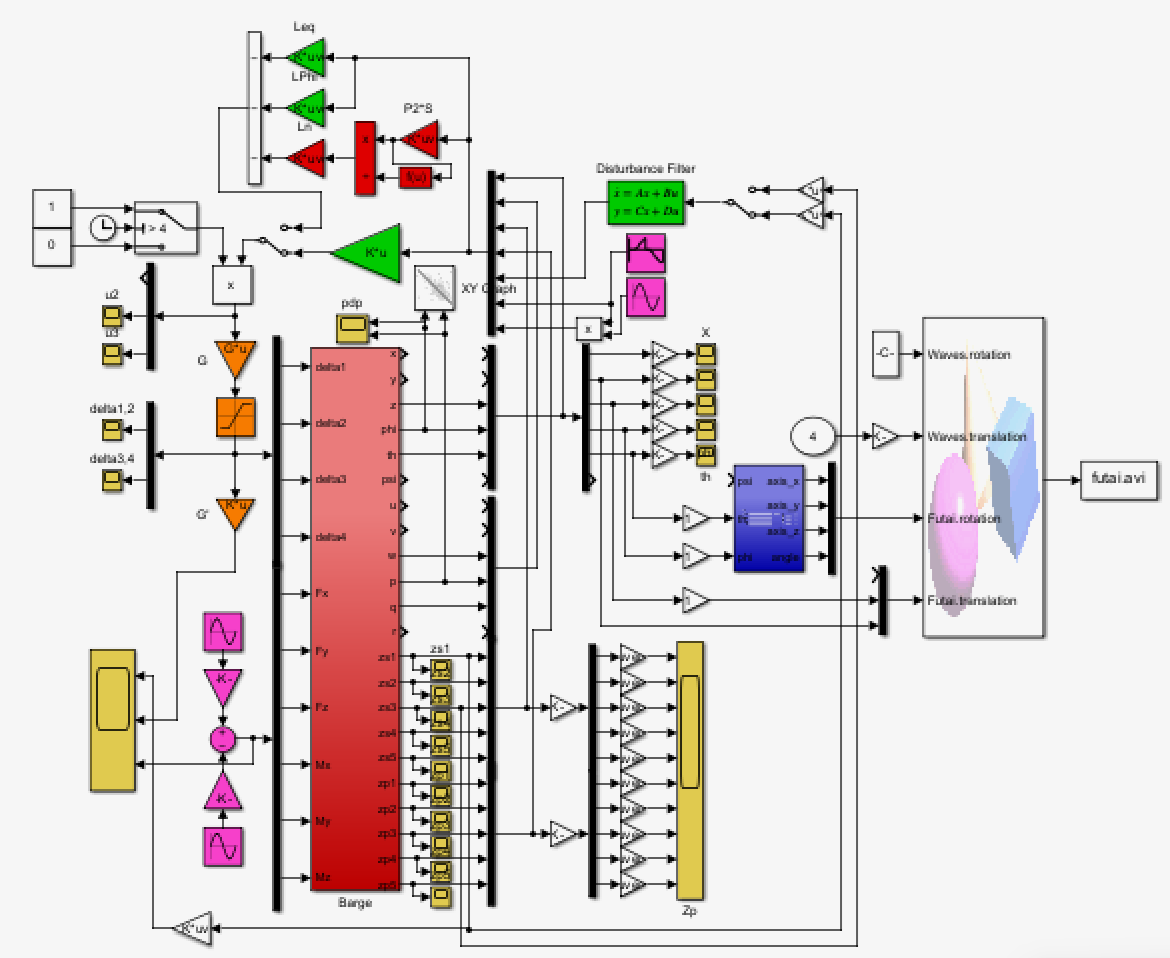
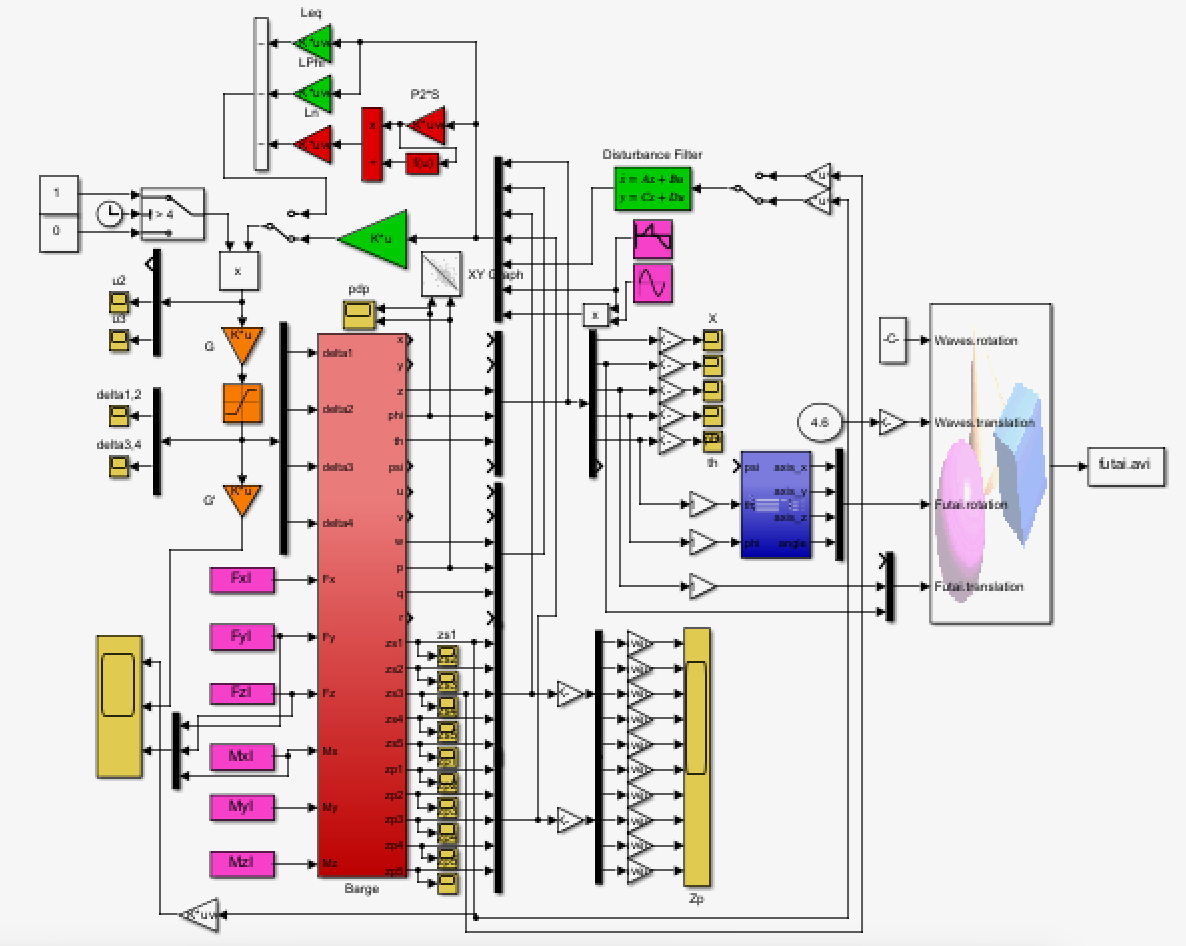
●制御対象(赤)
\left\{\begin{array}{l}
\dot{\vec x}=A(T_w){\vec x}+B(T_w)\vec{u}+B_w(T_w,\beta){\vec w}(T_w),\ {\vec x}(0)={\vec x}_0\\
{\vec y}_M=C_M{\vec x}\\
y=\underbrace{C_SC_M}_{C}{\vec x}
\end{array}\right.
