LQGI制御…Homework
[1] 可制御かつ可観測な 次系を考えます。
次系を考えます。


ここで、状態方程式には、操作入力 のほかに、定値外乱
のほかに、定値外乱 が加わっていること、出力方程式における行列
が加わっていること、出力方程式における行列 を
を と書いたことに注意します。いま、出力変数の一部やそれらの組合せからなる新しい
と書いたことに注意します。いま、出力変数の一部やそれらの組合せからなる新しい 個の被制御変数を
個の被制御変数を

のように選び( は可観測対)、定値外乱があるにも拘わらず、制御目的
は可観測対)、定値外乱があるにも拘わらず、制御目的

を達成したいとします。ここで、定数ベクトル は個の設定値からなる。もし制御目的(4)が物理的に可能とすると、ある状態
は個の設定値からなる。もし制御目的(4)が物理的に可能とすると、ある状態 と入力
と入力 が確定し
が確定し
![\displaystyle{(5)\quad \left[\begin{array}{c} -w \\ r \end{array}\right] = \left[\begin{array}{cc} A & B \\ C & 0 \end{array}\right] \left[\begin{array}{c} x_\infty \\ u_\infty \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e09001e93847b23ee91cae7e67f2ffe7_l3.png "Rendered by QuickLaTeX.com")
の関係を満足しているはずです。したがって、どのようなとに対しても、とが定まるように、被制御変数(3)を
![\displaystyle{(6)\quad {\rm rank}\, \underbrace{ \left[\begin{array}{cc} A & B \\ C & 0 \end{array}\right] }_{S}=n+m }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2069deace994eb41f10ff0a9f788d3e6_l3.png "Rendered by QuickLaTeX.com")
が成り立つように選ぶものとします。
●さて、制御目的(4)を達成するために、つぎの積分動作を加えた状態フィードバックを考えました。

ただし

実際には、式(7)の代わりに、状態オブザーバ

の出力を用いて

を実施することになります。ここでの積分動作を加えたオブザーバベース コントローラは、(10)を(9)に代入した

と、(8)を合わせて、つぎのように表されます。
![\displaystyle{(12)\quad \boxed{\begin{array}{rl} \left[\begin{array}{c} \dot{\hat{x}}(t) \\ \dot{x}_I(t) \end{array}\right] =& \underbrace{ \left[\begin{array}{cc} A-HC_M-BF & -BF_I \\ 0 & 0 \end{array}\right] }_{A_K} \left[\begin{array}{c} \hat{x}(t) \\ x_I(t) \end{array}\right]\\[10mm] &+ \underbrace{ \left[\begin{array}{cc} H & 0\\ C_S & -I_m \end{array}\right] }_{B_K} \left[\begin{array}{c} y(t) \\ r \end{array}\right] \end{array}} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-977bf81afcea851483203c10814c5622_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(13)\quad \boxed{u(t)= \underbrace{- \left[\begin{array}{cc} F & F_I \end{array}\right] }_{C_K} \left[\begin{array}{c} \hat{x}(t) \\ x_I(t) \end{array}\right]} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-d9ac340745aed0b88493ebd6fef302af_l3.png "Rendered by QuickLaTeX.com")
これによる閉ループ系は、(10)を(1)に代入した

