|
【本章のねらい】 ・ 状態フィードバックを設計する。 ・ 可制御性と可安定性を判定する。 |
3.1 状態フィードバック
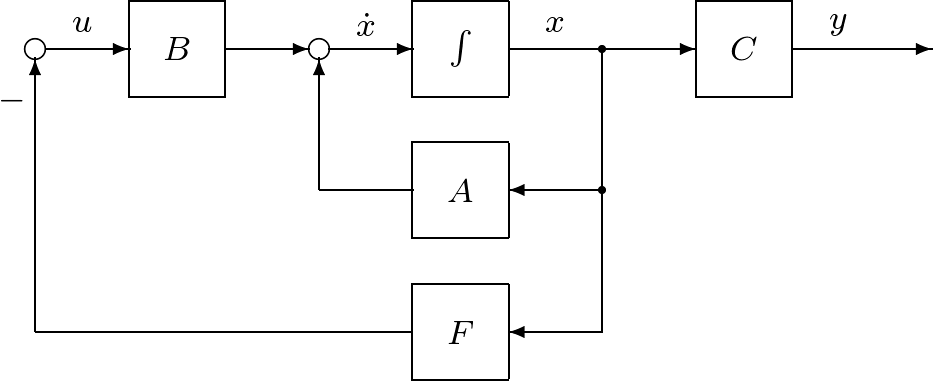
いま制御対象は平衡状態にあるとし,何らかの要因でこれが乱されたとき,適当な手段を用いて,速やかに元の平衡状態に戻したい。そのような手段の一つとして, 入力 入力 出力 出力 次元線形系(次系) 次元線形系(次系)
に対する状態フィードバック
を考える。このとき,(3.2)式を(3.1)式に代入して,閉ループ系
を得る。このブロック線図を次に示す。
上の制御目的が達成されるためには,閉ループ系の (3.4)「任意の が成り立ち,これは平衡状態 まず,1次系の状態フィードバックの例を考える。 例題3.1 時定数
に対して,新しい入力
を行うと閉ループ系の時定数は
となる。これは時定数 演習3.1 1次系 演習3.2 例題2.5で得た図上( つぎに,2次系の状態フィードバックの例を考える。 例題3.2 減衰係数
に対して,新しい入力
を行うと,閉ループ系の減衰係数は
これは減衰係数 演習3.3 例題2.6で得た図上( さて,
また,行列
このとき,閉ループ系の
または
で与えられる(テキスト「線形システム制御入門」の3.3節参照)。(3.8})式と(3.9})式を比較すると,前者は 例題3.3 2次系
に対する状態フィードバック
(1) 行列
したがって,ゲイン行列
(2) 行列
したがって,ゲイン行列
演習3.4 つぎの2次系に対する状態フィードバック (2) 最後に多入力をもつ
ここで
とおくと
これから,
ただし, 例題3.4 2入力2次系
に対するつぎの状態フィードバックによる閉ループ系おける行列 (1) (2)
この特性多項式は
したがって,行列 (2) 閉ループ系の
この特性多項式は
したがって,行列 演習3.5 例題3.4の2つの状態フィードバックは,公式(3.13})において (1) (2) と指定して得られることを,MATLABを用いて確かめよ。 |



 行列,すなわち,行列
行列,すなわち,行列 が安定行列となるように,状態フィードバックのゲイン行列
が安定行列となるように,状態フィードバックのゲイン行列 を決めればよい。実際,
を決めればよい。実際, に対して,
に対して, 」
」 に戻ることを意味するからである。
に戻ることを意味するからである。 と定常ゲイン
と定常ゲイン をもつ1次系
をもつ1次系
 をもつ状態フィードバック
をもつ状態フィードバック
 ,定常ゲインは
,定常ゲインは となることを示せ。
となることを示せ。 に代入すると,閉ループ系は
に代入すると,閉ループ系は
 に対するフィードバック
に対するフィードバック を,閉ループ系の時定数が
を,閉ループ系の時定数が ,定常ゲインが
,定常ゲインが となるように
となるように –
– 平面)に,望ましい閉ループ系の時定数
平面)に,望ましい閉ループ系の時定数 を指定し,
を指定し, と固有角周波数
と固有角周波数 をもつ2次系
をもつ2次系![\displaystyle{ \underbrace{ \left[\begin{array}{c} \dot{x}_1(t) \\ \dot{x}_2(t) \end{array}\right] }_{\dot x} = \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} x_1(t) \\ x_2(t) \end{array}\right] }_{x} + \underbrace{ \left[\begin{array}{c} 0 \\ \omega_n^2 \end{array}\right] }_{B} u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5932569bcea6f83e90d462d598332ff4_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ u(t)=- \underbrace{ \left[\begin{array}{cc} \frac{1}{\omega_n^2}(\omega_n'\,^2-\omega_n^2) & \frac{2}{\omega_n^2}(\zeta'\omega_n'-\zeta\omega_n) \end{array}\right] }_{F} \left[\begin{array}{c} x_1(t) \\ x_2(t) \end{array}\right] +\underbrace{\frac{\omega_n'\,^2}{\omega_n^2}}_Gv(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-265415e99e8b4aed32c5f7a8ce5fbc90_l3.png "Rendered by QuickLaTeX.com")
 と固有角周波数は
と固有角周波数は となることを示せ。
となることを示せ。 を状態方程式
を状態方程式 に代入すると,閉ループ系は
に代入すると,閉ループ系は となる。ここで
となる。ここで![\displaystyle{ \begin{array}{lll} &&A-BF= \left[\begin{array}{cc} 0 & 1 \\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] - \left[\begin{array}{c} 0 \\ \omega_n^2 \end{array}\right]\\ && \times \left[\begin{array}{cc} \frac{1}{\omega_n^2}(\omega_n'\,^2-\omega_n^2) & \frac{2}{\omega_n^2}(\zeta'\omega_n'-\zeta\omega_n) \end{array}\right] =\left[\begin{array}{cc} 0 & 1 \\ -\omega_n'\,^2 & -2\zeta'\omega_n' \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f0d26f2790cc8788d788deb679fa2869_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ BG= \left[\begin{array}{c} 0 \\ \omega_n^2 \end{array}\right] \frac{\omega_n'\,^2}{\omega_n^2} = \left[\begin{array}{c} 0 \\ \omega_n'\,^2 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7f35f4d16026f52b2f63beea98058d98_l3.png "Rendered by QuickLaTeX.com")
