| MATLAB |
%cSPIN_of_gs.m
%-----
clear all close all
J1=1; J2=1; J3=0.5;
OMnom=2*pi; OMmin=0*OMnom; OMmax=2*OMnom;
% sim("SPIN0")
A1=[0 (J2-J3)/J1;(J3-J1)/J2 0];
B=diag([1/J1 1/J2]); C=eye(2); D=zeros(2,2);
S0=[zeros(2,2) B;C D];
S1=zeros(4,4); S1(1:2,1:2)=A1;
% sim("SPIN")
%-----
J1=1; J2=1; J3=0.5;
OMnom=2*pi; OMmin=0*OMnom; OMmax=2*OMnom;
A1= OMmin*[0 (J2-J3)/J1;(J3-J1)/J2 0];
A2= OMmax*[0 (J2-J3)/J1;(J3-J1)/J2 0];
B=diag([1/J1 1/J2]);
B1=B; B2=B;
C1=[eye(2,2);zeros(2,2)];
D11=zeros(4,2);
D12=[zeros(2,2);eye(2,2)];
C2=eye(2,2);
D21=zeros(2,2);
D22=zeros(2,2);
%-----
alpha=1; r=3; th=pi/4;
LMIs=of_synlmi7(A1,A2,B1,B2,C1,C2,D11,D12,D21,D22,alpha,r,th);
cobj=zeros(1,decnbr(LMIs));
cobj(1)=1;
[cost,xopt]=mincx(LMIs,cobj);
gopt=dec2mat(LMIs,xopt,1)
R=dec2mat(LMIs,xopt,2);
S=dec2mat(LMIs,xopt,3);
%-----
ak1=dec2mat(LMIs,xopt,4);
bk1=dec2mat(LMIs,xopt,5);
ck1=dec2mat(LMIs,xopt,6);
dk1=dec2mat(LMIs,xopt,7);
[u,sd,v]=svd(eye(size(A1,1))-R*S);
sd=diag(sqrt(1./diag(sd)));
Ni=sd*v'; Mti=u*sd;
AK1=Ni*(ak1-S*(A1-B2*dk1*C2)*R-bk1*C2*R-S*B2*ck1)*Mti;
BK1=Ni*(bk1-S*B2*dk1);
CK1=(ck1-dk1*C2*R)*Mti;
DK1=dk1;
K1=[AK1 BK1;CK1 DK1];
ACL1=[A1+B2*DK1*C2 B2*CK1;
BK1*C2 AK1];
plCL1=eig(ACL1)
%-----
ak2=dec2mat(LMIs,xopt,8);
bk2=dec2mat(LMIs,xopt,9);
ck2=dec2mat(LMIs,xopt,10);
dk2=dec2mat(LMIs,xopt,11);
[u,sd,v]=svd(eye(size(A2,1))-R*S);
sd=diag(sqrt(1./diag(sd)));
Ni=sd*v'; Mti=u*sd;
AK2=Ni*(ak2-S*(A2-B2*dk2*C2)*R-bk2*C2*R-S*B2*ck2)*Mti;
BK2=Ni*(bk2-S*B2*dk2);
CK2=(ck2-dk2*C2*R)*Mti;
DK2=dk2;
K2=[AK2 BK2;CK2 DK2];
ACL2=[A2+B2*DK2*C2 B2*CK2;
BK2*C2 AK2];
plCL2=eig(ACL2)
%------
figure(1)
subplot(121),dregion(alpha,0,r,th,r*[-1,1,-1,1])
plot(real(plCL1),imag(plCL1),'*')
subplot(122), dregion(alpha,0,r,th,r*[-1,1,-1,1])
plot(real(plCL2),imag(plCL2),'*')
%-----
prange=OMmax-OMmin; pmax=OMmax; pmin=OMmin;
%sim("SPIN_of_gs")
sim("SPIN_of_gs_2015a")
%-----
function LMIs=of_synlmi7(A1,A2,B1,B2,C1,C2,D11,D12,D21,D22,alpha,r,th)
[n,m]=size(B2); [p,n]=size(C2);
setlmis([]);
gam=lmivar(1,[1 0]);
[R,xxx,Rdec]=lmivar(1,[n 1]);
[S,xxx,Sdec]=lmivar(1,[n 1]);
Ak1=lmivar(2,[n n]);
Bk1=lmivar(2,[n p]);
Ck1=lmivar(2,[m n]);
Dk1=lmivar(2,[m p]);
Ak2=lmivar(2,[n n]);
Bk2=lmivar(2,[n p]);
Ck2=lmivar(2,[m n]);
Dk2=lmivar(2,[m p]);
%=====
lmiRS1=newlmi;
lmiterm([lmiRS1 1 1 R],A1,1,'s'); %#1:R*A'+AR
lmiterm([lmiRS1 1 1 Ck1],B2,1,'s'); %#1:Ck'*B2'+B2*Ck
lmiterm([lmiRS1 2 1 0],A1'); %#1:A'
lmiterm([lmiRS1 2 1 Ak1],1,1); %#1:Ak
lmiterm([lmiRS1 2 1 -Dk1],C2',B2'); %#1:C2'*Dk'*B2'
lmiterm([lmiRS1 2 2 S],1,A1,'s'); %#1:A'*S+S*A
lmiterm([lmiRS1 2 2 Bk1],1,C2,'s'); %#1:C2'*Bk'+Bk*C2
lmiterm([lmiRS1 1 3 0],B1); %#1:B1
lmiterm([lmiRS1 1 3 Dk1],B2,D21); %#1:B2*Dk*D21
lmiterm([lmiRS1 2 3 S],1,B1); %#1:S*B1
lmiterm([lmiRS1 2 3 Bk1],1,D21); %#1:Bk*D21
lmiterm([lmiRS1 3 3 gam],-1,1); %#1:-gam
lmiterm([lmiRS1 4 1 R],C1,1); %#1:C1*R
lmiterm([lmiRS1 4 1 Ck1],D12,1); %#1:D12*Ck
lmiterm([lmiRS1 4 2 0],C1); %#1:C1
