私たちが制御したい対象が物である場合,その振る舞いは物理法則により記述される。一般に,動的な振る舞いを表す物理法則は微分方程式で表される。微分方程式というと尻込みする人もいるかもしれないが,最初は,ニュートンの運動第2法則 に代表されるような,簡単な線形の微分方程式から始めればよい。ただし,これ1本で済むというわけにはいかない。通常は複数本の微分方程式が出てきて,やっかいなことにそれらがお互いに関連し合っている。どんな問題を解く場合も対象の性質をよく分析することが第一歩であるから,連立された微分方程式を扱える統一的表現法があると望ましい。そこで,対象を記述するいくつかの微分方程式を,1階の連立微分方程式としてまとめて,行列表現することがよく行われる。これを制御対象の「状態方程式」と呼ぶ。また,その解変数を「状態変数」という。 に代表されるような,簡単な線形の微分方程式から始めればよい。ただし,これ1本で済むというわけにはいかない。通常は複数本の微分方程式が出てきて,やっかいなことにそれらがお互いに関連し合っている。どんな問題を解く場合も対象の性質をよく分析することが第一歩であるから,連立された微分方程式を扱える統一的表現法があると望ましい。そこで,対象を記述するいくつかの微分方程式を,1階の連立微分方程式としてまとめて,行列表現することがよく行われる。これを制御対象の「状態方程式」と呼ぶ。また,その解変数を「状態変数」という。
さて,制御を行うには対象の動的な振る舞い(状態変数の時間変化)を観測することが必要であり,そのためにセンサが用いられる。ここで,現実には,すべての状態変数にセンサを配置できるわけではなく,通常は状態変数の一部がセンサにより観測される。センサにより観測される変数と状態変数の間の関係式を,制御対象の「出力方程式」と呼ぶ。 本章では,動的な振る舞いが連立線形微分方程式で記述されるいくつかの制御対象に対して,状態方程式と出力方程式をペアにした「状態空間表現」を求める。これを図示した「ブロック線図」は,計算機シミュレーションを行う際にも有用である。 |
1.1 状態空間表現の導出例
1.1.1 ペースメーカ
|
高齢化社会の到来に伴い,より優れた福祉・医療機器の開発が工学分野の大きなテーマの一つとなっている。図1.1に示すのは,心臓のペースメーカの簡単な原理図である。これは,まず左側の閉回路でコンデンサへの充電を行い,つぎにスイッチを切り替えてできる右側の閉回路で放電を行うという動作を周期的に繰り返すことにより,心臓のペースメーカの役割を果たそうとするものである。ここでは,状態方程式を導く最初の例として,このようなRC回路における充電と放電について考える。
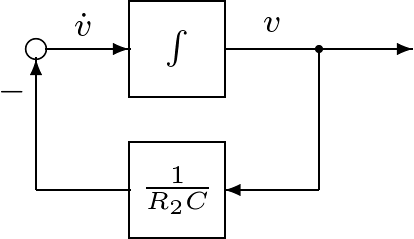
そのために,キルヒホッフの電圧則より,左側閉回路と右側閉回路の回路方程式を考えると,それぞれ (1) (2) となる。ここで, (3) 状態方程式(3)を図1.2のように図示し,これを状態方程式に基づくブロック線図と呼ぶ。この描き方のポイントは,式(3)の右辺を表すのに加え合わせ記号○を用いることと,また 同様に,式(2)から得られる状態方程式は (4) であり,これによるブロック線図は図1.3のように示される。 (5) と与えられることはよいであろう(式(4)に代入して確かめよ)。状態方程式(4)は入力変数をもたないが,状態変数の初期値によって,状態変数の時間的振る舞いが現れる。この意味で,1次系(4)は シミュレーション1.1 式(5)で表されるコンデンサ電圧 (6) によって近似計算しなさい。 |


 はコンデンサの容量,
はコンデンサの容量, は充電回路の抵抗,
は充電回路の抵抗, は心臓の等価抵抗,
は心臓の等価抵抗, は時刻
は時刻 におけるコンデンサ両端の電圧,
におけるコンデンサ両端の電圧, は時刻
は時刻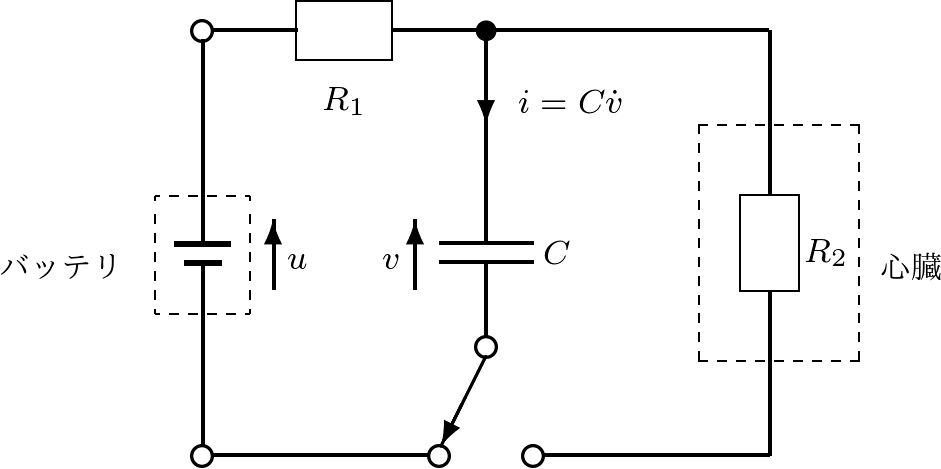
 で割って,つぎの状態方程式を得る。この解変数
で割って,つぎの状態方程式を得る。この解変数
 を積分して
を積分して を得て右辺と左辺を関連付けていることである。なお,加え合わせにおけるプラス符号は省略することが多い。
を得て右辺と左辺を関連付けていることである。なお,加え合わせにおけるプラス符号は省略することが多い。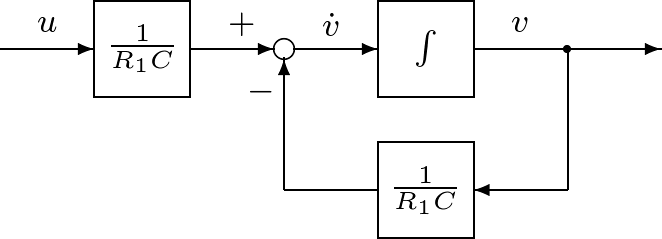