 平面)に,望ましい第1番目のオーバーシュートの頂点の座標
平面)に,望ましい第1番目のオーバーシュートの頂点の座標 を指定し,
を指定し, を定めよ。
を定めよ。![\displaystyle{(3.5)\quad {\rm rank} \underbrace{ \left[\begin{array}{cccc} B & AB & \cdots & A^{n-1}B \end{array}\right] }_{controllability\ matrix} =n }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2f16ce18f7ac6a364ad9aba07685b74e_l3.png "Rendered by QuickLaTeX.com")
 ,行列
,行列 とするとき,,それぞれの特性多項式を次式で表す。
とするとき,,それぞれの特性多項式を次式で表す。

![\displaystyle{(3.8)\quad \begin{array}{lll} F&=&\left[\begin{array}{cccc} a_n'-a_n & \cdots & a_2'-a_2 & a_1'-a_1 \end{array}\right] \nonumber\\ &\times& \left[\begin{array}{ccccc} a_{n-1} & a_{n-2} & \cdots & a_1 & 1 \\ a_{n-2} & a_{n-3} & \cdots & 1 & 0 \\ \vdots & \vdots & \cdots & \vdots & \vdots \\ a_2 & a_1 & \cdots & 0 & 0 \\ a_1 & 1 & \cdots & 0 & 0 \\ 1 & 0 & \cdots & 0 & 0 \end{array}\right]^{-1} \nonumber\\ &\times& \left[\begin{array}{cccc} B & AB &\cdots & A^{n-1}B \end{array}\right]^{-1} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-76067715bdbc7d9b8029b271b91a27de_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(3.9)\quad \begin{array}{lll} F&=& \left[\begin{array}{cccc} 1 & 0 & \cdots & 0 \end{array}\right] % \nonumber\\ % &\times& \left[\begin{array}{cccc} B & AB &\cdots & A^{n-1}B \end{array}\right]^{-1} \nonumber\\ &\times& (A^n+a'_1A^{n-1}+\cdots+a'_nI_n) \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-af6df997326869cc30287b3fe5202448_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \underbrace{ \left[\begin{array}{c} \dot{x}_1(t) \\ \dot{x}_2(t) \\ \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 0 & 0 \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} {x}_1(t) \\ {x}_2(t) \\ \end{array}\right] }_{{x}(t)}+ \underbrace{ \left[\begin{array}{c} 0 \\ 1 \end{array}\right] }_{B} u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f8bc98dd7c81e82779b6017dbc6cb85e_l3.png "Rendered by QuickLaTeX.com")
 を,行列
を,行列 の固有値が,つぎのものとなるように求めよ。
の固有値が,つぎのものとなるように求めよ。

![\displaystyle{ {\rm det}(\lambda I_2-A)= {\rm det}\left[\begin{array}{cc} \lambda & -1 \\ 0 & \lambda \end{array}\right] =\lambda^2+\underbrace{0}_{a_1}\lambda+\underbrace{0}_{a_2} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4a8163de84bd0261dff1fa933592b34c_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{ F= \left[\begin{array}{cc} 2-0 & 3-0 \end{array}\right] \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right]^{-1} \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right]^{-1} =\left[\begin{array}{cc} 2 & 3 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-00d3a60b845aa2c61131a0a8ac455fe5_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{ F= \left[\begin{array}{cc} 2-0 & 2-0 \end{array}\right] \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right]^{-1} \left[\begin{array}{cc} 0 & 1 \\ 1 & -1 \end{array}\right]^{-1} =\left[\begin{array}{cc} 2 & 2 \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-55e7e32ab3b3e7824b918a085d4621b8_l3.png "Rendered by QuickLaTeX.com")