lmiterm([lmiRS1 4 2 Dk1],D12,C2); %#1:D12*Dk*C2
lmiterm([lmiRS1 4 3 0],D11); %#1:D11
lmiterm([lmiRS1 4 3 Dk1],D12,D21); %#1:D12*Dk*D21
lmiterm([lmiRS1 4 4 gam],-1,1); %#1:-gam
%-----
lmiPL11=newlmi;
lmiterm([lmiPL11 1 1 R],A1,1,'s'); %#2:R*A'+A*R
lmiterm([lmiPL11 1 1 Ck1],B2,1,'s'); %#2:Ck'*B2'+B2*Ck
lmiterm([lmiPL11 2 1 Ak1],1,1); %#2:Ak
lmiterm([lmiPL11 1 2 0],A1); %#2:A
lmiterm([lmiPL11 1 2 Dk1],B2,C2); %#2:B2*Dk*C2
lmiterm([lmiPL11 2 2 S],1,A1,'s'); %#2:A'*S+S*A
lmiterm([lmiPL11 2 2 Bk1],1,C2,'s'); %#2:C2'*Bk'+Bk*C2
%
lmiterm([lmiPL11 1 1 R],2*alpha,1); %#2:2*alpha*R
lmiterm([lmiPL11 2 1 0],2*alpha); %#2:2*alpha*I
lmiterm([lmiPL11 2 2 S],2*alpha,1); %#2:2*alpha*S
%-----
lmiPL21=newlmi;
lmiterm([lmiPL21 1 1 R],-r,1); %#3:-r*R
lmiterm([lmiPL21 2 1 0],-r); %#3:-r*I
lmiterm([lmiPL21 2 2 S],-r,1); %#3:-r*S
%
lmiterm([lmiPL21 1 3 R],A1,1); %#3:A*R
lmiterm([lmiPL21 1 3 Ck1],B2,1); %#3:B2*Ck
lmiterm([lmiPL21 2 3 Ak1],1,1); %#3:Ak
lmiterm([lmiPL21 1 4 0],A1); %#3:A
lmiterm([lmiPL21 1 4 Dk1],B2,C2); %#3:B2*Dk*C2
lmiterm([lmiPL21 2 4 S],1,A1); %#3:S*A
lmiterm([lmiPL21 2 4 Bk1],1,C2); %#3:Bk*C2
%
lmiterm([lmiPL21 3 3 R],-r,1); %#3:-r*R
lmiterm([lmiPL21 4 3 0],-r); %#3:-r*I
lmiterm([lmiPL21 4 4 S],-r,1); %#3:-r*S
%-----
sth=sin(th); cth=cos(th);
lmiPL31=newlmi;
lmiterm([lmiPL31 1 1 R],sth*A1,1,'s'); %#4:sth*(R*A'+A*R)
lmiterm([lmiPL31 1 1 Ck1],sth*B2,1,'s');%#4:sth*(Ck'*B2'+B2*Ck)
lmiterm([lmiPL31 2 1 Ak1],sth,1); %#4:sth*(Ak)
lmiterm([lmiPL31 1 2 0],sth*A1); %#4:sth*(A)
lmiterm([lmiPL31 1 2 Dk1],sth*B2,C2); %#4:sth*(B2*Dk*C2)
lmiterm([lmiPL31 2 2 S],1,sth*A1,'s'); %#4:sth*(A'*S+S*A)
lmiterm([lmiPL31 2 2 Bk1],1,sth*C2,'s');%#4:sth*(C2'*Bk'+Bk*C2)
%
lmiterm([lmiPL31 1 3 R],cth*A1,1); %#1:cth*(A*R)
lmiterm([lmiPL31 1 3 R],1,-cth*A1'); %#1:cth*(-R*A')
lmiterm([lmiPL31 1 3 Ck1],cth*B2,1); %#1:cth*(B*Ck)
lmiterm([lmiPL31 1 3 -Ck1],-cth*B2',1); %#1:cth*(-Ck'*B')
lmiterm([lmiPL31 2 3 Ak1],cth,1); %#4:cth*(Ak)
lmiterm([lmiPL31 1 4 -Ak1],-cth,1); %#4:cth*(-Ak')
lmiterm([lmiPL31 1 4 0],A1); %#4:cth*(A)
lmiterm([lmiPL31 2 3 0],-A1'); %#4:cth*(-A')
lmiterm([lmiPL31 1 4 Dk1],cth*B2,C2); %#4:cth*(B2*Dk*C2)
lmiterm([lmiPL31 2 3 -Dk1],-cth*C2',B2');%#4:cth*(-C2'*Dk'*B2')
lmiterm([lmiPL31 2 4 S],1,cth*A1); %#4:cth*(S*A)
lmiterm([lmiPL31 2 4 S],-cth*A1',1); %#4:cth*(-A'*S)
lmiterm([lmiPL31 2 4 Bk1],1,cth*C2); %#4:cth*(Bk*C2)
lmiterm([lmiPL31 2 4 -Bk1],-cth*C2',1); %#4:cth*(-C2'*Bk')
%
lmiterm([lmiPL31 3 3 R],sth*A1,1,'s'); %#4:sth*(R*A'+A*R)
lmiterm([lmiPL31 3 3 Ck1],sth*B2,1,'s');%#4:sth*(Ck'*B2'+B2*Ck)
lmiterm([lmiPL31 4 3 Ak1],sth,1); %#4:sth*(Ak)
lmiterm([lmiPL31 3 4 0],sth*A1); %#4:sth*(A)
lmiterm([lmiPL31 3 4 Dk1],sth*B2,C2); %#4:sth*(B2*Dk*C2)
lmiterm([lmiPL31 4 4 S],1,sth*A1,'s'); %#4:sth*(A'*S+S*A)
lmiterm([lmiPL31 4 4 Bk1],1,sth*C2,'s');%#4:sth*(C2'*Bk'+Bk*C2)
%=====
lmiRS2=newlmi;
lmiterm([lmiRS2 1 1 R],A2,1,'s'); %#1:R*A'+AR
lmiterm([lmiRS2 1 1 Ck2],B2,1,'s'); %#1:Ck'*B2'+B2*Ck
lmiterm([lmiRS2 2 1 0],A2'); %#1:A'