 の時間的振る舞いを,
の時間的振る舞いを, ,
, の場合について図1.4に示す。
の場合について図1.4に示す。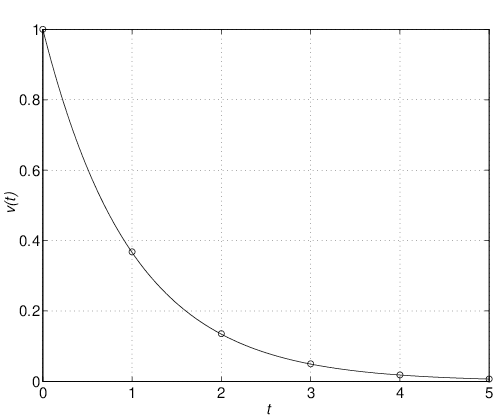
 における
における
*系はsystemの訳語。ここでは「××システム」を簡潔に「××系」と書く。
**本書では,時間応答のコンピュータによるシミュレーション(simulation)の欄を設けた。最終的には時間応答の数学的理解が大切であるが,まずは,なぜそのような時間的振る舞いが現れるのかを物理的イメージをもって考えながら,典型的な時間応答に親しみをもってほしい。なお,本書の数値計算については演習問題の【4】を参照のこと。
1.1.2 教室のドア
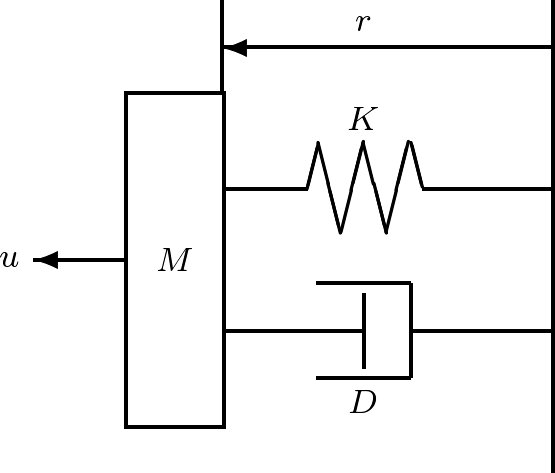
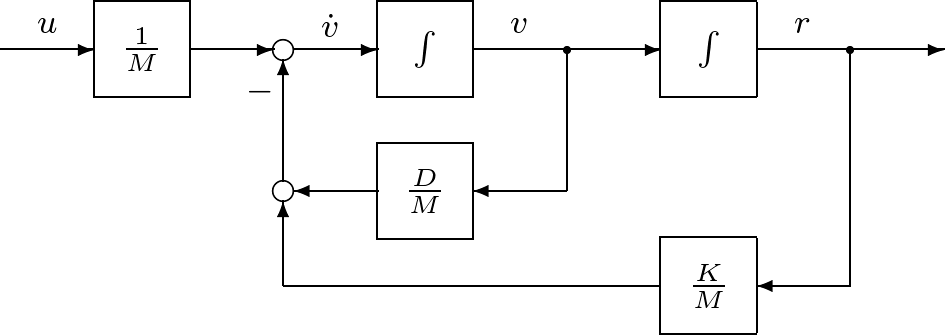
教室で物の動きを実感できるものに,図1.5に示すようなばねとダンパ からなる緩衝装置を付けたドアがある。これは,開いたドアをできるだけ速やかに静かに閉めるためのものである。 からなる緩衝装置を付けたドアがある。これは,開いたドアをできるだけ速やかに静かに閉めるためのものである。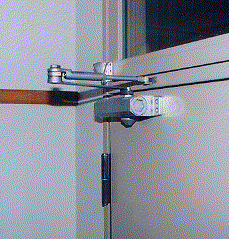 図1.5 緩衝装置をつけたドア このドアの運動は回転運動であるが,話しをわかりやすくするため,図1.6に示すような等価な直線運動として調べてみよう。その出発点は,ニュートンの運動第2法則 (7) である。ここで, (8) のように表すことができる。ここで,ダンパが第1項の力を,ばねが第2項の力を与える。 (9) を得る。 (10) (11) のような1階の連立線形微分方程式で表される。これらを行列表示すると (12) のような状態方程式を得る (13) を得るセンサはあるが,ドアの速度を計測するセンサはないものとする。このとき, (14) 以上から,ドアに対して,状態方程式(12)と出力方程式(14)からなる2次系(second-order system)としての状態空間表現を得た。 シミュレーション 式(12)において,
|