●外乱信号(赤紫)
{\vec w}(T_w)=\left[\begin{array}{l}
H_w\sin\frac{2\pi}{T_w} t \\
H_w\cos\frac{2\pi}{T_w} t
\end{array}\right]
不規則波については時系列データを準備。
●外乱推定に用いる観測変数(緑)
y_d=C_d{\vec x}
主に制御点の縦変位を取る。
●外乱フィルタ(緑)
\dot{\hat{\vec x}}_d=A_d(T_w)\hat{{\vec x}}_d+B_d(T_w){y}_d,\ \hat{x}_d(0)=0
●非線形要素
-スラスタ伝達静特性:3次関数(V-F表)、入力電圧不感帯-1V~0V
-スラスタ伝達動特性:1次遅れ、時定数1/sqrt(50)、2/sqrt(50)、…
-スラスタ入力電圧リミッタ:±2.5V、±5V
●LQ制御/H∞制御
\vec{u}=-F(T_w)\vec{x}
●LQIM制御/H∞IM制御
\vec{u}=-F(T_w)\vec{x}-F_d(T_w)\hat{\vec{x}}_d
●SM制御



このとき、次の諸ケースについて、非線形シミュレーションを行ないます。ただし、短周期は 、長周期は
、長周期は とします。
とします。
| 制御方式 | 横波短周期 | 横波長周期 | 斜波短周期 | 斜波長周期 |
|---|---|---|---|---|
| LQ制御 | Case 4.1 | Case 4.2 | Case 4.3 | Case 4.4 |
| H∞制御 | Case 4.5 | Case 4.6 | Case 4.7 | Case 4.8 |
| SM制御 | Case 4.9 | Case 4.10 | Case 4.11 | Case 4.12 |
| LQIM制御 | Case 4.13 | Case 4.14 | Case 4.15 | Case 4.16 |
| H∞IM制御 | Case 4.17 | Case 4.18 | Case 4.19 | Case 4.20 |
| 制御方式 | 不規則波1 | 不規則波2 | 時間遅れ | 入力電圧制限 |
|---|---|---|---|---|
| LQ制御 | Case 5.1 | Case 5.2 | Case 5.3 | Case 5.4 |
| H∞制御 | Case 5.5 | Case 5.6 | Case 5.7 | Case 5.8 |
| SM制御 | Case 5.9 | Case 5.10 | Case 5.11 | Case 5.12 |
| LQIM制御 | Case 5.13 | Case 5.14 | Case 5.15 | Case 5.16 |