lmiterm([lmiRS2 2 1 Ak2],1,1); %#1:Ak
lmiterm([lmiRS2 2 1 -Dk2],C2',B2'); %#1:C2'*Dk'*B2'
lmiterm([lmiRS2 2 2 S],1,A2,'s'); %#1:A'*S+S*A
lmiterm([lmiRS2 2 2 Bk2],1,C2,'s'); %#1:C2'*Bk'+Bk*C2
lmiterm([lmiRS2 1 3 0],B1); %#1:B1
lmiterm([lmiRS2 1 3 Dk2],B2,D21); %#1:B2*Dk*D21
lmiterm([lmiRS2 2 3 S],1,B1); %#1:S*B1
lmiterm([lmiRS2 2 3 Bk2],1,D21); %#1:Bk*D21
lmiterm([lmiRS2 3 3 gam],-1,1); %#1:-gam
lmiterm([lmiRS2 4 1 R],C1,1); %#1:C1*R
lmiterm([lmiRS2 4 1 Ck2],D12,1); %#1:D12*Ck
lmiterm([lmiRS2 4 2 0],C1); %#1:C1
lmiterm([lmiRS2 4 2 Dk2],D12,C2); %#1:D12*Dk*C2
lmiterm([lmiRS2 4 3 0],D11); %#1:D11
lmiterm([lmiRS2 4 3 Dk2],D12,D21); %#1:D12*Dk*D21
lmiterm([lmiRS2 4 4 gam],-1,1); %#1:-gam
%-----
lmiPL12=newlmi;
lmiterm([lmiPL12 1 1 R],A2,1,'s'); %#2:R*A'+A*R
lmiterm([lmiPL12 1 1 Ck2],B2,1,'s'); %#2:Ck'*B2'+B2*Ck
lmiterm([lmiPL12 2 1 Ak2],1,1); %#2:Ak
lmiterm([lmiPL12 1 2 0],A2); %#2:A
lmiterm([lmiPL12 1 2 Dk2],B2,C2); %#2:B2*Dk*C2
lmiterm([lmiPL12 2 2 S],1,A2,'s'); %#2:A'*S+S*A
lmiterm([lmiPL12 2 2 Bk2],1,C2,'s'); %#2:C2'*Bk'+Bk*C2
%
lmiterm([lmiPL12 1 1 R],2*alpha,1); %#2:2*alpha*R
lmiterm([lmiPL12 2 1 0],2*alpha); %#2:2*alpha*I
lmiterm([lmiPL12 2 2 S],2*alpha,1); %#2:2*alpha*S
%-----
lmiPL22=newlmi;
lmiterm([lmiPL22 1 1 R],-r,1); %#3:-r*R
lmiterm([lmiPL22 2 1 0],-r); %#3:-r*I
lmiterm([lmiPL22 2 2 S],-r,1); %#3:-r*S
%
lmiterm([lmiPL22 1 3 R],A2,1); %#3:A*R
lmiterm([lmiPL22 1 3 Ck2],B2,1); %#3:B2*Ck
lmiterm([lmiPL22 2 3 Ak2],1,1); %#3:Ak
lmiterm([lmiPL22 1 4 0],A2); %#3:A
lmiterm([lmiPL22 1 4 Dk2],B2,C2); %#3:B2*Dk*C2
lmiterm([lmiPL22 2 4 S],1,A2); %#3:S*A
lmiterm([lmiPL22 2 4 Bk2],1,C2); %#3:Bk*C2
%
lmiterm([lmiPL22 3 3 R],-r,1); %#3:-r*R
lmiterm([lmiPL22 4 3 0],-r); %#3:-r*I
lmiterm([lmiPL22 4 4 S],-r,1); %#3:-r*S
%-----
sth=sin(th); cth=cos(th);
lmiPL32=newlmi;
lmiterm([lmiPL32 1 1 R],sth*A2,1,'s'); %#4:sth*(R*A'+A*R)
lmiterm([lmiPL32 1 1 Ck2],sth*B2,1,'s');%#4:sth*(Ck'*B2'+B2*Ck)
lmiterm([lmiPL32 2 1 Ak2],sth,1); %#4:sth*(Ak)
lmiterm([lmiPL32 1 2 0],sth*A2); %#4:sth*(A)
lmiterm([lmiPL32 1 2 Dk2],sth*B2,C2); %#4:sth*(B2*Dk*C2)
lmiterm([lmiPL32 2 2 S],1,sth*A2,'s'); %#4:sth*(A'*S+S*A)
lmiterm([lmiPL32 2 2 Bk2],1,sth*C2,'s');%#4:sth*(C2'*Bk'+Bk*C2)
%
lmiterm([lmiPL32 1 3 R],cth*A2,1); %#1:cth*(A*R)
lmiterm([lmiPL32 1 3 R],1,-cth*A2'); %#1:cth*(-R*A')
lmiterm([lmiPL32 1 3 Ck2],cth*B2,1); %#1:cth*(B*Ck)
lmiterm([lmiPL32 1 3 -Ck2],-cth*B2',1); %#1:cth*(-Ck'*B')
lmiterm([lmiPL32 2 3 Ak2],cth,1); %#4:cth*(Ak)
lmiterm([lmiPL32 1 4 -Ak2],-cth,1); %#4:cth*(-Ak')
lmiterm([lmiPL32 1 4 0],A2); %#4:cth*(A)
lmiterm([lmiPL32 2 3 0],-A2'); %#4:cth*(-A')
lmiterm([lmiPL32 1 4 Dk2],cth*B2,C2); %#4:cth*(B2*Dk*C2)
lmiterm([lmiPL32 2 3 -Dk2],-cth*C2',B2');%#4:cth*(-C2'*Dk'*B2')
lmiterm([lmiPL32 2 4 S],1,cth*A2); %#4:cth*(S*A)
lmiterm([lmiPL32 2 4 S],-cth*A2',1); %#4:cth*(-A'*S)
lmiterm([lmiPL32 2 4 Bk2],1,cth*C2); %#4:cth*(Bk*C2)
lmiterm([lmiPL32 2 4 -Bk2],-cth*C2',1); %#4:cth*(-C2'*Bk')
