求める状態オブザーバ
演習4.1 2次系
に対する状態オブザーバ 例題4.2 例題4.1において, %obs_err.m 演習4.2 演習4.1において, さて,
のように実施するとき,オブザーバベースト・コントローラは
となる。このとき,閉ループ系はつぎのように表される(
このように閉ループ系の 例題4.3 1次系
に対する状態フィードバック
と,状態オブザーバ
を考える。このときオブザーバベースト・コントローラ
による閉ループ系の
すなわち
で表される。この行列
より, 演習4.2 例題4.3において, |



 の行列
の行列 が設計パラメータである。このブロック線図をつぎに示す。
が設計パラメータである。このブロック線図をつぎに示す。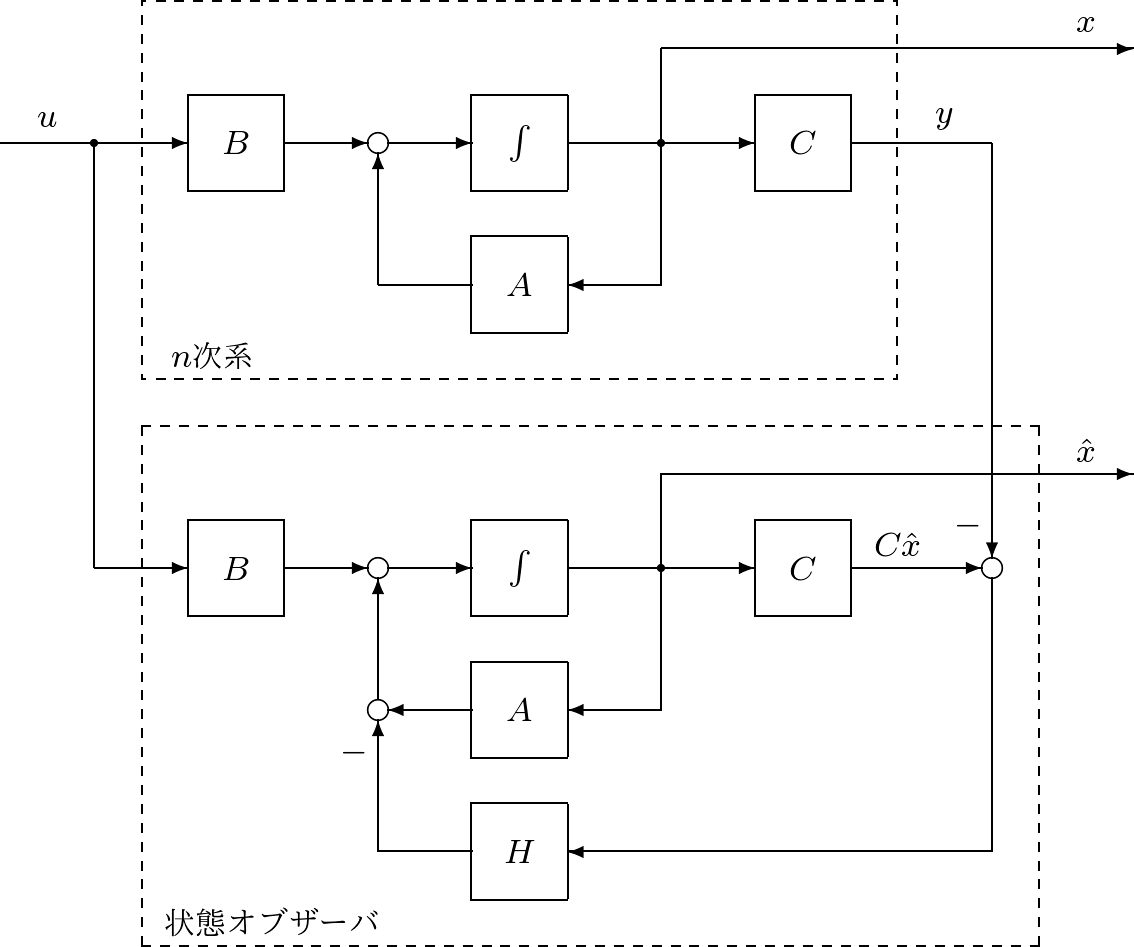

 が安定行列であれば
が安定行列であれば
 が
が に漸近していく。したがって,行列
に漸近していく。したがって,行列


 を安定行列,よって行列
を安定行列,よって行列![\displaystyle{ \left\{\begin{array}{l} \underbrace{ \left[\begin{array}{c} \dot{x}_1(t) \\ \dot{x}_2(t) \\ \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 0 & 0 \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} {x}_1(t) \\ {x}_2(t) \\ \end{array}\right] }_{x(t)}+ \underbrace{ \left[\begin{array}{cc} 0 \\ 1 \end{array}\right] }_{B} u(t)\\ y(t)= \underbrace{ \left[\begin{array}{cc} 1 & 0 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} {x}_1(t) \\ {x}_2(t) \\ \end{array}\right] }_{x(t)} \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b4716f40d1006ce97470291edbcab935_l3.png "Rendered by QuickLaTeX.com")
 を,行列
を,行列 となるように構成せよ。
となるように構成せよ。![\displaystyle{ {\rm det}(\lambda I_2-A)= {\rm det}\left[\begin{array}{cc} \lambda & -1 \\ 0 & \lambda \end{array}\right] =\lambda^2+\underbrace{0}_{a_1}\lambda+\underbrace{0}_{a_2} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4a8163de84bd0261dff1fa933592b34c_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{ H^T= \left[\begin{array}{cc} 2-0 & 3-0 \end{array}\right] \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right]^{-1} \left[\begin{array}{cc} 1 & 0 \\ 0 & 1 \end{array}\right]^{-1} =\left[\begin{array}{cc} 3 & 2 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6955c301dfc8b6f221475d10db81ad1e_l3.png "Rendered by QuickLaTeX.com")
 は
は![\displaystyle{ \left[\begin{array}{c} \dot{\hat{x}}_1 \\ \dot{\hat{x}}_2 \end{array}\right] = ( \left[\begin{array}{cc} 0 & 1 \\ 0 & 0 \end{array}\right]- \left[\begin{array}{c} 3 \\ 2 \end{array}\right] \left[\begin{array}{cc} 1 & 0 \end{array}\right] ) \left[\begin{array}{c} \hat{x}_1 \\ \hat{x}_2 \end{array}\right] + \left[\begin{array}{c} 3 \\ 2 \end{array}\right] y + \left[\begin{array}{c} 0 \\ 1 \end{array}\right] u }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-500ca8889452ea70516399f0d4455007_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ = \left[\begin{array}{cc} -3 & 1 \\ -2 & 0 \end{array}\right] \left[\begin{array}{c} \hat{x}_1 \\ \hat{x}_2 \end{array}\right] + \left[\begin{array}{c} 3 \\ 2 \end{array}\right] y + \left[\begin{array}{c} 0 \\ 1 \end{array}\right] u }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7220cbd6ca0188d72056036f6629a124_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left\{\begin{array}{l} \underbrace{ \left[\begin{array}{c} \dot{x}_1(t) \\ \dot{x}_2(t) \\ \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 0 & 0 \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} {x}_1(t) \\ {x}_2(t) \\ \end{array}\right] }_{x(t)}+ \underbrace{ \left[\begin{array}{cc} 0 \\ 1 \end{array}\right] }_{B} u(t)\\ y(t)= \underbrace{ \left[\begin{array}{cc} 1 & 1 \end{array}\right] }_{C} \underbrace{ \left[\begin{array}{c} {x}_1(t) \\ {x}_2(t) \\ \end{array}\right] }_{x(t)} \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-cb616bd20ad3679652dda6f9def23eb8_l3.png "Rendered by QuickLaTeX.com")
 となるように構成せよ。
となるように構成せよ。 のときの零入力応答
のときの零入力応答 を,状態オブザーバの出力
を,状態オブザーバの出力 が追従する様子をMATLABでシミュレーションせよ。
が追従する様子をMATLABでシミュレーションせよ。 と
と を重ねて描くためのMファイルは,たとえばつぎのように書ける。
を重ねて描くためのMファイルは,たとえばつぎのように書ける。

 )。
)。![\displaystyle{(4.11)\quad \left[\begin{array}{c} \dot{x}(t) \\ \dot{e}(t) \end{array}\right]= \left[\begin{array}{ccc} A-BF & -BF \\ 0 & A-HC \end{array}\right] \left[\begin{array}{c} x(t) \\ e(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b5df41d6cb0eadc1627ced5f60b162c8_l3.png "Rendered by QuickLaTeX.com")
 の固有値の集合と状態オブザーバによる
の固有値の集合と状態オブザーバによる




![\displaystyle{ \left[\begin{array}{c} \dot{x}(t)\\ \dot{\hat{x}}(t) \end{array}\right] = \underbrace{ \left[\begin{array}{cc} a & -bf \\ hc & a-hc-bf \end{array}\right] }_{A_F} \left[\begin{array}{c} {x}(t)\\ {\hat{x}}(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7399b50c26a8ee8f72f43f1c373710a1_l3.png "Rendered by QuickLaTeX.com")
 の固有値を求めると
の固有値を求めると![\displaystyle{ \begin{array}{lll} &&{\rm det}(\lambda I_2-A_F) ={\rm det} \left[\begin{array}{cc} \lambda-a & bf \\ -hc & \lambda-a+hc+bf \end{array}\right]\\ &&=(\lambda-a)(\lambda-a+hc+bf)+bfhc\\ &&=\lambda^2-(a-bf+a-hc)\lambda+(a-bf)(a-hc)\\ &&=(\lambda-(a-bf))(\lambda-(a-hc))=0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-773a683e5ed9d01a0b5fb9fed4d9fa15_l3.png "Rendered by QuickLaTeX.com")
 と
と となる。
となる。 のとき,状態フィードバックによる閉ループ系とオブザーバベースト・コントローラによる閉ループ系の応答を比較したい。
のとき,状態フィードバックによる閉ループ系とオブザーバベースト・コントローラによる閉ループ系の応答を比較したい。 と
と の場合について,それらの応答をMATLABでシミュレーションせよ。
の場合について,それらの応答をMATLABでシミュレーションせよ。4.2 可観測性と可検出性
|
