1. Speed Control
We are driving a car with a constant speed. Consider the situation that we are necessary to reduce the speed to stop somewhere. How do we manipulate the driving force?
Let  ,
,  and
and  be the mass, the velocity and the driving force at time
be the mass, the velocity and the driving force at time  of the car respectively. Its motion is governed by the following differential equation:
of the car respectively. Its motion is governed by the following differential equation:
(1) 
The problem is how to manipulate the driving force . Consider the following proportional control (P Control):
(2) 
Substituting (2) into (1), we have the closed-loop system:
(3) 
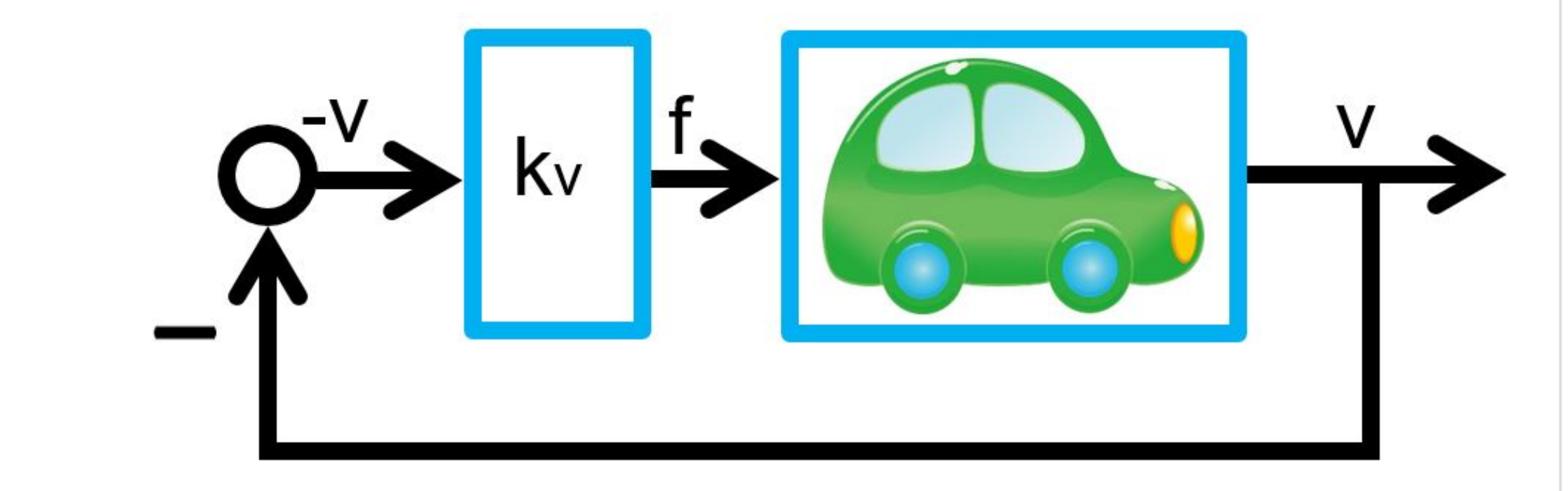
That is, the driving force is manipulated to be proportional to the velocity with negative sign. This means that for a high speed the large regulating force is produced in the reverse direction, and for a low speed the small regulating force is applied. This control strategy is called as feedback mechanism and depicted as follows:
In general, the solution of a differential equation  is given by
is given by
(4) 
Therefore the solution of (3) is given by
(5) 
This means
(6) 
That is, we can reduce the car speed gradually and stop it.
By the way, assume that we are required to change the current speed to the new speed  . How do we manipulate the driving force for the speed up or speed down?
. How do we manipulate the driving force for the speed up or speed down?
Let the velocity error from the current velocity to the required constant speed be
(7) 
Then consider the following proportional control:
(8) 
i.e.
