104
105
111
112
113
114
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
|
data2["S01_B041P_20"]=['S01_B041P_20__11Lx12B_出棟', 5, 1, d1-1, ['S01_B041P_21', 'S01_B041P_24', '0', '0', '0'], [[0, -1], [0, -1], [0, 0], [0, 0], [0, 0]], [[19, 12, 23, 2, 14]], 0, [11, 12, 0], 132]
data2["S01_B041P_24"]=['S01_B041P_24__11Lx12B_甲配', 16, 0, 0, ['S01_B041P_30', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 42-4*10]
data2["S01_B061S_10"]=['S01_B061S_10__14Lx13B_正転', 3, 1, d1-1, ['S01_B061S_11', 'S01_B061S_12', 'S01_B061S_13', '0', '0'], [[0, -1], [0, -1], [0, -1], [0, 0], [0, 0]], [[4, -2, 11, 29, 43]], 0, [13, 14, 0], 182]
data2["S01_B061S_12"]=['S01_B061S_12__14Lx13B_溶接', 11, 0, 0, ['S01_B061S_20', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 204-4*10]
data2["S01_B061S_13"]=['S01_B061S_13__14Lx13B_甲配', 16, 0, 0, ['S01_B061S_20', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 60-3*10]
data2["S01_B101P_00"]=['S01_B101P_00__14Lx9B_開始', 1, 1, d1-1, ['S01_B101P_01', 'S01_B101P_02', '0', '0', '0'], [[0, -1], [0, -1], [0, 0], [0, 0], [0, 0]], [[2, 44, 58, 2, 11]], 0, [14, 9, 0], 126]
data2["S01_B101P_02"]=['S01_B101P_02__14Lx9B_取付', 10, 0, 0, ['S01_B101P_03', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 0, 114-8*10]
data2["S01_B101P_03"]=['S01_B101P_03__14Lx9B_溶接', 11, 0, 0, ['S01_B101P_04', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 0, 136]
data2["S01_B101P_04"]=['S01_B101P_04__14Lx9B_取付', 12, 0, 0, ['S01_B101P_05', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 0, 76]
data2["S01_B101P_05"]=['S01_B101P_05__14Lx9B_溶接', 13, 0, 0, ['S01_B101P_10', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 68]
data2["S01_B101S_00"]=['S01_B101S_00__14Lx12B_開始', 1, 1, d1-1, ['S01_B101S_01', 'S01_B101S_04', '0', '0', '0'], [[0, -1], [0, -1], [0, 0], [0, 0], [0, 0]], [[2, 16, 30, 1, 13]], 0, [14, 12, 0], 168]
data2["S01_B101S_04"]=['S01_B101S_04__14Lx12B_取付', 12, 0, 0, ['S01_B101S_05', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 0, 76]
data2["S01_B101S_05"]=['S01_B101S_05__14Lx12B_溶接', 13, 0, 0, ['S01_B101S_10', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 68]
data2["S01_B114C_00"]=['S01_B114C_00__13Lx12B_開始', 1, 1, d1-1, ['S01_B114C_01', 'S01_B114C_03', '0', '0', '0'], [[0, -1], [0, -1], [0, 0], [0, 0], [0, 0]], [[3, 27, 40, 3, 15]], 0, [13, 12, 0], 156]
data2["S01_B114C_03"]=['S01_B114C_03__13Lx12B_溶接', 11, 0, 0, ['S01_B114C_04', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 0, 204-12*10]
data2["S01_B114C_04"]=['S01_B114C_04__13Lx12B_取付', 12, 0, 0, ['S01_B114C_05', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 0, 76]
data2["S01_B114C_05"]=['S01_B114C_05__13Lx12B_溶接', 13, 0, 0, ['S01_B114C_10', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 10]
data2["S01_B175C_00"]=['S01_B175C_00__13Lx11B_開始', 1, 1, d1-1, ['S01_B175C_01', 'S01_B175C_04', '0', '0', '0'], [[0, -1], [0, -1], [0, 0], [0, 0], [0, 0]], [[6, 27, 40, 1, 12]], 0, [13, 11, 0], 143]
data2["S01_B175C_04"]=['S01_B175C_04__13Lx11B_取付', 10, 0, 0, ['S01_B175C_10', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 16]
data2["S01_B195C_00"]=['S01_B195C_00__13Lx13B_開始', 1, 1, d1-1, ['S01_B195C_01', 'S01_B195C_03', '0', '0', '0'], [[0, -1], [0, -1], [0, 0], [0, 0], [0, 0]], [[6, 40, 53, -2, 11]], 0, [13, 13, 0], 169]
data2["S01_B195C_03"]=['S01_B195C_03__13Lx13B_溶接', 11, 0, 0, ['S01_B195C_04', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 0, 48]
data2["S01_B195C_04"]=['S01_B195C_04__13Lx13B_取付', 10, 0, 0, ['S01_B195C_10', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 16]
|