 はドアの質量,
はドアの質量, は時刻
は時刻 は時刻
は時刻
 は人がドアに与える力である。式(
は人がドアに与える力である。式(
 を定義すると
を定義すると

![\begin{equation*} \underbrace{ \left[\begin{array}{c} \dot{r}(t) \\ \dot{v}(t) \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ -\frac{K}{M} & -\frac{D}{M} \end{array}\right] }_A \underbrace{ \left[\begin{array}{c} r(t) \\ v(t) \end{array}\right] }_{x(t)}+ \underbrace{ \left[\begin{array}{c} 0 \\ \frac{1}{M} \end{array}\right] }_B u(t) \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1c7d500e812b8db8f7ef93fb748d863a_l3.png "Rendered by QuickLaTeX.com")
 の
の 倍の電圧
倍の電圧 ,すなわち
,すなわち
![\begin{equation*} \underbrace{y_r(t)}_{y(t)}= \underbrace{ \left[\begin{array}{cc} c_r & 0 \end{array}\right] }_C \underbrace{ \left[\begin{array}{c} r(t) \\ v(t) \end{array}\right] }_{x(t)} \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ba917ead63a659449c7ce89833f94df6_l3.png "Rendered by QuickLaTeX.com")
 ,
,  ,
, ,
, ,
, のとき,
のとき, の三つの場合について,ドア開度
の三つの場合について,ドア開度 の時間的振る舞いを図1.8に示す。
の時間的振る舞いを図1.8に示す。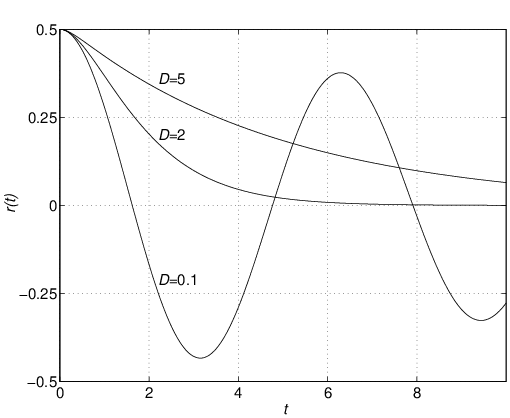
*ばねとダンパの特性値を調整するためのねじを回すことにより行われる。
**本書では, のように書いて,△を○で定義・表記する(△は○に等しいとする)。
のように書いて,△を○で定義・表記する(△は○に等しいとする)。
1.1.3 直流モータ
|
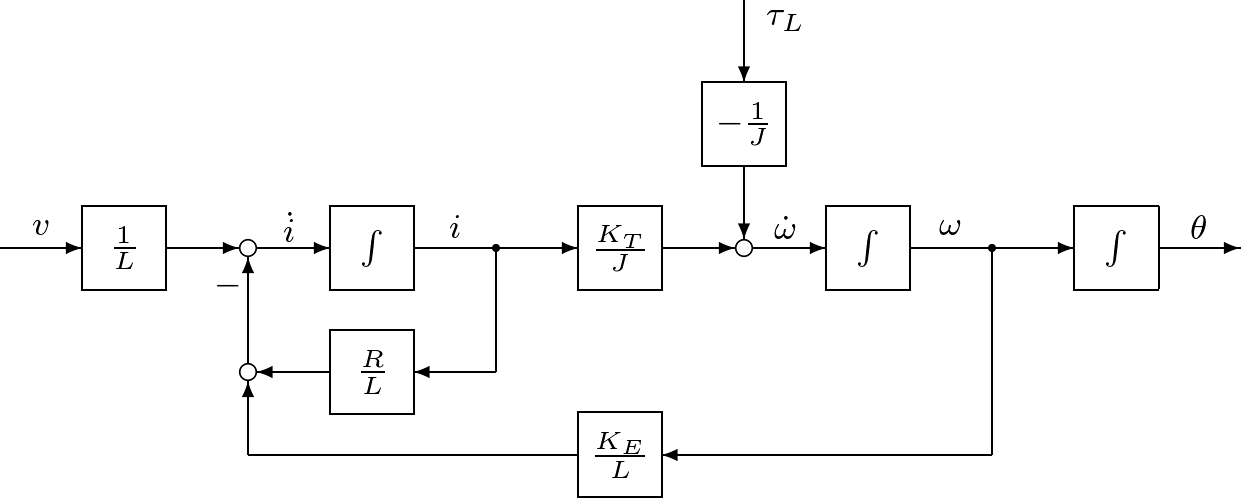
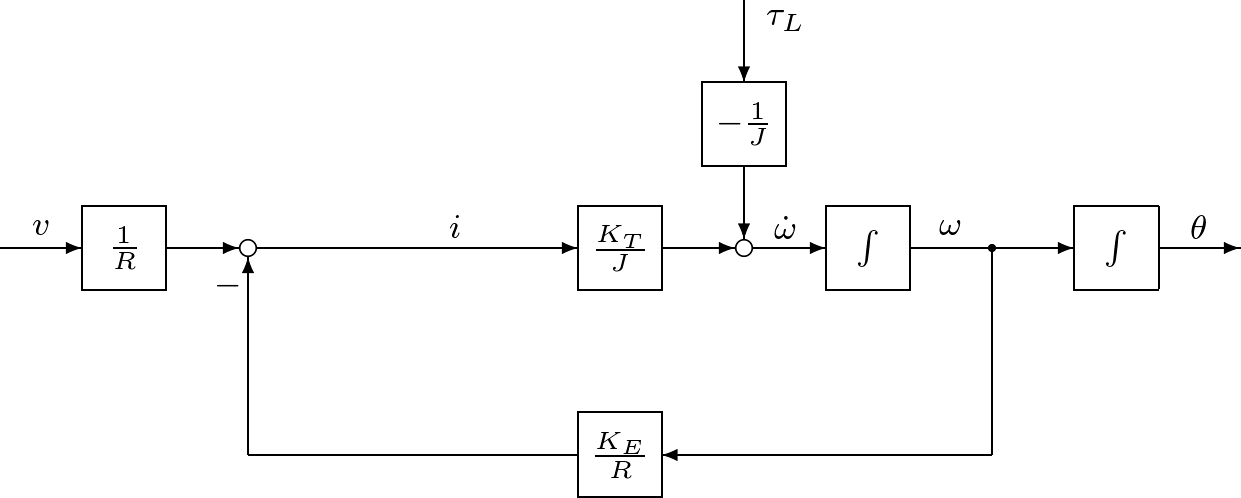
代表的なアクチュエータとしてモータがある。例えば図1.9に示すのは,ロボットアームを駆動する直流モータである。  図1.9 直流モータ このモデルは図1.10のように表される。 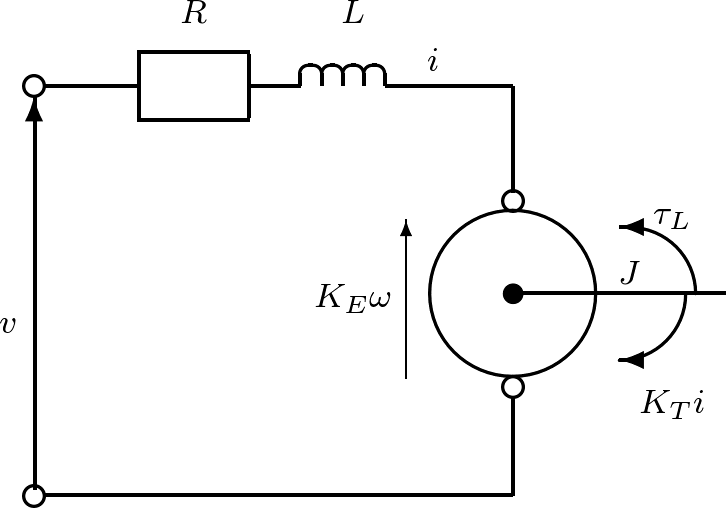 図1.10 直流モータのモデル このとき,つぎが成り立つ。 (15) (16) ここで,式(15)は機械系としての運動方程式であるが,電流による発生トルクの項 (17) (18) (19) のような状態方程式を得る。状態方程式(19)は二つの入力変数 (20) となる。このように,直流モータに対して,状態方程式(19)と出力方程式(20)からなる3次系(third-order system)としての状態空間表現を得た。つぎに一つのシミュレーション例を示す。 (21) で与えられ,上の例では (22) これから (23) (24) は直流モータの機械的時定数と呼ばれている。上の例で計算してみると (25) 式(19)と比較すると,状態空間表現の次数を1だけ減らしたことになる。 低次元化の過程を図1.12~図1.14に示しておく。 |