%
lmiterm([lmiPL32 3 3 R],sth*A2,1,'s'); %#4:sth*(R*A'+A*R)
lmiterm([lmiPL32 3 3 Ck2],sth*B2,1,'s');%#4:sth*(Ck'*B2'+B2*Ck)
lmiterm([lmiPL32 4 3 Ak2],sth,1); %#4:sth*(Ak)
lmiterm([lmiPL32 3 4 0],sth*A2); %#4:sth*(A)
lmiterm([lmiPL32 3 4 Dk2],sth*B2,C2); %#4:sth*(B2*Dk*C2)
lmiterm([lmiPL32 4 4 S],1,sth*A2,'s'); %#4:sth*(A'*S+S*A)
lmiterm([lmiPL32 4 4 Bk2],1,sth*C2,'s');%#4:sth*(C2'*Bk'+Bk*C2)
%=====
posX=-newlmi;
lmiterm([posX 1 1 R],1,1); %#5:R
lmiterm([posX 2 1 0],1); %#5:I
lmiterm([posX 2 2 S],1,1); %#5:S
%-----
lmiDk1=-newlmi;
lmiterm([lmiDk1 1 1 0],1e2); %#6:1e2
lmiterm([lmiDk1 2 2 0],1e2); %#6:1e2
lmiterm([lmiDk1 2 1 Dk1],1,1); %#6:Dk
%-----
lmiDk2=-newlmi;
lmiterm([lmiDk2 1 1 0],1e2); %#6:1e2
lmiterm([lmiDk2 2 2 0],1e2); %#6:1e2
lmiterm([lmiDk2 2 1 Dk2],1,1); %#6:Dk
%-----
lmig=newlmi;
lmiterm([lmig,1,1,gam],1,1); %#7:gam
lmiterm([lmig,1,1,0],-1e3); %#7:1e3
LMIs=getlmis;
end
%-----
%eof
|
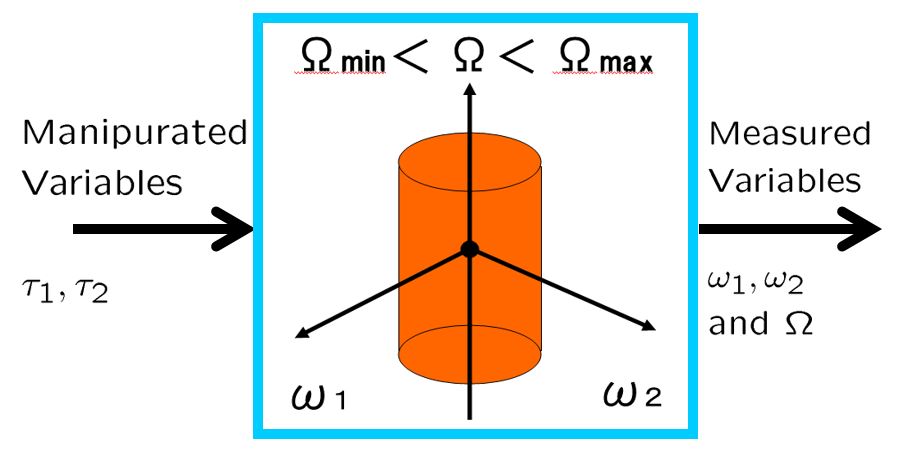


![\displaystyle{(3) \underbrace{ \left[\begin{array}{c} \dot{\omega}_1(t) \\ \dot{\omega}_2(t) \end{array}\right] }_{\dot{x}(t)} = \underbrace{ \left[\begin{array}{cc} 0 & \Omega(t)\frac{J_2-J_3}{J_1} \\ -\Omega(t)\frac{J_3-J_1}{J_2} & 0 \end{array}\right] }_{A(\Omega(t))} \underbrace{ \left[\begin{array}{c} \omega_1(t) \\ \omega_2(t) \end{array}\right] }_{x(t)} + \underbrace{ \left[\begin{array}{cc} \frac{1}{J_1} & 0 \\ 0 & \frac{1}{J_2} \end{array}\right] }_{B} \underbrace{ \left[\begin{array}{c} \tau_1(t) \\ \tau_2(t) \end{array}\right] }_{u(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-359a3b72faaf2d0a5cfc50d11ff3e826_l3.png "Rendered by QuickLaTeX.com")
 は次式で表されることに着目します。
は次式で表されることに着目します。


 によって重み付けて
によって重み付けて

 によって重み付けた
によって重み付けた
![\displaystyle{(10)\quad \begin{array}{l} \left[\begin{array}{c} \dot{x}(t) \\ \dot{x}_K(t) \end{array}\right] =(p_1(\Omega(t)) \underbrace{ \left[\begin{array}{ccc} A_1+BD_{K1}C & BC_{K1} \\ B_{K1}C & A_{K1} \end{array}\right] }_{A_{CL1}}\\ +p_2(\Omega(t)) \underbrace{ \left[\begin{array}{ccc} A_2+BD_{K2}C & BC_{K2} \\ B_{K2}C & A_{K2} \end{array}\right] }_{A_{CL2}} )\left[\begin{array}{c} x(t) \\ x_K(t) \end{array}\right]\\ =\underbrace{(p_1(\Omega(t))A_{CL1} +p_2(\Omega(t))A_{CL2} )}_{A_{CL}(\Omega(t))} \left[\begin{array}{c} x(t) \\ x_K(t) \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8f0a038fe6a7bd2f5966695bcc3f718d_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(11)\quad \begin{array}{l} \left[\begin{array}{c} \dot{x}(t) \\ \dot{x}_K(t) \end{array}\right] = \underbrace{ \left[\begin{array}{ccc} A_1+BD_{K1}C & BC_{K1} \\ B_{K1}C & A_{K1} \end{array}\right] }_{A_{CL1}} \left[\begin{array}{c} x(t) \\ x_K(t) \end{array}\right]\\ \left[\begin{array}{c} \dot{x}(t) \\ \dot{x}_K(t) \end{array}\right] = \underbrace{ \left[\begin{array}{ccc} A_2+BD_{K2}C & BC_{K2} \\ B_{K2}C & A_{K1} \end{array}\right] }_{A_{CL2}} \left[\begin{array}{c} x(t) \\ x_K(t) \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e929ace4619cad2d177f258d9889a3c9_l3.png "Rendered by QuickLaTeX.com")