どのような次系に対しても状態オブザーバが求まるわけではない。状態オブザーバが構成可能な条件を可検出性という。また,可検出性の十分条件である可観測性の条件も知られている。これらの定義と等価な条件をまとめてお(テキスト「線形システム制御入門」の 定理4.1,定理4.2参照)。
【可検出性の定義とその等価な条件】 定義D0: 状態オブザーバを構成可能 これらの条件の一つが成り立つとき 【可観測性の定義とその等価な条件】 定義O0: 任意有限時間の入力と出力から,初期状態を一意に決定可能 これらの条件の一つが成り立つとき 例題4.4 つぎの
(2) 可観測性行列は, (3) 可観測性行列は, 演習4.4 例題4.4における可観測性の判定を, |
![{\rm rank}\, \left[\begin{array}{c} C \\ A-\lambda I_n \end{array}\right]=n](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-07453f8f51e03541641efaea4dfadc27_l3.png "Rendered by QuickLaTeX.com") (
( は
は (
( は可検出対という。
は可検出対という。
![{\rm rank}\, \underbrace{ \left[\begin{array}{c} C \\ CA \\ \vdots\\ CA^{n-1} \end{array}\right] }_{observability\ matrix} =n](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6253173de124e69f731cff9f00238073_l3.png "Rendered by QuickLaTeX.com")
![{\rm rank} \left[\begin{array}{c} C \\ A-\lambda I_n \end{array}\right]=n](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a70b35808fe935cd4119ae5553029932_l3.png "Rendered by QuickLaTeX.com") (
( は可制御対
は可制御対 行列をもつ2次系
行列をもつ2次系 の可観測性を,可観測性行列の階数を求めて判定せよ。
の可観測性を,可観測性行列の階数を求めて判定せよ。![\displaystyle{ (1)\quad A= \left[\begin{array}{cc} 0 & 1 \\ 0 & 0 \end{array}\right] ,\ C= \left[\begin{array}{cc} 1 & 0 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0fd87a2085652131cbc772c1209d0595_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ (2)\quad A= \left[\begin{array}{cc} 0 & 1 \\ 0 & 0 \end{array}\right] ,\ C= \left[\begin{array}{cc} 0 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f38a93f180054bd61e7daab9b56a090f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ (3)\quad A= \left[\begin{array}{cc} 0 & 1 \\ 0 & -1 \end{array}\right] ,\ C= \left[\begin{array}{cc} 1 & 1 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a8d623c1c1f322562ab800983793756a_l3.png "Rendered by QuickLaTeX.com")
![\left[\begin{array}{c} C \\ CA \end{array}\right]= \left[\begin{array}{cc} 1 & 0 \\ 0 & 1 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-86a1672645eaaf3610ad7d0583028dde_l3.png "Rendered by QuickLaTeX.com") 。この階数は2で,システムの次数2と等しい。したがって,この2次系は可観測である。
。この階数は2で,システムの次数2と等しい。したがって,この2次系は可観測である。![\left[\begin{array}{c} C \\ CA \end{array}\right]= \left[\begin{array}{cc} 0 & 1 \\ 0 & 0 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7b01819184460463e124a6f0c771c824_l3.png "Rendered by QuickLaTeX.com") 。この階数は1で,システムの次数2と等しくない。したがって,この2次系は可観測でない。