 となるように求めよ。
となるように求めよ。![\underbrace{ \left[\begin{array}{c} \dot{x}_1(t) \\ \dot{x}_2(t) \\ \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 0 & -1 \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} {x}_1(t) \\ {x}_2(t) \\ \end{array}\right] }_{{x}(t)}+ \underbrace{ \left[\begin{array}{c} 0 \\ 1 \end{array}\right] }_{B} u(t)](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9040963fdd9acf7b39f1bf812fa99c88_l3.png "Rendered by QuickLaTeX.com")
![\underbrace{ \left[\begin{array}{c} \dot{x}_1(t) \\ \dot{x}_2(t) \\ \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -1 & 0 \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} {x}_1(t) \\ {x}_2(t) \\ \end{array}\right] }_{{x}(t)}+ \underbrace{ \left[\begin{array}{c} 0 \\ 1 \end{array}\right] }_{B} u(t)](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f5aff16fd9935d4b51dc9dea0f54e64b_l3.png "Rendered by QuickLaTeX.com")
 に対応する固有ベクトルを
に対応する固有ベクトルを とするとき,次式が成り立つ。
とするとき,次式が成り立つ。


![\displaystyle{(3.13)\quad \begin{array}{lll} F&=& \left[\begin{array}{cccc} g_1 & \cdots & g_n \end{array}\right] \nonumber\\ &\times& \left[\begin{array}{cccc} (A-\lambda_1'I_n)^{-1}Bg_1 &\cdots & (A-\lambda_n'I_n)^{-1}Bg_n \end{array}\right]^{-1} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1c54c896c8280274738a399fd61939de_l3.png "Rendered by QuickLaTeX.com")
 は,上の逆行列が存在する範囲で適切に指定するものとする。これから,多入力系の場合,状態フィードバックは,固有値を指定しただけでは,一意に定まらないことがわかる。
は,上の逆行列が存在する範囲で適切に指定するものとする。これから,多入力系の場合,状態フィードバックは,固有値を指定しただけでは,一意に定まらないことがわかる。![\displaystyle{ \underbrace{ \left[\begin{array}{c} \dot{x}_1(t) \\ \dot{x}_2(t) \\ \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 0 \\ 0 & -1 \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} {x}_1(t) \\ {x}_2(t) \\ \end{array}\right] }_{{x}(t)}+ \underbrace{ \left[\begin{array}{cc} 1 & 1 \\ 1 & -1 \end{array}\right] }_{B} u(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5b7a0db163b44996055239c4cf8ec6aa_l3.png "Rendered by QuickLaTeX.com")
![u(t)=- \underbrace{ \left[\begin{array}{cc} 1 & 1 \\ 1 & -1 \end{array}\right] }_{F} \underbrace{ \left[\begin{array}{c} {x}_1(t) \\ {x}_2(t) \\ \end{array}\right] }_{{x}(t)}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8a1880804ad575edaa4ce349005ec561_l3.png "Rendered by QuickLaTeX.com")
![u(t)=- \underbrace{ \left[\begin{array}{cc} 1 & 0 \\ 1 & -2 \end{array}\right] }_{F} \underbrace{ \left[\begin{array}{c} {x}_1(t) \\ {x}_2(t) \\ \end{array}\right] }_{{x}(t)}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d7681a2997f575f972ebd16c2a6cf272_l3.png "Rendered by QuickLaTeX.com")
![A-BF=\left[\begin{array}{cc} 0 & 0 \\ 0 & -1 \end{array}\right] - \left[\begin{array}{cc} 1 & 1 \\ 1 & -1 \end{array}\right] \left[\begin{array}{cc} 1 & 1 \\ 1 & -1 \end{array}\right] = \left[\begin{array}{cc} -2 & 0 \\ 0 & -3 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7f2963cef10e44b60c3affcbf361adbe_l3.png "Rendered by QuickLaTeX.com")