![\displaystyle{(3)\quad {\bf f}=\left[\begin{array}{c} f_(x_1)\\ \vdots\\ f_(x_n)\\ \end{array}\right],\ {\bf g}=\left[\begin{array}{c} g_(x_1)\\ \vdots\\ g_(x_n)\\ \end{array}\right] \Rightarrow <\bf f},{\bf g}>=\sum_{k=1}^{n}f(x_k)\bar{g}(x_k) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-6c60f7f68c795227f36ebe0953444f95_l3.png "Rendered by QuickLaTeX.com")

 -periodic
-periodic  on
on ![[-\pi,\pi]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c85b0671edf2d397cb22f5e9a48deb1c_l3.png "Rendered by QuickLaTeX.com") is projected onto
is projected onto 








 -periodic
-periodic  is projected onto
is projected onto 




![\displaystyle{(1)\quad X=\left[\begin{array}{ccccc} x_1 & x_2 & \cdots & x_m \end{array}\right]\in{\bf C}^{n\times m} \quad(x_1,x_2,\cdots,x_n\in{\bf C}^n) }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-cf802e01cf8cfcadd2f65dfa5a2b9a52_l3.png "Rendered by QuickLaTeX.com")
 はn次元数ベクトルですが、データ駆動分野では、nの値は数個ではなく、数千、数万のオーダーになります。
はn次元数ベクトルですが、データ駆動分野では、nの値は数個ではなく、数千、数万のオーダーになります。 をサイズ
をサイズ の複素行列(
の複素行列( )とします。このとき、ユニタリ行列
)とします。このとき、ユニタリ行列 と
と が存在して
が存在して
 )。ここで、実行列
)。ここで、実行列 は次のように表されます。
は次のように表されます。![\displaystyle{(2.2)\quad \Sigma= \left[\begin{array}{cc} \widehat{\Sigma} & 0_{k\times m-k}\\ 0_{n-k\times k} & 0_{n-k\times m-k} \end{array}\right]\in{\bf R}^{n\times m} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-c5cdbd2df9218b7be02488fdad35c96f_l3.png "Rendered by QuickLaTeX.com")

 とします。このとき(2)は次式となります。
とします。このとき(2)は次式となります。![\displaystyle{(3.1)\quad X= \underbrace{\left[\begin{array}{cc} U_1 & U_2 \end{array}\right]}_{U} \underbrace{\left[\begin{array}{cc} \Sigma_1 \\ 0_{n-m\times m} \end{array}\right]}_{\Sigma}V^H =U_1\Sigma_1V^H }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-99bd7ee8f04376d8692adff04183fc9d_l3.png "Rendered by QuickLaTeX.com")

 とします。すなわち微小な
とします。すなわち微小な に対して
に対して
![\displaystyle{(5.1)\quad X\approx \widetilde{X}= \underbrace{\left[\begin{array}{cc} \widetilde{U} & \cdot \end{array}\right]}_{U} \underbrace{\left[\begin{array}{cc} \widetilde{\Sigma} & 0_{r\times m-r} \\ 0_{n-r\times r} & 0_{n-r\times m-r} \end{array}\right]}_{\Sigma'} \underbrace{\left[\begin{array}{c} \widetilde{V}^H\\ \cdot \end{array}\right]}_{V^H} =\widetilde{U}\widetilde{\Sigma}\widetilde{V}^H }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-50accba44fba6606c36c904e16bc41ef_l3.png "Rendered by QuickLaTeX.com")


