α制約LMI…Homework
[0] 自由系 が漸近安定であるための必要十分条件は、行列
が漸近安定であるための必要十分条件は、行列 の固有値がすべて複素左平面
の固有値がすべて複素左平面 に存在することでした。でも平衡状態
に存在することでした。でも平衡状態 に復帰するその過程はいつも好ましいとは言えません。たとえば、平衡状態に復帰する速さが適切であること、その過程が振動的でないこと、そして適切なサンプリング周期をもつ(絶対値が極端に大きな固有値をもたない)ことが必要です。そこで行列の固有値が含まれる望ましい領域
に復帰するその過程はいつも好ましいとは言えません。たとえば、平衡状態に復帰する速さが適切であること、その過程が振動的でないこと、そして適切なサンプリング周期をもつ(絶対値が極端に大きな固有値をもたない)ことが必要です。そこで行列の固有値が含まれる望ましい領域
![\[\lambda(A)\subset{\cal D}\subset{\rm\bf LHP}\]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-a19919666234e166eff0f7a3abd65698_l3.png "Rendered by QuickLaTeX.com")
を考え、そのための条件を線形行列不等式 (Linear Matrix Inequality)で表します。
(Linear Matrix Inequality)で表します。
●準備として、次の命題をチェックします。
![\displaystyle{(1)\quad \begin{array}{lll} && \left[\begin{array}{cc} P & M \\ M^T & Q \end{array}\right]<0\\ &\Leftrightarrow& P-MQ^{-1}M^T<0,\ Q<0\\ &\Leftrightarrow& P<0,\ Q-M^TP^{-1}M<0 \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-1032be1b5ca3689d43f86d220f3f031c_l3.png "Rendered by QuickLaTeX.com") |
ここに出てくる または
または はシュール補元(Shure Complement)と呼ばれています。
はシュール補元(Shure Complement)と呼ばれています。
実際、次のように示されます。
![\displaystyle{(2)\quad \begin{array}{lll} & & \underbrace{ \left[\begin{array}{cc} P & M \\ M^T & Q \end{array}\right] }_{R} \\ &=& \left[\begin{array}{cc} I & MQ^{-1} \\ 0 & I \end{array}\right] \left[\begin{array}{cc} P-MQ^{-1}M^T & 0 \\ 0 & Q \end{array}\right] \left[\begin{array}{cc} I & 0 \\ Q^{-1}M^T & I \end{array}\right] \\ &=& \underbrace{ \left[\begin{array}{cc} I & 0 \\ M^TP^{-1} & I \end{array}\right] }_{T^T} \underbrace{ \left[\begin{array}{cc} P & 0 \\ 0 & Q-M^TP^{-1}M \end{array}\right] }_{S} \underbrace{ \left[\begin{array}{cc} I & P^{-1}M \\ 0 & I \end{array}\right] }_{T} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c71f6a58283e2c1b2186c86022be5b68_l3.png "Rendered by QuickLaTeX.com")
これから

を得て、次が成り立ちます。

[1] 次の領域 を考えます。
を考えます。
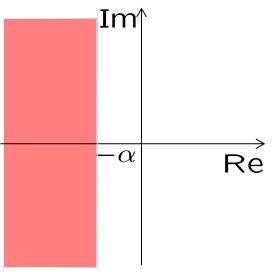
図1 領域
このとき、次の命題が成り立ちます。
 |
●実際、まず領域が上図を表すことは、次のように確かめられます。

●次に、十分性は、 とすると、次のように確かめられます(*は複素共役)。
とすると、次のように確かめられます(*は複素共役)。

さらに、 とおくと、次が成り立ちます。
とおくと、次が成り立ちます。

必要性については、あとで述べます。
演習B11…Flipped Classroom
 α制約を調べる次のコードを説明せよ。
α制約を調べる次のコードを説明せよ。
| MATLAB |
|
Note B11 Inversion Lemma
![\displaystyle{(1)\quad \left[\begin{array}{cc} M_{11} & M_{12} \\ M_{21} & M_{22} \end{array}\right] = \left[\begin{array}{cc} I & M_{12}M_{22}^{-1} \\ 0 & I \end{array}\right] \left[\begin{array}{cc} M_{11}-M_{12}M_{22}^{-1}M_{21} & 0 \\ 0 & M_{22} \end{array}\right] \left[\begin{array}{cc} I & 0 \\ M_{22}^{-1}M_{21} & I \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-9ea5cb82284f1cc6c47e4d68fea1fa42_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(2)\quad \left[\begin{array}{cc} M_{11} & M_{12} \\ M_{21} & M_{22} \end{array}\right]^{-1} = \left[\begin{array}{cc} \Phi^{-1} & -\Phi^{-1}M_{12}M_{22}^{-1} \\ -M_{22}^{-1}M_{21}\Phi^{-1} & M_{22}^{-1}+M_{22}^{-1}M_{21}\Phi^{-1}M_{12}M_{22}^{-1} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-689510f7239f2480185a3a362051840c_l3.png "Rendered by QuickLaTeX.com")

および
![\displaystyle{(4)\quad \left[\begin{array}{cc} M_{11} & M_{12} \\ M_{21} & M_{22} \end{array}\right] = \left[\begin{array}{cc} I & 0 \\ M_{21}M_{11}^{-1} & I \end{array}\right] \left[\begin{array}{cc} M_{11} & 0 \\ 0 & M_{22}-M_{21}M_{11}^{-1}M_{12} \end{array}\right] \left[\begin{array}{cc} I & M_{11}^{-1}M_{12} \\ 0 & I \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b302f0ab53ad24afb5435b50b50c2ac9_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(5)\quad \left[\begin{array}{cc} M_{11} & M_{12} \\ M_{21} & M_{22} \end{array}\right]^{-1} = \left[\begin{array}{cc} M_{11}^{-1}+M_{11}^{-1}M_{12}\Psi^{-1}M_{21}M_{11}^{-1} & -M_{11}^{-1}M_{12}\Psi^{-1} \\ -\Psi^{-1}M_{21}M_{11}^{-1} & \Psi^{-1} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-8b9176cb77f72eccf7eda252f067e7e5_l3.png "Rendered by QuickLaTeX.com")

が成り立つことから、次を得ます。


特に、次が成り立ちます。