と、(8)、(3)を合わせて
![\displaystyle{(15)\quad \boxed{\left[\begin{array}{c} \dot{x}(t) \\ \dot{x}_I(t) \\ \dot{\hat{x}}(t) \end{array}\right] = \left[\begin{array}{ccc} A & -BF_I & -BF \\ C & 0 & 0 \\ HC_M & -BF_I & A-HC_M-BF \end{array}\right] \left[\begin{array}{c} x(t) \\ x_I(t) \\ \hat{x}(t) \end{array}\right] + \left[\begin{array}{c} w \\ -r \\ 0 \end{array}\right]} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-80e9ab84b8746522c22673f66ba84dda_l3.png "Rendered by QuickLaTeX.com")
のように表されます。そのブロック線図を図1に示します。
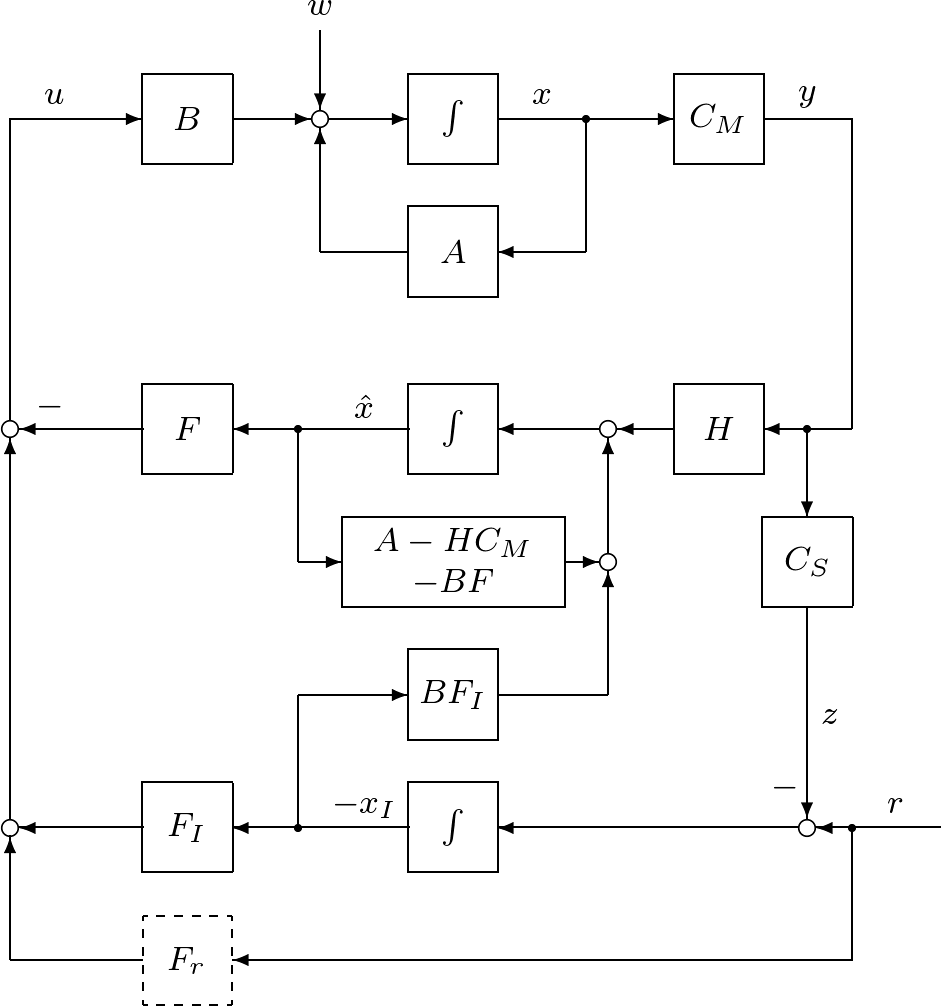 図1 積分動作を加えたオブザーバベースコントローラによる閉ループ系
図1 積分動作を加えたオブザーバベースコントローラによる閉ループ系
●いま、閉ループ系(15)に、座標変換
![\displaystyle{(16)\quad \left[\begin{array}{c} x(t) \\ x_I(t) \\ e(t) \end{array}\right] = \left[\begin{array}{ccc} I_n & 0 & 0 \\ 0 & I_m & 0 \\ -I_n & 0 & I_n \end{array}\right] \left[\begin{array}{c} x(t) \\ x_I(t) \\ \hat{x}(t) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-b5d9f1751dc5c2977110972aa9b6df51_l3.png "Rendered by QuickLaTeX.com")
を行えば
![\displaystyle{(17)\quad \boxed{\left[\begin{array}{c} \dot{x}(t) \\ \dot{x}_I(t) \\\hline \dot{e}(t) \end{array}\right] = \underbrace{ \left[\begin{array}{cc|c} A-BF & -BF_I & -BF \\ C & 0 & 0 \\\hline 0 & 0 & A-HC_M \end{array}\right] }_{ A_{EF}'= \left[\begin{array}{c|c} A_{EF} & - \left[\begin{array}{cc} B \\ 0 \end{array}\right] F \\[5mm] \hline 0 & \widehat{A} \end{array}\right] } \left[\begin{array}{c} x(t) \\ x_I(t) \\\hline e(t) \end{array}\right] + \left[\begin{array}{c} w \\ -r \\\hline -w \end{array}\right]} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e7fd58fcda89d55aeef7eae502bf33d5_l3.png "Rendered by QuickLaTeX.com")
となり、閉ループ系の固有値は、積分動作を加えた状態フィードバックだけの閉ループ系の固有値と状態オブザーバの固有値からなります。
ここで、 は安定行列であるとします。このとき、(17)より
は安定行列であるとします。このとき、(17)より
![\displaystyle{(18)\quad \left[\begin{array}{c} x(t) \\ x_I(t) \\\hline e(t) \end{array}\right] \ \rightarrow\ \underbrace{ \left[\begin{array}{c|c} A_{EF}^{-1} & -A_{EF}^{-1} \left[\begin{array}{cc} B \\ 0 \end{array}\right] F\widehat{A}^{-1} \\[5mm]\hline 0 & \widehat{A}^{-1} \end{array}\right] }_{A_{EF}'\,^{-1}} \left[\begin{array}{c} -w \\ r \\\hline w \end{array}\right] \quad (t\rightarrow\infty) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-7dbdd90fdb25b174ea756263881e7ad1_l3.png "Rendered by QuickLaTeX.com")
ここで
![\displaystyle{(19)\quad S^{-1} \left[\begin{array}{cc} B \\ 0 \end{array}\right] = \left[\begin{array}{cc} 0 \\ I_m \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-2420faf14e949157801558220b085256_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(20)\quad A_{EF}^{-1} = \left[\begin{array}{cc} I_n & 0 \\ -F_I^{-1}F & -F_I^{-1} \end{array}\right] S^{-1} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-18a88b19dc1b190babd996da1ab97eb0_l3.png "Rendered by QuickLaTeX.com")
を用いて