 を含む。
を含む。 はトルク定数と呼ばれる。また,式(
はトルク定数と呼ばれる。また,式( による逆起電力の項
による逆起電力の項 を含む。
を含む。 は逆起電力定数と呼ばれる。このように,モータは機械系と電気系の混合系という特徴をもつ。式(
は逆起電力定数と呼ばれる。このように,モータは機械系と電気系の混合系という特徴をもつ。式(
![\begin{eqnarray*} %\begin{equation} %\renewcommand{\arraystretch}{1.3} %\begin{array}{rl} \underbrace{ \left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & J & 0 \\ 0 & 0 & L \end{array}\right] }_{E} \left[\begin{array}{c} \dot{\theta}(t) \\ \dot{\omega}(t) \\ \dot{i}(t) \end{array}\right] & = \underbrace{ \left[\begin{array}{ccc} 0 & 1 & 0 \\ 0 & 0 & K_T \\ 0 & -K_E & -R \end{array}\right] }_{A} \left[\begin{array}{c} \theta(t) \\ \omega(t) \\ i(t) \end{array}\right] \nonumber\\ & + \underbrace{ \left[\begin{array}{cc} 0 & 0 \\ 0 & -1 \\ 1 & 0 \end{array}\right] }_{B} \left[\begin{array}{cc} v(t) \\ \tau_L(t) \end{array}\right] %\end{array} %\end{equation} \end{eqnarray*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8c9f17ab2cf165ed53693c17a0d06a1b_l3.png "Rendered by QuickLaTeX.com")
 をかけて
をかけて![\begin{equation*} \underbrace{ \left[\begin{array}{c} \dot{\theta}(t) \\ \dot{\omega}(t) \\ \dot{i}(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{ccc} 0 & 1 & 0 \\ 0 & 0 & \frac{K_T}{J} \\ 0 & -\frac{K_E}{L} & -\frac{R}{L} \end{array}\right] }_{E^{-1}A} \underbrace{ \left[\begin{array}{c} \theta(t) \\ \omega(t) \\ i(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{cc} 0 & 0 \\ 0 & -\frac{1}{J} \\ \frac{1}{L} & 0 \end{array}\right] }_{E^{-1}B} \underbrace{ \left[\begin{array}{cc} v(t) \\ \tau_L(t) \end{array}\right] }_{u(t)} \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-26653bd3a6e2a14d2a2dd8ae426bf5f9_l3.png "Rendered by QuickLaTeX.com")
 をもち,
をもち, は操作できない外乱であることに注意してほしい。
は操作できない外乱であることに注意してほしい。 の
の 倍の電圧
倍の電圧 と,角加速度
と,角加速度 の
の 倍の電圧
倍の電圧 が測れるものとすると,出力方程式は
が測れるものとすると,出力方程式は![\begin{equation*} \underbrace{ \left[\begin{array}{c} y_\theta(t) \\ y_\omega(t) \end{array}\right] }_{y(t)}= \underbrace{ \left[\begin{array}{ccc} c_\theta & 0 & 0 \\ 0 & c_\omega & 0 \end{array}\right] }_C \underbrace{ \left[\begin{array}{c} \theta(t) \\ \omega(t) \\ i(t) \end{array}\right] }_{x(t)} \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3d3a761f1082c0bb1c76cbac090b269d_l3.png "Rendered by QuickLaTeX.com")
 ,
, ,
, ,
, ,
, のとき,
のとき, ,
, ,
, の場合の
の場合の と
と の時間的振る舞いを図1.11に示す
の時間的振る舞いを図1.11に示す の時定数
の時定数
 である。ところが,図1.11からわかるように,
である。ところが,図1.11からわかるように, である。したがって,電流は角速度に比べて10倍速く落ち着くので,式(
である。したがって,電流は角速度に比べて10倍速く落ち着くので,式(