 または
または は、(3.1)より、次式のように表されます。
は、(3.1)より、次式のように表されます。![\displaystyle{(7.1)\quad \begin{array}{l} XX^H=U\left[\begin{array}{cc} \Sigma_1 \\ 0_{n-m\times m} \end{array}\right] \underbrace{V^HV}_{I_m}\left[\begin{array}{cc} \Sigma_1 & 0_{m\times n-m} \end{array}\right] U^H\\=U\left[\begin{array}{cc} \Sigma_1^2 & 0_{m\times n-m} \\ 0_{n-m\times m} & 0_{n-m\times n-m} \end{array}\right] U^H \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-37129f9819eafc06f911de1c423061d5_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(7.2)\quad X^HX=V\left[\begin{array}{cc} \Sigma_1 & 0_{m\times n-m} \end{array}\right] \underbrace{U^HU}_{I_n}\left[\begin{array}{cc} \Sigma_1 \\ 0_{n-m\times m} \end{array}\right] V^H=V\Sigma_1^2 V^H }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-826d5fbe94126670ef95066af033718f_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle{(8.1)\quad \begin{array}{l} XX^HU=U\left[\begin{array}{cc} \Sigma_1^2 & 0_{m\times n-m} \\ 0_{n-m\times m} & 0_{n-m\times n-m} \end{array}\right] \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-41926b35526603934076e11772a44f36_l3.png "Rendered by QuickLaTeX.com")

 の場合は
の場合は
 と
と を、次式により求めることが行われます。
を、次式により求めることが行われます。


 はフルランク(
はフルランク( )とします。
)とします。
 の場合(未知数の数が方程式の数より大きい場合)、(12)はunder-determined(劣決定)と呼ばれ、
の場合(未知数の数が方程式の数より大きい場合)、(12)はunder-determined(劣決定)と呼ばれ、![\displaystyle{(13)\quad \begin{array}{l} \underbrace{U\left[\begin{array}{cc} \Sigma_1 & 0_{n\times m-n} \end{array}\right] \left[\begin{array}{c} V_1^H\\ V_2^H \end{array}\right]}_{A}x =U\Sigma_1V_1^Hx=b\\ \Sigma_1={\rm diag}\{\sigma_1,\cdots,\sigma_n\} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-4f791add1eb96eaee255b69310154b7c_l3.png "Rendered by QuickLaTeX.com")

 より第1項と第2項は直交することから
より第1項と第2項は直交することから
 として得られる
として得られる は、
は、 を最小化する最小ノルム解と呼ばれます。
を最小化する最小ノルム解と呼ばれます。
 の場合(未知数の数が方程式の数より小さい場合)、(12)はover-determined(過決定)と呼ばれ、
の場合(未知数の数が方程式の数より小さい場合)、(12)はover-determined(過決定)と呼ばれ、![\displaystyle{(16)\quad \begin{array}{l} \underbrace{\left[\begin{array}{cc} U_1 & U_2 \end{array}\right] \left[\begin{array}{cc} \Sigma_1 \\ 0_{n-m\times m} \end{array}\right]V^H}_{A}x =U_1\Sigma_1V^Hx=b\\ \Sigma_1={\rm diag}\{\sigma_1,\cdots,\sigma_m\} \end{array} }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-f04b8282f4b6654dd14f62be976fdae5_l3.png "Rendered by QuickLaTeX.com")

 において、
において、
 より第1項と第2項は直交することから
より第1項と第2項は直交することから
 を最小化する最小2乗解と呼ばれます。
を最小化する最小2乗解と呼ばれます。![\displaystyle{(12)\quad X=\left[\begin{array}{c} X_{11},\cdots,X_{1m}\\ \vdots\\ %X_{i1},\cdots,X_{im}\\ %\vdots\\ X_{n1},\cdots,X_{nm}\\ \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-191eb11d289ee99d4f776f71f3262037_l3.png "Rendered by QuickLaTeX.com")
 回の観測が行われ、各観測では
回の観測が行われ、各観測では 個のデータを得るものとしています。これから
個のデータを得るものとしています。これから![\displaystyle{(13)\quad \bar{X}=\left[\begin{array}{c} 1\\ \vdots\\ 1 \end{array}\right] \left[\begin{array}{c} \displaystyle{\frac{1}{n}\sum_{i=1}^nX_{i1},\cdots,\frac{1}{n}\sum_{i=1}^nX_{im}} \end{array}\right] }](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-992a3a3cd6f8f8980920c01cb001b6df_l3.png "Rendered by QuickLaTeX.com")
 の特異値分解を
の特異値分解を