(9) 
Substituting (8) into (1), we have
(10) 
Noting  , this can be rewritten as
, this can be rewritten as
(11) 
Therefore, we have
(12) 
This means
(13) 
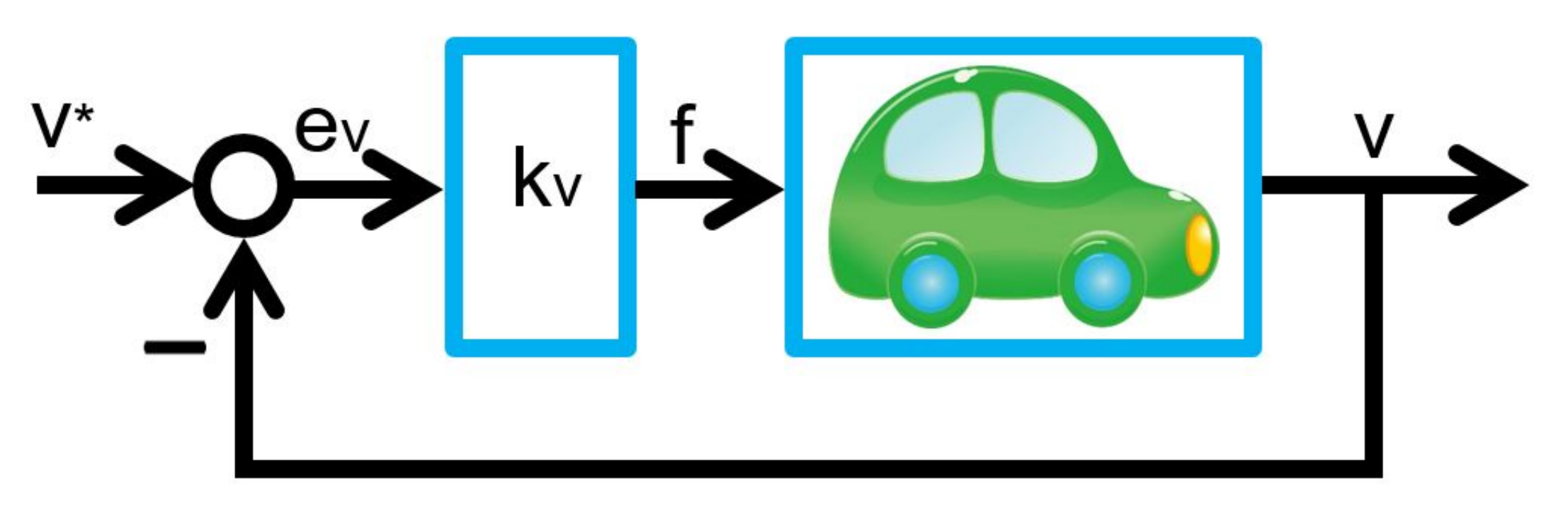
The above control strategy is depicted as follows:
Exercise 1
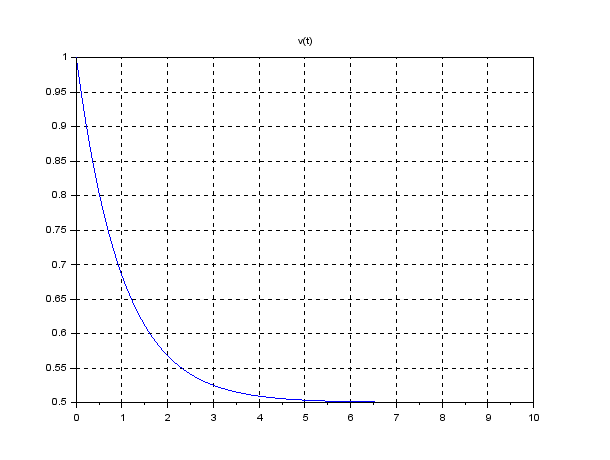
Execute the following program under SCILAB. By changing the P gain  (kv) and the target speed (vs), investigate how the velocity approaches to .
(kv) and the target speed (vs), investigate how the velocity approaches to .