![{\rm det}( \lambda I_2- \left[\begin{array}{cc} -2 & 0 \\ 0 & -3 \end{array}\right] ) ={\rm det} \left[\begin{array}{cc} \lambda+2 & 0 \\ 0 & \lambda+3 \end{array}\right]=(\lambda+2)(\lambda+3)](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6c6aa0b1dfa7d868369a9644be28a05e_l3.png "Rendered by QuickLaTeX.com")
 。
。![A-BF=\left[\begin{array}{cc} 0 & 0 \\ 0 & -1 \end{array}\right] - \left[\begin{array}{cc} 1 & 1 \\ 1 & -1 \end{array}\right] \left[\begin{array}{cc} 1 & 0 \\ 1 & -2 \end{array}\right] = \left[\begin{array}{cc} -2 & 2 \\ 0 & -3 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d449e36991cd635bd50cb1c780ffb0a2_l3.png "Rendered by QuickLaTeX.com")
![{\rm det}( \lambda I_2- \left[\begin{array}{cc} -2 & 2 \\ 0 & -3 \end{array}\right] ) ={\rm det} \left[\begin{array}{cc} \lambda+2 & -2 \\ 0 & \lambda+3 \end{array}\right]=(\lambda+2)(\lambda+3)](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2c20afc020e10ddb3ce7c8935b8a6cf5_l3.png "Rendered by QuickLaTeX.com")
![\left[\begin{array}{cc} g_1 & g_2 \end{array}\right]= \left[\begin{array}{cc} 1 & 1 \\ 1 & -1 \\ \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-63c036cc9975d2709b19ac2d1695755c_l3.png "Rendered by QuickLaTeX.com")
![\left[\begin{array}{cc} g_1 & g_2 \end{array}\right]= \left[\begin{array}{cc} 1 & 1 \\ 1 & 2 \\ \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0e1cb75b7cc26605ba8ac549e921e456_l3.png "Rendered by QuickLaTeX.com")
3.2 可制御性と可安定性
|
どのような次系に対しても,閉ループ系を安定化をする状態フィードバックが求まるわけではない。その条件を可安定性という。また,(3.6})は,可安定性の十分条件である可制御性の条件として知られている。これらの定義と等価な条件をまとめておく(テキスト「線形システム制御入門」の 定理3.5,定理3.6参照)。
【可安定性の定義とその等価な条件】 これらの条件の一つが成り立つとき 【可制御性の定義とその等価な条件】 これらの条件の一つが成り立つとき 例題3.5 つぎの (1) (2) (3) 解答 (2) 可制御性行列は, (3) 可制御性行列は, 演習3.6 つぎの (1) (2) MATLABを用いて可制御性を判定するには,たとえば例題3.5(3)の %controllability_check.m ここで,4行目の結果がすべて真であれば,可制御である。 演習3.7 上のコマンドを用いて演習3.6の 例題3.6 例題3.5の
したがって,この2次系は可安定である。 (2)
したがって,この2次系は可安定ではない。 (3)
したがって,この2次系は可安定である。 演習3.8 演習3.6の MATLABを用いて可安定性を判定するには,たとえば例題3.5(3)の %stabilizability_check.m 演習3.9 上のコマンドを用いて演習3.6の |
![{\rm rank}\, \left[\begin{array}{cc} B & A-\lambda I_n \end{array}\right] =n](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-dee3269841bf00dddf51d7c2a639251b_l3.png "Rendered by QuickLaTeX.com") (
( は
は (
( は可制御対という。
は可制御対という。
![{\rm rank}\, \underbrace{ \left[\begin{array}{cccc} B & AB & \cdots & A^{n-1}B \end{array}\right] }_{controllability\ matrix} =n](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e60ebed285388cc54263c5a5b0d2c68c_l3.png "Rendered by QuickLaTeX.com")
 行列をもつ2次系
行列をもつ2次系![A= \left[\begin{array}{cc} 0 & 1 \\ 0 & 0 \end{array}\right] ,\ B= \left[\begin{array}{c} 0 \\ 1 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-36222923a8c23e1304b686c207b2e45a_l3.png "Rendered by QuickLaTeX.com")