 である。したがって,もし,直流モータの電気的時定数が機械的時定数に比べて十分小さい場合(経験則は
である。したがって,もし,直流モータの電気的時定数が機械的時定数に比べて十分小さい場合(経験則は )は,式(
)は,式(![\begin{equation*} \underbrace{ \left[\begin{array}{c} \dot{\theta}(t) \\ \dot{\omega}(t) \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 0 & -\frac{1}{T_m} \end{array}\right] }_A \underbrace{ \left[\begin{array}{c} \theta(t) \\ \omega(t) \end{array}\right] }_{x(t)}+ \underbrace{ \left[\begin{array}{cc} 0 & 0 \\ \frac{1}{T_mK_E} & -\frac{1}{J} \end{array}\right] }_B \underbrace{ \left[\begin{array}{c} v(t)\\ \tau_L(t) \end{array}\right] }_{u(t)} \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b6118b470740014f12ba99fab45c5044_l3.png "Rendered by QuickLaTeX.com")
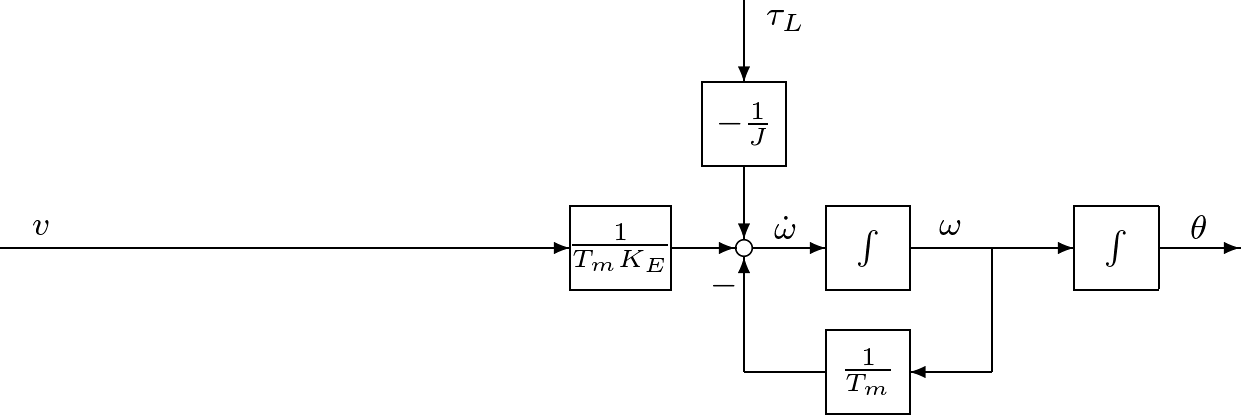
*式(18)は,式(19)のように物理パラメータどうしの演算を含まず,それらの変動の影響を考察するのに便利な形式であり,ディスクリプタ形式の状態方程式と呼ばれる。
**ここでは,2.1.3項で学ぶ時定数の知識を前提にしている。
1.2 状態空間表現へのモデリング
前節で述べた内容は,モデリング(modeling)という枠組でとらえられる。これは,何らかの対象に対して,目的に応じた科学的分析を通してそのモデルを得ようとするものである。私たちが扱う対象は,入力と出力をもつ動的システム(dynamical system)であり,そのモデリングを行うのは動的な振る舞いの制御のためであるので,制御対象(controlled object)と呼ばれる。ここでの科学的分析とは,おもに物理法則から線形定係数常微分方程式 で表される運動方程式や回路方程式の導出と,これに含まれるパラメータ値の決定をいう。そして,モデルの一つとして,状態空間表現(state-space description)という数理モデル で表される運動方程式や回路方程式の導出と,これに含まれるパラメータ値の決定をいう。そして,モデルの一つとして,状態空間表現(state-space description)という数理モデル (mathematical model)を考え,その構築例を示してきた。 (mathematical model)を考え,その構築例を示してきた。
本書では,状態空間表現を次式のように書く。 (26) (27) ここで, |