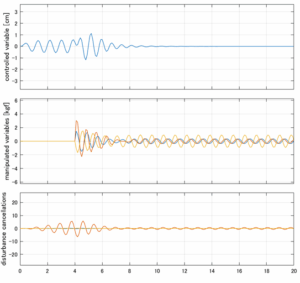
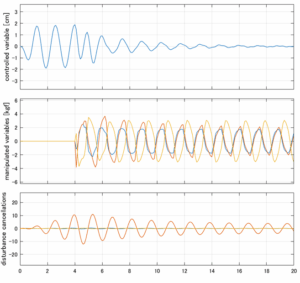
 、長周期は
、長周期は とします。
とします。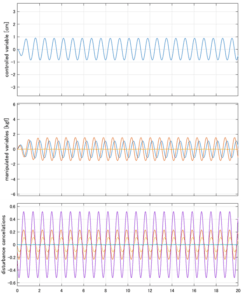
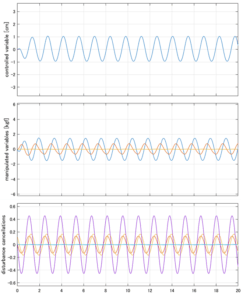

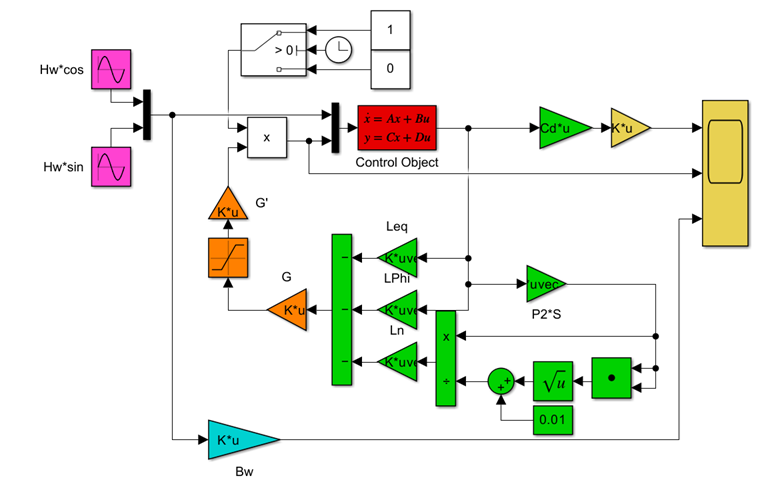
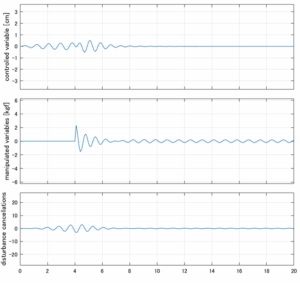