![A= \left[\begin{array}{cc} 0 & 1 \\ 0 & 0 \end{array}\right] ,\ B= \left[\begin{array}{c} 1 \\ 0 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-be3e06c9484096b13a464b42c637d263_l3.png "Rendered by QuickLaTeX.com")
![A= \left[\begin{array}{cc} 0 & 1 \\ 0 & -1 \end{array}\right] ,\ B= \left[\begin{array}{c} 0 \\ 1 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-398c10ae8436225bc073a08388cf43cb_l3.png "Rendered by QuickLaTeX.com")
![\left[\begin{array}{cc} B & AB \end{array}\right]= \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-57e0de77b021699eaab69db1bbe66c05_l3.png "Rendered by QuickLaTeX.com") である。この階数は2で,システムの次数2と等しい。したがって,この2次系は可制御である。
である。この階数は2で,システムの次数2と等しい。したがって,この2次系は可制御である。![\left[\begin{array}{cc} B & AB \end{array}\right]= \left[\begin{array}{cc} 1 & 0 \\ 0 & 0 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-bbae0785ce94fd75ec6b345a1fd35bc0_l3.png "Rendered by QuickLaTeX.com") である。この階数は1で,システムの次数2と等しくない。したがって,この2次系は可制御でない。
である。この階数は1で,システムの次数2と等しくない。したがって,この2次系は可制御でない。![\left[\begin{array}{cc} B & AB \end{array}\right]= \left[\begin{array}{cc} 0 & 1 \\ 1 & -1 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-28053ba8dcafd6870e03a48271b3977f_l3.png "Rendered by QuickLaTeX.com") である。この階数は2で,システムの次数2と等しい。したがって,この2次系は可制御である。
である。この階数は2で,システムの次数2と等しい。したがって,この2次系は可制御である。![A= \left[\begin{array}{ccc} 0 & 1 & 0 \\ 0 & -1 & 1 \\ 0 & 0 & -1 \end{array}\right] ,\ B= \left[\begin{array}{c} 0 \\ 1 \\ 0 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6cc304a4620ea5dad9c5361bc465956f_l3.png "Rendered by QuickLaTeX.com")
![A= \left[\begin{array}{ccc} 0 & 1 & 0 \\ -1 & -1 & 0 \\ 0 & 0 & 2 \end{array}\right] ,\ B= \left[\begin{array}{cc} 0 & 0 \\ 1 & -1 \\ 0 & 1 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f6830e3d13f543452788ce6893c98e2d_l3.png "Rendered by QuickLaTeX.com")
 。ともに不安定固有値。
。ともに不安定固有値。![{\rm rank} \left[\begin{array}{cc} B & A-\lambda_i I_2 \end{array}\right]= {\rm rank} \left[\begin{array}{ccc} 0 & 0 & 1 \\ 1 & 0 & 0 \end{array}\right]= 2\ \ (i=1,2)](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-24bba1b78556bd6131a04af06f16e16f_l3.png "Rendered by QuickLaTeX.com")
![{\rm rank} \left[\begin{array}{cc} B & A-\lambda_i I_2 \end{array}\right]= {\rm rank} \left[\begin{array}{ccc} 1 & 0 & 1 \\ 0 & 0 & 0 \end{array}\right]= 1\ \ (i=1,2)](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6d9627c0a3279d9247e573818392f0d2_l3.png "Rendered by QuickLaTeX.com")
 。
。 のみ不安定固有値。
のみ不安定固有値。![{\rm rank} \left[\begin{array}{cc} B & A-\lambda_1 I_2 \end{array}\right]= {\rm rank} \left[\begin{array}{ccc} 0 & 0 & 1 \\ 1 & 0 & -1 \end{array}\right]= 2](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c9b3556551eb74e50f7a598bd4c2c8cb_l3.png "Rendered by QuickLaTeX.com")
演習問題の解答
演習3.1  , , より, より, , , 。 。
演習3.2 たとえば,つぎのMファイルを実行すればよい。 %sf1.m 演習3.3 たとえば,つぎのMファイルを実行すればよい。 %sf2.m 演習3.4 行列
(1) したがって,ゲイン行列
(2)
したがって,ゲイン行列