。この階数は1で,システムの次数2と等しくない。したがって,この2次系は可観測でない。![\left[\begin{array}{c} C \\ CA \end{array}\right]= \left[\begin{array}{cc} 1 & 1 \\ 0 & 0 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6d920c3b90dc526154220a51e255b56e_l3.png "Rendered by QuickLaTeX.com") 。この階数は1で,システムの次数2と等しくない。したがって,この2次系は可観測でない。
。この階数は1で,システムの次数2と等しくない。したがって,この2次系は可観測でない。4.3 状態オブザーバの低次元化
これまで,状態オブザーバの出力 に状態フィードバックのゲイン行列 に状態フィードバックのゲイン行列 をかけてオブザーバベースト・コントローラを構成した。しかしながら,最終的に必要なのは,状態 をかけてオブザーバベースト・コントローラを構成した。しかしながら,最終的に必要なのは,状態 の推定値ではなく,その線形関数 の推定値ではなく,その線形関数 の推定値であることから,線形関数オブザーバ の推定値であることから,線形関数オブザーバ
が考案されている。ここで,サイズ
を満足させることができれば
が成り立ち,これから
したがって
を得る(テキスト「線形システム制御入門」の 4.3節参照)。特に, 例題4.5 1入力
に対して,
ここで,
と選べば,次式が成り立つ。
演習4.5 例題4.1の2次系に対する恒等関数オブザーバを,その固有値が 例題4.6 例題4.5の1入力
を推定する線形関数オブザーバの一つは,つぎに
ただし,
と選べば,次式が成り立つ。
演習4.6 例題4.1の2次系に対して,状態フィードバック |

 の適当な行列
の適当な行列 を用いて
を用いて



 の場合は恒等関数オブザーバと呼ばれる。線形関数オブザーバを使用する利点は,状態オブザーバ(4.3)の次元数は制御対象の次元数
の場合は恒等関数オブザーバと呼ばれる。線形関数オブザーバを使用する利点は,状態オブザーバ(4.3)の次元数は制御対象の次元数 次系
次系![\displaystyle{ \left\{\begin{array}{l} \underbrace{ \left[\begin{array}{c} \dot{y}(t) \\ \ddot{y}(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{cc} 0 & I_p \\ A_{21} & A_{22} \end{array}\right] }_A \underbrace{ \left[\begin{array}{c} y(t) \\ \dot{y}(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{cc} 0 \\ B_2 \end{array}\right] }_B u(t) \\ y(t)= \underbrace{ \left[\begin{array}{cc} I_p & 0 \end{array}\right] }_C \underbrace{ \left[\begin{array}{c} y(t) \\ \dot{y}(t) \end{array}\right] }_{x(t)} \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-dd502a7f8d2f5cdb3309be9babf3c735_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \left\{\begin{array}{l} \dot{\hat{x}}(t)= \underbrace{(A_{22}-L)}_{\hat{A}}\hat{x}(t) +\underbrace{(A_{21}+(A_{22}-L)L)}_{\hat{B}}y(t) +\underbrace{B_{2}}_{\hat{J}}u(t)\\ z(t)= \underbrace{ \left[\begin{array}{c} 0 \\ I_p \end{array}\right] }_{\hat{C}} \hat{x}(t) + \underbrace{ \left[\begin{array}{c} I_p \\ L \end{array}\right] }_{\hat{D}} y(t) \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d2e714a3407b24c35a02e8bde698f9a0_l3.png "Rendered by QuickLaTeX.com")
 は
は を安定行列とするサイズ
を安定行列とするサイズ の適当な行列である。
の適当な行列である。 であり,条件(??)の第2式と第4式が満足されることを示せばよい。実際,