を得ます。したがって、定値外乱が存在するときは状態オブザーバに関して定常偏差が残るにもかかわらず、制御目的(4)が成り立つことがわかります。
[2] 以下に、偏差系E3をLQG制御により安定化して、積分動作を加えたオブザーバベースコントローラを構成する手順を示します。
アルゴリズム <LQGI制御>
ステップ1 被制御変数の決定
![\left[\begin{array}{cc} A & B \\ C & 0 \end{array}\right]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-103603de7e6651c35cea91693aeddce8_l3.png "Rendered by QuickLaTeX.com") が正則となるように(
が正則となるように( )、セレクタ行列
)、セレクタ行列 を決めます。
を決めます。
ステップ2 偏差系の安定化
偏差系
![\displaystyle{(24)\quad \frac{d}{dt} %\underbrace{ \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] %}_{{\tilde x}_E(t)-{\tilde x}_{E\infty}} = \underbrace{ \left[\begin{array}{cc} A & B \\ 0 & 0 \end{array}\right] }_{A_{E}} %\underbrace{ \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] %}_{{\tilde x}_E(t)-{\tilde x}_{E\infty}} + \underbrace{ \left[\begin{array}{c} 0 \\ I_m \end{array}\right] }_{B_{E}} {\dot u}(t) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0d41396e25f50798302fa74e0fcc7e0c_l3.png "Rendered by QuickLaTeX.com")
を、状態フィードバック
![\displaystyle{(25)\quad {\dot u}(t)=- \left[\begin{array}{cc} K & K_I \end{array}\right] \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e4b320427fbae2e9674e6155c38313d0_l3.png "Rendered by QuickLaTeX.com")
によるLQ制御で安定化します。その際、評価関数としては
![\displaystyle{(26)\quad \int_0^\infty \left( \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right]^T Q_E \left[\begin{array}{c} x(t)-x_\infty \\ u(t)-u_\infty \end{array}\right] +{\dot u}^T(t)R_E{\dot u}(t)\right)\,dt }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-e8a6e5b1e487b8f7d4c66618190de067_l3.png "Rendered by QuickLaTeX.com")
を用いる。ただし、 は可観測対とします。
は可観測対とします。
さらに、 と
と を、次式から計算します。
を、次式から計算します。
![\displaystyle{(27)\quad \left[\begin{array}{cc} F & F_I \end{array}\right] = \left[\begin{array}{cc} K & K_I \end{array}\right] \left[\begin{array}{cc} A & B \\ C & 0 \end{array}\right]^{-1} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-ca6faa6fddfe377aeac1be02ca550a8a_l3.png "Rendered by QuickLaTeX.com")
ステップ3 オブザーバゲイン の決定
の決定
行列 を、
を、 が可制御対となるように選び、重み行列
が可制御対となるように選び、重み行列 と
と を指定し
を指定し

を解いて、 を求め、オブザーバゲインをつぎのように定めます。
を求め、オブザーバゲインをつぎのように定めます。

ステップ4 LQGIコントローラの構成
 、、、から、つぎを構成します。
、、、から、つぎを構成します。
![\displaystyle{(30)\quad \dot{x}_K(t)=A_Kx_K(t)+B_K \left[\begin{array}{c} y(t) \\ r \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-743179063328bea375e70a927a97deef_l3.png "Rendered by QuickLaTeX.com")

ただし
![\displaystyle{(32)\quad A_K= \left[\begin{array}{cc} A-HC_M-BF & -BF_I \\ 0\,(m\times n) & 0\,(m\times m) \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-0b034cbb3192802be0a50270adc32ed4_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(33)\quad B_K= \left[\begin{array}{cc} H & 0\,(n\times m)\\ C_S & -I_m \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-eb93be3f1c87c2aac29cc915f7737dbc_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(34)\quad C_K=- \left[\begin{array}{cc} F & F_I \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c9151e08e8d2e18c38d2d2dc1cefabec_l3.png "Rendered by QuickLaTeX.com")
この手順で設計された積分動作を加えた状態フィードバックによる制御方式をLQGI制御(LQG control with integral action)と呼びます。