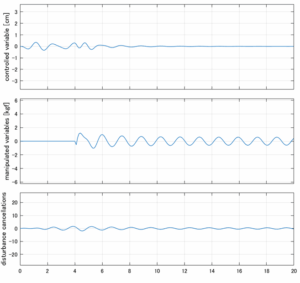
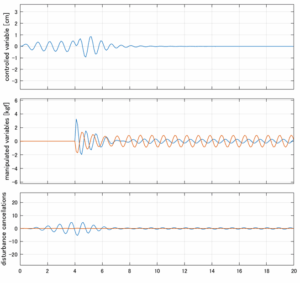
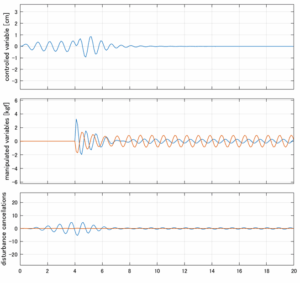
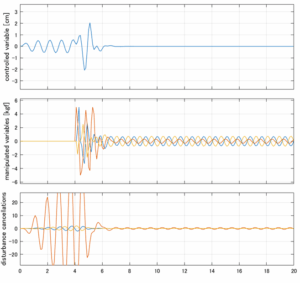
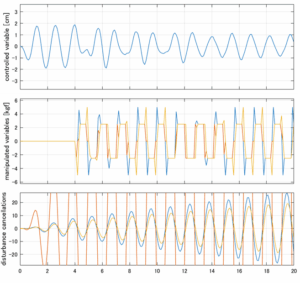
![H_w=0.01[m]](https://cacsd1.sakura.ne.jp/wp/wp-content/ql-