——————————————————————————————————————–
//cart1.sce
function dx=f(t,x),dx=A*x,endfunction
m=1; kv=1; A=-kv/m;
v0=1; vs=0.5; x0=vs-v0;
t0=0; t=0:0.1:10;
x=ode(x0,t0,t,f);
v=vs-x;
scf(1);
plot(t,v), mtlb_grid, title(‘v(t)’)
——————————————————————————————————————–
2. Position Control
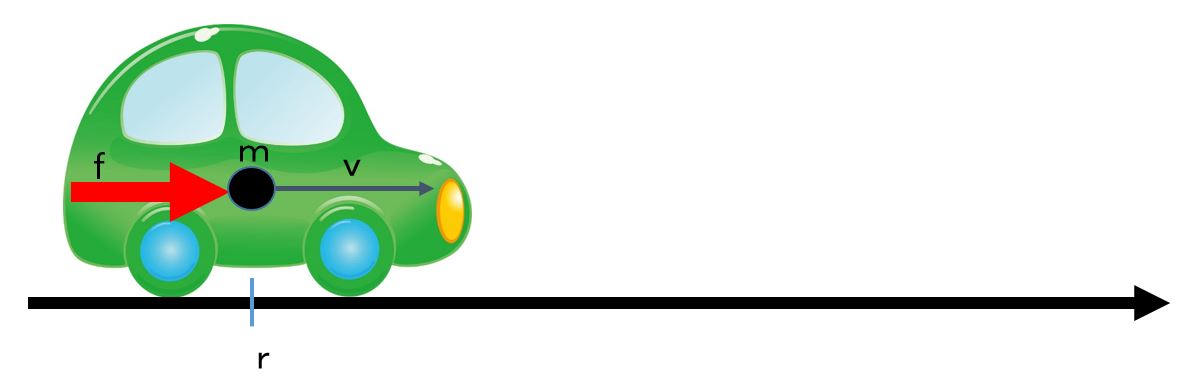
Under the speed control described in the above, we can’t specify the stop position. For example, in the case of encountering an obstacle at the distance  from the current position as shown in the following, we will be required to stop in front of the obstacle. How do we manipulate the driving force in order to stop within the running distance of ?
from the current position as shown in the following, we will be required to stop in front of the obstacle. How do we manipulate the driving force in order to stop within the running distance of ?
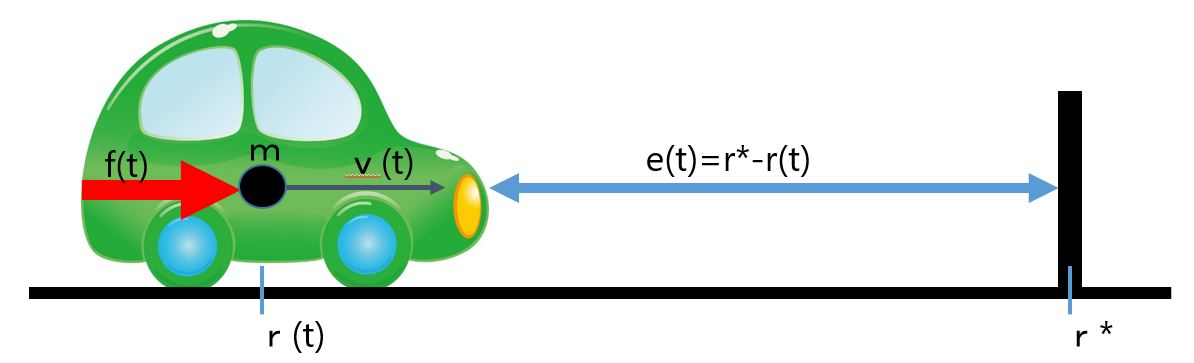
Let ,  , and be the mass, the position and the driving force at time of the car respectively. The velocity is
, and be the mass, the position and the driving force at time of the car respectively. The velocity is  . Its motion is governed by the following differential equation:
. Its motion is governed by the following differential equation:
(14) 
Let the position error from the current position to the required target position be
(15) 
Then consider the following proportional and derivative control (PD Control):
(16) 
i.e.