 は
は 個の入力変数(input variables)をもつベクトル,
個の入力変数(input variables)をもつベクトル, は
は 個の出力変数(output variables)をもつベクトルである。また,
個の出力変数(output variables)をもつベクトルである。また, は,それぞれサイズ
は,それぞれサイズ ,
, ,
, ,
, の実行列であり,それぞれ
の実行列であり,それぞれ の項は直達項(direct part)を表し,存在しないこともある。特に,1次系のときは,
の項は直達項(direct part)を表し,存在しないこともある。特に,1次系のときは, などと書く。
などと書く。*動的システムは,微分方程式・差分方程式のどちらで記述されるかによって連続時間系・離散時間系,重ね合わせの原理が成り立つか否かによって線形系・非線形系,常微分方程式か偏微分方程式かによって集中定数系・分布定数系,係数パラメータの時間依存性によって時変系・時不変系,入出力が確率過程であるか否かによって決定系・確率系などに分類される。
**非線形系の場合の取り扱いは7章で述べる。1~6章までは線形時不変系のみを扱う。
***他の数理モデルとして伝達関数表現がある。状態空間表現と伝達関数表現の間の相互関係については8章で述べる。
****他のアプローチとして,入力と出力の時系列データからモデリングを行うシステム同定がある。
1.3 状態空間表現の座標変換
| 状態空間表現を見やすくする一つの手段として,座標変換(coordinate transformation)があるので,これについて説明しよう。 いま,  次系 次系
(28) (29) に対して,つぎの座標変換を行いたい。 (30) (31) に注意して (32) %すなわち (33) (34) となる。この結果を,参照しやすいようにつぎにまとめておく。 定理1.1 (35) (36) (37) 例題1.1 直流モータの状態方程式(25)において, (38) である。これに対して,座標変換 (39) を行うと,新しい状態方程式は (40) となることを示しなさい。 解答 座標変換後の (41) (42) のように得られる。 ここで,2次系の状態方程式が,二つの1次系の状態方程式 (43) に分離されており,入力から状態変数への影響の考察をしやすくなっていることに注意してほしい。 |



 は正則とする。式(
は正則とする。式(



 に対して,座標変換
に対して,座標変換 を行うと,新しい
を行うと,新しい


![\begin{equation*} \underbrace{ \left[\begin{array}{c} \dot{\theta}(t)\\ \dot{\omega}(t) \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 1 \\ 0 & -\frac{1}{T_m} \end{array}\right] }_A \underbrace{ \left[\begin{array}{c} \theta(t)\\ \omega(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{c} 0 \\ \frac{1}{T_mK_E} \end{array}\right] }_B \underbrace{ v(t) }_{u(t)} % \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-06edd7a3c72279d04bbf853ea6c6bdd5_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} \underbrace{ \left[\begin{array}{c} x'_1(t) \\ x'_2(t) \end{array}\right] }_{x'(t)} = \underbrace{ \left[\begin{array}{cc} 1 & T_m \\ 0 & -T_m \end{array}\right] }_T \underbrace{ \left[\begin{array}{c} \theta(t) \\ \omega(t) \end{array}\right] }_{x(t)} % \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c6eae3ed06b9f97fd4eaffb60d82c161_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} \underbrace{ \left[\begin{array}{c} \dot{x}'_1(t) \\ \dot{x}'_2(t) \end{array}\right] }_{\dot{x}'(t)}= \underbrace{ \left[\begin{array}{cc} 0 & 0 \\ 0 & -\frac{1}{T_m} \end{array}\right] }_{A'} \underbrace{ \left[\begin{array}{c} x'_1(t) \\ x'_2(t) \end{array}\right] }_{x'(t)} + \underbrace{ \left[\begin{array}{c} \frac{1}{K_E} \\ -\frac{1}{K_E} \end{array}\right] }_{B'} \underbrace{ v(t) }_{u(t)} \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e26ebb2f15db7052666007c6f7713109_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} \underbrace{ \left[\begin{array}{cc} 1 & T_m \\ 0 & -T_m \end{array}\right] \left[\begin{array}{cc} 0 & 1 \\ 0 & -\frac{1}{T_m} \end{array}\right] \left[\begin{array}{cc} 1 & 1 \\ 0 & -\frac{1}{T_m} \end{array}\right] }_{TAT^{-1}} = \underbrace{ \left[\begin{array}{cc} 0 & 0 \\ 0 & -\frac{1}{T_m} \end{array}\right] }_{A'} \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-063430e3eba82786ff27bab3362214fe_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} \underbrace{ \left[\begin{array}{cc} 1 & T_m \\ 0 & -T_m \end{array}\right] \left[\begin{array}{cc} 0 \\ \frac{1}{T_mK_E} \end{array}\right] }_{TB} = \underbrace{ \left[\begin{array}{c} \frac{1}{K_E} \\ -\frac{1}{K_E} \end{array}\right] }_{B'} \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-782f939b9de9db6e02c2932b3e39543c_l3.png "Rendered by QuickLaTeX.com")

1.4 状態空間表現の直列結合
| 制御対象の状態空間表現を求める際に,図1.15に示すように,二つの部分システムの状態空間表現を求めておいて,これらを直列結合(serial connection)する場合がある。このときの結合システムの状態空間表現を求めることを考える。
まず,その結果を定理の形で示そう。 (44) (45) (46) (47) に対して, (48) (49) のように得られる。 証明 (50) (51) となる。第1式と (52) (53) に対して( (54) (55) を, 解答 定理1.2を用いて,直列結合の状態空間表現として (56) (57) が得られる 問1.4 例題1.2の直列結合の状態空間表現を,状態ベクトルが |

 )
)



