104
105
111
112
113
114
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
|
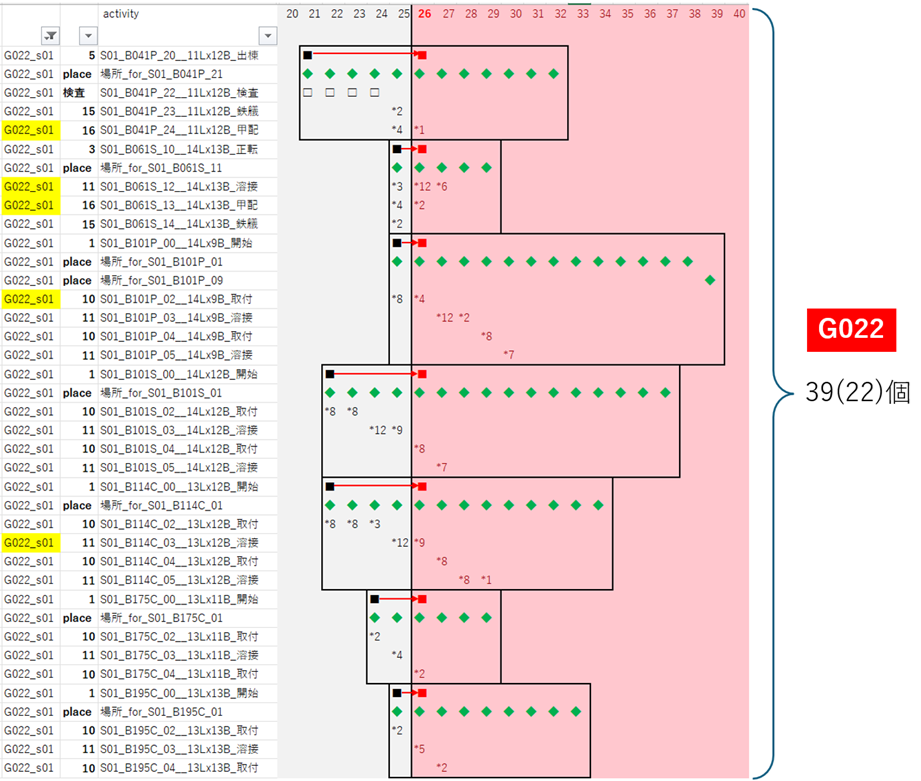
data2["S01_B041P_20"]=['S01_B041P_20__11Lx12B_出棟', 5, 1, d1-1, ['S01_B041P_21', 'S01_B041P_24', '0', '0', '0'], [[0, -1], [0, -1], [0, 0], [0, 0], [0, 0]], [[19, 12, 23, 2, 14]], 0, [11, 12, 0], 132]
data2["S01_B041P_24"]=['S01_B041P_24__11Lx12B_甲配', 16, 0, 0, ['S01_B041P_30', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 42-4*10]
data2["S01_B061S_10"]=['S01_B061S_10__14Lx13B_正転', 3, 1, d1-1, ['S01_B061S_11', 'S01_B061S_12', 'S01_B061S_13', '0', '0'], [[0, -1], [0, -1], [0, -1], [0, 0], [0, 0]], [[4, -2, 11, 29, 43]], 0, [13, 14, 0], 182]
data2["S01_B061S_12"]=['S01_B061S_12__14Lx13B_溶接', 11, 0, 0, ['S01_B061S_20', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 204-4*10]
data2["S01_B061S_13"]=['S01_B061S_13__14Lx13B_甲配', 16, 0, 0, ['S01_B061S_20', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 60-3*10]
data2["S01_B101P_00"]=['S01_B101P_00__14Lx9B_開始', 1, 1, d1-1, ['S01_B101P_01', 'S01_B101P_02', '0', '0', '0'], [[0, -1], [0, -1], [0, 0], [0, 0], [0, 0]], [[2, 44, 58, 2, 11]], 0, [14, 9, 0], 126]
data2["S01_B101P_02"]=['S01_B101P_02__14Lx9B_取付', 10, 0, 0, ['S01_B101P_03', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 0, 114-8*10]
data2["S01_B101P_03"]=['S01_B101P_03__14Lx9B_溶接', 11, 0, 0, ['S01_B101P_04', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 0, 136]
data2["S01_B101P_04"]=['S01_B101P_04__14Lx9B_取付', 12, 0, 0, ['S01_B101P_05', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 0, 76]
data2["S01_B101P_05"]=['S01_B101P_05__14Lx9B_溶接', 13, 0, 0, ['S01_B101P_10', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 68]
data2["S01_B101S_00"]=['S01_B101S_00__14Lx12B_開始', 1, 1, d1-1, ['S01_B101S_01', 'S01_B101S_04', '0', '0', '0'], [[0, -1], [0, -1], [0, 0], [0, 0], [0, 0]], [[2, 16, 30, 1, 13]], 0, [14, 12, 0], 168]
data2["S01_B101S_04"]=['S01_B101S_04__14Lx12B_取付', 12, 0, 0, ['S01_B101S_05', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 0, 76]
data2["S01_B101S_05"]=['S01_B101S_05__14Lx12B_溶接', 13, 0, 0, ['S01_B101S_10', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 68]
data2["S01_B114C_00"]=['S01_B114C_00__13Lx12B_開始', 1, 1, d1-1, ['S01_B114C_01', 'S01_B114C_03', '0', '0', '0'], [[0, -1], [0, -1], [0, 0], [0, 0], [0, 0]], [[3, 27, 40, 3, 15]], 0, [13, 12, 0], 156]
data2["S01_B114C_03"]=['S01_B114C_03__13Lx12B_溶接', 11, 0, 0, ['S01_B114C_04', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 0, 204-12*10]
data2["S01_B114C_04"]=['S01_B114C_04__13Lx12B_取付', 12, 0, 0, ['S01_B114C_05', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 0, 76]
data2["S01_B114C_05"]=['S01_B114C_05__13Lx12B_溶接', 13, 0, 0, ['S01_B114C_10', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 10]
data2["S01_B175C_00"]=['S01_B175C_00__13Lx11B_開始', 1, 1, d1-1, ['S01_B175C_01', 'S01_B175C_04', '0', '0', '0'], [[0, -1], [0, -1], [0, 0], [0, 0], [0, 0]], [[6, 27, 40, 1, 12]], 0, [13, 11, 0], 143]
data2["S01_B175C_04"]=['S01_B175C_04__13Lx11B_取付', 10, 0, 0, ['S01_B175C_10', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 16]
data2["S01_B195C_00"]=['S01_B195C_00__13Lx13B_開始', 1, 1, d1-1, ['S01_B195C_01', 'S01_B195C_03', '0', '0', '0'], [[0, -1], [0, -1], [0, 0], [0, 0], [0, 0]], [[6, 40, 53, -2, 11]], 0, [13, 13, 0], 169]
data2["S01_B195C_03"]=['S01_B195C_03__13Lx13B_溶接', 11, 0, 0, ['S01_B195C_04', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 0, 48]
data2["S01_B195C_04"]=['S01_B195C_04__13Lx13B_取付', 10, 0, 0, ['S01_B195C_10', '0', '0', '0', '0'], [[0, 0], [0, 0], [0, 0], [0, 0], [0, 0]], 0, 0, 1, 16]
|