1. Optimal Control for a SISO system
Given a 1st-order system with an input and an output:
(1) 
and its stabilizing state feedback:
(2) 
the closed-loop system is represented by
(3) 
The state behavior  and the input behavior
and the input behavior  are given by
are given by
(4) 
and
(5) 
respectively. Then consider a problem to determine  to minimize a criterion function
to minimize a criterion function
(6) 
The first term of the criterion function is calculated as
(7) ![\begin{eqnarray*} J_x&=&\int_0^\infty q^2x^2(t)\,dt \nonumber\\ &=&\int_0^\infty q^2e^{2(a-bf)t}x^2(0)\,dt \nonumber\\ &=&q^2x^2(0)\left[\frac{1}{2(a-bf)}e^{2(a-bf)t}\right]_0^\infty \nonumber\\ &=&\frac{q^2x^2(0)}{2(a-bf)}\left[\underbrace{e^{2(a-bf)\infty}}_{0}-\underbrace{e^{2(a-bf)0}}_{1}\right] \nonumber\\ &=&-\frac{q^2}{2(a-bf)}x^2(0)>0\quad (a-bf<0), \end{eqnarray*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7559be4064d055fb7cda05e82615d8a7_l3.png "Rendered by QuickLaTeX.com")
and the second term of the criterion function is calculated as
(8) ![\begin{eqnarray*} J_u&=&\int_0^\infty r^2u^2(t)\,dt \nonumber\\ &=&\int_0^\infty r^2f^2e^{2(a-bf)t}x^2(0)\,dt \nonumber\\ &=&r^2f^2x^2(0)\left[\frac{1}{2(a-bf)}e^{2(a-bf)t}\right]_0^\infty \nonumber\\ &=&-\frac{r^2f^2}{2(a-bf)}x^2(0)>0\quad (a-bf<0). \end{eqnarray*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-cc45ca8495790c6bd637a24e40a72189_l3.png "Rendered by QuickLaTeX.com")
Therefore, the criterion function can be written as
(9) 
Minimizing  is equivalent to minimizing
is equivalent to minimizing
(10) 
Differentiating by brings
(11) 
Therefore
(12) 
As must satisfy  , we have
, we have
(13) 
This is uniquely determined because  is downward convex as follows:
is downward convex as follows:
(14) 
The closed-loop system by the is given by
(15) 
In the case of  ,
,
(16) 
which means that the new time constant is shorter than the original time constant  .
.
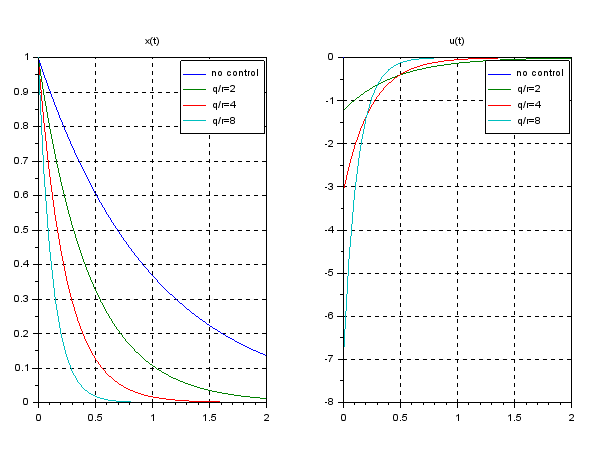
Exercise 1
Letting  ,
,  ,
,  , consider the following cases:
, consider the following cases:
Case#1: 
Case#2: 
Case#3: 
Then simulate the behaviors of and as follows.
Question:
Why do we use not only  but also
but also  in the criterion function.
in the criterion function.
Answer:
Check that is downward convex, and takes the minimum value at  as follows:
as follows:
(17) 
(18) 
For example, letting  , for and
, for and  , the overview of , ,
, the overview of , ,  are drown as follows.
are drown as follows.
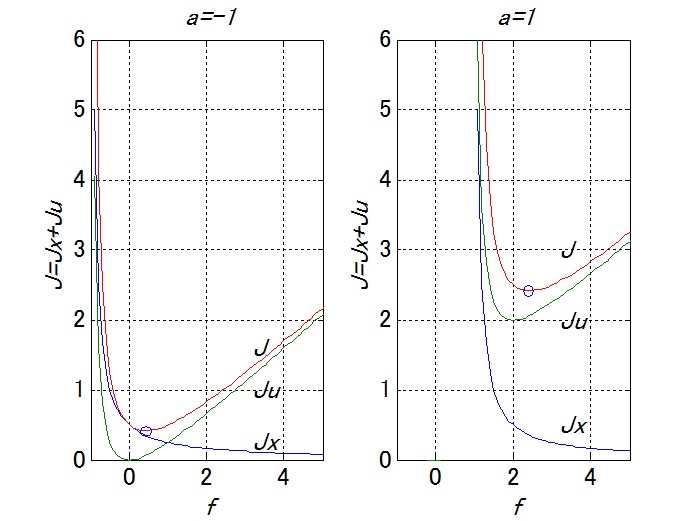
Here the symbol “o” shows the minimum of . Note that is necessary to make downward convex.
Appendix
In order to extend the above discussion to MIMO systems, we should be familiar with Lagrange’s method of undetermined multipliers. We will rewrite the above discussion by using this method as follows.
From (10), note that the constraint on is given by the following Lyapnov’s equation
(19) 
Here  holds because of . Therefore, instead of minimizing , we will minimize
holds because of . Therefore, instead of minimizing , we will minimize
(20) 
using undetermined multiplier  and the stability constraint (19). As the necessary conditions, we have
and the stability constraint (19). As the necessary conditions, we have
(21) 
(22) 
(23) 
Substituting  into (23),
into (23),
(24) 
That is, we have the second-order equation on
(25) 
which is called as Ricatti equation. By solving this, is obtained by
(26) 
and is given by
(27) 
Lastly consider the following matrix:
(28) ![\begin{eqnarray*} {M=\left[\begin{array}{cc} a & -r^{-2}b^2 \\ -q^2 & -a \end{array}\right]}. \end{eqnarray*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-49ea23e8ae7e0bb709d12eb1be58a33a_l3.png "Rendered by QuickLaTeX.com")
which is called as Hamilton matrix. The stable eigenvalue is given by
(29) 
from
(30) 
The corresponding eigenvector is obtained as
(31) ![\begin{eqnarray*} \left[\begin{array}{cc} v_1 \\ v_2 \end{array}\right] =\left[\begin{array}{cc} 1 \\ \frac{-a-\sqrt{a^2+r^{-2}b^2q^2}}{-r^{-2}b^2} \end{array}\right] \end{eqnarray*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-054e996fc3498f6cf60565cada2b6d52_l3.png "Rendered by QuickLaTeX.com")
Note that
(32) 
and
(33) 