 次系を考えます。混乱を避けるため、
次系を考えます。混乱を避けるため、 、
、 と記法を改めたことに注意してください。
と記法を改めたことに注意してください。![\displaystyle{(12)\quad P: \left\{\begin{array}{l} \dot{x}(t)=\underbrace{(p_1(\Omega(t))A^{(1)}+p_2(\Omega(t))A^{(2)})}_{A(\Omega(t))}x(t)+B_1u_1(t)+B_2u_2(t) \\ \underbrace{ \left[\begin{array}{c} y(t)\\ u(t) \end{array}\right] }_{y_1(t)} = \underbrace{ \left[\begin{array}{c} C\\ 0 \end{array}\right] }_{C_1} x(t)+ \underbrace{ \left[\begin{array}{c} 0\\ 0 \end{array}\right] }_{D_{11}}u_1(t)+ \underbrace{ \left[\begin{array}{c} 0\\ I \end{array}\right] }_{D_{12}} u_2(t) \\ y_2(t)=C_2x(t) \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-faeda20d9d519080ed5b8cd13b046c7d_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{(14)\quad P_{CL}: \left\{\begin{array}{l} \left[\begin{array}{c} \dot{x}(t) \\ \dot{x}_K(t) \end{array}\right] =\underbrace{(p_1(\Omega(t))A_{CL1} +p_2(\Omega(t))A_{CL2} )}_{A_{CL}(\Omega(t))} \left[\begin{array}{c} x(t) \\ x_K(t) \end{array}\right]\\ + \underbrace{ \left[\begin{array}{ccc} B_1 \\ 0 \end{array}\right] }_{B_{CL}} u_1(t)\\ y_1(t) = \underbrace{ \left[\begin{array}{ccc} C_1+D_{12}D_KC_2 & D_{12}C_K \end{array}\right] }_{C_{CL}} \left[\begin{array}{c} x(t) \\ x_K(t) \end{array}\right] \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-69093e258ea748ec8d4c740f25b24bcf_l3.png "Rendered by QuickLaTeX.com")
 ゲインが
ゲインが より小、すなわち
より小、すなわち
 制御(出力フィードバック)を共通のリャプノフ関数をもつように解きます。その際コントローラの実装上の立場から、各端点において
制御(出力フィードバック)を共通のリャプノフ関数をもつように解きます。その際コントローラの実装上の立場から、各端点において
 subject to
subject to
![\displaystyle{(16) \begin{array}{l} \left[\begin{array}{cc} R & I \\ I & S \end{array}\right] >0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ae3acf89dc0d855d527a3eb71d77cdac_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(17) \left[\begin{array}{ccc} \left[\begin{array}{cc} A^{(1)}R+B_2{\cal C}_K^{(1)} & A^{(1)}+B_2D_K^{(1)}C_2\\ {\cal A}_K^{(1)} & SA^{(1)}+{\cal B}_K^{(1)}C_2 \end{array}\right]+(*)^T & \left[\begin{array}{c} B_1+B_2D_K^{(1)}D_{21} \\ SB_1+{\cal B}_K^{(1)}D_{21} \end{array}\right] & (*)^T \\ (*)^T & -\gamma I & (*)^T \\ \left[\begin{array}{cc} C_1R+D_{12}{\cal C}_K^{(1)} & C_1+D_{12}D_K^{(1)}C_2 \end{array}\right] & D_{11} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0c84c35e2434d968a27708396729788c_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(18) \begin{array}{l} \left[\begin{array}{cc} A^{(1)}R+B_2{\cal C}_K^{(1)} & A^{(1)}+B_2D_K^{(1)}C_2\\ {\cal A}_K^{(1)} & SA^{(1)}+{\cal B}_K^{(1)}C_2 \end{array}\right] +(*)^T %\nonumber\\&& +\alpha \left[\begin{array}{cc} R & I \\ I & S \end{array}\right]<0} \\ \left[\begin{array}{cc} -r \left[\begin{array}{cc} R & I \\ I & S \end{array}\right] & \left[\begin{array}{cc} A^{(1)}R+B_2{\cal C}_K^{(1)} & A^{(1)}+B_2D_K^{(1)}C_2\\ {\cal A}_K^{(1)} & SA^{(1)}+{\cal B}_K^{(1)}C_2 \end{array}\right] \\ (*)^T & -r \left[\begin{array}{cc} R & I \\ I & S \end{array}\right] \end{array}\right] <0 \\ \left[\begin{array}{cc} \sin\theta & \cos\theta \\ -\cos\theta & \sin\theta \end{array}\right]\otimes \left[\begin{array}{cc} A^{(1)}R+B_2{\cal C}_K^{(1)} & A^{(1)}+B_2D_K^{(1)}C_2\\ {\cal A}_K^{(1)} & SA^{(1)}+{\cal B}_K^{(1)}C_2 \end{array}\right]+ (*)^T <0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-37825362e80092bdbffd30da63f679d5_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(19) \left[\begin{array}{ccc} \left[\begin{array}{cc} A^{(2)}R+B_2{\cal C}_K^{(2)} & A^{(2)}+B_2D_K^{(2)}C_2\\ {\cal A}_K^{(2)} & SA^{(2)}+{\cal B}_K^{(2)}C_2 \end{array}\right]+(*)^T & \left[\begin{array}{c} B_1+B_2D_K^{(2)}D_{21} \\ SB_1+{\cal B}_K^{(2)}D_{21} \end{array}\right] & (*)^T \\ (*)^T & -\gamma I & (*)^T \\ \left[\begin{array}{cc} C_1R+D_{12}{\cal C}_K^{(2)} & C_1+D_{12}D_K^{(2)}C_2 \end{array}\right] & D_{11} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1f48b4c8d9a8b75d6d691d094c20694a_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(20) \begin{array}{l} \left[\begin{array}{cc} A^{(2)}R+B_2{\cal C}_K^{(2)} & A^{(1)}+B_2D_K^{(2)}C_2\\ {\cal A}_K^{(2)} & SA^{(2)}+{\cal B}_K^{(2)}C_2 \end{array}\right] +(*)^T %\nonumber\\&& +\alpha \left[\begin{array}{cc} R & I \\ I & S \end{array}\right]<0} \\ \left[\begin{array}{cc} -r \left[\begin{array}{cc} R & I \\ I & S \end{array}\right] & \left[\begin{array}{cc} A^{(2)}R+B_2{\cal C}_K^{(2)} & A^{(2)}+B_2D_K^{(2)}C_2\\ {\cal A}_K^{(2)} & SA^{(2)}+{\cal B}_K^{(2)}C_2 \end{array}\right] \\ (*)^T & -r \left[\begin{array}{cc} R & I \\ I & S \end{array}\right] \end{array}\right] <0 \\ \left[\begin{array}{cc} \sin\theta & \cos\theta \\ -\cos\theta & \sin\theta \end{array}\right]\otimes \left[\begin{array}{cc} A^{(2)}R+B_2{\cal C}_K^{(2)} & A^{(2)}+B_2D_K^{(2)}C_2\\ {\cal A}_K^{(2)} & SA^{(2)}+{\cal B}_K^{(2)}C_2 \end{array}\right]+ (*)^T <0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e4f2f36e3876365a2a8058226ef8604d_l3.png "Rendered by QuickLaTeX.com")


![\displaystyle{(23)\quad \left[\begin{array}{ccc} Y_{CL}A_{CL1}^T+A_{CL1}Y_{CL} & B_{CL} & Y_{CL}C_{CL}^T \\ B_{CL}^T & -\gamma I & D_{CL}^T \\ C_{CL}Y_{CL} & D_{CL} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ae7b7271e03fda5eec4e707d46be1486_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(24)\quad \left[\begin{array}{ccc} Y_{CL}A_{CL2}^T+A_{CL2}Y_{CL} & B_{CL} & Y_{CL}C_{CL}^T \\ B_{CL}^T & -\gamma I & D_{CL}^T \\ C_{CL}Y_{CL} & D_{CL} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ebcd17b195f2caac772907fc0cd3745f_l3.png "Rendered by QuickLaTeX.com")
 を求めています。
を求めています。 ととれば