cache/quicklatex.com-29ad5891f18c1e9f7fab6fb079df99b3_l3.png "Rendered by QuickLaTeX.com") とする。
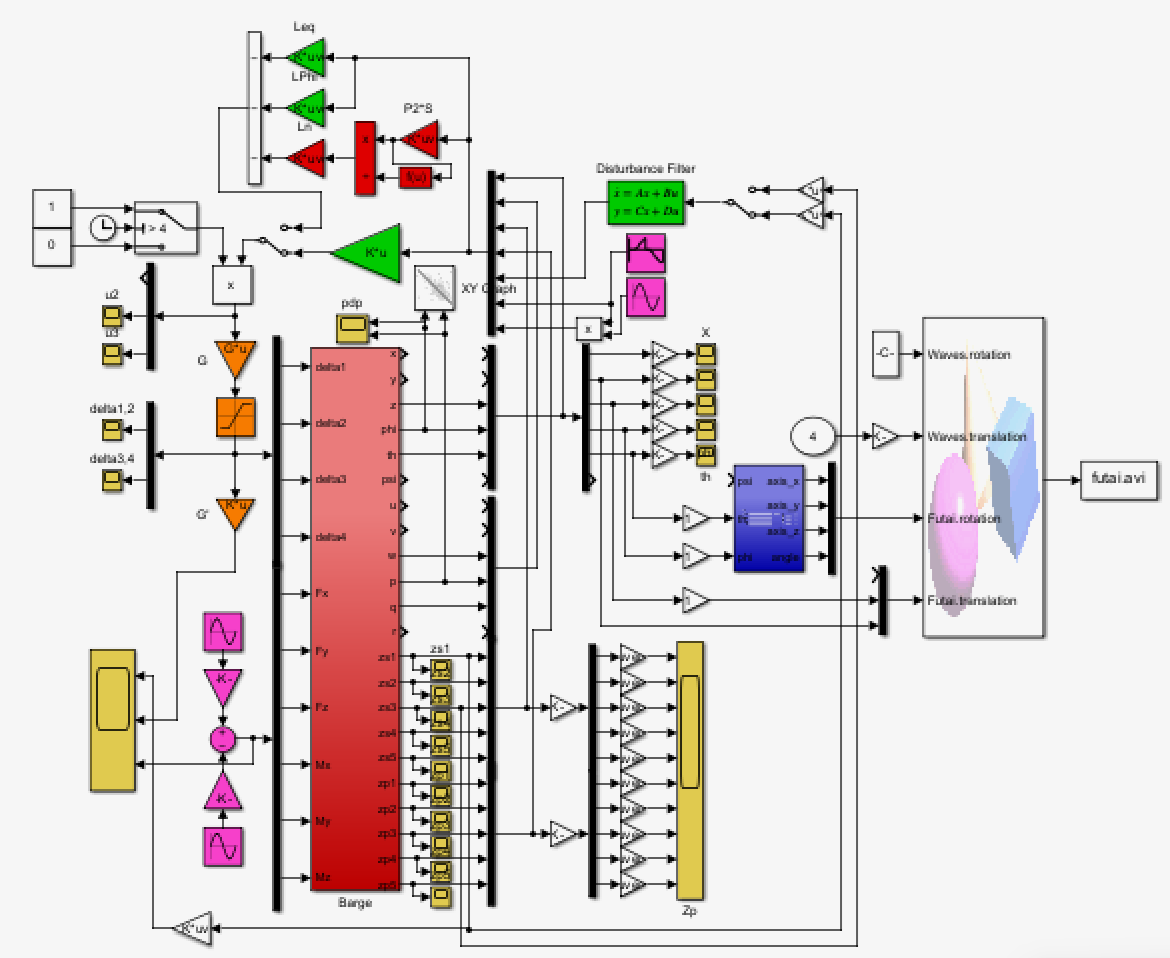
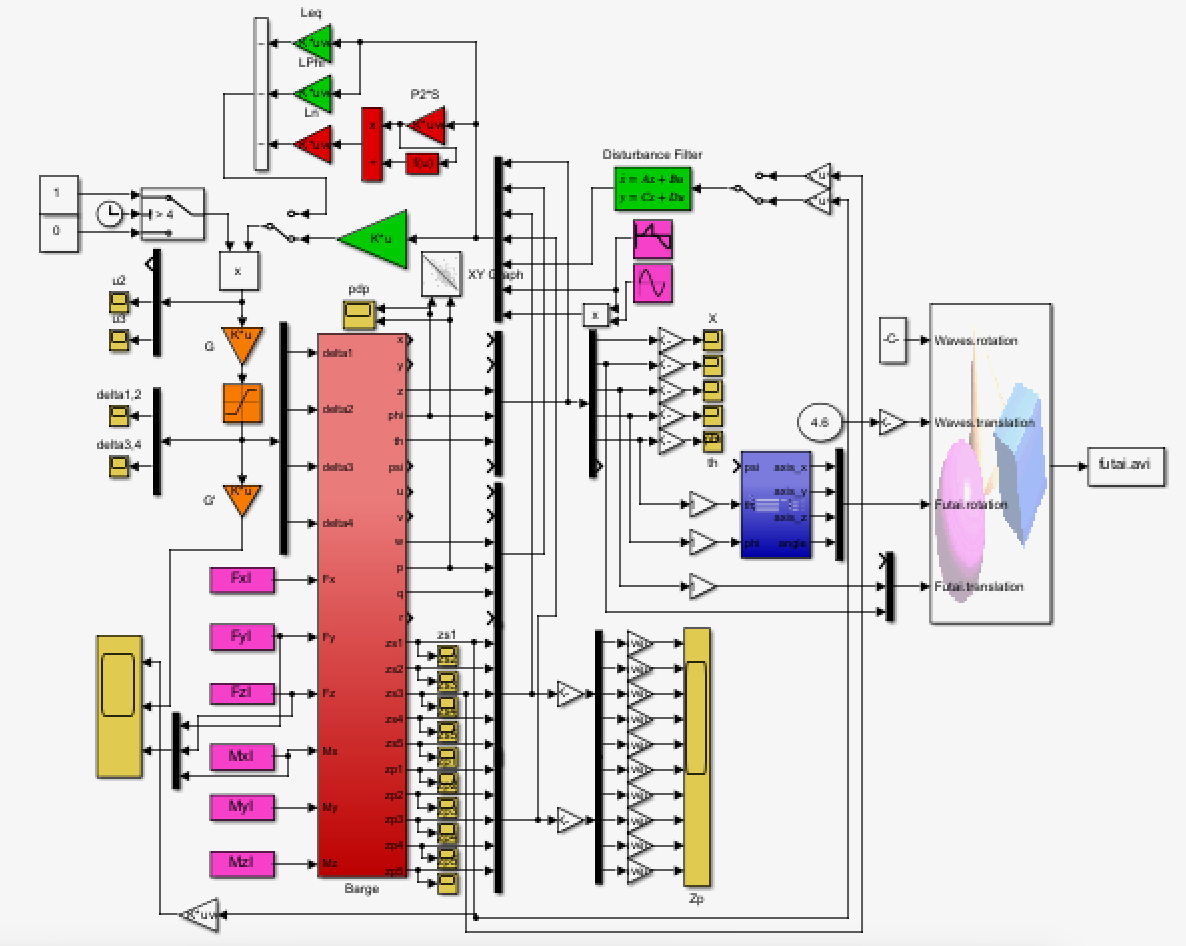
とする。 は制御目的を達成するための望ましい
は制御目的を達成するための望ましい であるが、これは4つのスラスタに次式で配分する。
であるが、これは4つのスラスタに次式で配分する。