演習3.5 たとえば,つぎのMファイルを実行すればよい。 %sf_minputs.m 演習3.6 (1) 可制御性行列は, (2) 可制御性行列は, 演習3.7 Mファイル{\tt controllability\_check.m}のデータ{\tt A,B}の定義を次のように書き換える。 (1) A=[0 1 0;0 -1 1;0 0 -1]; B=[0;1;0]; 演習3.8
したがって,この3次系は可安定である。 (2)
したがって,この3次系は可安定である。 演習3.9 Mファイル{\tt stabilizability\_check.m}のデータ{\tt A,B}の定義を,次のように書き換える。 (1) A=[0 1 0;0 -1 1;0 0 -1]; B=[0;1;0]; |

![{\rm det}(\lambda I_2-A)= {\rm det}\left[\begin{array}{cc} \lambda & -1 \\ 0 & \lambda+1 \end{array}\right] =\lambda(\lambda+1) =\lambda^2+\underbrace{1}_{a_1}\lambda+\underbrace{0}_{a_2}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-65acea39d75710f02f1e7c20e6043964_l3.png "Rendered by QuickLaTeX.com")
![F= \left[\begin{array}{cc} 1-0 & 2-1 \end{array}\right] \left[\begin{array}{cc} 1 & 1 \\ 1 & 0 \end{array}\right]^{-1} \left[\begin{array}{cc} 0 & 1 \\ 1 & -1 \end{array}\right]^{-1} =\left[\begin{array}{cc} 1 & 1 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-dcc4c47cc9c08989bcad3857db207aaa_l3.png "Rendered by QuickLaTeX.com")
![{\rm det}(\lambda I_2-A)= {\rm det}\left[\begin{array}{cc} \lambda & -1 \\ 1 & \lambda \end{array}\right] =\lambda^2+1 =\lambda^2+\underbrace{0}_{a_1}\lambda+\underbrace{1}_{a_2}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3d9ad5dbdcf90b601c9c329ce2b16c08_l3.png "Rendered by QuickLaTeX.com")
![F= \left[\begin{array}{cc} 1-1 & 2-0 \end{array}\right] \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right]^{-1} \left[\begin{array}{cc} 0 & 1 \\ 1 & 0 \end{array}\right]^{-1} =\left[\begin{array}{cc} 0 & 2 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4c03b7ec22e4cf4a471a49a7256736c9_l3.png "Rendered by QuickLaTeX.com")
![\left[\begin{array}{ccc} B & AB & A^2B \end{array}\right]= \left[\begin{array}{ccc} 0 & 1 & -1 \\ 1 & -1 & 1 \\ 0 & 0 & 0 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-067a828760d4077d69d7af72f096c285_l3.png "Rendered by QuickLaTeX.com") 。この階数は2で,システムの次数3より小さい。したがって,この3次系は不可制御である。
。この階数は2で,システムの次数3より小さい。したがって,この3次系は不可制御である。![\left[\begin{array}{ccc} B & AB & A^2B \end{array}\right]= \left[\begin{array}{cccccc} 0 & 0 & 1 &-1 &-1 & 1\\ 1 &-1 &-1 & 1 & 0 & 0\\ 0 & 1 & 0 & 2 & 0 & 4 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b6489685f970d758a91f786a979180de_l3.png "Rendered by QuickLaTeX.com") 。この階数は3で,システムの次数3と等しい。
。この階数は3で,システムの次数3と等しい。 。
。![{\rm rank} \left[\begin{array}{cc} B & A-\lambda_1 I_3 \end{array}\right]= {\rm rank} \left[\begin{array}{cccc} 0 & 0 & 1 & 0 \\ 1 & 0 & -1 & 1 \\ 0 & 0 & 0 & -1 \end{array}\right]= 3](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8ac387d8c9e926e0876ad2511344ba70_l3.png "Rendered by QuickLaTeX.com")
 。
。 のみ不安定固有値。\\
のみ不安定固有値。\\![{\rm rank} \left[\begin{array}{cc} B & A-\lambda_3 I_3 \end{array}\right]= {\rm rank} \left[\begin{array}{ccccc} 0 & 0 & -2 & 1 & 0 \\ 1 & -1 & 0 & -2 & 1 \\ 0 & 1 & 0 & 0 & -2 \end{array}\right]= 3](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-24936c92a1e90e689dc378bb582c938c_l3.png "Rendered by QuickLaTeX.com")