![\begin{equation*} \left[\begin{array}{c} \dot{x}_1(t) \\ \dot{x}_2(t) \end{array}\right]= \left[\begin{array}{cc} A_1 & B_1C_2 \\ 0 & A_2 \end{array}\right] \left[\begin{array}{c} x_1(t) \\ x_2(t) \end{array}\right] + \left[\begin{array}{cc} B_1D_2 \\ B_2 \end{array}\right] u_2(t) \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-5712fcac5d17d5fb08311d45264381af_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} y_1(t)= \left[\begin{array}{cc} C_1 & D_1C_2 \end{array}\right] \left[\begin{array}{c} x_1(t) \\ x_2(t) \end{array}\right] +D_1D_2u_2(t) \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-aaa8a39916edda9b928224e752e353aa_l3.png "Rendered by QuickLaTeX.com")
 と
と に,
に, を代入して
を代入して

 をまとめたものと,第2式から,定理の結果を得る。
をまとめたものと,第2式から,定理の結果を得る。![\begin{equation*} \dot x(t)= \left[\begin{array}{cc} 0 & 1 \\ -\omega_n^2 & -2\zeta\omega_n \end{array}\right] x(t)+ \left[\begin{array}{cc} 0 \\ K\omega_n^2 \end{array}\right] u(t) \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-059e2ade242d33901610efaf2acd0d4b_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} y(t)=\left[\begin{array}{cc} 1 & 0 \end{array}\right]x(t) \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e057faa896743d9caeedb9e13abc252a_l3.png "Rendered by QuickLaTeX.com")


 のように直列結合した場合の状態空間表現を求めなさい。
のように直列結合した場合の状態空間表現を求めなさい。![\begin{equation*} \left[\begin{array}{c} \dot{x}(t) \\ \dot{x}_a(t) \end{array}\right]= \left[\begin{array}{cc|c} 0 & 1 & 0\\ -\omega_n^2 & -2\zeta\omega_n & K\omega_n^2 \\\hline 0 & 0 & -\frac{1}{T_a} \end{array}\right] \left[\begin{array}{c} x(t) \\ x_a(t) \end{array}\right]+ \left[\begin{array}{cc} 0 \\ 0 \\\hline \frac{K_a}{T_a} \end{array}\right] u_a(t) \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-375c43a38aaae14e657cf77df359e493_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} y(t)= \left[\begin{array}{cc|c} 1 & 0 & 0 \end{array}\right] \left[\begin{array}{c} x(t) \\ x_a(t) \end{array}\right] \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-3d2f61bd32f7d8715d37b648a2ae7848_l3.png "Rendered by QuickLaTeX.com")
![[x_a(t)\ x(t)]^T](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d5eb3e7a59283dd1ae84ccfa9f522a4f_l3.png "Rendered by QuickLaTeX.com") となるように求めなさい。
となるように求めなさい。*ここで, 行列の縦線と横線,
行列の縦線と横線, 行列の横線は,状態ベクトルの要素
行列の横線は,状態ベクトルの要素 ,
, のサイズに適合するように引かれている。
のサイズに適合するように引かれている。
演習問題
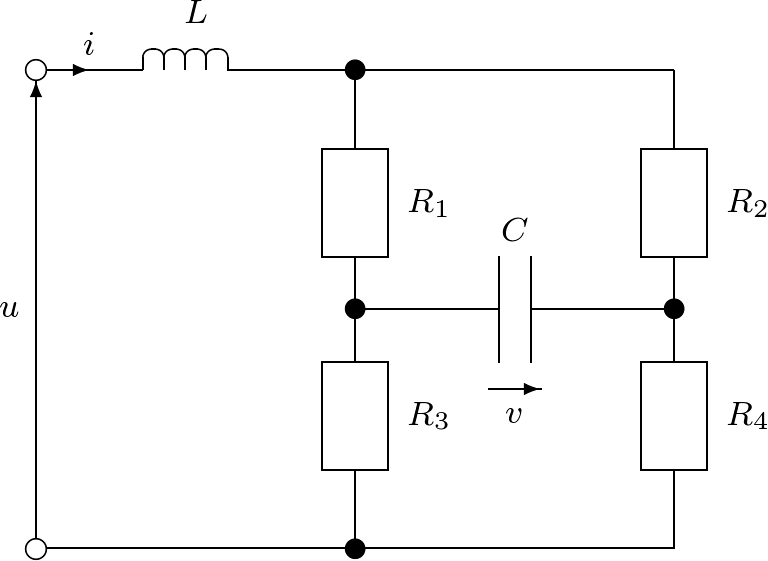
【1】 いろいろな計測装置の基礎となる電気回路の一つにブリッジ回路がある。 例えば,図1.16に示すブリッジ回路 を考えてみよう。この回路方程式は
(58) (59) で与えられる。いま,ブリッジ条件 (60) が成り立つとして,つぎの状態方程式を導出しなさい。 (61) この状態方程式に基づいて,平衡ブリッジ回路のブロック線図を描きなさい。
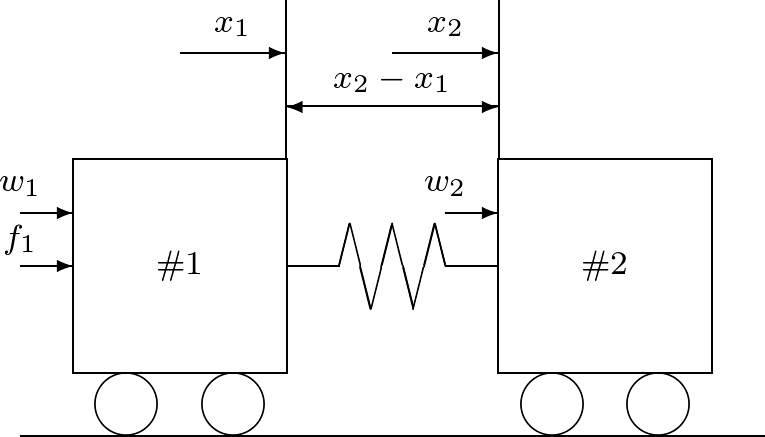
(62) (63) で与えられる。ここで, (64) この状態方程式に基づいて,連結台車のブロック線図を描きなさい。
MATLABとSIMULINKが手元にあれば,シミュレーション1.3と同一条件下で,直流モータの低次元化後の状態方程式25による角速度の応答を,低次元化前の状態方程式19によるものと比較しなさい。  図1.18 SIMULINKによる微分方程式のブロック表現 図1.18 SIMULINKによる微分方程式のブロック表現 |