| H∞IM制御 | Case 5.17 | Case 5.18 | Case 5.19 | Case 5.20 |
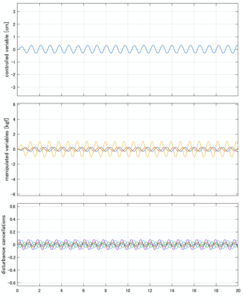
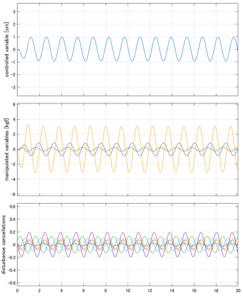
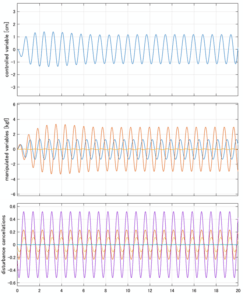
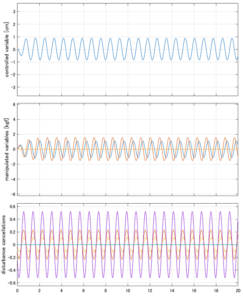
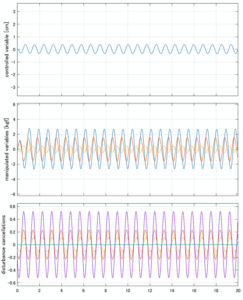
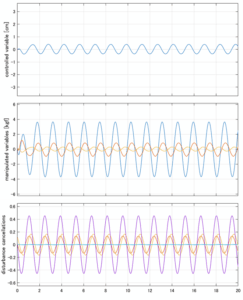
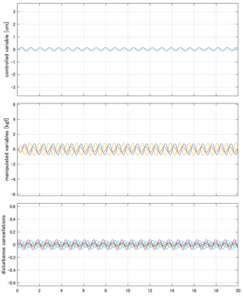
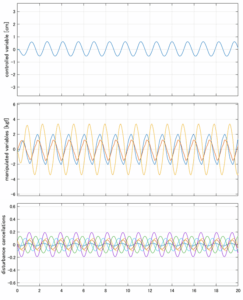
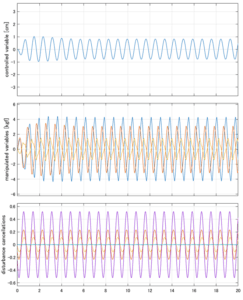
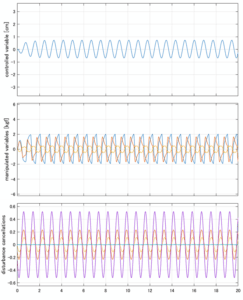
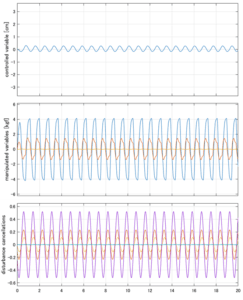
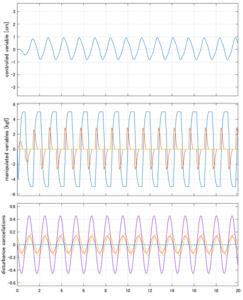
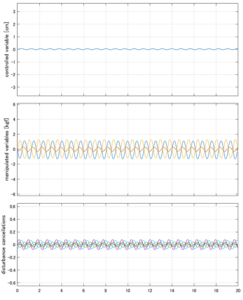
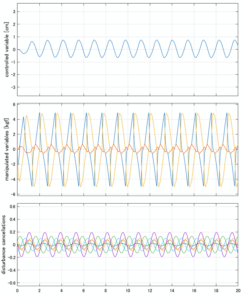
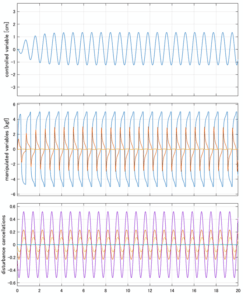
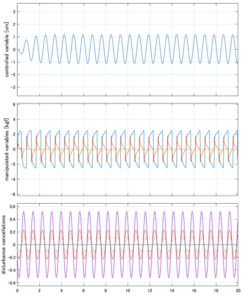
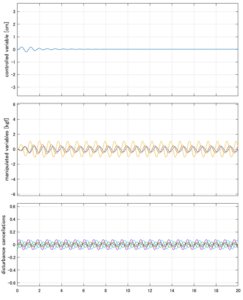
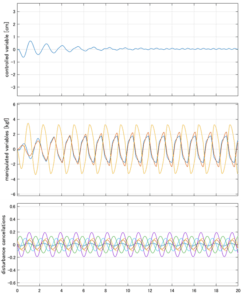
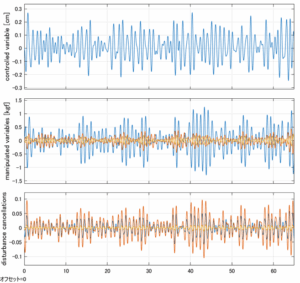
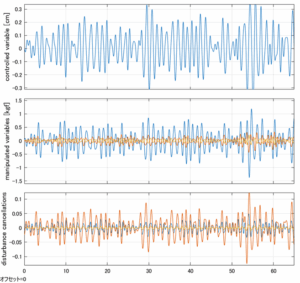
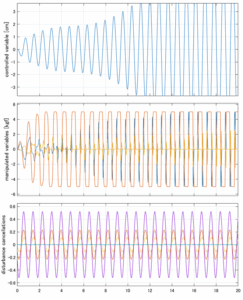
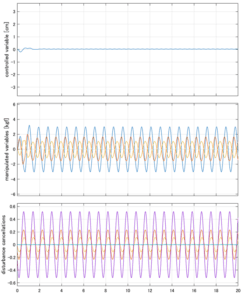
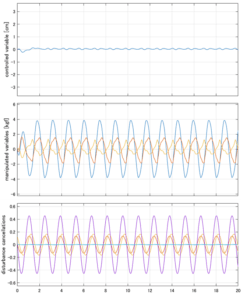
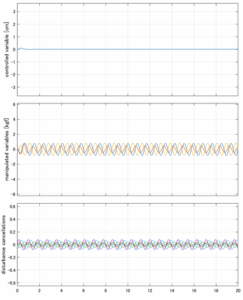
LQ制御
Case 4.1(横波、短周期規則波) Case 4.2(横波、長周期規則波)
Case 4.3(斜波、短周期規則波) Case 4.4(斜波、長周期規則波)
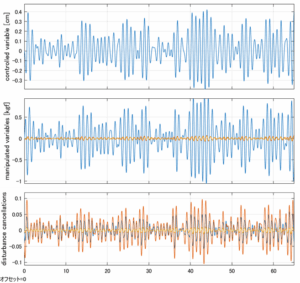
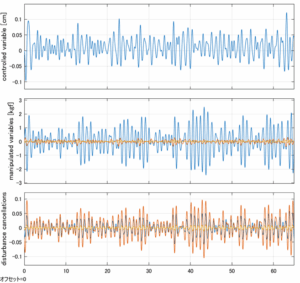