ととれば![\displaystyle{(25)\quad X_{CL}>0 \Leftrightarrow Y_{CL}>0 \Leftrightarrow \left[\begin{array}{cc} R & I \\ I & S \end{array}\right] >0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-579022f5529571e621b7c0e5017ecf95_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(26)\quad \left[\begin{array}{ccc} A_{CL1}^TX_{CL}+X_{CL}A_{CL1} & X_{CL}B_{CL} & C_{CL}^T \\ B_{CL}^TX_{CL} & -\gamma I & D_{CL}^T \\ C_{CL} & D_{CL} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-632d14c9b5efe00ba767e8f6195eb627_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(27)\quad \left[\begin{array}{ccc} A_{CL2}^TX_{CL}+X_{CL}A_{CL2} & X_{CL}B_{CL} & C_{CL}^T \\ B_{CL}^TX_{CL} & -\gamma I & D_{CL}^T \\ C_{CL} & D_{CL} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b21c8537a8ab0dfb4ea51a8573cb9bd9_l3.png "Rendered by QuickLaTeX.com")
 回転体のパラメータ変動を出力FBによるLPV制御で抑制したシミュレーションプログラムを以下に示す。これを実行し効果を確かめよ。
回転体のパラメータ変動を出力FBによるLPV制御で抑制したシミュレーションプログラムを以下に示す。これを実行し効果を確かめよ。
 回転体のパラメータ変動を出力FBによる
回転体のパラメータ変動を出力FBによる 制御で抑制したシミュレーションプログラムを以下に示す。これを実行し
制御で抑制したシミュレーションプログラムを以下に示す。これを実行し


 の近傍
の近傍 において、リャプノフ関数とよばれる
において、リャプノフ関数とよばれる

![\displaystyle{(4)\quad \underbrace{\left[\begin{array}{c} \dot{x}(t) \\ \dot{x}_K(t) \end{array}\right]}_{\dot{\bar x}(t)} =\underbrace{(p_1(\Omega(t))A_{CL1} +p_2(\Omega(t))A_{CL2} )}_{A_{CL}(\Omega(t))} \underbrace{\left[\begin{array}{c} x(t) \\ x_K(t) \end{array}\right]}_{\bar{x}(t)} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-284947643aa6c7bcefd9ca89f26c3ed9_l3.png "Rendered by QuickLaTeX.com")
 と
と を個別に安定行列としたとすると
を個別に安定行列としたとすると




 を見つけることができれば
を見つけることができれば

![\displaystyle{(12)\quad P_{CL}: \left\{\begin{array}{l} \underbrace{\left[\begin{array}{c} \dot{x}(t) \\ \dot{x}_K(t) \end{array}\right]}_{\dot{\bar x}(t)} =\underbrace{(p_1(\Omega(t))A_{CL1} +p_2(\Omega(t))A_{CL2} )}_{A_{CL}(\Omega(t))} \underbrace{\left[\begin{array}{c} x(t) \\ x_K(t) \end{array}\right]}_{\bar{x}(t)}\\ + \underbrace{ \left[\begin{array}{ccc} B_1 \\ 0 \end{array}\right] }_{B_{CL}} u_1(t)\\ y_1(t) = \underbrace{ \left[\begin{array}{ccc} C_1+D_{12}D_KC_2 & D_{12}C_K \end{array}\right] }_{C_{CL}} \underbrace{\left[\begin{array}{c} x(t) \\ x_K(t) \end{array}\right]}_{\bar{x}(t)} \end{array}\right. }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7859b8904bfe69d3d2462b52727df585_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(13)\quad \exists X_1>0:\ \left[\begin{array}{ccc} A_{CL1}^TX_1+X_1A_{CL1} & X_1B_{CL} & C_{CL}^T \\ B_{CL}^TX_1 & -\gamma I & D_{CL}^T \\ C_{CL} & D_{CL} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-32121ac6448169e2c1b3ad70a6d1b8a1_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(14)\quad \exists X_2>0:\ \left[\begin{array}{ccc} A_{CL2}^TX_2+X_2A_{CL2} & X_2B_{CL} & C_{CL}^T \\ B_{CL}^TX_2 & -\gamma I & D_{CL}^T \\ C_{CL} & D_{CL} & -\gamma I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7dc86f448009472a06f5937161eabf0f_l3.png "Rendered by QuickLaTeX.com")
 が求まっているとしますと