であり,条件(??)の第2式と第4式が満足されることを示せばよい。実際,![\displaystyle{ U= \left[\begin{array}{cc} -L & I_p \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f081ec5cf81255243a0490e1f6f94488_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \underbrace{ \left[\begin{array}{cc} A_{21} & A_{22}-L \\ I_p & 0\\ 0 & I_p \end{array}\right] }_{ \left[\begin{array}{cc} UA \\ I_{2p} \end{array}\right]} = \underbrace{ \left[\begin{array}{cc} A_{22}-L & A_{21}+(A_{22}-L)L\\ 0 & I_p\\ I_p & L \end{array}\right] }_{ \left[\begin{array}{cc} \hat{A} & \hat{B} \\ \hat{C} & \hat{D} \end{array}\right]} \underbrace{ \left[\begin{array}{cc} -L & I_p \\ I_p & 0 \end{array}\right] }_{ \left[\begin{array}{cc} U \\ C \end{array}\right]} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4437dc03385f40f22d80730c9970d4e5_l3.png "Rendered by QuickLaTeX.com")
 となるように求めよ。この恒等オブザーバに対して例題4.2と同様のシミュレーションを行え。
となるように求めよ。この恒等オブザーバに対して例題4.2と同様のシミュレーションを行え。![\displaystyle{ u(t)= \underbrace{ \left[\begin{array}{cc} K_1 & K_2 \end{array}\right] }_K \underbrace{ \left[\begin{array}{c} y(t) \\ \dot{y}(t) \end{array}\right] }_{x(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-38415ee373992f2396ca53180700b8cb_l3.png "Rendered by QuickLaTeX.com")
 入力
入力 出力{\bf 1次系}として与えられることを示せ。
出力{\bf 1次系}として与えられることを示せ。
 と定める。
と定める。![\displaystyle{ U=K_2 \left[\begin{array}{cc} -L & I_p \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3637798c4458d7dfbdf47fe50a4de3ff_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \underbrace{ \left[\begin{array}{cc} K_2A_{21} & K_2(A_{22}-L) \\ K_1 & K_2 \end{array}\right] }_{ \left[\begin{array}{cc} UA \\ K \end{array}\right]} = \underbrace{ \left[\begin{array}{cc} \lambda & K_2(A_{21}+\lambda L) \\ 1 & K_1+K_2L \end{array}\right] }_{ \left[\begin{array}{cc} \hat{A} & \hat{B} \\ \hat{C} & \hat{D} \end{array}\right]} \underbrace{ \left[\begin{array}{cc} -K_2L & K_2 \\ I_p & 0 \end{array}\right] }_{ \left[\begin{array}{cc} U \\ C \end{array}\right]} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-af379103f3c6d8408714f762d43eaae9_l3.png "Rendered by QuickLaTeX.com")
 を考える。このとき,この状態フィードバックを実施する1次元線形関数オブザーバを,その固有値が
を考える。このとき,この状態フィードバックを実施する1次元線形関数オブザーバを,その固有値が を追跡するシミュレーションを行え。
を追跡するシミュレーションを行え。演習問題の解答
【演習4.1】 行列 の特性多項式は の特性多項式は
行列
したがって,求める状態オブザーバ
【演習4.2】 %obs_err2.m 【演習4.3】 %observer_based_controller.m 【演習4.4】
したがって,この2次系は可観測である。 (2)
したがって,この2次系は可観測ではない。 (3)
したがって,この2次系は可観測ではない。 【演習4.5】
ただし, %obs_err3.m 【演習4.6】
ただし, %obs_err4.m |
![{\rm det}(\lambda I_2-A)= {\rm det}\left[\begin{array}{cc} \lambda & -1 \\ 0 & \lambda \end{array}\right] =\lambda^2+\underbrace{0}_{a_1}\lambda+\underbrace{0}_{a_2}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-683fa53a06a69cdf8560c0f6dd23d977_l3.png "Rendered by QuickLaTeX.com")
 \\