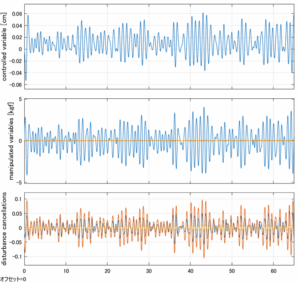
Case 5.1(横波、不規則波1)
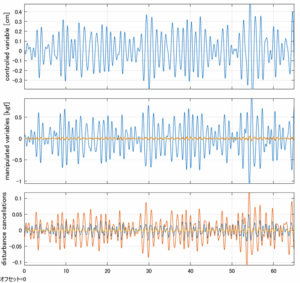
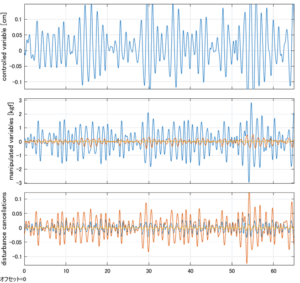
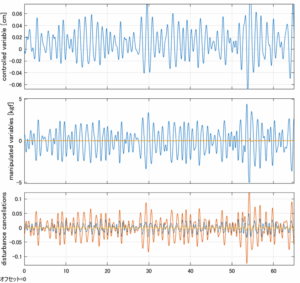
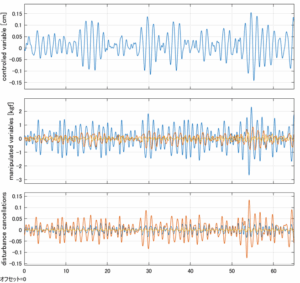
Case 5.2(横波、不規則波2)
Case 5.3(横波、時間遅れ1秒) Case 5.4(横波、リミッタ2.5V)
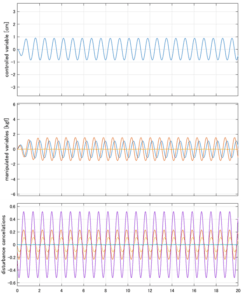
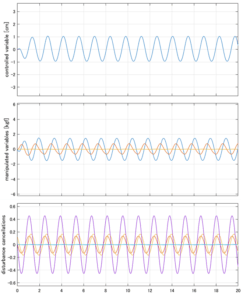
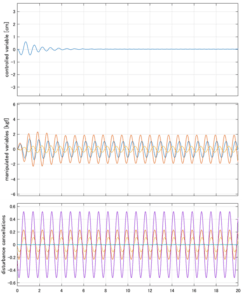
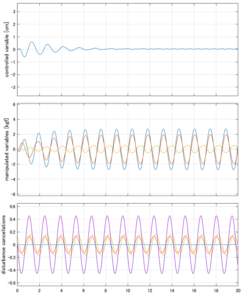
H∞制御
Case 4.5(横波、短周期規則波) Case 4.6(横波、長周期規則波)
Case 4.7(斜波、短周期規則波) Case 4.8(斜波、長周期規則波)
Case 5.5(横波、不規則波1)
Case 5.6(横波、不規則波2)
Case 5.7(横波、時間遅れ1秒) Case 5.8(横波、リミッタ2.5V)
SM制御
Case 4.9(横波、短周期規則波)
Case 4.11(斜波、短周期規則波) Case 4.12(斜波、長周期規則波)
Case 5.9(横波、不規則波1)
Case 5.10(横波、不規則波2)
Case 5.11(横波、時間遅れ1秒) Case 5.12(横波、リミッタ2.5V)
LQIM制御
Case 4.13(横波、短周期規則波) Case 4.14(横波、長周期規則波)
Case 4.15(斜波、短周期規則波) Case 4.16(斜波、長周期規則波)
Case 5.13(横波、不規則波1)
Case 5.14(横波、不規則波2)
Case 5.15(横波、時間遅れ) Case 5.16()
H∞IM制御
Case 4.17(横波、短周期規則波) Case 4.18(横波、長周期規則波)
Case 4.19(斜波、短周期規則波) Case 4.20(斜波、長周期規則波)
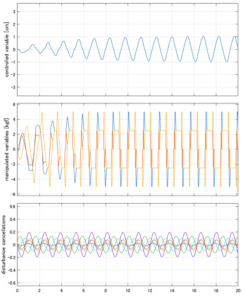
Case 5.17(横波、不規則波1)
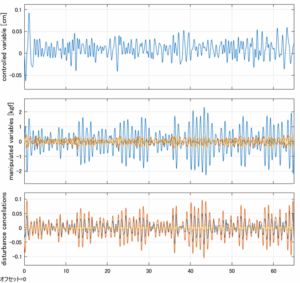
Case 5.18(横波、不規則波2)
Case 5.19(横波、時間遅れ) Case 5.20()