![\begin{equation*} \underbrace{ \left[\begin{array}{c} \dot{i}(t) \\ \dot{v}(t) \end{array}\right] }_{\dot{x}(t)}= \underbrace{ \left[\begin{array}{cc} -\frac{1}{L}(\frac{R_1R_2}{R_1+R_2}+\frac{R_3R_4}{R_3+R_4})\ \ 0 \\ 0\ \ -\frac{1}{C}(\frac{1}{R_1+R_2}+\frac{1}{R_3+R_4}) \end{array}\right] }_A \underbrace{ \left[\begin{array}{c} i(t) \\ v(t) \end{array}\right] }_{x(t)}+ \underbrace{ \left[\begin{array}{c} \frac{1}{L} \\ 0 \end{array}\right] }_B u(t) \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a8387d56c5b1e0a5d7e4371a7c5bf88f_l3.png "Rendered by QuickLaTeX.com")


 と
と はそれぞれ台車1と台車2の質量,
はそれぞれ台車1と台車2の質量, はばね定数である。このとき,つぎの状態方程式を導出しなさい。
はばね定数である。このとき,つぎの状態方程式を導出しなさい。![\begin{equation*} \begin{array}{rcl} \underbrace{ \left[\begin{array}{c} \dot{x_1}(t) \\ \dot{x_2}(t) \\ \dot{v_1}(t) \\ \dot{v_2}(t) \end{array}\right] }_{\dot{x}(t)} &=& \underbrace{ \left[\begin{array}{cccc} 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ -\frac{k}{m_1} & \frac{k}{m_1} & 0 & 0 \\ \frac{k}{m_2} & -\frac{k}{m_2} & 0 & 0 \end{array}\right] }_A \underbrace{ \left[\begin{array}{c} x_1(t) \\ x_2(t) \\ v_1(t) \\ v_2(t) \end{array}\right] }_{x(t)} \\ & & \hspace*{-1zw} + \underbrace{ \left[\begin{array}{ccc} 0 & 0 & 0 \\ 0 & 0 & 0 \\ \frac{1}{m_1} & 0 & \frac{1}{m_1} \\ 0 & \frac{1}{m_2} & 0 \end{array}\right] }_B \underbrace{ \left[\begin{array}{c} w_1(t)\\ w_2(t)\\ f_1(t) \end{array}\right] }_{u(t)} \end{array} \end{equation*}](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-726aaf73212dd3c34a1e3daca7912d95_l3.png "Rendered by QuickLaTeX.com")
 ,一定負荷
,一定負荷 のもとで,一定角速度
のもとで,一定角速度 の平衡状態が達成されているものとする。この平衡状態を基準とする直流モータの時間的振る舞いを表す状態方程式を示しなさい。
の平衡状態が達成されているものとする。この平衡状態を基準とする直流モータの時間的振る舞いを表す状態方程式を示しなさい。 を用いて得ている。時間応答のシミュレーションのためには,状態方程式のブロック線図を描くことが必要となる。例えば,心臓のペースメーカのブロック線図(図1.3)を得たとすると,SIMULINKでは,これを図1.18のようにほぼそのままの構成で,対話型操作により表現する。ブロックIntegratorの初期値とブロックGainの値を設定し,微分方程式のソルバーの種類,サンプリング周期,シミュレーション時間などを設定すれば,ブロックScopeに図1.1の時間応答を直ちにみることができる。時系列データの処理やグラフ化はMATLABで行える。
を用いて得ている。時間応答のシミュレーションのためには,状態方程式のブロック線図を描くことが必要となる。例えば,心臓のペースメーカのブロック線図(図1.3)を得たとすると,SIMULINKでは,これを図1.18のようにほぼそのままの構成で,対話型操作により表現する。ブロックIntegratorの初期値とブロックGainの値を設定し,微分方程式のソルバーの種類,サンプリング周期,シミュレーション時間などを設定すれば,ブロックScopeに図1.1の時間応答を直ちにみることができる。時系列データの処理やグラフ化はMATLABで行える。*高橋・有本:回路網とシステム理論,コロナ社 (1974)のpp.65 66から引用。
66から引用。
**B.Wie, D.2.Bernstein : Benchmark Problems for Robust Control Design, ACC Proc. pp.20472048 (1992) から引用。
***The Student Edition of MATLAB-Version\,5 User’s Guide, Prentice Hall (1997)
****The Student Edition of SIMULINK-Version\,2 User’s Guide, Prentice Hall (1998)