\\![H^T= \left[\begin{array}{cc} 4-0 & 4-0 \end{array}\right] \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right]^{-1} \left[\begin{array}{cc} 1 & 0 \\ 1 & 1 \end{array}\right]^{-1} =\left[\begin{array}{cc} 0 & 4 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-51cb46bdaabbcac9e4fc01bbf67ab7ac_l3.png "Rendered by QuickLaTeX.com")
![\left[\begin{array}{c} \dot{\hat{x}}_1 \\ \dot{\hat{x}}_2 \end{array}\right] = \left[\begin{array}{cc} 0 & 1 \\ -4 & -4 \end{array}\right] \left[\begin{array}{c} \hat{x}_1 \\ \hat{x}_2 \end{array}\right] + \left[\begin{array}{c} 0 \\ 4 \end{array}\right] y + \left[\begin{array}{c} 0 \\ 1 \end{array}\right] u](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-56d695c3fb29f73fd926332f9bf60bbe_l3.png "Rendered by QuickLaTeX.com")
 。
。![{\rm rank}\, \left[\begin{array}{c} C \\ A-\lambda_i I_2 \end{array}\right]= {\rm rank} \left[\begin{array}{ccc} 1 & 0 \\ 0 & 1 \\ 0 & 0 \end{array}\right]= 2\ \ (i=1,2)](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-30cd66cd7df59213c8b0268c2be8051e_l3.png "Rendered by QuickLaTeX.com")
![{\rm rank}\, \left[\begin{array}{c} C \\ A-\lambda_i I_2 \end{array}\right]= {\rm rank} \left[\begin{array}{ccc} 0 & 1 \\ 0 & 1 \\ 0 & 0 \end{array}\right]= 1\ \ (i=1,2)](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3ebec8ef15f1eec0c91cca84d38ca025_l3.png "Rendered by QuickLaTeX.com")
 。
。![{\rm rank}\, \left[\begin{array}{c} C \\ A-\lambda_1 I_2 \end{array}\right]= {\rm rank} \left[\begin{array}{ccc} 1 & 1 \\ 0 & 1 \\ 0 & -1 \end{array}\right]= 2](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-eeba5efd60e4377e2987397eae0f3d4a_l3.png "Rendered by QuickLaTeX.com")
![{\rm rank}\, \left[\begin{array}{c} C \\ A-\lambda_2 I_2 \end{array}\right]= {\rm rank} \left[\begin{array}{ccc} 1 & 1 \\ -1 & 1 \\ 0 & 0 \end{array}\right]= 1](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-062a4b6b19aa5147e9e189c402950ecf_l3.png "Rendered by QuickLaTeX.com")
 ,
, だから,例題
だから,例題![\left\{\begin{array}{l} \dot{\hat{x}}(t)= \underbrace{-L}_{A_{22}-L} \hat{x}(t) \underbrace{-L^2}_{A_{21}+(A_{22}-L)L} y(t)+ \underbrace{1}_{B_{2}} u(t)\\ z(t)= \left[\begin{array}{c} 0 \\ 1 \end{array}\right] \hat{x}(t) + \left[\begin{array}{c} 1 \\ L \end{array}\right] y(t) \end{array}\right.](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d477eebdabe870a1925aa162c9c0ac2f_l3.png "Rendered by QuickLaTeX.com")
 。また,恒等オブザーバの出力
。また,恒等オブザーバの出力 ,
, だから,例題
だから,例題
 。また,関数オブザーバの出力
。また,関数オブザーバの出力 が状態フィードバック
が状態フィードバック