(17) 
Here  is the speed error given by (7), in which must be 0. Note
is the speed error given by (7), in which must be 0. Note  .
.
Substituting (16) into (1), we have
(18) 
Noting , this can be rewritten as
(19) 
Furthermore, taking account of  , we have
, we have
(20) ![\begin{eqnarray*} \underbrace{ \left[\begin{array}{c} \dot{e}_r(t) \\ \dot{e}_v(t) \end{array}\right] }_{\dot{e}(t)} = \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\frac{k_r}{m} & -\frac{k_v}{m} \end{array}\right] }_{A} \underbrace{ \left[\begin{array}{c} e_r(t) \\ e_v(t) \end{array}\right] }_{e(t)}. \end{eqnarray*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f97b79bd949dcc0d2e6ffafe1fae26e2_l3.png "Rendered by QuickLaTeX.com")
As shown here, the solution is given by
(21) 
As  is a stable matrix, the following holds.
is a stable matrix, the following holds.
(22) 
This means
(23) 
The above control strategy is depicted as follows:
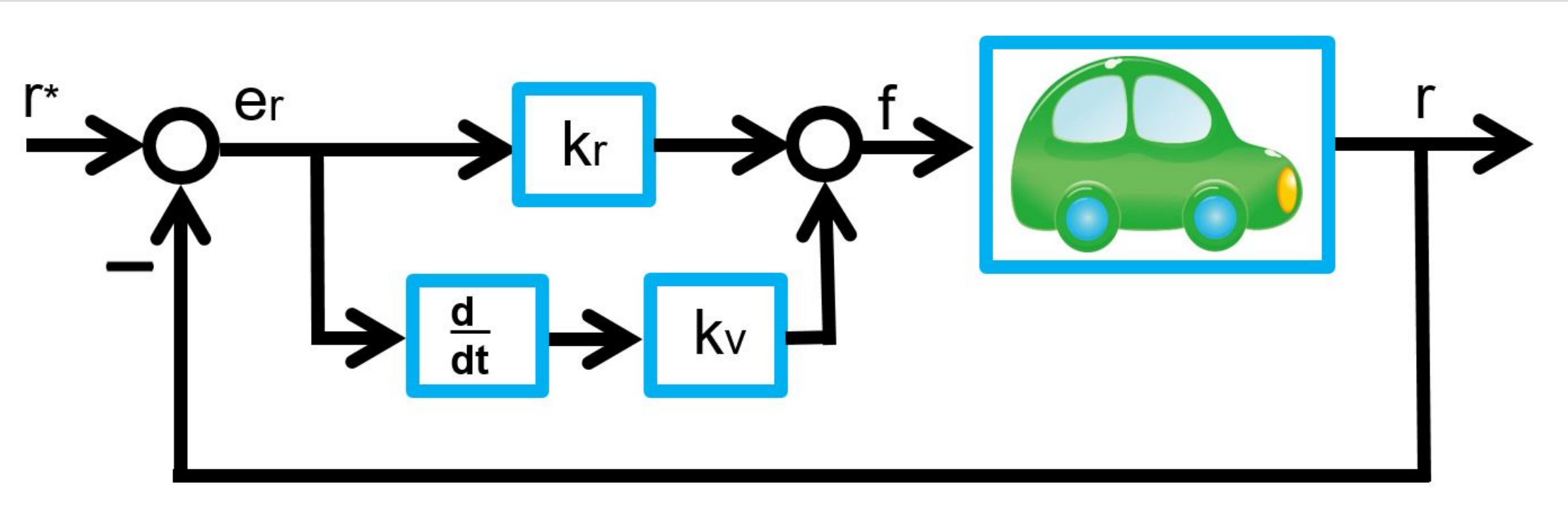
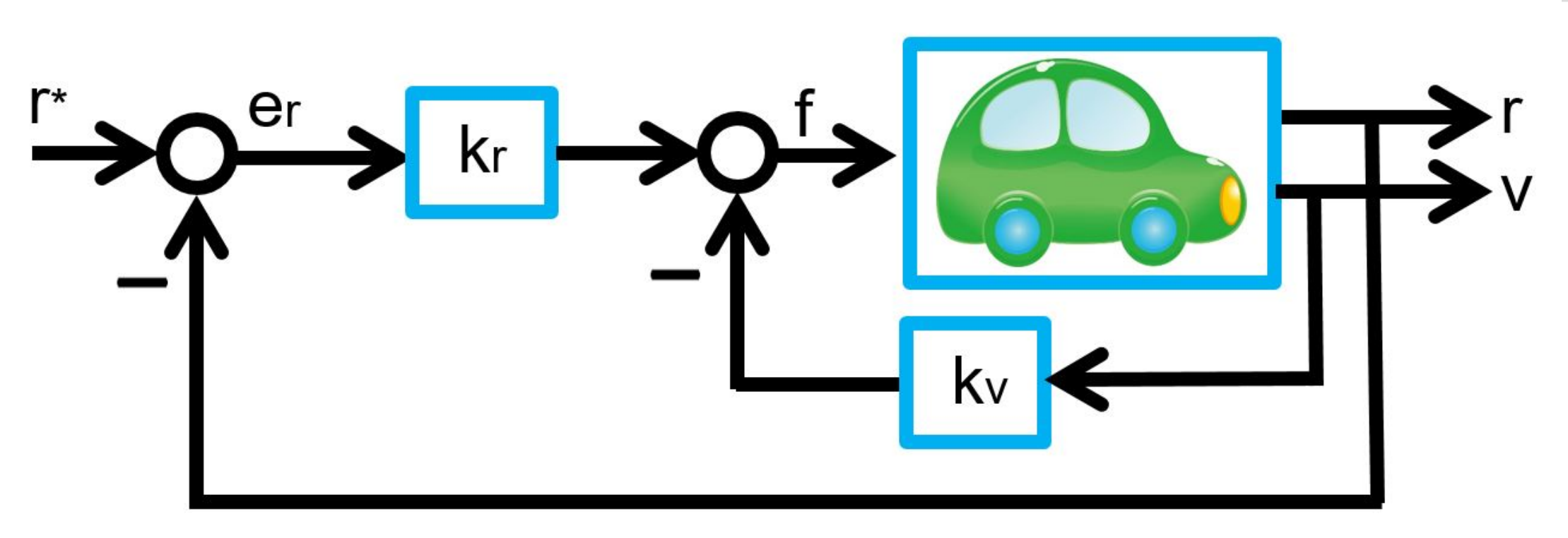
Based on (17), this is equivalent to the following structure:
Exercise 2
Execute the following program under SCILAB. Determine the D gain (kv) for collision avoidance, such that no undershoot occurs in the position .
——————————————————————————————————————–
//cart2.sce
function dx=f(t,x),dx=A*x,endfunction
m=1; kr=1; kv=2; A=[0 1;-kr/m -kv/m];
r0=-1; rs=0; v0=0; vs=0; x0=[rs-r0;vs-v0];
t0=0; t=0:0.1:10;
x=ode(x0,t0,t,f);
v=vs-x(2,:); r=rs-x(1,:);
scf(1);
subplot(211), plot(t,v), mtlb_grid, title(‘v(t)’)
subplot(212), plot(t,r), mtlb_grid, title(‘r(t)’)
——————————————————————————————————————–
Question:
Why the control law (2) is called as not D control but P control?
Answer:
In the situation of the speed control, we are assumed to measure the velocity, that is, we don’t have to differentiate the position. So we need to feed back the value proportional to the measured velocity. On the other hand, in the situation of the position control, we are assumed to measure the position, that is, we have to differentiate the position to get the velocity.