が求まっているとしますと![\displaystyle{(15)\quad \left[\begin{array}{ccc} A_{CL1}^TX+XA_{CL1} & XB_{CL} & C_{CL}^T \\ B_{CL}^TX & -\gamma^2 I & D_{CL}^T \\ C_{CL} & D_{CL} &-I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0551f956ef678d8456cd257070a5515a_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \Leftrightarrow \left[\begin{array}{cc} A_{CL1}^TX+XA_{CL1} & XB_{CL} \\ B_{CL}^TX & 0 \end{array}\right] < \left[\begin{array}{cc} C_{CL}^T & 0 \\ D_{CL}^T & I \end{array}\right] \left[\begin{array}{cc} -I & 0 \\ 0 & \gamma^2 I \end{array}\right] \left[\begin{array}{cc} C_{CL} & D_{CL} \\ 0 & I \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6f9e700e52852a4ccfd431c556f196b3_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(16)\quad \left[\begin{array}{ccc} A_{CL1}^TX+XA_{CL1} & XB & C_{CL}^T \\ B_{CL}^TX & -\gamma^2 I & D_{CL}^T \\ C_{CL} & D_{CL} &-I \end{array}\right]<0 }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-182eed5588e5439f1a4fe8ccf23de8f8_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ \Leftrightarrow \left[\begin{array}{cc} A_{CL2}^TX+XA_{CL2} & XB_{CL} \\ B_{CL}^TX & 0 \end{array}\right] < \left[\begin{array}{cc} C_{CL}^T & 0 \\ D_{CL}^T & I \end{array}\right] \left[\begin{array}{cc} -I & 0 \\ 0 & \gamma^2 I \end{array}\right] \left[\begin{array}{cc} C_{CL} & D_{CL} \\ 0 & I \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a0ad6118d7c899a3f5ae3fd8abfb3c8b_l3.png "Rendered by QuickLaTeX.com")

![\displaystyle{ \left[\begin{array}{c} \bar{x}(t) \\ u_1(t) \end{array}\right]^T \left[\begin{array}{cc} \begin{array}{c} ( p_1(\Omega(t))A_{CL1}+p_2(\Omega(t))A_{CL2} )^TX\\ +X( p_1(\Omega(t))A_{CL1}+p_2(\Omega(t))A_{CL2} ) \end{array} & XB_{CL} \\ B_{CL}^TX & 0 \end{array}\right] \left[\begin{array}{c} \bar{x}(t) \\ u_1(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-21fd65935890040936a03e1381b689d0_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ =p_1(\Omega(t)) \left[\begin{array}{c} \bar{x}(t) \\ u_1(t) \end{array}\right]^T \left[\begin{array}{cc} A_{CL1}^TX+XA_{CL1} & XB_{CL} \\ B_{CL}^TX & 0 \end{array}\right] \left[\begin{array}{c} \bar{x}(t) \\ u_1(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c9c730dfd372a7a2fa9b55efc6242f43_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ +p_2(\Omega(t)) \left[\begin{array}{c} \bar{x}(t) \\ u_1(t) \end{array}\right]^T \left[\begin{array}{cc} A_{CL2}^TX+XA_{CL2} & XB_{CL} \\ B_{CL}^TX & 0 \end{array}\right] \left[\begin{array}{c} \bar{x}(t) \\ u_1(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7bb04dba702200d63225e6905e0265c4_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{ < \underbrace{(p_1(\Omega(t))+p_2(\Omega(t)))}_1 \left[\begin{array}{c} \bar{x}(t) \\ u_1(t) \end{array}\right]^T \left[\begin{array}{cc} C_{CL} & D_{CL} \\ 0 & I \end{array}\right]^T \left[\begin{array}{cc} - I & 0 \\ 0 & \gamma^2 I \end{array}\right] \left[\begin{array}{cc} C_{CL} & D_{CL} \\ 0 & I \end{array}\right] \left[\begin{array}{c} \bar{x}(t) \\ u_1(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-efc3ed3c7e49e14825f76189803962fc_l3.png "Rendered by QuickLaTeX.com")


